频率跟踪,相位跟踪
什么是AFC(AFT)电路?

什么是AFC(AFT)电路?AFC(或AFT)是“自动频率控制”(或“自动频率调整”)的英文缩写。
AFC电路在电子设备中被广泛用作重要稳频或锁相的电路中。
这个电路功能有二:一是对接收信号频率的跟踪与锁定;二是相位的跟踪与锁定。
彩电中高频调谐器的本振电路就利用了AFC的频率跟踪特性,电路结构见图l。
外来的高频电视信号与高频头本振电路送出的振荡信号.在混频器中差频,得到38MHz的图像中频信号,再送入中放电路。
若混频器输出的图像中频信号频率偏离38MHz,鉴频器将能检测其变化,并转换成对应的直流电压Uafc去微调本振频率。
这个直流电压就是AFC电压,用以保证混频器输出的中频信号频率始终为38MHz。
值得一提的是:现在新型彩电的高频头已取消了AFC端子,由鉴频器输出的AFC控制电压,将送至CPU的AFC输入端子。
然后控制CPU输出的VT调谐电压,使高频头输出的中频信号频率被锁定在38MHz。
彩电行电路中,也利用了AFC的频率与相位跟踪特性。
行AFC电路结构见图2。
若行振荡器输出的行频为15625Hz,经行输出变压器反馈的行逆程脉冲与行同步信号,在鉴相器内进行比较,输出的相位控制电压将为零。
若行振荡器输出的行频或相位发生偏离,则反馈回鉴相器的行逆程脉冲与输入鉴相器的行同步信号经比较后,就会有一误差电压输出。
这个电压称为行AFC电压,用来纠正行振荡器输出的频率及相位。
需补充的是,现在彩电的行AFC功能一般在视频IC内部完成(如TDA8362),并有AFC1与AFC2两部分。
其中AFC1环路功能是将行同步信号与行振荡信号进行频率和相位比较,并能输出与相位差成正比的误差电流去控制行振荡器的频率与相位。
同步后的行频信号再加至AFC2环路,与输入的行逆程脉冲信号进行相位比较,以保证图像在屏幕上的居中位置。
参考:两句话,在电视机中AFT自动频率微调,控制调谐的由于不能克服的原因导致频率微小的偏移,AFT能自动矫正过来当AFT不能矫正时,就是我们说的跑台了AFC自动频率控制,用于控制行同步范围、行相位的AGC自动增益控制,控制电压信号的增益不要过大失真APC自动色相控制,控制解码电路识别逐行倒相ABL自动亮度束流控制,束流变化自动控制亮度或对比度的变化在电子设备中,为了提高电路的性能指标,广泛采用各种类型的控制电路,这些控制电路都是利用负反馈的原理实现对自身的调节与控制,因此统称为反馈控制电路。
频率范围为1KHZ~100KHZ的自动跟踪90度相位移相器

频率范围为1KHZ~100KHZ的自动跟踪90度相位移相
器
电路的功能
移相电路的种类很多,在低频范围内,可使用由OP放大器和电容、电阻(CR)构成的移相器。
为了移相90度,必须建立W=1/CR的关系,输入频率改变时,相移量也与之成比例地变化。
这种移相器只能在频率固定的条件下使用。
本电路可以自动跟踪输入频率,在一定频率范围内可获得90度的固定相移量。
若用改变量程的办法,可在更大的频率范围内使用。
电路工作原理
OP放大器A1是单纯的缓冲放大器,输入信号电平在1V以下时,A1可将其放大到数伏。
A2是由OP放大器组成的具有固定增益的移相电路,输出幅度与输入频率无关,因为它只改变相位,所以也称作全通滤波器。
要得到90度相们差,必须使RO=1/2πF.C。
本电路采用了伺服电路对RO进行控制。
在进行90度相位检测时,同步检波电路的输出EO=E.COSφ,即与输入信号振荡大小无关,只要φ=90度,输出就等于零。
同步检波电路种类很多,本电路采用了模拟乘法器ICL8013,也可用AD532 等,把移相器A2的输入和输出分别加到X和Y上。
如果输入信号的电平低,检波效率就会降低,应予注意。
积分器A4是伺服电路,加了零输入反馈。
积分输出为负电压,须用PNP晶体管TT1进行功率放大,以增强电流。
设计要点
作为可变电阻元件使用的光电耦合器,中心电阻值根据数据表取RO=10K,。
锁频环锁相环的学习总结(精品)
1.叉积自动频率跟踪环( C P AF C) 提出了改进,
2.低信噪比、多普勒频移为300k H z 、频率一次变化率为30k Hz/s 频率二次变化率为3000 Hz/s
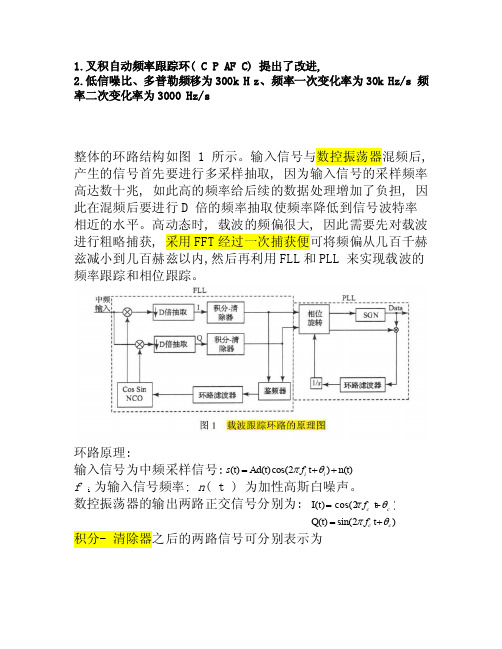
整体的环路结构如图 1 所示。
输入信号与数控振荡器混频后, 产生的信号首先要进行多采样抽取, 因为输入信号的采样频率高达数十兆, 如此高的频率给后续的数据处理增加了负担, 因此在混频后要进行D 倍的频率抽取使频率降低到信号波特率相近的水平。
高动态时, 载波的频偏很大, 因此需要先对载波进行粗略捕获, 采用FFT 经过一次捕获便可将频偏从几百千赫兹减小到几百赫兹以内,然后再利用FLL 和PLL 来实现载波的频率跟踪和相位跟踪。
环路原理:
输入信号为中频采样信号:(t)Ad(t)cos(2t )n(t)i i s f πθ=++ f i 为输入信号频率; n ( t ) 为加性高斯白噪声。
数控振荡器的输出两路正交信号分别为: I(t)cos(2t )c c f πθ=+
Q(t)sin(2t )c c f πθ=+ 积分- 清除器之后的两路信号可分别表示为
1.锁频环
F L L 通常采用自动频率跟踪环(AFC) 来实现载波频率的跟踪
常用的消除符号模糊的CPAFC方法其误差函数如下所示:
可以看出其鉴频特性当不满足条件时, 估计误差会很大, 需要经过多次调整才能使频偏减小到一个很小的值
本文提出的改进算法
计算点积和叉积之间存在如下关系
2.锁相环鉴相算法为
理论仿真。
频率跟踪算法的实施步骤

频率跟踪算法的实施步骤引言频率跟踪算法是一种用于跟踪信号中的频率变化的技术。
它在许多领域中得到广泛应用,包括无线通信、雷达系统、声音处理等。
本文将介绍频率跟踪算法的实施步骤,以帮助读者了解如何使用该算法来解决实际问题。
步骤一:获取输入信号频率跟踪算法的第一步是获取输入信号。
输入信号可以是任何连续时间的信号,例如音频信号或无线通信信号。
为了实施频率跟踪算法,我们需要将输入信号转换为数字形式,以便在计算机上进行处理。
这可以通过模数转换器(ADC)来完成。
步骤二:预处理信号在应用频率跟踪算法之前,通常需要对信号进行一些预处理。
预处理的目的是去除噪音、滤波和增强信号,以便更好地进行后续处理。
预处理的具体步骤取决于特定的应用场景和信号特性。
以下是一些可能的预处理步骤: - 去噪:使用滤波器或其他去噪技术来降低信号中的噪音水平。
- 滤波:使用数字滤波器来去除不感兴趣的频率成分,仅保留我们关心的频率范围。
- 增强:根据特定应用的要求,可能需要对信号进行增强,例如放大信号的幅度或调整动态范围。
步骤三:提取频率信息在预处理信号之后,下一步是从信号中提取频率信息。
频率跟踪算法的核心是根据信号的相位差来估计频率。
下面是一些常用的频率估计方法: - 基于相位差的频率估计算法:基于对信号相位差的测量来估计频率。
- 基于周期性特征的频率估计算法:根据信号的周期性特征来估计频率,例如自相关函数法和互相关函数法。
- 基于卷积的频率估计算法:使用卷积操作来估计频率。
选择合适的频率估计方法取决于应用的要求和信号的特性。
步骤四:跟踪频率变化频率跟踪算法的关键步骤是跟踪信号中的频率变化。
一般情况下,信号的频率是随时间变化的,因此需要使用适当的方法来跟踪频率的变化。
下面是一些常用的频率跟踪算法: - 直接频率锁定环(DLL):使用反馈控制来迫使输出信号的频率与输入信号的频率保持一致。
- 周期估计器:通过估计信号的周期性特征来跟踪频率的变化。
一种频率跟踪交流采样方法

一种频率跟踪交流采样方法引言随着电力系统的发展和智能电网的建设,对电网系统的频率稳定性和质量要求越来越高。
因此,频率监测与跟踪成为电力系统监控和调度的关键技术之一。
本文介绍了一种基于交流采样的频率跟踪方法,通过采集交流信号并进行处理,实时跟踪电力系统的频率变化,为电网运行提供了重要的指标。
方法描述该方法主要包括三个部分:交流信号采集、频率估计和频率跟踪。
具体步骤如下:1. 交流信号采集使用采样装置对电网中的交流信号进行采集。
采样装置通常由传感器、模数转换器和采集控制单元组成。
传感器负责实时采集电网中的交流信号,模数转换器将模拟信号转换为数字信号,采集控制单元对数字信号进行处理和存储。
2. 频率估计利用采集到的信号,对交流信号的周期进行估计,从而得到电网的频率。
常用的频率估计方法有周期计数法、相关法和功率谱法等。
具体选择哪种方法取决于实际应用场景和要求。
周期计数法是一种简单有效的方法,通过对采样信号的周期进行计数,得到电网的频率。
相关法是一种基于采样信号与参考信号之间的相关程度进行估计的方法,通过比较采样信号与参考信号的相位差来计算频率。
功率谱法是一种基于信号功率谱密度进行估计的方法,通过分析信号频谱特征来计算频率。
3. 频率跟踪频率跟踪是指通过不断地更新频率估计值来实现对电网频率的实时跟踪。
在实际应用中,频率可能会发生变化,因此需要实时更新估计值。
常用的频率跟踪方法有卡尔曼滤波、滤波器和锁相环等。
卡尔曼滤波是一种适用于线性系统的优秀滤波方法,可以实现对频率的精确估计。
滤波器也是一种常用的频率跟踪方法,可以实现对频率的平滑跟踪。
锁相环是一种通过不断调整相位来实现频率跟踪的方法,精度相对较低,但响应速度较快。
结论通过交流采样方法,可以实现对电力系统频率的实时跟踪。
该方法利用采样装置对电网中的交流信号进行采集,并通过频率估计和频率跟踪算法来计算和更新频率估计值。
这种方法具有实时性强、准确性高和易于实现等优点,可以有效地解决电力系统频率监测和调度的需求。
MSP430频率相位模块跟踪
第十章.频率与相位跟踪模块23456软件流程图程序启动液晶初始化定时器Timer0初始化定时器Timer1初始化定时器Timer2初始化显示输入信号的跟踪频率值系统延时结束程序终止是否程序主循环123554创建2K 大小数组存放标准的正弦表,用于后面生成一个SPWM 波形时校对其占空比值。
正弦表的最大值即为SPWM 波形的最大周期。
13Timer1的TimerA 开启捕获模式、TimerB 启动周期模式。
两者结合配置共同承担检测计算信号频率的任务。
5PWM 初始负责生成一个10KHz 的PWM 载波信号。
通过响应Timer0A 中断后调节该PWM 波形的占空比来形成一个SPWM 波。
后续电路通过运放等电路合成跟踪信号。
图x 、频率相位模块流程图初始化正弦表PWM 初始化定时器Timer0A 中断主程序定时器Timer1A 中断定时器Timer1B 中断定时器Timer2A 中断主程序中断点中断点中断点中断点中断返回中断响应中断返回中断响应中断返回中断响应中断返回中断响应图x 、频率相位模块中断响应程序创建一个信号跟踪采样频率为10KHz 的定时器中断。
每次响应中断会根据最新的频率和相位跟踪数据测算出SPWM 的占空比值,并调节PWM 输出。
24Timer2A 的TimerA 开启捕获模式来计算信号相位偏移。
计算频率计算相位差软件流程图如上图所示,频率相位的程序相对而言较为复杂。
1、 生成一个由2048点脉宽信息组成的正弦表,脉宽信息与正弦波幅值成一次函数关系。
该表用于调整输出PWM 信号的占空比值。
2、 定时器Timer0产生一个10K 频率的定时周期响应,每次响应都会调整PWM 的输出占空比值。
3、 定时器Timer1中的Timer1A 和Timer1B 同时启动,用于测量输入频率。
其中Timer1A 采用捕获模式响应输入信号的硬件中断。
Timer2B 设定为溢出计时的工作模式。
根据不同的输入频率计算输入信号的周期后换算得到信号频率;如下图所示,输入信号上升沿触发可以得到T1,T2两个中断点的定时器值。
频率跟踪及幅值相位可控的三相交流逆变电路
第4 l卷 第 7期
20 0 7年 7 月
电 力 电 子技 术
P we l cr n c o rE e to i s
Vol - 41.No. 7
Jl 20 uy,0 7
频率跟踪及幅值相位可控的三相交流逆变电路
孟光伟 ,李槐树 , 琼荟 姚
Whl otu  ̄ q ec ai pt eun yo tu o aecudb d s dbsdo WM cnrladiw s o i up t eun yt c gi u  ̄ qe c ,up t l g o l eaj t ae nP ot ,n a m- e r n n vt ue o t c
f r b e t c u r h s g e er rb t e n u o tg n u ot g y c a gn p tc n r l ot g . o a l a q ie p a e a l l ewe n i p t l e a d o tv l eb h t o n o v a a n i g i u o to l e n v a
A r u to r e p a eAC n e tr wih t eS n h o o sF e u n y a d Cic i fTh e - h s I v re t h y c r n u r q e c n t eAb l y o c m m o a i g P a eAn l r ra d Vot g h i t fAc o i d t h s ge Er o n l e n a
的 工作 方 式灵 活 , 率 范 围 宽 , 频 精度 很高 , 并且 可 与
Ke wo d :n e e ;d gtlc n r l n el e tp we d l y r s i v r r i i o to /it l g n o r t a i mo u e
gnss接收机
GNSS接收机什么是GNSS接收机GNSS(全球导航卫星系统)接收机是一种能够接收和解码卫星导航信号的设备。
GNSS系统包括GPS(全球定位系统)、GLONASS(俄罗斯全球导航卫星系统)、Galileo(欧洲全球导航卫星系统)和其他一些区域性卫星导航系统。
GNSS接收机能够通过接收卫星发出的信号,计算出自身的位置、速度和时间等信息。
GNSS接收机的工作原理GNSS接收机的工作原理主要包括四个步骤:接收、跟踪、解码和处理。
1.接收:接收机通过天线接收卫星发出的微弱无线电信号。
接收机的天线应该放置在开阔的空旷地带,以确保接收到尽可能多的卫星信号。
2.跟踪:接收机会对接收到的信号进行频率和相位的跟踪。
频率跟踪是指接收机根据接收到的信号的频率变化来估计接收机和卫星之间的相对速度;相位跟踪是指接收机根据接收到的信号的相位变化来估计接收机和卫星之间的距离。
3.解码:跟踪后,接收机会对信号进行解码,提取出包含在信号中的导航信息。
解码后的信息包括卫星的位置、时间和导航消息等。
4.处理:接收机将解码后的信号进行处理,计算出自身的位置、速度和时间等信息。
处理后的信息可以通过接口输出,供其他设备或应用程序使用。
GNSS接收机的应用GNSS接收机在现代导航和定位应用中发挥着重要的作用。
以下是一些常见的应用领域:1. 交通导航GNSS接收机被广泛应用于交通导航系统中。
通过将GNSS接收机与地图数据结合,可以准确地确定车辆的位置,并提供具体的导航指引。
2. 海洋测量和勘探海洋测量和勘探需要对海洋中的船只和设备进行定位。
GNSS接收机的高精度定位能力,使得海洋测量和勘探工作更加高效准确。
3. 农业和精准农业在农业领域,GNSS接收机被用于确定农田的边界、做图和土壤含水量等信息。
通过精确的定位数据,农民可以更有效地管理土地和作物,提高农业生产效率。
4. 精密工程测量与建筑在建筑和工程领域,GNSS接收机被用于土地测量、建筑物的布局和监测等任务。
卫星通信系统中的自适应波束成形与信号跟踪算法分析
卫星通信系统中的自适应波束成形与信号跟踪算法分析摘要:本论文深入研究了卫星通信系统的关键技术,包括自适应波束成形和信号跟踪算法。
首先,我们介绍了卫星通信系统的基本原理、应用领域和技术挑战。
然后,详细讨论了自适应波束成形技术的原理和应用,以及信号跟踪算法的种类、应用和性能评估方法。
最后,总结了这些关键技术在卫星通信中的重要性,强调了它们在满足不断增长的通信需求和应对技术挑战方面的关键作用。
关键词:卫星通信系统;自适应波束成形;信号跟踪算法;性能评估;通信技术一、卫星通信系统概述卫星通信系统是全球通信的关键工具,由地面站、卫星和用户终端三个核心要素构建。
地面站负责与用户终端通信,将数据传输至卫星。
卫星充当信号中继器,接收地面站信号并转发至目标用户终端。
此过程包括频率选择、调制解调和误码纠正等技术步骤,确保信号可靠传输。
卫星通信系统核心原理是通过空间传输实现全球通信连接,克服了地面通信的地理局限。
卫星通信应用广泛,包括远程通信、广播、电视传输、应急通信、军事和科学研究。
然而,面临信号传输延迟、频谱拥塞、大气干扰和通信安全性等技术挑战。
解决这些挑战需要持续研究和技术创新,以满足不断增长的通信需求,确保可靠性和安全性。
二、自适应波束成形技术(一)自适应波束成形的基本原理自适应波束成形技术利用阵列天线系统,包括多个天线元素,实现了信号的精确控制。
其基本原理是通过不断调整每个天线元素的信号振幅和相位,以精确定向所需的信号波束方向。
这一过程涉及反馈机制,如最小均方误差(MSE)准则或逆波束方法,用于自动优化天线元素的参数设置。
自适应波束成形的主要目标是最大程度提高接收信号的性能,同时最小化对系统的干扰和噪声的影响。
这项技术的关键优势在于它可以适应复杂的通信环境,提高信号质量,并增加通信系统的稳定性和可靠性。
因此,自适应波束成形在卫星通信和无线通信等领域具有广泛的应用前景。
(二)自适应波束成形在卫星通信中的应用自适应波束成形在卫星通信中具有广泛的应用,其中一些主要领域包括:(1)抗干扰能力提升。
频率跟踪
1 测量电网频率的一般方法
1.1 硬件测频法
硬件测频法采用过零比较器、方波形成电路及捕获口模块实现,主要步骤如下:(1)将电网电压正弦波通过过零比较器进行过零比较,比较器输出信号为方波信号,如图1所示(上图为电网电压波形,下图为过零比较器输出波形)。当电网电压处于正半波时,比较器输出高电平,当电网电压处于负半波时,比较器输出低电平。(2)将方波信号送至处理器的脉冲捕获模块,其脉冲触发中断可设置为上升沿触发、下降沿触发、上下2个边沿触发。一般脉冲触发中断可以设置跟随定时器,当进入中断后,脉冲捕获模块自动装载指定的定时器数值到相应的影子寄存器。当采用上升沿或下降沿触发模式时,该定时器值就是电网电压正弦波的周期值,用1s除以该值即可计算出电网频率。
1.2 软件测频法
常见的软件测频法有基于电压过零点的算法、基于线性插值的CROSS算法[1]、最小二乘算法、卡尔曼滤波算法、傅里叶算法[2]、三点测频法[3-5]等。不同算法各有优缺点,如三点测频法利用3个连续的采样点计算电网频率,采样点少,计算量不是很大,理论上可行,但笔者将其应用到具体的继电保护装置中,却发现其计算结果与实际值偏差太大。在工频50Hz电压下,采用三点测频法计算出的电网频率还不到30Hz。这是因为实际的继电保护装置的采样值都是离散量,采样器的位数不够高,而实际信号为连续信号,所以测量误差较大。其它算法存在计算量大、软件开销大、占有资源多、要求采样点数据窗较长等缺点,限制了这些算法的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
VCC
DVDD AVDD V2 GND VU GND
U1
ADE7753
1 2 3 4 5 6 7 8 9 10
/RESET DIN
DVDD DOUT
AVDD SCLK
V1P
/CS
V1N CLKOUT
V2N CLKIN
V2P
/IRQ
AGND /SAG
REF
ZX
DGND
CF
20 19 18 17 16 15 14 13 12 11
P3.7 P3.6 P1.4 P1.1 CLKIN1 CLKOUT1
fh2
VCC
R04 10K
T2
S1
Q03 9011
20mA 50
图 2 电压采样电路
+
V1
OP07 -
10mA 50
图 3 一次电流采样电路
+
V2
OP07 -
图 4 二次电流采样电路
采用电阻分压方式取样电压信号,电阻采用色环一致的金属 膜电阻,以保证温度变化时电压信号不变;调整电位器大小,在 波形不失真情况下,使后级电能计量芯片 ADE7753 输出电压信 号有效值约为 220.00V。
The design of On-site Calibrator for integrated error of Low-voltage measurement device
Haihong Xiao
Department of Electrical engineering &Information Henan Institute of Engineering Zhengzhou ,China Mail:xhf1487@
Kefu Wang
Department of Electrical engineering &Information Henan Institute of Engineering Zhengzhou ,China Mail:wangkefu2000@
Abstract-Energy measurement is an important basis to evaluate Energy utilization and Energy saving effect, but the accuracy of the measurement device affect to the equity. The previous on-site calibrator of low-voltage measurement device is complex to operation, not convenient to carry and has brought great inconvenience, so developing a new generation low-voltage power measurement device field calibrator is inevitable. In this paper, the proposed method of field calibrator is given based on relevant literature and data. Given the field calibrator’s software design, hardware design and given the hardware and software flow diagram Fig. This site calibrator design is emerging, and it is effective.
(4)
T
角差为:
δϕ = 180° −ϕ
(5)
E 软件设计
本系统软件程序流程图如图 8:
单片机上电对系统进行包括对两个 ADE7753、单片机 I/O 然后进入默认功能工作过程中。在每个功能模块,判断是否有按 键按下。单片机对按键的读取,采用定时中断扫描方式,有按键 时,置有按键按下标志并读取键值。
致谢
本课题是郑州华特测控新技术有限公司公司、河南工程学院 共同完成的,在此对合作者表示感谢。
REFERENCES
[1] Heng Jiang etc.,Bit scaler balancing test system implementation phase measurement,Applied Optics,Vol 1 2008. (In Chinese).
二次、一次电流互感器输出电流信号不同,取样电阻采用相
同的 50 Ω 电位器,调整电位器位置,分别使各自后级 ADE7753
输出的电流值为 5.000A 及 5000.0A。 在以上电路中采用电压跟随器的目的,是为了增加后级电路
的输入阻抗,以使测量信号不受影响。
B 电能计量电路及误差计算
电能计量包括一次电能计量和二次电能计量电路,两个电路 相同。电压、电流信号交换相接,是因为 ADE7753 在电压信号 过零时产生一个 ZX 端的电平变换,反接以后,两个 ADE77753 的 ZX 端的电平变换,正好用来检测两个电流的相位。电路图如 图 5 所示:
按键电路用以输入被检装置的电能表常数以及仪表功能控 制。数据指示采用液晶显示。
测量的数据,在需要的时候可以存 U 盘,以供参考或存计算 机。
Ⅲ.系统硬件电路设计及软件主流程图
为了实现低压计量装置现场校验仪各项功能要求,设计出了 各相应硬件电路并给出系统软件主程序流程图。以下将主要电路 和主程序流程加以简单介绍。
当按键为测量功能时,进行相应的开关控制,并计算所需电 参数;当按键为通信功能时,则行数据的传送;为参数设置功 能时,则将校验所需要的电表常数、校验参数、变比送入单片机 系统。
IV.结束语 低压计量装置综合误差是用电部门十分关心的问题计量装置 的准确与否关系到国家、集体和个人三方面的利益;本文给出了 低压电能计量装置现场综合误差校验仪的设计原理、软件流程。 低压计量装置现场校验仪的设计,减轻了工作人员的劳动强度, 提高了工作效率,具有良好市场。
Keywords-Low–voltage measurement device, On-site calibration , Integrated error, Design
Ⅰ.引言
提高能源利用效率、应用节能新技术是发展低碳经济的重要 技术手段。这些技术的节能效果需要通过计量手段进行评价和测 试,从而为能源利用状况、能源新技术推广提供科学、准确的量 化结果,引导企业加强计量数据统计分析,促进节能管理、提升 节能效果。低压计量装置的计量准确度关系到计量结果的真实情 况,而传统的低压计量装置的校验是分别对互感器和电能表进行 校验,不能正确反映计量装置的综合误差,工作强度较大,存在 一定缺点。因此设计计量装置综合误差校验仪成为必然,综合误 差现场校验仪可以在线测量电能表误差、计量装置综合误差、互
fh2
电按
显示电按
存储电按
按键电按
图 1 低压计量装置综合误差现场校验仪总体框图 电流互感器的一次侧电流,采用小电流钳形互感器取样电能表接 入的电流。
电压以及一次、二次电流分别送给两个电能计量芯片 ADE7753 , 分 别 得 到 所 检 测 的 一 次 、 二 次 侧 的 电 能 、 功 率 及 电 压、电流、频率、功率因数。ADE7753 输出的与电能成正比的高 频脉冲作为校验表计的标准脉冲(将 ADE7753 作为标准表);在 额定输入电压、电流,并且功率因数为 1 的情况下,fh1,fh2 均 为 5.5KHz。
相位测量电路用以测量一次、二次电流之间的功率因数,从 而得到一次、二次电流之间的夹角,求得计量装置所用互感器的 角差;ADE7753 的电流之比,作为计量装置电流互感器的变比。
作为计量装置的综合误差校验仪,存在检测准确度的问题, 也需要被技术监督部门检验,低频输出电路输出的频率作为用以 被检的信号。
ZX1 74LS A 74
ZX2 74LS B 74
74LS C 86
74HC T1
4053
图 7 相位测量电路
对两个 ADE7753 输出的两路方波信号进行二分频后进行异
或,得到两路信号的相位信号,单片机获取计数值 t1 。开关接通
周期信号单片机获取计算值 T,则两个电流信号的相位为:
ϕ = t1 × 360
ADE7753 可连接各种电流传感器,包括低阻抗分流电阻器 和电流互感器。此外,一个内置数字积分器可直接连接电流传感 器。这种直接连接无需外部模拟积分器,并且这种解决方案提供 了优良的长期稳定性以及电流和电压通道之间的精密相位匹配。
DGND
C19 1uf
AGND
图 5 二次电能计量芯片及外围电路 电能表误差为:
U、A:标准表一次额定电压、额定电流
fh1 :一次电能高频脉冲频率
fh2 :二次电能高频脉冲频率
f x :电能表转 n 转单片机累计脉冲数
K SI :互感器变比标称值。
C 分频电路及电表常数计算
根据相关标准要求,电能计量产品需要给出与电能成正比的 高频、低频输出。本系统在有高频输出同时,对高频做了 10000 分频电路,采用两片 CD4518 级联达到 10000 分频,原理图如图 6:
使之输出高频额定高频 ( fh1, fh2 )为 5K,经 10000 分频得
到的低频频率为 0.5Hz,则本仪表的电表常数为:
C = 3600×1000× 0.5 = 1800
(3)
200× 5
●D 相位测量电路设计及角差计算
采用脉冲填充计数法测量一次、二次电流相位从而得到互感
器角差。原理图如图 7:
感器比差、互感器角差,提高工作效率,降低劳动强度。 Ⅱ.计量装置的现场校验仪系统组成与工作原理
A. 系统组成及工作原理
仪器电路包括电压取样电路、一次电流取样电路、二次电压 取样电路、一次与二次电流相位测量电路、两个分别测量一次、 二次电能电路、按键电路、显示电路、存储电路、校验脉冲输出 电路和单片机最小系统电路总体框图如图 1 所示: