北斗地基增强系统建设实施方案
北斗安装施工方案
北斗安装施工方案
一、前言
在现代导航技术的发展中,北斗导航系统作为我国自主建设的卫星导航系统,具有重要的战略意义和广泛的应用前景。
为了促进北斗导航系统的应用,本文将探讨北斗安装施工方案,以指导相关项目的顺利实施。
二、项目背景
2.1 项目概述
北斗安装施工项目旨在在各类车辆、设备或建筑物中安装北斗导航设备,实现定位、导航和通信功能。
2.2 项目目标
•提高车辆、设备或建筑物的定位精度和导航准确性
•改善通信效率,确保数据传输的稳定性
•推动北斗导航系统在不同领域的广泛应用
三、施工方案
3.1 前期准备
在施工前,需完成以下准备工作:
•确定安装位置和布局方案
•确保所需设备和材料齐全
•制定详细的工程方案和时间进度表
3.2 安装流程
步骤一:准备工作
•清理安装位置,确保平整干净
•检查设备和材料的完好性和对应关系
•拆除原有设备(如有)
步骤二:安装设备
•按照布局方案,安装北斗导航设备
•连接相关电源和通信线路
•调试设备,确保正常运行
步骤三:收尾工作
•整理施工现场,清理材料和工具
•进行设备的功能性测试
•形成安装报告,记录安装过程和结果3.3 售后服务
安装完成后,需进行售后服务:
•指导用户正确使用北斗设备
•定期检查设备运行情况,及时维护和维修•处理用户反馈及意见,优化服务体验四、总结
北斗安装施工方案是保障北斗导。
农用北斗地基增强系统的建立

农用北斗地基增强系统的建立司南导航张冬冬农业是国民经济的基础,自改革开放以来,我国对农业方面的支持从未放松并且在逐步加大投入力度。
随着农村土地流转的持续推广和农业机械化水平的提高,我国农业正逐步由机械化向精准化迈进,信息化的农场管理平台、精细化的农田作业、精准的田间管理,这些都是精准农业的产物也是未来农业的发展方向,也是实现农业可持续发展的必要途径。
一、精准农业与北斗地基增强网精准农业是指利用遥感、卫星定位系统、地理信息系统等技术,实时获取农田每一平方米或几平方米为一个小区的作物生产环境、生长状况和空间变异的大量时空变化信息,及时对农业进行管理,并对作物苗情、病虫害、伤情等的发生趋势进行分析、模拟,为资源有效利用提供必要的空间信息。
在获取信息的基础上,利用智能化专家系统、决策支持系统,按每一地块的具体情况做出决策,准确地进行精准播种、精准施肥、精准喷洒农药、精准灌溉、精准收获等精准生产管理。
精准农业的主要技术支撑有:全球定位系统(GNS)地理信息系统(GIS)、遥感技术(RS、产量分布图生成系统(YMS、变量控制技术(VRT、农业生物采集技术、决策支持系统(DSS、智能化农作变量机械(IFM)。
其中,技术支撑排在第一位的就是全球卫星定位系统,随着2012 年我国自主建设、独立运行的北斗卫星导航系统实现了亚太地区的信号覆盖,北斗逐渐取代捷大众所熟知的GPS卫星导航系统,开始应用在我国社会经济生活的方方面面。
但是不同行业、不同领域对卫星导航定位精度的要求不尽相同,有些专业领域对定位精度的误差要求甚至要低于1cm而卫星的信号从太空到地面要经过很多干扰,导致单点定位精度仅能达到米级,为了提高定位精度和适应不同用户对精度的要求,建设地基增强系统的需求应运而生。
北斗地基增强系统(连续运行参考站系统)是一个或若干个固定的、连续运行的GNSSS站,利用现代计算机、数据通信和互联网(LAN/WAN技术组成的网络,向不同类型、不同需求、不同层次的用户提供GNSS实时观测值(载波相位,伪距),各种改正数、状态信息,以及其他有关GNSS I服务项目的信息。
北斗地基增强系统建设方案

北斗地基增强系统建设方案一、背景介绍北斗卫星导航系统是中国自主研发的一种卫星导航定位系统,具有全球覆盖、高精度、高实时性和高可靠性的特点,被广泛应用于陆地、海洋、空中和航天等领域。
为了进一步提高北斗系统的使用效果和定位精度,北斗地基增强系统建设显得尤为重要。
二、目标本方案旨在建设一个完善的北斗地基增强系统,提高北斗系统的定位精度和使用效果,满足用户对高精度导航定位的需求。
三、建设内容1.增加地面基站密度:建设更多的北斗地面基站,提高北斗信号接收覆盖范围。
基站之间的平均距离控制在30公里以内,以保证接收到的信号质量和定位精度。
基站之间的连接采用高速互联网络,确保数据的实时传输。
2.基站建设和设备更新:选址合理,考虑到信号传播的特点,尽量选在高海拔、开阔地带,减少地形地貌对信号传输的影响。
基站应配备高性能的天线、接收机和信号处理设备,以提高信号接收和处理能力。
同时要加强基站的设备更新和维护,保证设备的可靠性和稳定性。
3.建设数据中心:建设一个专门用于数据处理和分析的中心,用于接收、处理和存储北斗地基增强系统产生的海量数据。
数据中心要采用先进的大数据分析技术,对数据进行深入挖掘和分析,提取出有价值的信息,为用户提供更加精确和实用的导航定位服务。
4.提高用户终端设备的兼容性:开发适用于不同终端设备的导航软件和硬件驱动程序,提高用户终端设备对北斗系统的兼容性。
同时,在终端设备中集成地基增强系统的功能,使用户可以通过终端设备直接接收和使用加强后的北斗信号。
5.加强用户培训和推广:组织相关培训,提高用户对北斗地基增强系统的认知和使用能力。
同时,通过各种宣传渠道,宣传北斗地基增强系统的优势和功能,推动系统的推广和应用。
四、实施步骤1.前期准备:进行项目规划、选址和立项,确定建设经费和时间计划。
2.建设基站和数据中心:根据选址要求,依次建设基站和数据中心,并配置相应的设备。
3.测试与优化:对建设的基站和系统进行功能测试和性能优化,以确保其正常运行和满足用户需求。
北斗地基增强系统建设

前
期
调
客户数据结构信息
研
在线支付接口
其它资源信息
数
据 建 库
系
统
建
用
设
户
管
理
系
统
CORS
CORS CORS
用户数据库 文件数据库
交易数据库 服务数据库
CORS系统用户管理与服务平台
资 源 服 务 系 统
移 动 端 应 用 系 统
微
其
信
系
他
官
统
业
网
一
务
服
期
接
务
接
口
系
口
系
统
系
统
统
系统以Intenet网络和系统内部局域网为纽带,以CORS系统各类成果为基 础,以社会应用为主线,以信息服务为宗旨,以安全系统和技术标准为保障, 形成互连互通、贯穿上下的用户管理、决策支持和信息服务的“5+2”运行 体系。
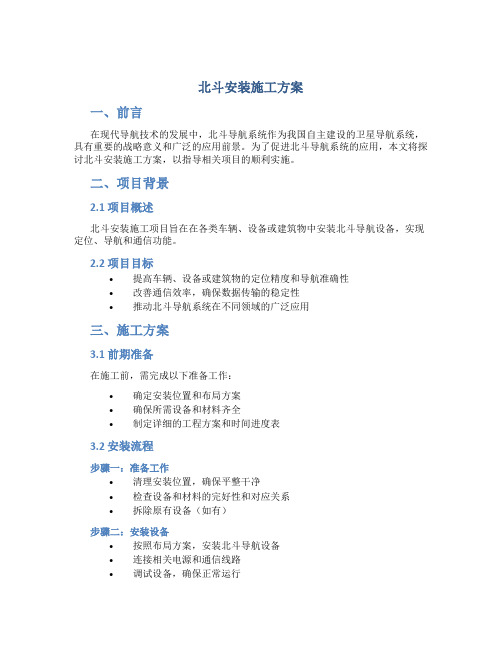
房顶观测墩
基准站设备示意图
GNSS天线
原子钟(核心站)
显示器
工控机 键盘、鼠标
GNSS接收机 调试用滑动托盘
光端机 路由器 直流供电系统主机 交流供电系统主机 线缆存放处
气象探头及防辐射罩
直流电源电池组 气象仪主机
交流电源电池组 交流电源电池组
气象仪主机
基准站主要设备:
GNSS接收机、防火墙、UPS电 源、发电机等
MH(m)
内符合精度 0.0044
0.0047
0.0129
外符合精度 0.0279
0.0307
0.0607
第三章 系统测试
第二节、测试指标
2、空间可用性测试
北斗卫星导航地基增强系统设计与测试分析

第4期2024年2月无线互联科技Wireless Internet Science and TechnologyNo.4February,2024作者简介:许鹏(1986 ),男,助理工程师,学士;研究方向:卫星导航㊂北斗卫星导航地基增强系统设计与测试分析许㊀鹏,赵㊀伟,罗㊀伟,兰㊀伟,桑㊀飞(61773部队,新疆乌鲁木齐831100)摘要:文章首先回顾㊁总结了全球卫星地基增强系统的产生㊁发展和演化情况,介绍了我国北斗卫星地基增强系统的现状;其次,对网络RTK 的误差和影响定位精度的因素进行了剖析研究,并以新疆地区为例,分别将北斗卫星地基增强系统与移动网络定位和GPS 系统定位精度进行对比;最后,将北斗系统与GPS 系统组合定位精度进行评估,探索北斗卫星地基增强系统的定位效果㊂关键词:北斗;定位精度测试;地基增强系统;CORS 系统中图分类号:TN953+.7㊀㊀文献标志码:A 0㊀引言㊀㊀随着2020年6月23日北斗3号最后一颗全球组网卫星在中国西昌卫星发生中心成功发射并顺利进入预定轨道,标志着我国北斗全球系统星座部署和北斗3号系统组网完成,同时也代表4大全球卫星导航系统划分天下的局面正式形成㊂对于4大导航系统在非遮蔽条件下的基本服务均可以满足10m 左右的精度要求㊂但随着科学技术发展和城市建设质量要求的不断提升以及对定位精度需求的提高,基本服务已经远远不能满足像测绘作业㊁国土勘探㊁精准农业等高精度领域的需求㊂为了提高定位精度并且满足各类用户的不同需求,卫星导航增强技术与系统便应运而生㊂1㊀全球卫星地基增强系统的产生和发展历程1.1㊀全球卫星导航增强技术与系统㊀㊀卫星导航增强技术最早是为了应对随着全球卫星导航系统应用的不断推广和深入,目前的卫星导航系统还不能满足一些高端用户的要求㊂而发展起来的美国GPS 系统选择可用性(SA)政策,2000年美国取消了SA 政策,在一定程度上提高了导航定位精度㊂为此各种卫星导航增强系统应运而生㊂目前,国外卫星导航增强技术主要分为2大类,一类是星基增强系统(Satellite -Based AugmentationSystem,SBAS),另一类是地基增强系统(Ground -Based Augmentation Systems,GBAS)㊂1.2㊀GBAS 地基增强系统㊀㊀局部面积增强系统(Local Area AugmentationSystem,LAAS)最早主要是为航空机场提供高完整性增强服务,由FAA 提出,后FAA 和ICAO(国际民航组织)已停止使用 LAAS 这一词,取而代之的是 GBAS ㊂相比于SBAS,单个GBAS 建设成本较低,且现有完好性相对较高[1]㊂2㊀北斗地基增强系统㊀㊀北斗地基增强系统是北斗卫星导航系统的重要组成部分,不仅能满足 技术先进㊁高效可靠㊁经济适用和易扩展 的标准,而且还能与其他技术相结合,构建一个更加完善㊁灵活的北斗导航服务体系㊂它可以根据1~2m㊁dm 级㊁cm 级的测量结果,使得北斗/GNSS 技术能够更加有效地应用于各种领域㊂3㊀网络RTK 技术3.1㊀传统RTK 定位技术㊀㊀传统的实时动态差分定位技术(Real -TimeKinamatic,RTK)基于高精度的载波相位观测值可用于快速静态定位,在应用中遇到的最大技术难题就是参照位置校正数据的有效作用距离㊂定位误差的空间相关性随着参照位置和移动位置距离的增加而逐渐失去线性,在一定距离下(单频大于10km,双频大于30km),经过差分修正处理后的用户数据还是有较大误差,导致定位精度降低而无法解算载波相位的整周模糊度问题㊂因此,为了保证所需定位精度,传统的单机RTK 使用距离十分有限[2]㊂3.2㊀网络RTK 定位技术㊀㊀在20世纪90年代中期,技术人员提出了网络RTK 定位技术的概念,以解决传统RTK 技术的不足㊂网络RTK 是在某一地区建立若干个基准站,构成对该地区的网状覆盖,并以这些基准站中的一个或多个为基准,向该地区相应地纠错信息,从而实现定位精确度的实时提升㊂与传统RTK 技术相比,网络RTK 定位技术不但扩大了覆盖范围,而且进一步压缩作业成本,提高了定位精度,减少了定位的初始化时间㊂网络RTK 系统的组成包括基准站网子系统㊁中心子系统㊁通信子系统㊁用户数据中心子系统㊁应用子系统,如图1所示㊂图1㊀网络RTK 系统组成3.3㊀连续运行参考站系统㊀㊀连续运行参考站系统(Continuous OperationalReference System,CORS)是由常年连续运行的若干固定基准站组成的网络系统,利用卫星导航定位㊁计算机㊁数据通信和互联网络等技术,按一定距离在一个个国家(区域)建立的㊂目前网络RTK 系统都是基于CORS 系统打造的,即很多CORS 系统都包含了网络RTK 定位功能㊂因此,CORS 的发展现状也体现了网络RTK 制式的发展现状㊂4㊀网络RTK 误差及导航系统精度分析4.1㊀网络RTK 误差分析㊀㊀导航信号从卫星的天线发射出来到接收机天线接收,然后由用户端接收机把测距信号量测出来,其中存在诸多影响因素,从而产生一定的误差㊂网络RTK 误差考虑到如下2方面:(1)天线相位中心偏差㊁多路径效应㊁无线电信号干扰以及与参考站㊁移动站有关的误差㊂(2)相对论效应㊁电离层误差和对流层误差等和星站间距离造成的误差㊂4.1.1㊀天线相位中心的偏差㊀㊀GNSS 测量可以用来检验天线的相位,可以通过计算卫星的质心来估算它们之间的距离㊂然而,这种方法的结果可能会受到精确星历的影响,导致它们的估算值可能会存在偏差㊂IGS 发展使得RTK 的施测变得更加精确,它通过比较使用者和被观察者的天线以及它们之间的相互影响,获取更准确的信息㊂这种方法大大提高了RTK 的精度,使其能够更好地反映实际情况㊂研究发现,天线的相位偏移主要由于它的天顶距对其产生的影响㊂然而,对于更精细的测量,笔者选择了50ʎ作为参考点㊂经过测量,可以看出随着角度的增加,数据误差也会随之增加㊂从0ʎ开始,误差几乎没有受到干扰,但是当角度达到45ʎ时,误差会达到最高,并且随着角度的增加,误差也会继续增加[3]㊂4.1.2㊀多路径效应的影响㊀㊀多路径效应(Multi Path Effect,MPE)是指各分量场在电磁波经过不同路径传播后,按各自相位相互叠加,使原有信号失真或产生错误,到达接收端的时间不同而产生的干扰㊂此类多路径现象会使接收方观察信号出现错误,造成追踪信号难度较大,该现象即为多路径效应㊂多路径效应对导航测量来说最为严重和危险,通常引起的误差约5cm 即可,而当反射系数大时则可能超过,误差值可达19cm 以上㊂特别是在多径效应的伪距离观测时,其错误可能高达10m或更高㊂多径误差和其他种类误差有所不同,除了与接收机天线圈周围存在环境及近㊁远反射物质有关外,还可以在一段时间内发生改变㊂因此多路径效应误差具有时变的复杂多样性,在实际应用中,很难用统一的模型进行描述㊂4.1.3㊀对流层延迟及其修正方法㊀㊀对流层是从地面开始向上延伸约50km 的大气层㊂在卫星信号传输过程中,对流层发生信号延迟的情况占到信号延迟的80%㊂当卫星导航信号穿过对流层时,信号的传播速度和路径就会发生变化,这种现象叫作对流层延迟(Transference)㊂对流层延时90%成因是由于大气层内的干燥分量导致的;剩下10%是由水蒸气导致的,称为湿度成分㊂因此,可通过对天顶方向干燥㊁湿度分量延时及对应投影函数表达对流层延时㊂ΔP trop =ΔP z ,dry M dry (E )+ΔP z ,wet M wet (E )(1)式中,ΔP trop 为对流层总延迟,ΔP z ,dry 为天顶方向对流层干分量延迟,M dry (E )为相应的对流层干分量投影函数,ΔP z ,wet 为天顶方向对流层湿分量延迟,M wet (E )为相应的对流层湿分量投影函数㊂当今,许多不同的对流层校验方法已被提出,而Hopfield㊁Saastamoinen 等新一代校验方法提供的数据比美国标准大气层的校验方法精度更高,误差仅为几毫米㊂在天顶方向,各模型的延迟改正误差都在20mm 以内,而湿分量部分的残余影响还是比较大㊂Hopfied 模型直接给出干分量和湿分量在传播路径上折射改正量(不再需要映射函数):ΔD trop =ΔD dry +ΔD wet(2)令i =dry ,wet ,则干湿分量用下式表示:ΔD i =10-6N i ð9k=1αk ,i k γk i éëêêùûúú(3)其中,折射指数公式为:N dry =0.776ˑ10-4P /T(4)N wet =0.373e /T 2(5)在这个方程中,用T ㊁P ㊁e 3个不同的参数来描述:大气温度(K)㊁大气压力(mbar )以及水气压(mbar)㊂r dry ㊁r wet 这些参数代表了从测量站出发,沿着干湿折射指数逐渐接近零的边缘线的距离(m),可以用下列公式来进行计算:γi =(γ0+h i )2-(γ0cos E )2-γ0sin E(6)在这公式中,边缘界面的高度(m)逐渐降至零,干湿折射指数分别为:h dry =40136+148.72(T -273.16)(7)h wet =11000(8)上面式中的系数为:g m =1.0-0.0026cos2B -0.28ˑ10-6Hα1,i =1α2,i =4a iα3,i =6a 2i+4b i α4,i =4a i (a 2i+3b i )α5,i =a 4i +12a 2i b i +6b 2i α6,i =4a i b i (a 2i+3b i )α7,i =b 2i (6a 2i+4b i )α8,i =4a i b 3i α9,i =b 4i a i =-sin Eh ib i =-COS 2E 2h i r 0在这些公式中,E 表示卫星的高度角,r 0表示测站的地心向径(m),P ㊁e 分别表示以mbar 为单位的测站大气压和水气压,T 表示测站的K 氏温度㊂Saastamoinen 模型为:ΔD dry =0.002277p g m(9)ΔD wet =0.002277g m1255T +0.05()e (10)其中,e 为水气压,可以根据测站上的相对湿度RH 来计算水气压㊂e =RH ˑexp(-37.2465+0.213166ˑT -0.000256908ˑT ˑT (11)g m 为平均重力,g m =1.0-0.0026cos(2B )-0.28ˑ10-6H ;B ㊁H 分别为用户纬度和高程㊂Saastamoinen 模型的投影函数采用了一种叫作Niell 的干分量投影函数,它的干分量投影函数为:m Hydro (ε)=1+a Hydro1+b Hydro1+c Hydro sin ε+a Hydrosin ε+b Hydro sin ε+c Hydro+1sin ε-1+a ht 1+b ht 1+c ht sin ε+a htsin ε+b ht sin ε+c ht éëêêêêêêêêùûúúúúúúúúˑH 1000(12)式中,ε为高度角,H 为正高,而干分量投影系数则由a Hydro ㊁b Hydro ㊁c Hydro 来表示;a ht =2.53ˑ10-5b ht =5.49ˑ10-3c ht =1.14ˑ10-3如果测站纬度Ø满足150ɤ|Ø|ɤ750,干分量投影系数利用下式进行内插计算,内插系数由系数表给出㊂p (Ø,t )=p avg (Øi )+[p avg (Øi +1)-p avg (Øi )]ˑØ-ØiØi +1-Øi +p amp (Øi )+[p amp (Øi +1)-p amp (Øi )]ˑØ-ØiØi +1-Øi{}ˑcos 2πt -T 0365.25()(13)式中,p 表示要计算的系数a Hydro ㊁b Hydro 或c Hydro ,Øi 表示表中与Ø最接近的纬度,t 是年积日,T 0为参考年积日,取T 0=28,a Hydro ㊁b Hydro ㊁c Hydro 的平均值及其波动值如表1所示㊂表1㊀干分量投影函数内插系数纬度a Hydro (average )b Hydro (average )c Hydro (average )a Hydro (amp )b Hydro (amp )c Hydro (amp )150.0012769930.0029153700.062610510.00.00.0300.0012683230.0029152300.062837390.000012709630.000021414980.00009012840450.0012465400.0029288450.063721770.000026523660.000030160780.00004349704600.0012196050.0029022570.063824270.000034000450.000072562720.00084795348750.0012046000.0029024910.064258460.000041202190.00011723380.00170372060㊀㊀而对于纬度Ø,|Ø|ɤ15ʎ,有:p (Ø,t )=p avg (15ʎ)+p avg (15ʎ)ˑcos(2πt -T 0365.25)(14)对于纬度Ø,|Ø|ȡ75ʎ,有:p (Ø,t )=p avg (75ʎ)+p avg (75ʎ)ˑcos(2πt -T 0365.25)(15)Niell 湿分量投影函数为:m wet (ε)=1+a wet1+b wet1+c wet sin ε+a wetosin ε+b wetsin ε+c wet(16)其湿分量投影系数a wet ㊁b wet ㊁c wet ,对于15ʎɤ|Ø|ɤ75ʎ是利用下式进行内插计算,内插系数如表2所示㊂p (Ø,t )=p avg (Øi )+[p avg (Øi +1)-p avg (Øi )]ˑØ-ØiØi +1-Øi(17)表2㊀湿分量投影函数内插系数纬度a wet (average )b wet (average )c wet (average )150.0005802180.0014275270.0434*******.00056794850.0015138630.04672951450.00058118020.0014572570.0439*******.00059727540.0015007430.04462698750.00061641690.0017599080.05473604而对于纬度Ø,|Ø|ɤ15ʎ,有:p (Ø,t )=p avg (15ʎ)(18)对于纬度Ø,|Ø|⩾75ʎ,有:p (Ø,t )=p avg (75ʎ)(19)4.1.4㊀电离层延迟及其修正方法㊀㊀随着日照㊁X 射线㊁γ射线等多种射线的照射,50~1000km 地表上的中性气体分子会经历一系列的物理现象,这些现象构成了一个复杂的物理系统,其特点是:随着射线的照射,这些物质会经历一系列物理反应,最终形成一个复杂的物理系统,它的物理特征就像一个复杂的物理系统㊂由于路线出现了轻微的变形,因此,将光速c 与时间Δt 相除,所获取的ρ与其本身的几何尺寸并无关联㊂通常电磁波在电离层中的折射率为:n 2=1-X1-Y 2T2(1-X )ʃY 4T4(1-X )2+Y 2L(20)式中,X =f 2p f2=N e e 24π2ε0mf2;Y T =f H f sin θ;Y L =f H fcos θ;ʃ的值取决于使用的电磁波的极化特性㊂N e电子密度是指每立方米空间中自由电子的数量;e 为电子电量,为1.6022E -19C;ε0为真空中的介电常数,为8.8542E -12F /m;θ代表电磁波在传播过程中与地球磁场的夹角;f 表示入射的电磁波的频率;f H 自由电子的回旋频率是指它们在受到地球磁场的影响时,其运动的特性和强度;f p 为等离子体频率,使电中性等离子平板产生振荡的特性频率时,从离子中分离出自由进行自由运动㊂因此,电离层造成的误差,主要是由信号频率㊁观测方向的仰角㊁观测时间电离层情况等因素决定,与卫星到接收机视线方向的电子密度有关㊂此外,当电离层剧烈活动时,可引起多普勒频移的变化,因为总电子含量的变化很快,从而可能造成相位的频繁脱锁㊂双频电离层修正模型,目前使用较多的电离层修正模型,可以有效地将残余误差降至总量1%以下㊂双频修正采用2个频点B 1㊁B 2,伪距观测量可以表示为:ρi =ρ0+If 2i (i =1,2)(21)可以得到:ρ0=aᶄρ1+bᶄρ2(22)其中:aᶄ=f 21/(f 21-f 22)bᶄ=f 22/(f 21-f 22)假定伪距观测量ρ1㊁ρ2的观测噪声有相同的均方差σn ,且相互独立,那么ρ0相对于单频测量下的归一化均方差可表示为:σρ0σn=aᶄ2+bᶄ2(23)由上式可计算出双频修正后得到的伪距观测量的观测噪声是单频测量的观测噪声的2.8976倍㊂如果采用频点B 1㊁B 3进行双频修正,那么双频修正后得到的伪距观测量的观测噪声是单频观测量的观测噪声3.5119倍;如果采用频点B 2㊁B 3进行双频修正,那么双频修正后得到后的伪距观测量的观测噪声是单频测量噪声的14.2866倍㊂计算电离层修正时应采用B 1㊁B 2频点上的伪距观测量,综合考虑估计精度和计算复杂度,对电离层进行修正㊂4.1.5㊀相对论效应㊀㊀在惯性空间中,被称为相对论效应的卫星时钟之间的相对运动㊂相对论效应可以划分为狭义和广义2类㊂按照狭义相对论的原则,安装在高度飞行卫星中的卫星钟频率f s 将会变为:f s =f 1-V 2s2c 2()(24)即Δf s =f s -f =-V 2s2c 2f ,式中V s 为卫星在惯性坐标系中运动的速度,f 为同一台钟的频率,c 为在真空中的光速㊂如将地球同步轨道卫星平均速度V s =3874m /s,c =299792458m /s 代入即可得:Δf s =-0.835ˑ10-10f (25)这说明,与静止在地球上的同类型时钟相比,地球同步轨道卫星的卫星时钟速度要慢一些㊂按照广义相对论,同样的时钟,在卫星上的频率会差,在地面上的频率也会差㊂Δf 2=W s -W k c 2f(26)其中,W s ㊁W k 分别为卫星所处位置的地球引力位和地面测站处的地球引力位㊂广义相对论的影响范围较小,可以将地球的重力位置视为一个单独的质点,于是有:W s =-μγW K=-μR ìîíïïïï(27)其中,μ为地球引力常数;R 为测站到地心的距离;γ为卫星到地心的距离㊂于是,Δf 2可得:Δf 2=μc 2f 1R -1γ()(28)总的相对论效应为:Δf =Δf s +Δf 2=μc 2éëêêùûúú1R-1γ()-V 2s 2c 2f (29)卫星钟比地球同类型钟的频率是增加的,解决办法是在制造卫星钟时把频率降低,以解决当这些钟进入轨道受到相对论效应影响时,频率刚好为标准频率㊂然而,上述相对论效应的影响,并不是常数的地球的运动和卫星轨道高度的改变以及地球重力场的改变㊂经上述修正后,存在残差影响卫星时间最长可达70ns,对卫星钟速影响可达0.01ns /s,这一影响必须考虑在高精度的单点定位中㊂4.2㊀导航定位精度分析㊀㊀影响导航的性能指标主要包括4个指标:精确度㊁完好度㊁可用性㊁连续性,而精确度指标是各系统为用户提供稳定可靠服务的保证,也是用户选择导航系统的重要依据,是各系统服务性能的最主要指标[4]㊂导航系统的服务精度主要取决于卫星分布的几何图形和观测量的精度,DOP 值一般作为一个卫星导航的精度㊂δAccuracy =DOP ˑδUERE(30)UERE 是由时钟误差㊁电离层延迟等因素造成的偏差,更多地反映在天空卫星的空间分布上,由于卫星接收路径产生用户等效距离误差的标准偏差,距离越远,误差放大效应也会增大㊂DOP 值作为反应星座组合和轨道参数的数值,主要包括水平DOP (HDOP )㊁垂直DOP (VDOP )㊁位置DOP (PDOP )㊁时间DOP (TDOP )和几何GDOP ㊂其中几何精度因子GDOP 是由PDOP 和TDOP 的综合影响的精度因子,可通过以下公式计算求得㊂GDOP =PDOP 2+TDOP 2(31)PDOP =σ2x +σ2y +σ2zσURE(32)给定定位精度水平,可用性取决于卫星在特定位置和一天内的几何形状㊂定位精度的高低是由DOP 所能接受的最大值来决定的,所以卫星导航系统的可用性要看定位精度的高低㊂普遍规律是PDOP ɤ6作为可用性评价系统的依据㊂利用几何精度因子的功能可预测导航系统的可用性(CFA),这就相当于在使用导航服务要求定位精度满足一定的要求㊂然而,事实上,系统完整性对于某些应用领域,尤其是航空领域来说是一个关键问题㊂因此,对系统的可用性,除了考虑DOP 门槛要求外,还应考虑组合导航系统观测卫星数量较多㊁GDOP 下降㊁组合导航系统定位时可选择最优星座即GDOP 数值最小的星座等自主完好监测和故障检测排除能力,这将有效提高导航系统定位精度[5]㊂5㊀仿真验证部分㊀㊀算例1:以2016年新疆地基增强CORS 站测试数据为例,数据来源为北斗导航新疆地基增强系统㊂通过运用北斗卫星导航新疆地基增强系统,新疆地区的事后导航定位服务区域能够实现全覆盖,同时重点区域能够获得dm 级甚至cm 级高精度定位服务㊂通过对比,可以发现新疆地基增强CORS 站系统的实时定位精度达到了5cm 以上,而且其高程精度也达到了10cm 以上,事后静态定位精度也达到了5mm 以上,而且其高程精度也不低于10mm㊂而移动网络定位精度远低于北斗卫星导航增强系统定位精度㊂算例2:北斗与GPS 联合精密定位,能够获得更高精度且系统鲁棒性更好㊂定位结果如表3所示㊂表3㊀北斗㊁GPS㊁北斗&GPS 定位精度对比单位:cm观测值N E U 北斗17.917.130.5GPS3.04.17.0北斗+GPS 4.0 3.56.26㊀结语㊀㊀北斗定位系统是中国重要的信息基础设施,它的建立为中国在导航卫星领域的国际影响力奠定了坚实的基础㊂经过模拟验证,与传统的BDS 定位方法相比,北斗地基增强系统的静态定位和动态网络RTK 测量精度都能满足要求,而且,将BDS 技术整合起来,更能体现多卫星集成技术的优越性㊂BDS 网络RTK 定位技术已经取得了巨大的进步,它的不断改进将有助于北斗地基增强系统的发挥,为北斗导航卫星的发展和应用提供坚实的基础㊂参考文献[1]郭树人,刘成,高为广,等.卫星导航增强系统建设与发展[J ].全球定位系统,2019(2):1-12.[2]刘文建.北斗/GNSS 区域地基增强服务系统建立方法与实践[D ].武汉:武汉大学,2017.[3]赵俊天.新疆维吾尔自治区CORS 系统的建设与定位服务测试[D ].西安:长安大学,2017.[4]李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M ].武汉:武汉大学出版社,2009.[5]黄文德,康娟,张利云,等.北斗卫星导航定位原理与方法[M ].北京:科学出版社,2019.(编辑㊀沈㊀强)Design and test analysis of Beidou satellite navigation foundation enhancement systemXu Peng Zhao Wei Luo Wei Lan Wei Sang FeiUnit 61773 Urumqi 831100 ChinaAbstract This paper briefly reviews and summarizes the generation development history and evolution of the globalsatellite foundation enhancement system introduces the current situation of the Beidou satellite foundation enhancement system in China analyzes the error of the network RTK and the factors affecting the positioning accuracythen compares the Beidou satellite foundation enhancement system with the mobile network and the positioningaccuracy of the GPS system and explores the positioning effect of the Beidou system and GPS system.Key words Beidou positioning accuracy test ground -based enhancement system CORS system。
北斗地基增强系统建设实施方案

1.1构建地基增强系统地基增强系统是基于BD/GPS卫星定位技术、计算机网络技术、数字通讯技术等高新科技,通过在一定区域布设若干个GNSS连续运行参考基站(CORS),对区域GNSS定位误差进行整体建模,通过无线数据通讯网络向用户播发定位增强信息,提高用户的定位精度,且定位精度分布均匀、实时性好、可靠性高。
地基增强系统辅助空间卫星,可以显著或成倍提高定位和授时精度,可使终端的定位精度提高到米级以内。
地基增强系统由参考站、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五个部分组成,各基准站与监控分析中心间通过数据传输系统连接成一体,形成专用参考站网络,数据传输系统与定位导航数据播放系统共同完成通信传输。
北斗卫星地基增强系统是动态的、连续的空间数据参考框架,可快速、高精度的获取空间数据和地理特征,它也是区域规划、管理、决策的基础。
1.1.1建设原则北斗卫星地基增强系统建设将坚持技术先进、高效可靠、经济实用和易于扩展”的基本原则。
1)总体规划、分步实施系统建设中,应先行进行总体规划和设计,全盘考虑系统建设目标。
根据总体规划指导和要求,进行项目的分期建设的设计和实施,避免不合理的建设投入。
2)先进性系统拟采用的BDS/GPS技术融合了网络RTK技术和PPP技术的各自优势,充分借鉴了网络RTK和PPP技术的工作模式,因而其技术本身可具备以下优势:⑴北斗为主,兼容GPS GLONASS系统。
具有BDS独立组网进行高精度定位增强的能力,同时提供CGR三系统、CG双系统、CR双系统、GR双系统等4种组合定位增强模式,实现GEO/IGSO (高轨)卫星与MEO (GPS/GLONASS中圆轨道)卫星联合解算技术。
(2)区域网络RTK与广域PPP技术融合统一,区域CORS网内和网外用户采用同一套数据处理软件,相同的数据处理模式,实现区域增强与广域增强服务自动无缝切换,具有近海高精度定位增强服务能力。
北斗地基增强系统建设方案

北斗地基增强系统建设方案集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN#1.1构建地基增强系统地基增强系统是基于BD/GPS卫星定位技术、计算机网络技术、数字通讯技术等高新科技,通过在一定区域布设若干个GNSS连续运行参考基站(CORS),对区域GNSS定位误差进行整体建模,通过无线数据通讯网络向用户播发定位增强信息,提高用户的定位精度,且定位精度分布均匀、实时性好、可靠性高。
地基增强系统辅助空间卫星,可以显着或成倍提高定位和授时精度,可使终端的定位精度提高到米级以内。
地基增强系统由参考站、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五个部分组成,各基准站与监控分析中心间通过数据传输系统连接成一体,形成专用参考站网络,数据传输系统与定位导航数据播放系统共同完成通信传输。
北斗卫星地基增强系统是动态的、连续的空间数据参考框架,可快速、高精度的获取空间数据和地理特征,它也是区域规划、管理、决策的基础。
建设原则北斗卫星地基增强系统建设将坚持“技术先进、高效可靠、经济实用和易于扩展”的基本原则。
1)总体规划、分步实施系统建设中,应先行进行总体规划和设计,全盘考虑系统建设目标。
根据总体规划指导和要求,进行项目的分期建设的设计和实施,避免不合理的建设投入。
2)先进性系统拟采用的BDS/GPS技术融合了网络RTK技术和PPP技术的各自优势,充分借鉴了网络RTK和PPP技术的工作模式,因而其技术本身可具备以下优势:(1)北斗为主,兼容GPS、GLONASS系统。
具有BDS独立组网进行高精度定位增强的能力,同时提供CGR三系统、CG双系统、CR双系统、GR双系统等4种组合定位增强模式,实现 GEO/IGSO(高轨)卫星与MEO(GPS/GLONASS中圆轨道)卫星联合解算技术。
(2)区域网络RTK与广域PPP技术融合统一,区域CORS网内和网外用户采用同一套数据处理软件,相同的数据处理模式,实现区域增强与广域增强服务自动无缝切换,具有近海高精度定位增强服务能力。
北斗星基增强系统 标准

北斗星基增强系统标准
北斗星基增强系统是一种先进的导航技术,用于提高北斗卫星导航系统的精度和可靠性。
该系统采用了一系列基站和相关设备,用于接收北斗卫星的导航信号,并加以处理和增强。
北斗星基增强系统的标准是根据国家相关技术规范制定的。
它规定了系统的工作参数、功能要求、数据处理方式等内容,以确保系统能够稳定可靠地工作,并满足用户的导航需求。
在北斗星基增强系统中,基站通过接收北斗卫星的导航信号,测量信号的传播时间来计算用户接收机的位置和速度信息。
然后,基站将这些信息进行处理,并通过无线信号传输到用户的移动设备上。
除了提供高精度的导航定位服务外,北斗星基增强系统还可以提供定位辅助数据、差分修正信息等功能,以进一步提高导航的准确性和可靠性。
这些功能可以广泛应用于交通运输、航空航天、海洋渔业等领域。
北斗星基增强系统的标准确保了系统的一致性和互操作性,使得不同厂家生产的设备都能够无缝地进行互联互通。
同时,标准还规定了系统的数据安全保护措施,以防止信息泄露和非法使用。
总之,北斗星基增强系统的标准为用户提供了高质量的导航服务,为各个行业的发展提供了重要支撑。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1构建地基增强系统地基增强系统是基于BD/GPS卫星定位技术、计算机网络技术、数字通讯技术等高新科技,通过在一定区域布设若干个GNSS连续运行参考基站(CORS),对区域GNSS定位误差进行整体建模,通过无线数据通讯网络向用户播发定位增强信息,提高用户的定位精度,且定位精度分布均匀、实时性好、可靠性高。
地基增强系统辅助空间卫星,可以显著或成倍提高定位和授时精度,可使终端的定位精度提高到米级以内。
地基增强系统由参考站、数据处理中心、数据传输系统、定位导航数据播发系统、用户应用系统五个部分组成,各基准站与监控分析中心间通过数据传输系统连接成一体,形成专用参考站网络,数据传输系统与定位导航数据播放系统共同完成通信传输。
北斗卫星地基增强系统是动态的、连续的空间数据参考框架,可快速、高精度的获取空间数据和地理特征,它也是区域规划、管理、决策的基础。
1.1.1建设原则北斗卫星地基增强系统建设将坚持“技术先进、高效可靠、经济实用和易于扩展”的基本原则。
1)总体规划、分步实施系统建设中,应先行进行总体规划和设计,全盘考虑系统建设目标。
根据总体规划指导和要求,进行项目的分期建设的设计和实施,避免不合理的建设投入。
2)先进性系统拟采用的BDS/GPS技术融合了网络RTK技术和PPP技术的各自优势,充分借鉴了网络RTK和PPP技术的工作模式,因而其技术本身可具备以下优势:(1)北斗为主,兼容GPS、GLONASS系统。
具有BDS独立组网进行高精度定位增强的能力,同时提供CGR三系统、CG双系统、CR双系统、GR双系统等4种组合定位增强模式,实现 GEO/IGSO(高轨)卫星与MEO(GPS/GLONASS中圆轨道)卫星联合解算技术。
(2)区域网络RTK与广域PPP技术融合统一,区域CORS网内和网外用户采用同一套数据处理软件,相同的数据处理模式,实现区域增强与广域增强服务自动无缝切换,具有近海高精度定位增强服务能力。
(3)坐标同时兼容CGCS2000和WGS 84坐标系统。
(4)现有的GPS B 级点可以结合IGS 站点,实现CJK-CORS监测系统中的基准点的坐标联测的起算点。
3)可靠性(1)系统设计充分考虑系统运行的可靠性以及个BDS/GPS定位技术的可靠性。
从系统设备部署、基准站布网分布、系统软件自适应性及可靠性、合理高效的备份机制等方面,保证系统全天候、稳定正常运行;(2)系统设计以北斗信号为主,兼容GPS、GLONASS信号,对于GPS定位技术而言存在更多的冗余性,有利于提高定位的精度与可靠性。
对于北斗三星GPS CORS系统监测,其在扩展时间可用性的同时,能有效地缩短初始化时间。
(3)全方位的完好性监测方法和预警技术。
对导航星座、CORS基站、大气扰动、网络环境、硬件设备进行实时监测,面向系统决策层、系统管理员和终端用户各自不同的需求,建立相应的系统完好性参数化模型,实时发布完好性差分数据、监测数据和预警信息,提升系统服务的可靠性和完备性。
3)资源集约利用(1)利用一带一路周边现有的基站站可利用的设施,在其基础上扩展CORS 监测系统,尽量避免重复投资。
(2)在确保系统性能指标和质量不受影响的情况下,采用合理、节省的方法设计系统,尽可能节约工程建设总费用。
4.易用可扩展(1)系统设计要保证系统建成后易用性,包括系统管理、系统维护、用户应用的易用性,用户端实现简单培训后即可操作作业,管理端进行短期培训实习后可以进行系统管理和维护,避免人员变动而导致的损失。
(2)系统建设过程中,应充分考虑与如地震监测、测绘院等其他部门技术的融合,预留相关建设场地和数据处理接口,使系统建设完成后可按照用户需求后期扩展服务。
1.1.2建设目标系统遵循“立足测绘,服务一带一路”的总体目标:以一带一路重点区域沿线范围为主、以北斗为主体、兼容其他GNSS卫星、统一的多系统、高精度GNSS 地基增强系统网络。
通过在一带一路重点区域沿线范围内布设北斗地基增强参考站,建设覆盖一带一路重点区域的高精度增强定位系统,为国家一带一路战略提供空间基础数据。
可向系统覆盖区域内的用户提供各种不同精度的位置和时间信息服务,以满足一带一路建设规划、设计、施工、运营应用的定位、导航和时间服务的实际需求。
1)建立和维持新一代高精度的B控制网基础框架。
2)结合区域似大地水准面精化成果,向测绘及相关应用行业提供高精度、连续、动态、三维的空间坐标参考框架。
3)为现代测绘基准体系的建立和完善提供平面和高程基准基础设施,为空间技术的应用及其产业化服务提供基准保障。
4)基站为监测中心服务器提供原始数据,满足监测软件需求。
1.1.3建设内容1)改造/建设长一带一路连续运行基站接收设施;2)建立控制中心,基于现有资源,实现基准站到控制中心的实时传输并对各站点的数据进行质量检查、冗余的备份链接;对接入系统的基站数据进行同步并建立电离层、对流层模型;监控各基准站的运行,并实现服务与不同系统的实时数据共享;3)建设数据中心,存储不同采样间隔和不同时段的BDS/GPS 原始观测数据,存储包含的BDS/GPS 原始观测数据、存储网络模型文件、进行数据的质量检查和转换;4)建立一带一路服务中心,基于网页的用户管理系统;利用Internet向批准用户提供基准站原始观测数据下载服务;利用电台方式向一带一路地区用户提供实时RTK服务,同时为用户提供扩展的二次开发的接口;5)建立参考站和控制中心之间的通讯连接;6)监测基准站的站点位移情况;实时进行站点监测,定期(每季度)加入高等级控制点进行整网的解算,保障基准框架的稳定,建立数据平台;7)监测站点现场的温湿度;8)监测站点差分数据发射是否正常;9)监测站点BDS/GPS数据链的信号强度、站点BDS/GPS星空图;10)监测GPRS路由器的GPRS流量;11)建设常规RTK差分信息的发播系统。
1.1.4系统性能指标于3×网络RTK事后精密定位变形监测导航定时水平,垂直(平坝、丘陵),垂直(山区)水平,垂直水平,垂直单机精度,垂直水平,多机同步可用性定位95%(365天),95%(天)稳定性报警时间秒误报率兼容性定位导航原始GNSS数据格式采用RINEX格式,实时差分数据采用RTCM3.X格式,兼容各类接收终端及后处理软件卫星信号北斗B1、B2、B3L1C/A码L1/L2 P码扩展支持GLONASS LI L2接收机、终端国内主流GNSS接收终端用户容量实时用户GSM、GPRS、CDMA方式多用户同时使用事后处理用户无限制1.1.5系统组成北斗卫星地基增强系统的设计将按照严格的现代计算机网络的规范与标准。
整个系统是以参考站网为中心节点的星型网络。
建立在高速广域网(100M)上,网络采用TCP/IP协议,服务器操作系统采用Windows Server,基准站采用基于LINUX系统设计的专业网络基准站接收机。
参考网子系统:卫星定位数据跟踪、采集、传输、系统可靠性(完备性)监测。
控制中心子系统:接收并控制各基准站发回的数据。
检查各基准站工作状况;对数据进行分析、处理、存贮、管理。
形成一定格式的数据文件,发送给用户。
通信子系统:将基准站观测数据传到中心系统包括GNSS差分数据、定位数据实时发送给用户,通过Internet网络公共通讯网络、专用无线网络、电台发布GNSS数据。
用户终端子系统:包括高精度卫星接收机、手机、车载终端等GNSS信号接收,实时差分解算,事后处理解算。
1.1.6系统总体结构北斗卫星地基增强系统是以参考站中心为中心节点的星形网络。
中心建立在高速局域网的互联上。
主要由参考站网、通信网、控制中心以及用户部分组成。
系统的网络协议基于TCP/IP服务,参考站的接入主要使用光纤或有线数据网络。
中心服务器采用分布式部署方式结合多种先进架设、安装、防护、存储手段。
1.1.7系统流程系统数据流可以分为内部和外部数据流两类,内部数据流是指在连续运行参考站内部交换的流量数据,其主要特点是不不对外公开;外部数据流是连续运行参考站与系统用户之间进行交换的流量数据,这两类数据通过连续运行参考站的各个子系统进行交换处理。
1.1.8参考站分布设计根据《全球导航卫星系统连续运行参考站网建设规范》的要求,北斗卫星地基增强系统属于区域参考站网,按照区域参考站网的布设距离规定要求:实时定位精度:分米级厘米级参考站距离:50-150Km 20-80Km1.1.9参考站网系统参考站网系统是北斗卫星地基增强系统的数据源,用于实现对卫星信号捕获、跟踪,卫星数据的记录、传输。
为了满重点区域大部分地区用户能够得到厘米级网络RTK定位服务,实现高精度的定位能力。
基准站作为地面增强系统的重要组成部分,CORS基准站设计为无人职守型。
CORS基准站跟踪视野内的所有卫星,自主完成导航卫星数据的接收、采集、处理、存储、传输和自动监测报警以及远程控制与管理等功能。
其中导航卫星数据的接收、采集、处理、存储和传输是基准站必备的功能,而自动监测报警和远程控制与管理可根据系统建设的要求和实际情况来选择。
本系统中的基准站具备以下功能:(1)导航卫星数据的接收、采集和处理基准站接收北斗/GPS导航卫星信号,包括卫星广播星历、载波观测数据、C/A 码、P码和时钟数据等。
基准站接收机天线接收到的卫星信号需要经过解译后才能够用于导航定位。
经过解译后的卫星数据格式有TrimCom数据、TR17数据和TRCM数据等。
(2)导航卫星数据的传输基准站接收到的导航卫星信号并解译后,需要将数据实时传输到中心系统。
目前的基准站接收机自身带有网路传输通道(即从导航接收机到公网或专线通信线路的传输路径),可以直接将数据传输到网络,无需再配备计算机。
网络传输通道一般通过光纤协议转换器、VPN路由器和ADSL调制解调器等专用设备实现。
(3)导航卫星数据的存储基准站采集的数据实时传输到数据与服务中心,中心会对数据进行存储。
但是如果出现通信中断、基准站通信设备故障等意外情况,数据将无法传输到数据中心,这样会导致中心系统无法存储该时间段的卫星数据,从而影响后续的差分数据处理。
因此,基准站自身应具备存储卫星数据的能力。
当网络故障排除后,管理员可以通过手工操作的方法把缺失的观测数据从基准站下载并传输到中心系统进行存储。
(4)自动监测报警基准站监测报警功能指基准站在运行出现故障时,向中心系统发出报警信息,以供管理者决策。
导航接收设备运行状况的监控和报警一般由导航接收机自身或外接接收机向中心系统传输接收机和天线状态数据,包括接收机数据质量、卫星状态、数据完好性等。
当接收机运行出现异常时,接收机向中心系统发送警报,并同步发送故障信息。
电源运行状态通常通过UPS电源来远程监控。
供电出现异常时,UPS将向中心系统发送警报,并以文字形式说明异常信息。