一种大角度范围的高精度超声波测距处理方法
一种高精度超声波测距方法的研究
图 1 双比较器整形电路工作原理 Fig.1 Principle of the regularization circuit with dual comparators
在图 1 中, Vm 为峰 值电压; V1 为比 较器 1 的阀 值
电平; V2 为比较器 2 的阀值电平; t0 为回波前沿所对应
图 2 系统结构框图 Fig.2 Block diagram of system structure
2.1 超声波的发射 本 系 统 由 单 片 机 软 件 产 生 40 kHz 脉 冲 通 过
89C52 的 P1.0 口输出, 单片机输出的 TTL 脉冲通过单 管变压器耦合功率放大电路实现功率放大, 超声波发 射传感器直接接在变压器的输出端, 加在超声传感器 两端的电压信号是幅值大约 100 V, 频率为 40 kHz 的 正弦波, TCF40- 16 超声传感器在这个电压的作用下, 产生 40 kHz 的超声波. 2.2 接收电路
文献标识码:A
文章编号:1672- 910(2 2006)03- 0035- 04
超声波测距是一种非接触式检测方式, 在使用中
不受光照度、电磁场、被测物色彩等因素的影响 , 加之
信息处理简单, 速度快, 成本低, 在机器人避障和定
位、车 辆自动导航 、液 位 测 量 等 方 面 已 经 有 了 广 泛 的
盲区
/
900
914
14
200
盲区
/
1 000
1 017
17
300
307
8
1 100
1 122
22
400
406
10
1 200
1 220
20
超声波测距实验方法与精度控制
超声波测距实验方法与精度控制超声波测距是一种常见的测量距离的方法,它利用超声波在空气中传播的特性来测量目标物体与测量设备之间的距离。
在这篇文章中,我们将探讨一些常见的超声波测距实验方法以及如何控制测量的精度。
首先,让我们了解一下超声波测距的基本原理。
超声波是一种高频声波,其频率通常在20kHz至100kHz之间。
超声波在空气中传播的速度约为343米/秒,而且能够在相对较远的距离内传播。
当超声波遇到目标物体时,一部分声波会被反射回来,并被接收器接收到。
根据超声波的传播时间和传播速度,我们可以计算出目标物体与测量设备之间的距离。
一种常见的超声波测距实验方法是使用超声波传感器。
这种传感器通常由一个发射器和一个接收器组成。
发射器将超声波发送出去,然后接收器接收到反射的声波。
通过测量超声波的传播时间,我们可以计算出目标物体与传感器之间的距离。
这种方法可以广泛应用于自动测距和避障系统中。
为了保证测量的精度,我们需要注意几个因素。
首先是超声波的传播速度。
理想情况下,超声波在空气中的传播速度是恒定的,但实际上会受到温度、湿度等环境因素的影响。
在实验中,我们可以通过校准传感器来调整超声波的传播速度,以提高测量的准确性。
另一个影响测量精度的因素是信号的干扰。
超声波测距设备通常会受到外部噪声的影响,如其他电子设备的干扰或者周围环境的声波干扰。
为了减小信号干扰,我们可以使用滤波器来滤除高频或低频噪声,使得接收到的信号更加清晰。
此外,超声波测距还受到目标物体的形状和材质的影响。
不同形状和材质的物体对超声波的反射和吸收情况有所不同,这会影响测量的精度。
在实验中,我们可以通过测量不同形状和材质的物体来研究这种影响,并进行相应的修正。
在进行超声波测距实验时,我们还需要注意测量的范围。
超声波的传播距离是有限的,而且会随着距离的增加而衰减。
因此,在选择超声波测距设备时,我们需要根据实际需求确定测量范围,并选择适合的设备。
此外,为了提高测量精度,我们还可以使用多个传感器进行测量,并取其平均值来进行校正。
一种高精度超声测距方法的研究
Study of a N ew U ltrasonic Distance Measurement Methodwith High PrecisionW A N G Wensheng,Q I Guangx ue,W EN S huhui,FEN G Bo(Yanshan U niversity,Qinhuangdao Hebei066004P.R.China)Abstract: A new method for ultrasonic distance measurement based on ultrasonic circulation and multi2pulse e2 cho principle is presented in the paper.The ultrasonic distance measurement system based on the single chip mi2 crocomputer is given.This method can conquer the limitation of pulse2echo times and improve the accuracy of measurement after temperature compensation.K ey w ords: ultrasonic distance measurement;high precision;temperature compensation一种高精度超声测距方法的研究①王文生,齐广学,温淑慧,冯 波(燕山大学,河北 秦皇岛 066004)摘要:本文介绍了一种基于超声波循环反射测量原理的高精度超声测距方法,并给出了以单片机为核心的测距系统的组成.本测量法克服了多次反射法中对回波脉冲个数的限制,经温度补偿后测量精度得到了明显改善.关键词:超声测距;高精度;温度补偿中图分类号:TB559 文献标识码:A 文章编号:1004-1699(2002)03-0219-031 引 言 超声波测距是一种传统而实用的非接触测量方法,和激光、涡流和无线电测距方法相比,具有不受外界光及电磁场等因素的影响的优点,在比较恶劣的环境中也具有一定的适应能力,且结构简单,成本低,因此在工业控制、建筑测量、机器人定位等方面得到了广泛的应用[1,2].但由于超声波传播声时难于精确捕捉,温度对声速的影响等原因,使得超声波测距的精度受到了很大的影响,限制了超声测距系统在测量精度要求更高的场合下的应用,为此,本文提出一种改进后的超声反射测距方法,并设计了以单片机为核心的超声测距系统.2 超声波循环反射测量原理 脉冲反射法,又称回波法,是利用超声波在介质中传播遇到声阻抗有差异的界面时产生反射现象来工作的.根据反射次数的不同,可分为一次脉冲反射法和多次脉冲反射法.多次脉冲反射法是目前最常用的一种超声测距方法,它是指一个超声脉冲多次往返于超声探头与被测界面之间,通过检测电路得到各个超声波发射和接收的波形,再由波形整形后得到相当于超声波传播声时的方波信号[3].由此声时和超声波在已知介质中的声速便可以得出距离,超声波探头到被测物体的距离公式为:x=nc2kf r(1)2002年9月 传 感 技 术 学 报 第3期①来稿日期:2002204215其中:x ———超声波探头到被测物体的距离;c ———超声波在介质中的传播速率;k ———反射回波个数;f r ———时标(晶振);n ———测距时间内的脉冲计数值.应用多次脉冲反射法进行测量时,由于超声波能量在传播过程中逐渐损耗,所以有效回波只有四或五个.当测量的分辨率要求在微米级时,对所需时标晶振的频率要求依旧很高,且电路调试困难,但若利用第K 个回波产生一个反馈信号,再次激发超声波发射电路使之产生一个新的用于测量的脉冲,从而实现声循环,这就是声循环多次脉冲反射法测量原理,假设反馈次数为m 则式(1)表达为x =nc 2kf ′r m(2)在分辨不变的条件下,将计数频率减至原来的1/m ,从而保证了测量精度和线路的稳定性.同时也就是说在低频时标晶振下实现高的分辨率.3 测距系统组成 按照超声波循环反射测量原理设计的测距系统如图1所示,其中k =4,m =4.系统以单片机为核心,主要由超声波收发电路、循环反射电路、温度测量电路和计数电路组成,另外还附有键盘及显示部分.图1 超声测距系统构成3.1 超声收发电路本系统是选用以水为介质而设计的,且测试距离小于15cm ,采用压电陶瓷振子制作的水浸式单探头,为了提高检测精度,选用工作频率为10MHz 的超声波换能器.最初的控制信号来自单片机,发射电路由窄脉冲触发电路后接功率放大器,并采用电磁耦合方式隔离数字电路和模拟电路,以减小两者间的相互干扰.接收电路中由于接收的回波幅值很小,不能够推动后级电路工作,采用集成电路U PC1018C 对回波信号进行放大,可以得到令人满意的4个回波.同时也必须在它和发射电路间加上电磁隔离减少干扰.3.2 循环反射电路首先,单片机给出初始脉冲经或门触发超声波发射电路,同时触发单稳触发器2,然后单稳2的反相输出给与门2用来屏蔽在发射超声的同时在接收端产生的脉冲信号,其同相输出去触发两个R 2S 触发器,此时打开与门3,关闭与门4和与门5,计数器1开始对回波脉冲进行计数,当计满3个脉冲后,计数器1触发单稳态触发器进而触发R 2S 触发器,打开与门4,使第四个回波通过,作为反馈信号经过或门再次触发超声波发射电路,从而实现了声循环反射原理的应用,计数器2用来控制循环次数,当循环四次后,通过触发R 2S 触发器来关闭与门3,打开与门5,使最后一个回波通过去触发R 2S 触发器2,其输出脉冲宽度即是总的超声波传播声时.由于超声波发射与接收之间存在电路延时,当循环次数增加时,延时是比较长的,必须在声时中除去,因此,电路中采用单稳1产生一个宽延时脉冲,用来提取发射脉冲经电路延时后在接收端产生的脉冲信号,图中R 2S 触发器1的输出脉冲宽度即为电路延时时间.3.3 温度测量和计数电路由于超声波在水中的传播速度受到水的温度和压力等因素的影响,受温度的影响尤为明显,而测距精度由超声传播时间和声速决定,所以必须对声速进行温度补偿.水中声速与温度的关系如下式:22 传 感 技 术 学 报 2002年c =1449.2+4.623t -0.054t2(3) 采用AD590作为温度传感器,其电压信号经AD 变换后给单片机,计算出实时的声速,消除温度的影响,AD590线性度良好,且是电流输出型器件,精度不随引线的长度变化.计数电路的精度主要取决于时标晶振的频率和稳定性.为了实现高精度测量,必须提高分辨率.若以声波在水中速度为1500m/s 计算,分辨率要求为1μm 时,则对时标晶振的频率要求大约为47MHz ,因此选用频率为50MHz 的恒温时标晶振,实现了对声时的高精度计数,即可以得到准确的声时.4 结 论 (1) 本文在超声波多次反射测距方法的基础上,提出声循环反射测量法,并设计了高精度测试系统,在时标晶振频率不变的情况下使分辨率提高了四倍,大大改善了测距的精度.(2) 采用AD590温度传感器设计了声速温度补偿通道,可测出实时声速并及时补偿.(3) 设计了超声发射接收延时的提取电路,改善了声时的准确性.参考文献[1] Grmmel PM.Improve ultrasonic detection using the ana 2lytic signal magitade[J ].Ultrasonic ;1981;19(2):73~76[2] 翟国富,刘茂恺.一种实时高精度的机器人有超声波测距处理方法[J ].应用声学,1990;(1):17~24[3] Marioli ,et al.Digital time 2of 2flight measurement for ul 2trasonic sensors [J ].IEEE Trans Instrument Means.1992;41(1):93~97作者简介王文生(19762),男,河北省人,燕山大学测试计量技术与仪器专业的硕士生.主要从事模式识别及光电检测方面的研究.122第3期 王文生,齐广学等:一种高精度超声测距方法的研究 。
超声波测距仪的使用技巧与数据处理方法
超声波测距仪的使用技巧与数据处理方法超声波测距仪是一种常见的测量设备,它利用声波的特性来测量距离。
在物流、建筑、机械等领域,超声波测距仪都发挥着重要的作用。
本文将介绍超声波测距仪的使用技巧以及数据处理方法。
首先,我们来了解一下超声波测距仪的原理。
超声波测距仪通过发射一束超声波,并测量它返回的时间来计算出物体与测距仪的距离。
设备内部有一个超声波发射器和接收器,发射器将超声波发送出去并记录发送的时间,接收器接收到返回的超声波并记录接收的时间,通过计算发送和接收的时间差,就可以得到距离。
在使用超声波测距仪时,首先要选择合适的工作模式。
通常有单次测量和连续测量两种模式。
单次测量模式适用于只需要单次测量的场景,比如测量固定物体的距离。
而连续测量模式则适用于需要实时监测某个物体的距离变化的场景。
其次,要注意测距仪的放置位置。
为了获得准确的测量结果,应尽量避开干扰源和反射面。
在物体背后有积水、玻璃等反射性较强的表面时,会对测距结果产生影响。
此外,还要注意避开强光照射和强电磁场等干扰源,以免影响测量的准确性。
在实际操作中,还可以采取一些技巧来提高测量的精度和稳定性。
例如,测量前可以先对超声波测距仪进行校准,以确保测量结果的准确性。
另外,还可以通过设置测量范围、灵敏度和滤波器等参数,来适应不同环境下的测量需求。
接下来,我们来讨论一下超声波测距仪数据的处理方法。
在使用过程中,可能会遇到一些异常数据或者误差。
为了得到准确的测量结果,我们需要对数据进行处理。
首先,要注意排除异常值。
异常值可能是由于环境因素或者设备故障导致的,需要通过观察数据的分布特点和变化趋势来判断。
如果发现某个数据明显偏离其他数据,可以将其排除在外,以提高测量结果的准确性。
其次,可以采用平均值滤波的方法来处理数据。
平均值滤波是一种常用的数据处理方法,通过计算一组数据的平均值来减小数据的波动。
将连续多次测量的结果取平均值,可以有效减少小范围内的误差,提高测量结果的稳定性。
一种大量程高精度激光测距仪实现方案
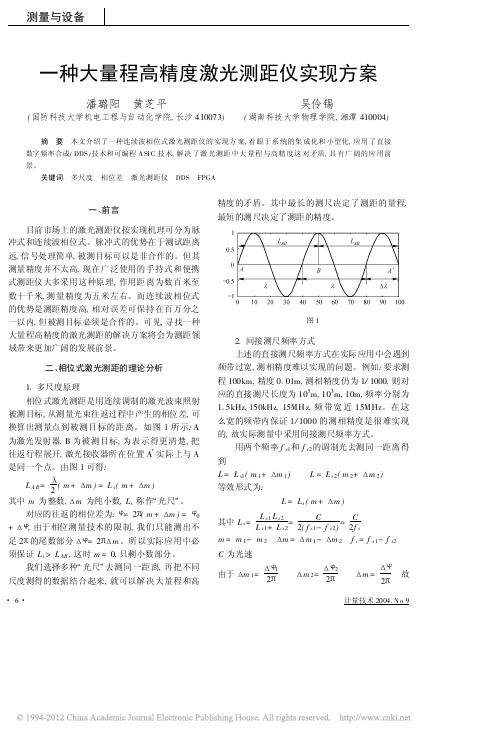
图6
21 用 FPGA 实现相位差测量 为简化相位差计电路的设计, 减小系统的体积 和功耗, 我们采用 FPGA( 现场可编程门阵列) 配合 少量地外围电路实现相位差的测量, 换算和显示功 能见图 6。 F PGA 集成了相位差测量电路中的大部分功能 单元, 而且是通过软件编程实现的, 具有很强的可移 植性和可修改性。其中的运算单元把计数值( 相位 差) 转换成被测距离, 并且可通过算法对测试环境大 气密度、温度等因素的影响进行矫正。再经过锁存
测量与设备
一种大量程高精度激光测距仪实现方案
潘璐阳 黄芝平
( 国防科技大学机电工程与自动化学院, 长沙 410073)
吴伶锡
( 湖南科技大学物理学院, 湘潭 410004)
摘 要 本文介绍了一种连续波相位式激光测距仪的 实现方 案, 着 眼于系 统的集 成化和 小型化, 应用 了直接 数字频率合成( DDS) 技术和可编程 A SI C 技术, 解决 了激 光测距 中大 量程 与高精 度这 对矛盾, 具 有广 阔的应 用前 景。
用两个频率 f s1和 f s2的调制光去测同一距离得 到
L = L s1( m 1+ $m 1) 等效形式为:
L = L s2( m 2+ $m 2)
L= Ls( m+ $m)
其中 L s=
L s1 L s2 L s1+ L s
2
=
C 2( f s1-
f s2) =
C 2f s
m = m 1- m 2 $m = $m 1- $m 2 f s = f s1- f s2
表1
间接测尺频率 f s1
间接测尺频率 f s2
无
等效测尺频率 f s
利用FPGA实现超声波高精度大范围测距研究
D i 1 .9 9 J i n 1 0 - 1 4 2 1 . ( ) 0 o : 3 6 / . s . 0 9 0 . 0 1 3 下 . 6 0 s 3
发射 到接 收时 间数值 的一 半 ) 。 超 声波 测距 主 要 应用于 倒 车提 醒 、建 筑 工地 、
工 业 现场 等 的距 离测 量 ,虽然 目前 的测 距 量程 上 能 达 到 百 米 ,但 测 量 的 精 度往 往 只能 达 到 厘米 数
量级 。
有 着密切 的关 系。 13 超声 波测 距范 围局 限 . 在 8位 和 1 的众 多 的单 片机 中 ,其 定 时器 6位
劳l 訇 化 造
利用F G P A实现超 声波高精度大 范围测距研究
M ak us e e of FPG A o c r outt t as t ar y he ulr oni a gh defnii g a c w ve hi i t on bi r nge
文章编号 :1 0 - 14 21 )( 一0 1-0 9 0 ( 0 1 3 下) 0 4 3 0 3
0 引 言
超 声 波 测距 的原 理 是 利 用 超 声 波 在 空气 中 的
/
=
x1 6 s ̄ 00 8 u 0u 58s
.
传 播 速 度 为 已知 ,测 量 声 波在 发 射 后 遇 到 障碍 物 反 射 回来 的时 间 ,根 据 发射 和 接 收 的 时 间差 计 算 出发 射 点 到 障 碍 物 的 实 际 距 离 … 由于超 声波 易 。
一种高精度超声波测距系统设计与实现
【 K e y w o r d s ] D i s t a n c e m e a s u r e m e n t ; C h i p ; C X 2 0 1 0 6 A 0 引 言
( 1 ) 传统的测距方法 传统的测 距方法是使用尺子来测量。包括各 种各样的尺子 , 如米 尺、 卷尺 、 螺旋测微器 、 游标卡尺等等 . 这 些测量工具均需要 通过人 的 肉眼来观察测量的结果 。往往 由于人的个体差异 , 可能相 同的物体所 得到 的测量结果不一样 由于尺子 的长度有限 . 所以测量 的距离也受 到限制 。 基于以上原因, 需要采用一种 自动化的测量方 法 . 来克服上述 测量的缺陷。 ( 2 ) 现代的测距方法 现代测量距离 的方法 有很多种 . 如采 用超声波 、 激 光等不同的物 理量来进行测量 . 然后将测量 的结果转换为距离的间接测量手段越来 越多 。 而且这些测 量方法均较前面 的方法 所测的范 围更 宽 、 测量 的精 度更高 。 超声波以其容 易控制 、并且无危害等特点在测距领域广泛使用 。 下面来介绍超声波的测距方法 ( 3 ) 超声波测距方法介绍 超声波的传输速度为 3 4 0 m / s , 而实际会有些许调整。 使用上 , 通过 发送装置来先发送超声波 , 然后检查 回波 的方法来测量。 通过发送 、 接 收的时 间差可得超声波走过 的距离 . 然后将所得的距离除 以二 即为所 测的距离
De s i g n a nd I mp l e me nt a t i o n o f A Hi g h Pr e c i s i o n Ul t r a s o ni c Ra n g i ng Sy s t e m
YAO We i - pe ng
( Xi ’ n a Ae r o t e c h ic n a l Un i v e r s i t y , De p a r t me n t o f E l e c t r i c a l E n g i n e e r i n g , Xi ’ n a S h a a n x i , 7 1 0 0 7 7 , C h i n a )
一种高精度超声波测距仪测量精度的研究
通过对测距仪的结构进行优化设计和改进 , 安装了具有温度补偿功能的标准校正板 ,消除了 环境温度的变化对测距精度的影响.
第 1 期 卜英勇等 一种高精度超声波测距仪测量精度的研究 89
实测距离
/ mm 100 200 300 400 500 600 700 800 900
Ψ( t) =
12πe -
(
2
t/
2)β2
ejωt
(3)
式中 : j = - 1 ,β 为形状控制参数 , 当取 β = 1
时. 其实部 、虚部及模如图 3 所示.
图 2 超声波测距仪结构及测量示意图 Fig. 2 The structure of ultrasonic distance measurement
境噪声信号 ,获得更平滑 、理想的回波包络曲线. 利用包络峰值检测原理对小波包络后的回波信号 分析处理 ,从而准确计算回波前沿的到达时刻. 3. 2 回波信号的包络峰值检测
根据小波分析理论提出一种新的确定回波前 沿的计算方法 ,即回波信号的包络峰值检测法. 通 过示波器对回波波形进行观察 ,可以发现对同一 探测物 ,不同传播距离的回波包络线都有较好的 一致性 ,回波波形都大致相同 ,只是波幅不同 ,并 且同一距离时的不同类型探测物的回波波形也大 致相同 ,只是波幅不同. 从工程精度考虑 ,可以认 为超声回波幅值包络线的形状基本不随回波信号 的大小而变化. 即回波信号包络峰值所对应时刻 tp 与回波前沿到达时刻 t0 间的时间差 ( tp - t0) 不 随探测物远近的变化而变化. 而时间差 ( tp - t0) 也容易通过实验计算出来. 因此 ,可将接收回波信 号的包络峰值所对应的时刻 tp 作为停止记数的 时刻 ,用回波包络峰值所对应时刻与回波前沿到 达时刻的时间差 ( tp - t0) 就可消除由于时间检出 点变化所引起的测量误差. 回波信号在进行线性
超声波测距毕业设计论文
超声波测距毕业设计论文超声波测距毕业设计论文引言:在现代科技的推动下,各种测距技术得到了广泛的应用,其中超声波测距技术因其高精度、非接触等特点而备受关注。
本文将探讨超声波测距技术在毕业设计中的应用,并对其原理、方法和实验结果进行详细介绍。
一、超声波测距的原理超声波测距是利用超声波在空气中传播的特性来测量距离的一种技术。
超声波是一种频率高于人类听觉范围的声波,其传播速度与介质的密度和弹性有关。
在超声波测距中,通常使用超声波发射器发射一束超声波,经过被测物体后,超声波被接收器接收到。
通过测量超声波的传播时间,即可计算出被测物体与发射器的距离。
二、超声波测距的方法1. 时间差法时间差法是最常用的超声波测距方法之一。
该方法通过计算超声波从发射器到接收器的传播时间差来确定距离。
具体实现时,发射器发射超声波后,接收器开始计时,当接收到超声波信号后停止计时。
通过测量计时器的数值,可以得到超声波的传播时间,从而计算出距离。
2. 相位差法相位差法是另一种常用的超声波测距方法。
该方法通过测量超声波在传播过程中的相位差来确定距离。
具体实现时,发射器发射超声波信号,在接收器接收到超声波信号后,通过计算超声波信号的相位差,可以计算出距离。
三、超声波测距的应用超声波测距技术在工业、医疗、安防等领域都有广泛的应用。
1. 工业领域在工业领域,超声波测距技术可用于测量物体的距离、厚度、速度等参数。
例如,可以用于测量液体中的液位,以便控制液体的供应和排放;还可以用于测量物体的厚度,以便判断物体是否合格。
2. 医疗领域在医疗领域,超声波测距技术被广泛应用于超声诊断。
通过超声波的反射和传播时间,可以获取人体内部组织和器官的图像,从而实现对疾病的诊断和治疗。
3. 安防领域在安防领域,超声波测距技术可用于人体检测和距离测量。
例如,可以用于人体检测门的设计,以便实现对人员进出的自动控制;还可以用于测量人员与设备之间的距离,以便实现对人员的安全保护。
高精度超声波测距设计
高精度超声波测距实施方案与分析引言声波测距作为一种典型的非接触测量方法,在很多场合,诸如工业自动控制,建筑工程测量和机器人视觉识别等方面得到广泛的应用。
和其他方法相比,如激光测距、微波测距等,由于声波在空气中传播速度远远小于光线和无线电波的传播速度,对于时间测量精度的要求远小于激光测距、微波测距等系统,因而超声波测距系统电路易实现、结构简单和造价低,且超声波在传播过程中不受烟雾、空气能见度等因素的影响,在各种场合均得到广泛应用。
然而超声波测距在实际应用也有很多局限性,这都影响了超声波测距的精度。
超声波在空气中衰减极大,由于测量距离的不同,造成回波信号的起伏,使回波到达时间的测量产生较大的误差;超声波脉冲回波在接收过程中被极大地展宽,影响了测距的分辨率,尤其是对近距离的测量造成较大的影响。
其他还有一些因素,诸如环境温度、风速等也会对测量造成一定的影响,这些因素都限制了超声波测距在一些对测量精度要求较高的场合的应用,如何解决这些问题,提高超声波测距的精度,具有较大的现实意义。
一、 超声波测距基本原理与误差分析从原理上讲,超声波测距有脉冲回波法、共振法和频差法。
其中脉冲回波法测距常用,其原理是超声波传感器发射超声波,在空气中传播至被测物,经反射后由超声传感器接收反射脉冲,测量超声脉冲从发射到接收的实践s t ,在已知超声波声速s c 的前提下,可计算被测物的距离S。
单片机根据脉冲发射时间和接收到回波的时间计算出时间差t ,即超声波在空气中传播的时间,并由式(1):s s t C 21S (1) 计算出距离S ,式中参数s c 是超声波在空气中的传播速度,由于温度影响超声波在空气中的传播速度;超声波反射回波很难精确捕捉,致使超声波在空气中传播的实践很难精确测量。
这些因素使超声波测距的精度和范围受到影响。
本文从引起超声波测距误差的原因入手,分析了;①、温度对超声波声速的影响;②、回波检测对时间测量的影响;③、超声波传感器所加电压对测量精度和范围的影响;④、超声波传播过程中脉冲被展宽对接收精度的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第45卷 第4期厦门大学学报(自然科学版)Vol.45 No.4 2006年7月Journal of Xiamen University (Nat ural Science )J ul.2006 一种大角度范围的高精度超声波测距处理方法收稿日期:2005209222基金项目:国家自然科学基金(D0602240476018),厦门大学科技创新基金(00502K70013)资助作者简介:孙牵宇(1982-),男,硕士研究生.3通讯作者:xmxu @孙牵宇,童 峰,许肖梅3(厦门大学水声通信与海洋信息技术教育部重点实验室,福建厦门361005)摘要:针对移动机器人超声定位中超声收发传感器角度偏向造成的测距精度下降,本文提出了一种基于归一化波形参数特征修正的超声测距系统.传统的增益控制、可变阈值等抗起伏措施对抑制传播过程中的幅度起伏造成的测距误差效果较好,但如果传感器角度偏向使波形发生畸变,此类方法仍将造成较大误差.本文通过对传感器角度偏向造成接收信号波形畸变及测距精度下降的理论分析及实验研究,建立了超声接收信号归一化波形特征脉宽与前沿变化的关系,设计了基于单片机实现误差校正的大偏向角高精度超声波测距系统.测距实验结果表明本系统显著减小了传感器角度偏向引起的测距误差,在不同的距离上使测距精度平均提高了1.6%,同时具有成本低、使用简单、方便的特点.关键词:移动机器人定位;超声测距;角度偏向中图分类号:TP 274.53 文献标识码:A 文章编号:043820479(2006)0420513205 由于超声波测距有不受光线影响、结构简单、成本低、信息处理简单可靠、易于小型化和集成化等优点,因此,广泛应用于移动机器人定位及导航系统[1,2].超声测距的精度直接决定了机器人超声波定位的精度性能,目前许多提高超声波测距精度的研究集中在考虑传播过程中幅度起伏造成的误差[3~6],采用增益控制、可变阈值、零交叉点等抗起伏措施保证触发时刻的稳定,实现超声信号飞行时间(TOF ,time of flight )检测精度的提高.上述方法取得精度提高的前提是接收信号的归一化波形保持不变.Lamancus [7]的研究表明,当超声收发传感器轴线存在一定偏角、超声波信号偏向入射时接收信号波形会产生畸变,特别是偏角比较大的时候,如移动机器人定位中在机器人活动范围内当发射与接收传感器处于大偏向角位置时,波形由于信号斜入射而畸变大大降低了传统方法下的测距精度.这个问题严重影响了超声波定位系统在自动导引车高精度停靠等需要高定位精度、大偏角范围场合的应用.如童峰等人研制的机器人超声波导航系统[8],在小偏向角度下(轴线方向上)定位精度为1cm ,在大偏向角度下精度下降为5cm.本文根据波形畸变理论和实验的分析,针对传感器的发射角和入射角所引起的误差,提出了一种可适用于大角度范围工作条件的处理方法并设计了基于单片机的系统,实现简单方便.实验结果表明:本系统最终在大角度测距时使测距精度平均提高了1.6%.1 超声测距系统原理及影响测距精度的因素1.1 影响测距精度的因素除声速变化、噪声等影响因素外,声波在空气介质中声速的变化及散射,衰减的随机不均匀性,引起接收信号在幅度和时间轴上的起伏,是造成测距误差的一个主要原因.图1所示为固定门限电平检测下由幅度起伏引起触发电路的信号前沿不同,产生飞行时间(Time of flight )检测误差,起伏变化越大引起的误差就越大.针对这个问题提出的可变门限[3]、前沿线性前推[4]、零交叉点检测等处理方法,这些方法一个共同的前提就是幅度起伏时,信号的归一化波形基本不变(如图1中实线波形所示),如果波形发生了畸变(如图1 图1 幅度起伏(虚线是畸变波形) Fig.1 Amplitude fluctuations (dashed :distorted wave 2form )中虚线波形所示),仍将造成较大的检测误差.1.2 信号传输过程分析及斜入射影响(1)接收超声脉冲信号波形的数学模型[9,10]超声脉冲信号接收信号的波形和发射传感器、发射激励、空气对超声信号的吸收和散射、发射角、入射角有关.为简化分析起见,我们对这些作用因素进行建模分析如图2. 图2 信号传播过程 Fig.2 Process of transmission假定S (t )为发射端加的激励信号,则:Rec (t ,θT ,d ,θR )=S (t -d c)・h trans (t ,θT )・ 1dh air (t ,d )・h rec t ,θR其中:h trans t ,θT =h θt ,θT ・h T t ,h rec t ,θR=h θt ,θR ・h R t ,Rec (t ,θT ,d ,θR )为接收波形,h trans ,h air 和h rec 分别是以θT 发射角时的发射传感器、空气介质的吸收和散射,θR 为入射时的接收传感器的脉冲响应.h θ是角度偏向的脉冲响应,h T 和h R 是传感器的脉冲响应.式中空气介质h air 造成的接收波形变化在较近距离内可近似认为只有幅度上的影响[5],而超声换能器本身的特性h T 和h R 对波形的影响是固定的.因此,接收信号波形主要受传感器发射角和接收角的影响,下面分析斜入射对接收信号波形的影响.(2)发射角和入射角对接收信号的影响从接收传感器进行理论分析,在远场时(一般应用场合均满足),入射超声波可看成是平面波,令入射波对传感器的激励强度正比于入射波与传感器面的相交区域的面积,则传感器的输出信号也正比于这个相交区域的面积.对圆形入射面的接收传感器,如图3.当入射的平面波垂直入射时,对传感器的激励发生在同一时刻,同一作用强度,则其脉冲响应可看作一冲激信号,即垂直入射时不影响输出波形的形状和频谱;当入射波以角度θ入射时,入射平面波从传感器面的一端开始扫过整个传感器面,在任一时刻相交区域是传感器面上的一条弦,则对传感器的激励强度曲线即脉冲响应曲线为传感器面一端到另一端的一族平行弦的弦长,时域上是一个半椭圆[9]: 图3 信号斜入射 Fig.3 Signal reception under angular misalignmenth rec (t ,θ)=4c co sθπD sin θ1-2tt w2,-t w2<t <t w20, 其它其中,D 是圆形接收换能器的直径,c 为空气中声速,t w 是入射平面波从传感器面的一端开始扫过整个传感器面所用的时间.根据传感器的互易原理,发射传感器发射角对接收信号的脉冲响应可写为:h rec t ,θ=h trans t ,θ=h θt所以,当测距超声波信号垂直入射传感器时,h θ(t )表现为全通滤波器,接收信号波形与两传感器互相对准时的接受信号波形基本一致,而当发射和接收出现越来越大的角度时,接收波形等效于脉冲响应为一越来越宽的椭圆曲线的滤波器,频域上表现为截止频率趋低的低通滤波器,此时所得到的接收信号波形与两传感器互相对准时的接受信号波形有显著不同.因此,可变门限[4]、前沿线性前推[5]、零交叉点等处理方法在发射接收角度较小的条件下可有效提高精度,但对于较大的角度偏向造成波形畸变,效果将大大下降.2 波形前沿与波形特征宽度关系研究针对这个问题,本文提出根据信号畸变中波形特征参数的变化对检测误差进行校正的思路.考虑到移动机器人超声波定位系统中通常要求超声测距部分结构简单、实现方便,本文选取易于获取的1/2峰值为门限所得信号脉宽作为波形特征宽度,并通过实验研究其与前沿变化的关系.2.1 实验数据在温度为28℃的条件下,在实验室内,设置收发传感器的距离为35cm ,固定接收传感器,使发射传感器在以接收传感器为圆心,半径分别为35cm 的圆弧上移动,移动的角度范围在0°到60°之间.为补偿斜入射造成信号幅度的下降,对波形进行归一化处理后,测量各偏向角度下接收信号1/2峰值处的波形特征宽度T w 和波形前沿的位置T p .图4为・415・厦门大学学报(自然科学版) 2006年 图4 不同偏向角度下的接收波形 Fig.4 Reception waveforms at different angular misalignment收发传感器相距35cm时同一触发时间下测得的入射角度分别为0°,30°,40°,60°的接收波形.可发现随着偏向角度的加大,接收归一化波形的特征宽度先减小再增加,而波形前沿先稍微前移,然后一直向后移.由此可知,对归一化处理后的波形进行阈值检测虽可抑制幅度起伏引起的触发时刻漂移造成的TO F检测误差,但在大偏向角情况下触发电路的信号前沿前移,检测结果将明显小于真实值,产生较大误差.2.2 误差修正原理图5是根据距离为35cm处测得的数据而画出前沿触发时刻和特征宽度随偏向角的变化曲线.定义 图5 T w和T p的变化曲线 Fig.5 Curves of T w and T p△T w为接收波形特征宽度相对于入射角0°(即垂直入射)时的变化量,则根据图5曲线可看出在入射角小于40°时,波形的前沿变化不大(△T w<0.2ms),此时不会产生大的门限检测的误差;而偏向角在40°~60°之间时,△T w>0.2ms,波形的前沿有较明显变化,影响了门限检测的精度,造成较大误差.我们本着设计简单、易实现的初衷,根据在大偏角情况下前沿到达时刻和波形特征宽度分别呈减小和增加的趋势,提出下列修正误差的方法:(1)当0.4ms>△T w>0.2ms时,T2=T1+ 0.04ms;其中,T1是误差补偿前的前沿位置,T2是误差补偿后的检测结果.(2)当△T w>0.4ms时,T2=T1+0.06ms;这样我们就可以通过获得△T w的值来对T p进行补偿,经过校正后所得到的前沿触发时刻T2再减去一固定偏移值即可得到不同偏向角条件下的高精度TO F检测结果.3 新的高精度处理方法3.1 系统设计根据上述分析,我们设计了基于单片机的大角度超声波高精度测量系统.该测距系统结构框图如图6・515・第4期 孙牵宇等:一种大角度范围的高精度超声波测距处理方法 图6 系统框图Fig.6 Block chart of the proposed system所示.用单片机产生脉冲信号通过传感器发出40k Hz的超声波.接收信号经放大、带通滤波,然后经过A GC (自动增益控制)电路使信号幅度保持稳定,通过检波电路检出波形包络并经过1/2峰值门限的比较器,输出信号送单片机,单片机记录信号前沿触发时刻T p (用来计算测距的距离),及持续宽度T w (波形特征宽度,用来修正误差),并根据上述的△T w 和T p 关系进行误差校正,最后输出高精度测距数据.3.2 实验结果本实验的数据是在实验室内,温度为28℃的条件下得出的.固定接收传感器,使发射传感器在以接收传感器为圆心,270mm ,470mm ,570mm ,900mm 的圆弧上移动,移动的角度范围在0°到60°之间(-60°到0°范围数据可根据对称性获得).考虑到超声传感器本身的发射接收指向较尖锐(本实验中采用的传感器3dB 主波束角为±40°),大偏角接收时信噪比大大下降,实验设置的工作距离在1m 内.为了比较修正前后的精度变化情况,本文对A GC 增益控制稳定信号幅度后直接检测和本文方法的测距精度进行比较实验,考虑到可变阈值和零交叉点等方法和增益控制方法本质上都是针对幅度起伏的,因此当波形畸变时,其测距误差变化趋势大致相同.根据实验数据画出在4个不同距离上修正前和修正后的测距性能对比图(图7).从图7可看出,随着偏向角度的增大,增益控制检测的测距误差也逐渐增大,特别是在大于40°后误差增加明显.当采用本文提出的误差修正处理后,误差得到较好的补偿,1m 范围内大偏向角(±60°)情况下测距精度从12.24mm 显著提高到了3.4mm .4 结 论为了提高移动机器人超声定位等需要大工作范围场合下的超声测距精度,本文通过对大角度偏向造成 图7 测距实验结果 Fig.7 Experimental results of distance measurement信号波形畸变的研究,在超声测距系统中引入了角度偏向误差修正技术,利用接收波形的特征宽度来对波形前沿进行校正,使门限检测飞行时间TO F 的精度提高.实验结果表明此修正方法简单实用,与增益控制检测处理方法相比超声测距系统的大偏角(±60°)工作精度明显提高.且系统结构简单、实现方便,适用于自动导引车高精度停靠、机器人高精度定位、虚拟现实系统人机交互输入等需要较大工作角度、高测距精度的场合.考虑到本文采用的超声传感器指向特性较尖锐(3dB 主波束角为±40°),本实验中的大偏角测距距离较小(1m 内),但这已能满足自动导引车停靠等需较近距离、高精度定位的场合的要求.若采用具有更宽的主波束角的超声波传感器,工作距离将可进一步扩大.同时,本文采用的波形修正参数只适用于本实验中采用的换能器及滤波电路,对于不同指向特性、频率特性的换能器及滤波电路,本文方法中的修正参数需重新设定.・615・厦门大学学报(自然科学版) 2006年参考文献:[1] 贾莉娜.高精度的超声波测距系统在移动机器人导航方面的应用[J ].计量与测试技术,2004(9):23-26.[2] 罗本成,原魁,楚坤水,等.一种超声测距的鲁棒自适应建模方法[J ].机器人,2002,24(1):554-558.[3] 杨劲松,王敏,黄心汉.超声波可变阈值测距装置[J ].电子技术应用,1998,24(7):7-9.[4] 王春麟.提高超声回波检测测距精度的方法[J ].电测与仪表,1995,(2):22-24.[5] 童峰.自动导引车超声导引系统研究[D ].厦门:厦门大学,2000.[6] Figueroa J F ,Doussis E.A hardware 2level method to im 2prove the range and accuracy of an ultrasonic ranging sys 2tem[J ].ACUSTICA ,1993,78:226-232.[7] John S Lamancusa ,Fernando Figueroa J.Ranging errorscaused by angular misalignment between ultrasonic trans 2ducer pairs[J ].J.Acoust Soc.American ,1990,87(3):1327-1335.[8] 童峰,许天增.一种移动机器人超声波导航系统[J ].机器人,2002,24(1):55-61.[9] Teruko Yata ,Lindasy Kleeman ,Shin ′ichi Yuta.Fast 2bea 2rin measurement with a single ultrasonic transducer [J ].The International Journal of Robotics Research ,1998,17(11):1202-1213.[10] Lindsay kleeman ,Oman Kuc.Mobile robot sonar for tar 2get localization and classification [J ].The International Journal of Robotics Research ,1995,14(4):295-318.A High Precision U ltrasonic R anging Method underMisalignment of T ransducer P airsSUN Qian 2yu ,TON G Feng ,XU Xiao 2mei 3(Key Laboratory of Underwater Communication and Marine Information Technology of MO E ,Xiamen University ,Xiamen 361005,China )Abstract :To tackle the precision degradation caused by misalignment of transducer pairs in mobile robot localization ,an adjust 2ment strategy based on normalized waveform parameter is proposed to derive a high precision method for wide 2field ultrasonic ran 2ging.Presently most investigation on high precision ultrasonic ranging focused on the amplitude fluctuation induced by random air medium.Nonetheless ,previous research indicated that the impact of transducer misalignment on reception signal waveform can be modeled as a low 2pass filter ,which will cause waveform distortion of reception signal.Thus the performance of traditional approaches to improve the ultrasonic ranging precision such as automatic gain control (A GC )or variable threshold will be seriously affected un 2der misalignment of transducer pairs.In this paper ,with theoretical analysis and experimental research on the impacts of transducer misalignment ,the relationship between the rising edge and characteristic width of normalized waveform is investigated ,which is used to develop an adjustment approach and design a SCM (Single Chip Microcomputer )based high precision wide 2field ultrasonic ranging system.The experimental results show this system greatly improves the ranging precision under transducer misalignment ,validating the effectiveness and convenience of the proposed pared with traditional A GC type method ,it improves the ranging preci 2sion by about 1.6%.K ey w ords :mobilerobot localization ;ultrasonic ranging ;angular misalignmen・715・第4期 孙牵宇等:一种大角度范围的高精度超声波测距处理方法。