MATLAB7.0使用详解-第9章 SIMULINK交互式仿真集成环境
SIMULINK仿真集成环境

实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
③如图A4 所示,用信号线连接模块。
(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
SIMULINK交互式仿真集成环境

SIMULINK交互式仿真集成环境简介SIMULINK是由MathWorks公司开发的一种基于模型的设计工具,被广泛用于工程中的仿真、建模和分析等方面。
本文将介绍SIMULINK交互式仿真集成环境的特点、功能和应用。
特点1. 图形化界面SIMULINK提供了直观的图形化界面,使用户可以轻松地建立模型、连接组件和设定参数。
2. 交互式仿真SIMULINK支持实时交互仿真,用户可以在模型运行的过程中观察结果并动态调整参数,使仿真更加灵活和实时。
3. 多种模块库SIMULINK包含了丰富的模块库,涵盖了各种工程领域的模型组件,用户可以快速搭建复杂模型并进行仿真分析。
4. 支持代码自动生成SIMULINK可以根据建立的模型自动生成对应的代码,方便用户将仿真结果应用到实际工程项目中。
功能1. 系统建模用户可以通过拖拽模块、线连接和参数设置,建立系统的数学模型。
2. 仿真分析SIMULINK提供了丰富的仿真分析工具,用户可以对模型进行动态仿真、频域分析、优化等操作。
3. 控制设计SIMULINK集成了控制系统设计工具,用户可以设计并优化闭环控制系统。
4. 协同工作多人可以同时使用SIMULINK进行协同工作,通过云存储共享和编辑模型。
应用领域1. 汽车行业SIMULINK在汽车行业中被广泛应用,包括引擎控制、车速控制、底盘控制等方面。
2. 电力系统电力系统的稳定性和控制可以通过SIMULINK进行建模和仿真分析。
3. 机器人控制机器人的运动规划、路径规划和控制系统设计都可以通过SIMULINK来实现。
总结SIMULINK作为一款强大的交互式仿真集成环境,为工程师和科研人员提供了一个方便、直观、灵活的建模和仿真平台。
通过本文的介绍,读者可以更加深入了解SIMULINK的特点、功能和应用领域,从而更好地利用这一工具进行工程设计和研究工作。
MATLAB使用详解SIMULINK高级仿真技术

10.2.1 Parameters标签页
• 子系统封装的目的之一就是提供一个友好的参数设置界面。 用户无需了解子系统内部结构,只需输入参数就可以对系 统进行设计和仿真。只有使用了子系统编辑器中的 Parameters标签页进行了参数设置,才算是真正意义上的 完成可封装,从而使得封装之后,双击模块能够出现与 SIMULINK模块库中模块一样的参数设置界面。
数环问难。 • 对代数环采取代数约束。 • 切断模型中的代数环。
10.7 S-函数(系统函数)的创建和使用
• SIMULINK为用户提供了许多内置模块库,诸如连 续模块库(Continous)、离散系统模块库 (Discontinous)等,用户通过使用这些系统提 供的模块即可构建模型。但在实际问题中,很多 情况下,这些系统模型对于构建模型显得很有限, 这时就需要一些特殊的模块,他们由基本模块构 成,是调试
• 如同诸多系统设置平台一样,SIMULINK也具有界 面友好、功能强大的调试功能。SIMULINK提供了 一个图形化的调试界面,简化了调试操作。 simulink调试器是一个定位和诊断模型错误的工 具.通过SIMULINK调试工具,用户可以采用多种 方式对模型进行调试,发现其中可能存在的问题 并加以修改,从而使得用户的模型设计、仿真、 分析更加快速、便捷。
10.5.2 线性化的方法
• 有这样一种通用的解决问题的办法,那就是复杂 问题简单化,未知问题已知化。非线性问题也是 如此,常用的方法是通过一定的方式将其线性化, 得到线性化模型之后,就利用成熟的线性分析方 法来研究非线性问题。
MATLAB基础-simulink交互式仿真集成环境PPT课件
Simulink
1.2 建立Simulink仿真模型
a) 选取模块或模块组
b) 模块拷贝及删除 在模块库中选中模块后,按 住鼠标左键不放并移动鼠标 至目标模型窗口指定位置, 释放鼠标即完成模块拷贝。 模块的删除只需选定删除的 模块,按Del键即可。
MATLAB与通信仿真
Simulink
• 变换模块名的显示位置:Format 菜单中的Flip name可将模 块名换到对称的位置,Hide name可将模块名隐藏起来。
MATLAB与通信仿真
Simulink
1 Simulink 基本操作
1.3 系统仿真运行 1. Simulink模型窗口下仿真 步骤 ① 打开Simulink仿真模型窗口,或打开指定的.mdl文件; ② 设置仿真参数:在模型窗口选取菜单【Simulation: Parameters】, 弹出 “Configration Parameters” 对话框,设置仿真参数,然后 按【OK】即可;
MATLAB与通信仿真
Simulink
使用Simulink仿真的步骤:
• 建构正确的系统模型。 • 利用仿真工具去分析模型。 • 判断仿真输出结果,并修正模型。 • 重复上述过程,以实现系统的最优化。
模型 建模
+
模型
-
分析
显示
修正
MATLAB与通信仿真
Simulink
本部分主要内容如下: 1 Simulink基本操作 2 模块库和系统仿真 3 子系统创建与封装 4 Simulink仿真举例
➢ 常用的子模块库有Sources (信号源),Sink(显示输出), Continuous( 线 性 连 续 系 统 ) , Discrete(线性离散系统), Function & Table(函数与 表 格 ) , Math( 数 学 运 算 ) , Discontinuities (非线性) 等。
MATLAB7.0使用详解-第9章 SIMULINK交互式仿真集成环境
9.5.2 模型的仿真过程
SIMULINK的仿真就是在用户指定的时间段内按照模型提供的初始条件,按 照一定的流程计算系统的状态变化和输出的过程。包括两个执行阶段:初 始化阶段和动态计算阶段。 1.初始化 模型仿真在初始化阶段主要需要完成以下工作。 (1)确定模块计算的实际参数,主要通过评估模型参数得到。 (2)展开模型的继承关系。每个子系统用其所包含的模块代替。 (3)确立模块运行的次序。 (4)确定模型中非显式设置信号的属性,如名称、数据类型等。并检查 每个模块是否能够接收到连接它们输入端的信号。 (5)确定模块的采样时间。 (6)分配和初始化存储每个模块状态值和输出当前值的存储空间。 2.动态计算阶段 一般的仿真模型都是通过数值积分来计算的。在仿真的时间段里, SIMULINK在每一个时间间隔点都是按顺序计算系统状态和输出值的,这些 计算状态和输出的时间点成为时间步长,相邻两个时间点间的长度称为步 长,步长的大小取决于求解器的类型。在每个时间步长里,SIMULINK计算 系统输入、状态和输出,并更新模型来反映计算出的值。
第9章 SIMULINK交互式仿真集成环境
SIMULINK是基于MATLAB的图形化仿真设计环境,是MATLAB 提供的进行动态系统建模、仿真和综合分析的集成软件包。 在SIMULINK环境中,用户可以脱开理论阐述必须进行理想 化假设的无奈,实时了解一些自然因素(如摩擦、风阻等) 以及其他一些随机因素对系统行为的影响。 SIMULINK可以处理的系统包括:线性、非线性系统;离散、 连续及混合系统;单任务、多任务离散事件系统等。 SIMULINK和MATLAB是高度集中在一起的,因此,它们之间 可以进行灵活的交互操作。在MATLAB7.x的版本中,由于有 许多可供直接使用的工具箱和模块,因此它在航天、通信、 控制、信号处理、电力系统等诸多领域都有广泛的用途。
MATLABSIMULINK的操作指导
MATLAB/SIMULINK的操作指导一SIMULINK简介Simulink是MATLAB下的一个软件包,是一个结合了框图界面和交互仿真能力的系统级设计和仿真工具。
它以MATLAB的核心数学、图形和语言为基础,可以让用户毫不费力地完成从算法开发、仿真或者模型验证的全过程,而不需要传递数据、重写代码或改变软件环境。
Simulink是基于MATLAB的图形化仿真环境。
它使用图形化的系统模块对动态系统进行描述,并在此基础上进行动态系统的求解。
利用Simulink对动态系统进行仿真的核心在于,MATLAB计算引擎对系统微分方程核差分方程求解。
Simulink与MATLAB时高度集成在一起的,因此,Simulink与MATLAB之间可以灵活的交互操作。
1 Simulink的窗体介绍由于Simulink是基于MATLAB环境之上的高性能的系统及仿真平台。
因此,启动Simulink 之前必须首先运行MATLAB,然后,才能启动Simulink并建立系统的仿真模型。
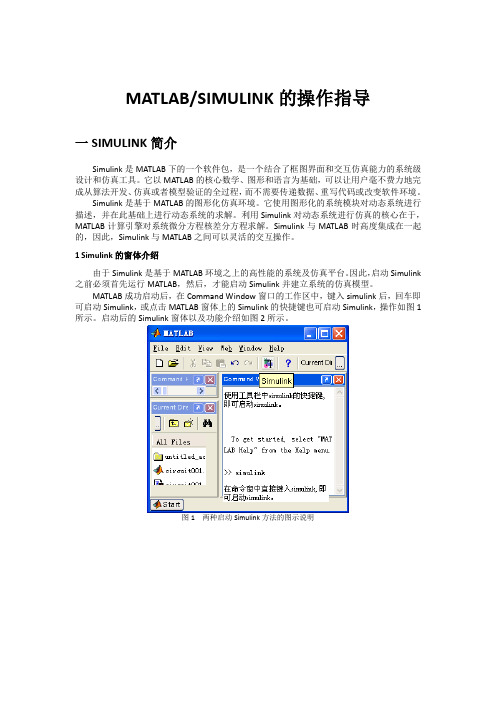
MATLAB成功启动后,在Command Window窗口的工作区中,键入simulink后,回车即可启动Simulink,或点击MATLAB窗体上的Simulink的快捷键也可启动Simulink,操作如图1所示。
启动后的Simulink窗体以及功能介绍如图2所示。
图1 两种启动Simulink方法的图示说明图.2 Simulink库浏览器窗口2 一个MATLAB/Simulink库自代的演示实例MATLAB/Simulink自代了大量的演示实例,为读者创建模型提供许多有益的帮助,读者可借鉴这些实例。
浏览演示实例可在Command Window窗的工作区键入demo回车即可,或点击MATLAB窗体的左下角的Start按钮也可浏览,选择出所需的模型。
线性电路的暂态分析模型如图3所示,其运行结果如图.4所示。
图 3 线性电路暂态分析的演示仿真模型图.4 线性电路暂态分析的演示仿真模型的运行结果3 创建一个MATLAB实例对Simulink库有了初步了解后,创建一个简单电路的仿真模型并运行。
7.SIMULINK交互式仿真集成环境
开启空白(新建)模型窗 从模块库复制所需模块到空白(新建)模型窗 连接信号线 根据理论数学模型设置模块参数
增益模块参数设置 求和模块参数设置:+改为积分模块参数设置:x(0)=0.05m 仿真参数设置:采用默认参数
保存模型文件
引出示波器窗口,运行仿真模型
参数设置
练习1
实验内容1 搭建观察使用示波器观察正弦波信号 的基本仿真模型,其中正弦波频率为 100rad/s,幅度为-2V~2V。
SIMULINK模型窗的组成
工具条
仿真的启动或继续按钮 暂停按钮 结束仿真按钮 打开模块库浏览器按钮
状态栏 菜单栏
模型概念和文件操作
SIMULINK模型是什么
信源 系统 信宿
信源:可以是常数、正弦波、阶梯波等信号源 信宿:可以是示波器、图形记录仪等 系统:被研究系统的SIMULINK方框图 系统、信源、信宿,可以从SIMULINK模块库 中直接获得,也可以根据用户意愿用库中的模 块构搭而成 对于具体的SIMULINK而言,不一定完全包含 这三大组件
在视觉上:直观的方框图 在文件上:扩展名为MDL的ASCII代码 在数学上:体现了一组微分方程或差分方程 在行为上:模拟了物理器件的构成的实际系 统的动态性状
SIMULINK模型的3种宏观组件:信源 (Source)、系统(System)、信宿(Sink)
模型概念和文件操作
SIMULINK模型的一般结构
基本组件模块组在Simulink一项下,其余均为专门 工具包 Simulink基本组件模块组下包括各类基本组件子模 块库,每类基本组件子模块库包含了许多基本组件
simulinkmatlab仿真环境教程(精)
simulink matlab仿真环境教程Simulink是面向框图的仿真软件。
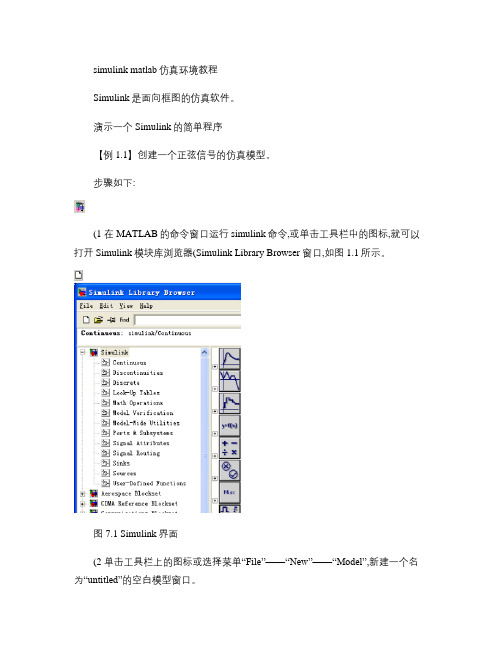
演示一个Simulink的简单程序【例1.1】创建一个正弦信号的仿真模型。
步骤如下:(1 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser 窗口,如图1.1所示。
图7.1 Simulink界面(2 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source,或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号,将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器拖放到“untitled”窗口中。
(6 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
9.7 设置仿真参数
当选中模型窗口菜单栏的Simulation/Start时, SINMULINK就开始用一种数值解算法方法去求解一 组微分或差分方程。读者为了得到正确的、想要 的仿真结果,必须对各种仿真参数进行设置。其 中包括系统模块参数设置、示波器参数设置、仿 真起始和终止时刻的确定、仿真步长的选择、数 值积分算法的选择、是否从外界获取数据、是否 向外界输出数据等。
9.4.2 专业模型库
除了前面介绍的SIMULINK公共模块库之外,SIMULINK还包含了许 多面向不同专业的模块集,以便从事其他领域的设计人员快速建 模。在这里就不再一一介绍其功能了,如果读者想进一步了解相 关内容可以参考SIMULINK的Help文件。具体操作如下,先打开 SIMULINK库浏览器窗口,在菜单栏中选择Help/Simulink help命 令,这时就会弹出Help帮助界面,如图所示。
9.5.2 模型的仿真过程
SIMULINK的仿真就是在用户指定的时间段内按照模型提供的初始条件,按 照一定的流程计算系统的状态变化和输出的过程。包括两个执行阶段:初 始化阶段和动态计算阶段。 1.初始化 模型仿真在初始化阶段主要需要完成以下工作。 (1)确定模块计算的实际参数,主要通过评估模型参数得到。 (2)展开模型的继承关系。每个子系统用其所包含的模块代替。 (3)确立模块运行的次序。 (4)确定模型中非显式设置信号的属性,如名称、数据类型等。并检查 每个模块是否能够接收到连接它们输入端的信号。 (5)确定模块的采样时间。 (6)分配和初始化存储每个模块状态值和输出当前值的存储空间。 2.动态计算阶段 一般的仿真模型都是通过数值积分来计算的。在仿真的时间段里, SIMULINK在每一个时间间隔点都是按顺序计算系统状态和输出值的,这些 计算状态和输出的时间点成为时间步长,相邻两个时间点间的长度称为步 长,步长的大小取决于求解器的类型。在每个时间步长里,SIMULINK计算 系统输入、状态和输出,并更新模型来反映计算出的值。
9.5 了解SIMULINK的工作机理
SMULINK通过其基于Windows的模型化图形设计, 屏蔽了许多繁琐的编程,大大简化了我们对实际 问题模型化的过程。但若想更加灵活地使用 SIMULINK,就必须了解其工作机理。简单来说, SIMULINK建模大体分为两步,一是通过模块组合 的方法创建模型,二是对创建的模型进行仿真。 下面就来介绍模型的基本结构和其仿真过程。
9.3 SIMULINK的工作环境
在SIMULINK中启动了两个基本的窗口,即库浏览 器窗口和模型窗口,下面将对这两个窗口的主界 面进行重点介绍,以便读者在实际操作中熟练使 用。
9.3.1 SIMULINK库浏览器窗口
9.3.2 SIMULINK模型窗口
SIMULINK模型窗口,如图所示。它是建模的基本窗口,下 面将就其菜单栏、工具栏和状态栏作详细介绍。 菜单栏:各菜单中选项名称及功能依次介绍如下。
1.File菜单 2.Edit菜单 3.View菜单 4.Simulation菜单 5.Format菜单 6.Tools菜单 7.Help菜单
9.4 SIMULINK的模块库
模块库是SIMULINK的一个重要概念。在SIMULINK 的模块库中,可大体分为两类,一类是SIMULINK 的公共模型库(如图所示),一类是SIMULINK的 专业模型库(如图所示)。
9.6.2 对模块的操作
假设读者想把正弦信号放大3倍,并与脉冲信号一起合成为 向量信号,再将合成的向量信号分解为标量信号,将所有 的信号改变通过示波器显示出来。下面将结合对模块操作 的讲解,边讲解边建立模型,以下将该模型称为untitled*。 1.模块的选择 2.模块的选定 3.模块的复制 4.模块的连接 5.模块的插入 6.模块的移动 7.模块的删除 8.模块的旋转 9.模块名的操作 10.模块的阴影效果 11.模块颜色的改变 12.模块大小的改变
9.7.1 系统模块参数设置
系统模块只有在参数设置后才能满足用户要求和仿真要求。不同的模块具 有不同的参数设置,用鼠标左键双击模块就可以弹出模块设置对话框,图 9.42就是增益模块的对话框。 参数设置对话框由功能说明框和参数设置框组成。功能说明框用来说明模 块的使用方法和主要功能;参数设置框用来设置模块的参数。例如,在增 益模块参数设置框中,有“主要”、“信号类型”、“参数数据类型”3 个选项卡。每个选项卡下面都有4个按钮:OK(确定)、Cancel(取消)、 Help(帮助)、Apply(应用),在输入相应的参数后,使用这4个按钮可 以进行相应的操作。图显示了untitled*模型中增益模块的增益系数设置 为3。
9.4.1 公共模型库
1.Commonly Used Blocks(常用模型库) 2.Continuous(连续系统模型库) 在SIMULINK公共模型库中单击Continuous,看到如图9.13所示的连续 模块。 3.Discontinuities(非连续系统模型库) 4.Discrete(离散模块) 5.Logic and Bit Operation(逻辑和位操作模块) 6.Lookup Table(查表库) 7.Math Operations(数学运算库) 8.Model Verification(模型验证库) 9.Model-Wide Utilities(关于模型的实用模型库) 10.Ports&Subsystems(端口和子系统模块库) 11.Signal Attributes(信号属性模块库) 12.Signal Routing(信号通路模块库) 13.Sinks(信号输出模块库) 14.Sources(信号源模块库) 15.User-Defined Functions(用户自定义函数模块库)
9.6 SIMULINK模型的构建
在前面的小节中,对于SIMULINK的工作环境以及 工作机理进行了简要介绍。在这一节中,将重点 介绍如何在SIMULINK模型窗口中建立一个直观的 模型,以及如何对模型文件、模块、信号线等进 行相关的操作。
9.6.1 对模型文件的操作
对模型文件的操作主要有4个:新建、打开、存盘和打印。 (1)新建模型。新建模型可以打开一个名为untitled的模型窗口。有两 种方法可以完成上面的动作。 (2)打开模型。打开已经存在的模型有以下3种方法。 (3)对模型存盘。SMULINK模型的存储形式是.mdl文件,称为模型文件。 其保存方式与Windows操作完全相同,方法有3种。 (4)打印模型。单击模型窗口中的图标或选择菜单栏的File/Print,弹 出打印对话框,出现一个如图所示的选项框,通过点选上面的复选框,可 以打印以下相关内容:当前系统(Current system)、当前系统及其上层 (Current system and above)、当前系统及其下层(Current system and below)、整个系统(All systems)。
9.1 安装SIMULINK软件包
SIMULINK是MATLAB的一个工具箱软件包,在 MATLAB的典型安装类型中是默认安装SIMULINK软 件包的。而在的MATLAB的自定义安装类型中, SIMULINK软件包是否安装要看在安装MATLAB过程 中,是否勾选了SIMULINK复选框,如图所示。
第9章 SIMULINK交互式仿真集成环境
SIMULINK是基于MATLAB的图形化仿真设计环境,是MATLAB 提供的进行动态系统建模、仿真和综合分析的集成软件包。 在SIMULINK环境中,用户可以脱开理论阐述必须进行理想 化假设的无奈,实时了解一些自然因素(如摩擦、风阻等) 以及其他一些随机因素对系统行为的影响。 SIMULINK可以处理的系统包括:线性、非线性系统;离散、 连续及混合系统;单任务、多任务离散事件系统等。 SIMULINK和MATLAB是高度集中在一起的,因此,它们之间 可以进行灵活的交互操作。在MATLAB7.x的版本中,由于有 许多可供直接使用的工具箱和模块,因此它在航天、通信、 控制、信号处理、电力系统等诸多领域都有广泛的用途。
9.6.4 对模型的注释
为了更好地理解模型,读者可以在模型窗中书写 注释。 模型注释的创建:在需要创建注释的区域双击鼠 标左键,出现编辑框后,只需在其中键入需要注 释的内容,然后将鼠标移出编辑框外单击即可。 移动注释位置:在模型注释上单击鼠标左键的同 时拖动鼠标到合适的位置即可。 注释文字的字体设置:在模型注释上单击鼠标左 键,待出现编辑框后,将其中需要更改的内容全 选,然后选择模型菜单栏Format/Font,打开字体 设置对话框,可以设置注释的字体及大小。设置 完后,将鼠标移出编辑框单击即可。图的注释就 是选择“小三”大小、Arial字体写成的。
ቤተ መጻሕፍቲ ባይዱ
9.7.2 示波器参数设置
在SIMULINK仿真中,示波器的使用是非常多的。适当的参数设置 能够给用户带来更加直观的显示结果。在示波器设置中,数据长 度的缺省设置是5000,当数据长度超出5000时,最前面的数据将 被遗弃。 1.示波器的工具条 示波器的工具条中包括以下工具按钮。 2.示波器的纵坐标设置 示波器的纵坐标设置步骤如下。 3.示波器属性对话框设置 单击示波器工具条图标,打开如图所示的示波器属性对话框。
9.7.3 仿真参数的设置
仿真参数的设置主要包括:Solver(解法器设置)、Data Import/Export(仿真参数输入输出)、Optimization(仿真优 化)、Diagnostics(仿真诊断)、Hardware Implementation (仿真硬件实现)、Model Referencing(参考模型)、Realtime workshop(实时工作间)。在模型窗口菜单栏中选择 Simulation/Configuration Parameter,就可以打开 Configuration Parameter(参数设置)对话框,如图所示。
9.8 连续系统建模实例
连续系统是指可用微分方程来描述的系统。在现 实世界中,很多物理系统都是连续时间的,连续 系统可分为:线性连续系统和非线性连续系统。 下面将主要介绍一些简单的连续数学模型的 SIMULINK模型实现,并将这些简单模型应用到相 对复杂的SIMULINK建模中。