AGV控制板卡的设计
agv设计方案
agv设计方案AGV(Automatic Guided Vehicle,自动导引车)是一种能够自主导行并完成货物搬运任务的智能机器人。
它通过内置的导航系统和传感器,能够感知环境并避开障碍物,实现无人化、自动化的运输。
下面,我将介绍一种AGV设计方案。
首先,AGV设计方案需要考虑导航系统。
可以采用激光导航技术,通过在AGV上安装激光传感器,实时感知周围环境,并绘制地图。
然后,利用SLAM(Simultaneous Localization and Mapping)算法,实现AGV在不同环境中的定位和路径规划,确保它能够准确导航。
其次,AGV设计方案需要考虑控制系统。
AGV可以通过中央控制系统进行远程控制和监控。
中央控制系统可以通过无线通讯与AGV进行实时连接,实现对AGV的运行状态监测、任务分配和路径优化,从而提高运输效率和准确性。
同时,AGV的设计方案需要考虑安全性。
AGV应该配备多种传感器,如红外传感器、超声波传感器等,以实现对周围环境的实时监测,并及时避开障碍物,避免碰撞。
此外,AGV还应该设置急停装置,一旦发生紧急情况,可以立即停止运行,确保人员和设备的安全。
此外,AGV设计方案还需要考虑能源系统。
可以利用可充电电池为AGV提供动力,而不需要外部电源供应。
同时,还可以设计电池充电系统,实现AGV的自动充电功能,确保其长时间的运行。
最后,AGV设计方案还需要考虑扩展性。
AGV应该具备可扩展性,可以根据需求扩充数量,并能够与其他智能设备进行联动,实现更高效的物流和生产管理。
总之,这种AGV设计方案通过激光导航技术、中央控制系统、多传感器安全保障、可充电电池能源系统以及可扩展性的考虑,实现了AGV的自主导行和货物搬运功能。
它在工业生产、仓储物流等领域具有广阔的应用前景。
agv设计标准
agv设计标准一、概述AGV,即自动导引车,是一种能够自动导航、运输物品的自动化设备。
本标准旨在为AGV设计提供规范和指导,确保其性能、安全性和稳定性。
二、设计原则1.高效性:AGV设计应考虑运输效率,合理规划路径和载具容量,以实现高效物流运输。
2.安全性:AGV应具备安全防护功能,如急停、防撞等,以避免意外事故的发生。
3.稳定性:AGV应具备稳定的导航和控制系统,以确保其在复杂环境中稳定运行。
4.可维护性:AGV应设计易于维护的结构和接口,降低后期维护成本。
三、主要组件及设计要求1.驱动系统:驱动系统应采用适合的电机和减速机,确保载具速度可控、运行平稳。
2.导航系统:导航系统应采用适合的传感器和算法,如激光雷达、惯性传感器等,实现精准定位和导航。
3.控制系统:控制系统应采用适合的硬件和软件,确保AGV按照预设路径和指令运行,同时具备故障自救功能。
4.承载结构:承载结构应具备足够的强度和刚度,确保AGV在运输过程中不发生变形和损坏。
5.安全防护装置:应设置安全防护装置,如限位器、障碍物传感器等,以避免人员和物品伤害。
四、外观与颜色规范1.AGV外观应简洁、大方,与品牌形象相符。
2.颜色选择应与企业品牌色一致,以增强品牌辨识度。
五、技术参数与性能指标1.最大行驶速度:应满足不同应用场景的需求,合理设定最大行驶速度。
2.行驶路径精度:应确保AGV在规定路径内的精度,以满足物流运输的要求。
3.载重能力:应根据实际应用需求,合理设定载重能力,以降低成本并提高运输效率。
4.电池续航能力:应考虑实际应用场景和运输距离,选择适合的电池类型和容量,确保AGV在规定时间内正常工作。
5.工作环境适应性:应考虑AGV对不同环境(如温度、湿度、尘土等)的适应性,以确保其在各种环境下稳定运行。
六、测试与验收标准1.AGV在出厂前应进行全面的性能测试,确保各项指标符合设计标准。
2.在投入使用前,应对AGV进行实地测试,验证其性能和稳定性。
固定路径自动引导车(AGV)的控制系统设计

固定路径自动引导车(AGV)的控制系统设计摘要随着工厂自动化、计算机集成制造系统技术的逐步发展以及柔性制造系统、自动化立体仓库的广泛应用,AGVA(utomatieGuidedVehiele)即自动导引车作为联系和调节离散型物流系统以使其作业连续化的必要的自动化搬运装卸手段,其应用范围和技术水平得到了迅猛的发展。
AGV是以微控制器为控制核心、蓄电池为动力、装有非接触导引装置的无人驾驶自动导引运载车,其自动作业的基本功能是导向行驶、认址停准和移交载荷。
作为当代物流处理自动化的有效手段和柔性制造系统的关键设备,AGV已经得到了越来越广泛的应用,对AGV的研究也具有十分重要的理论意义和现实意义。
发展现状作出综述,系统地分析了自动导引车的特点、类型和技术组成,并对关键技术加以进一步的说明.本课题设计了一辆自动导引车,进行了系统总体设计,利用反射式光电红外收发管作为AGV(Automated Guided Vehicle)寻航检测装置,蓄电池和直流马达作为驱动装置,舵机作为方向控制装置,用单片机作为控制器来控制各个模块协同工作,以实现自动导引车自动导航。
关键词:单片机,AGV,红外传感器,PIDA fixed path Automatic Guided Vehicle (AGV) control systemdesignAbstractAs the factory automation, computer integrated manufacturing systems technology, as well as the progressive development of flexible manufacturing systems, automated warehouse extensive use, AGVA (utomatieGuidedVehiele) is automatically guided vehicle as an associate and regulation of discrete logistics system to make it necessary for continuous operation automated transport loading and unloading means, its scope of application and level of technology has seen rapid development.AGV is a micro-controller to control the core, battery-powered, equipped with a non-contact guiding devices, unmanned automatic guided transport vehicles, its automatic operation’s basic function is to guide traffic and identifying potential sites and the transfer of load to stop。
AGV控制架构图
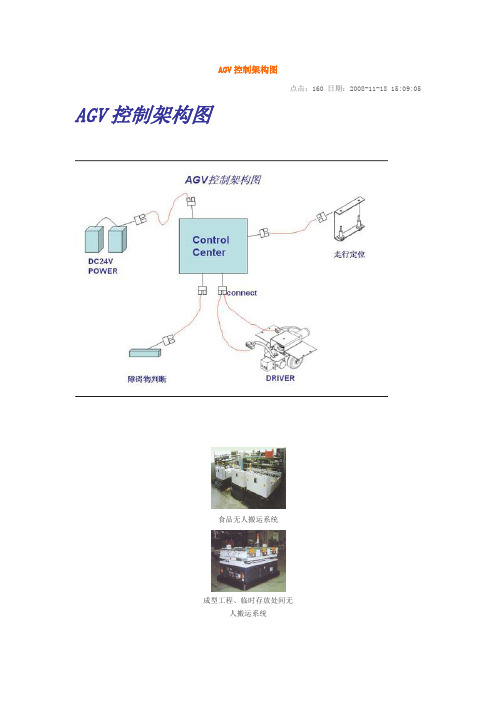
AGV控制架构图点击:160 日期:2008-11-18 15:09:05 AGV控制架构图食品无人搬运系统成型工程、临时存放处间无人搬运系统组装零件台车无人搬运系统农业仓库包装袋无人搬运系统滚筒无人搬运系统搬运机器人(AGV)现状综述(2007-10-23 19:46:37)标签:知识/探索一概述自从1913年美国福特汽车公司使用有轨底盘装配车,1954年英国采用地下埋线电磁感应导向车以来,到九十年代全世界拥有AGV(Automated Guided V ehicles)10万台以上。
近年来,自动化技术呈现加速发展的趋势,国内自动化立体仓库和自动化柔性装配线进入发展与普及阶段。
其中,在自动仓库与生产车间之间,各工位之间,各段输送线之间,AGV 起了无可替代的重要作用,与传统的传送辊道或传送带相比,AGV输送路线具有施工简单、路径灵活,不占用空间、较好的移动性、柔性等优点。
有了这样的生产过程,就会得到稳定的高质量产品和井井有条的生产环境;工作人员会把精力放在人所擅长的方面,比如监督,在发生问题的时候采取适当的措施,或其它需要灵活处理事情,简单地说,就是思考。
简练生产制,准时生产制,大规模定做制-这些现代化的生产哲学概念制造了对AGV的大量需求。
二AGV系统技术发展(1)导引技术:八十、九十年代,正当国内的一些院校厂所致力基于埋线电磁导引技术并刚开始应用,基于CCD的光学磁带识别、周边图像识别导引技术停滞不前之时,美国则以汽车行业为代表,应用推广了基于陀螺导航的定位技术;瑞典的NDC公司则推出了基于激光反射测角定位技术。
近年来,出现了激光测角与测距相结合的导引技术,其导引头已经商品化。
导引技术的进步,提高了行程路径的柔性化,同时提高了停位精度,由±10毫米,缩小至±5毫米,乃致±3毫米。
GPS定位导航技术则在大型(最大可达40t)AGV上得到应用。
(2)移载技术:针对不同应用需求,出现了背辊式,背链式,推挽式,牵引式,龙门式,侧叉式、前叉式、后叉式、三向叉式、升降伸缩叉式等。
AGV自动导航车控制系统的设计与改进

AGV自动导航车控制系统的设计与改进AGV(Automatic Guided Vehicle)自动导航车是一种能够在工业环境中自动导航、运载物料的无人驾驶车辆。
AGV自动导航车控制系统的设计与改进,是为了提高生产效率,减少人工操作,实现自动化和智能化生产。
首先,AGV自动导航车的控制系统需要设计一个可靠的定位系统,以确定车辆的准确位置。
传统的定位方法包括激光导航、磁导航和视觉导航等,但这些方法都存在一定的局限性。
为了解决这个问题,可以采用多传感器融合的方法,结合使用激光、磁导航和视觉等多个传感器,提高定位的准确性和可靠性。
其次,AGV自动导航车的控制系统需要设计一个路径规划算法,以确定车辆的最佳路径。
传统的路径规划算法包括A*算法和Dijkstra算法等,但这些算法的计算复杂度较高,无法满足实时性的要求。
为了解决这个问题,可以采用快速路径规划算法,如D*算法和RRT算法等,减少路径规划的计算时间。
此外,AGV自动导航车的控制系统还需要设计一个动态避障算法,以确保车辆能够避免障碍物。
传统的避障算法包括静态避障算法和动态避障算法,但这些算法在遇到复杂环境时无法处理。
为了解决这个问题,可以采用深度学习算法,如卷积神经网络(CNN)和循环神经网络(RNN)等,实现车辆的智能避障。
此外,AGV自动导航车的控制系统还可以设计一个自适应控制算法,以应对不同工作场景下的变化。
自适应控制算法可以根据工作场景的变化,调整车辆的速度、加速度和转向角度等,使车辆能够更好地适应工作场景的变化,提高车辆的运行效果。
最后,AGV自动导航车的控制系统还需要设计一个远程监控和调度系统。
远程监控和调度系统可以实时监控车辆的运行状态和位置,并对车辆进行操作和调度,提高车辆的运行效率和生产效率。
总之,AGV自动导航车控制系统的设计与改进是一个综合性的工程,需要考虑定位、路径规划、避障、自适应控制和远程监控等多个方面,以实现自动化和智能化生产。
AGV观光车运行控制系统设计毕设说明书
AGV观光车运行控制系统设计摘要AGV即自动导引小车,指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。
一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴于地板上,自动导引车则依循电磁轨道所带来的讯息进行移动与动作。
本次设计完成原车的总体结构分析和电路图的绘制,在原车的基础上融入新的自动控制系统,选定以单片机微控制器的作为核心进行运动控制系统设计。
设计过程如下: 首先,搜集关于AGV的资料,了解AGV的国内外发展现状及趋势,对课题有一个明确的把握,同时熟悉电动车的驱动系统原理及其控制方式,掌握本课题设计中所用到的辅助软件并能熟练使用;其次,通过对原车相关资料的学习及对车体必要的拆卸,对原车进行总体结构分析,包括车的主要部件构成,各部件作用及相互之间的连接关系。
在此基础上,通过对线路的实际观察、电流检测及线路去向检测,绘制出原车的总体电路图,从而对该观光车的构造有较全面的认识,并对下一步的改造设计打好基础;再次,设计电机驱动部分.本次设计中包含两种电机,驱动电机和转向电机,要能够实现小车的前进、后退、停止,及转向角度的控制,转向需要编码器作为角度测量反馈.驱动电机上装有旋转编码器,能对小车的速度进行实时检测;最后,CAN总线传输设计.确定CAN信息格式,本车作为CAN接收时,接受上位机控制指令,作为发送器时,发送本车运行状态参数.关键词:AGV,电动车,单片机,伺服驱动,转向控制,速度检测,CAN通信The Design of Servo Operation Control System of AGVSightseeing VehicleABSTRACTAGV automatic guided vehicles,equipped with electromagnetic or optical automatic guiding device, such as can be guided by the along a prescribed path,with security protection as well as a variety of transfer function of transporters,industrial applications do not need the driver's truck, with the rechargeable battery as its power source。
计算机控制自动导向小车(AGV)的设计与实现

计算机控制自动导向小车(AGV)的设计与实现计算机控制自动导向小车(AGV)的设计与实现一、引言近年来,随着工业自动化程度的提高,自动导向小车(Automated Guided Vehicle,简称AGV)在物流和生产线等领域得到了广泛应用。
AGV通过计算机控制实现智能导航和自动定位,具有工作效率高、成本低、灵活性好等优点,成为现代制造业中不可或缺的重要工具。
二、AGV系统架构1. 机械硬件:小车平台、驱动系统、传感器等组成物理框架。
2. 电气控制:电机驱动、位置测量、通信等关键电气元件。
3. 软件系统:控制算法、路径规划、决策逻辑等软件部分。
三、AGV导航技术1. 路标导航:在地面铺设路标或磁条,小车通过感应器读取路标信息实现位置定位和导航。
2. 惯性导航:利用加速度计、陀螺仪等惯性传感器感知小车的位姿变化,计算位姿信息并实现导航。
3. 视觉导航:利用摄像头采集环境图像,通过图像处理和识别算法实现导航和避障。
4. 激光导航:借助激光雷达感知环境,通过测量距离和位置实现导航。
四、AGV控制系统设计1. 功能设计:根据实际需求和使用场景确定小车的功能,如载货、拆卸、挤压等。
2. 系统模块设计:将功能分解为多个模块,如导航模块、路径规划模块、障碍物避免模块等。
3. 控制算法设计:根据不同导航技术选择相应的算法,如PID控制、遗传算法等。
4. 通信模块设计:实现小车与上位机、其他设备的通信,通过发送和接收指令实现控制。
五、实验与结果分析在实验中,我们设计了一个基于激光导航技术的AGV系统。
首先进行硬件组装,包括激光雷达的安装、电机驱动系统的安装等。
然后进行软件程序编写,包括传感器数据的读取、导航算法的实现等。
最后进行实验测试,通过设定目标点和路径规划,验证系统对于导航和避障的性能。
实验结果表明,我们设计的AGV系统能够准确地实现导航和避障功能。
激光雷达能够精确感知环境,路径规划算法能够高效地确定最佳路径,并通过电机驱动系统控制小车进行移动。
AGV自动导航车控制系统的设计与改进

AGV自动导航车控制系统的设计与改进AGV(Automated Guided Vehicle)自动导航车是一种用于物料运输和自动化生产的设备,其控制系统设计和改进对于提高AGV的性能和效率至关重要。
下面将介绍AGV控制系统的设计和改进,并提出一些关键的考虑因素和建议。
首先,AGV控制系统的设计应考虑以下几个关键因素:1.导航技术:AGV的导航技术可以使用多种方法,如激光导航、视觉导航、磁导航等。
根据实际需求和环境条件选择最适合的导航技术。
同时,控制系统应提供可靠的定位和导航算法,以实现精准的路径规划和导航功能。
2.避障系统:AGV在工作过程中需要避免碰撞障碍物,因此控制系统应配备可靠的避障算法和传感器。
例如,可以使用红外线、超声波或激光传感器来检测环境中的障碍物,并通过控制系统中的避障算法实时调整AGV的路径。
3.通信系统:AGV与其他设备和系统之间需要进行数据交互和通信,因此控制系统应具备稳定的通信功能。
可以使用无线网络或有线网络实现与其他设备的连接,同时控制系统应提供可靠的数据传输和通信协议,以保证数据的实时性和准确性。
其次,对于AGV控制系统的改进,可以考虑以下几个方面:1.系统集成:AGV控制系统一般包括导航、避障、通信、路径规划等功能,可以将这些功能进行系统集成,以减少系统的复杂性和提高系统的性能。
例如,可以使用嵌入式系统来实现多个功能的集成,以提高系统的灵活性和效率。
2.自动调整和路径优化:AGV在工作过程中可能会出现路径偏差或时间延迟等问题,可以通过控制系统进行自动调整和路径优化,以提高AGV的导航精度和运行效率。
例如,可以根据实际情况对路径进行动态调整和优化,以避免不必要的行驶距离和时间浪费。
3.传感器和算法的改进:控制系统的性能和效率很大程度上取决于传感器和算法的质量和可靠性。
因此,可以对传感器进行升级或改进,以提高对环境的感知能力;同时,可以对算法进行改进和优化,以提高AGV的导航和避障能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目:AGV控制板卡的设计学生姓名高志伟学号200715010133班级电气071501所属院(系)电子信息工程学院指导教师刘红兵2011年6月16日太原科技大学毕业设计(论文)任务书学院(直属系):电子信息工程学院时间:2011年3月15日学生姓名高志伟指导教师刘红兵设计(论文)题目AGV控制板卡的设计主要研究内容1、了解AGV控制系统的结构2、掌握单片机原理及应用3、掌握模拟滤波和数字滤波4、学习C语言编程5、了解单片机硬件、软件的设计方法研究方法理论分析、硬件设计、软件设计、系统调试主要技术指标(或研究目标)1、设计一个单片机信号采集卡2、16路模拟量输入信号、带隔离放大3、8路模拟输入信号、带多路转换、光电隔离4、设计LED数码动态显示电路,用于指示各回路的工作状态5、编制相关的应用程序教研室意见教研室主任(专业负责人)签字:年月日目录摘要 (III)第1章绪论 (1)1.1论文研究的背景及意义 (1)1.2自动导引小车的定义及特点 (2)1.3AGV的导引方式 (3)1.4自动导引小车的发展简史 (4)1.5自动导引小车的应用现状 (6)1.6AGV的关键技术及本论文的研究内容 (7)1.6.1自动导引小车的关键技术 (7)1.6.2本论文研究的主要内容: (7)1.7本章小结 (8)第2章AGV结构简介及板卡概述 (9)2.1控制系统的分类 (9)2.1.1嵌入式控制系统 (9)2.1.2顺序控制系统 (9)2.1.3过程控制系统 (9)2.2AGV结构简介 (10)2.3AGV的系统组成 (11)2.4认识板卡 (12)2.4.1什么是板卡 (12)2.4.2数据采集卡 (12)第3章AGV控制板卡的主要元件选取 (15)3.1单片机的选取 (15)3.1.180C51系列单片机 (15)3.1.2TMS320 (19)3.1.3PIC (19)3.1.4AVR (20)3.1.5ARM (21)3.1.6单片机的选取 (22)3.2通讯接口的选择 (22)3.3其它元器件的选取 (23)第4章系统设计 (24)4.1设计方法说明 (24)4.2系统类型 (25)4.3系统原理设计 (25)4.3.1最小系统的设计 (25)4.3.2存储器扩展 (26)4.3.3LCD模块和I/0模块 (27)4.3.4通信接口电路设计 (29)4.4.5PCB图 (30)4.4编程软件 (32)第5章软件设计 (34)5.1程序设计语言概述 (34)5.1.1机器语言 (34)5.1.2汇编语言 (34)5.1.3高级语言 (34)5.2AGV控制板卡的C语言程序设计 (35)5.3Proteus仿真软件简介 (42)5.4仿真设计 (42)第6章系统分析 (44)第7章结论 (48)参考文献 (49)致谢 (50)AGV控制板卡的设计电子信息工程学院电气071501高志伟指导教师:刘红兵摘要:文中介绍了AGV的发展简史、前景、应用现状,结构组成和数据采集板卡控制系统的分类和应用,主要元器件的选取,重点讲述了单片机的选取,系统设计包括系统原理设计,PCB原理图设计,仿真设计,调试和程序编程。
最后对系统进行了分析。
关键词:板卡;STC89C52单片机;数据采集;PCB;C语言The Design of AGV Control BoardCollege of electronics and information engineering Electrical Major071501Zhiwei Gao Director:Hongbing LiuAbstract:This paper introduces AGV’s brief development history,the prospects, application and the structure components.It also discusses the classification and the application of data acquisition boards,and the selection of main components, highlighting the selection of the MCU.The system design includes the system principle design,the PCB principle diagram design,the simulation design, debugging and programming.At last the thesis makes an analysis of the system.Key words:board;STC89C52MCU;Data acquisition;PCB;C language第1章绪论内容提要:本章介绍本论文研究的重要意义,综述自动导引小车的基本概念、组成及其发展简史、应用现状和前景,并分析目前自动导引小车的主要引导方式、关键技术,在此基础提出了本论文的研究内容。
1.1论文研究的背景及意义21世纪制造业将进入一个新阶段,敏捷制造将成为企业的主导模式。
能否抓住市场机遇开发出新产品将是企业赢得竞争的主要手段。
要减小生产成本对生产批量的依赖,就要发展敏捷制造装备。
繁重制造装各的可编程、可重组和快速响应能力使得在进行小批量生产时,可实现接近中、大批量生产的效率。
由于机器人具有自主规划、可编程、可协调作业和基于传感器控制等特点,它将成为可重组的敏捷制造生产装备及系统的重要组成部分,为传统制造企业向敏捷制造企业跨越发展提供重要的技术支持。
自动导向小车((Automated Guided Vehicle 简称AGV)是移动机器人的一种,是现代制造企业物流系统中的重要设备,主要用来储运各类物料,为系统柔性化、集成化、高效运行提供了重要保证。
AGV以轮式移动为特征,较之步行、爬行或其它非轮式的移动机器人具有行动快捷、工作效率高、结构简单、可控性强、安全性好等优势。
与物料输送中常用的其他设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。
在以往的生产线上,导向式AGV是人们经常采用的方式,有激光式、声波式、磁导引式等方法。
这些方法都需要预先规划好AGV的运行路线,而且生产车间的装置不能随意移动。
随着生产车间智能化的提高,导向式AGV明显降低了AGV的柔性。
因此,非导向式AGV将成为敏捷制造物流系统中的主要选择。
在非导向式AGV系统中,AGV的运行路径不需要由附加设备决定,而且当车间的布局变化后,只要及时改变规划系统的软件参数即可满足路径规划要求。
资料显示:在产品生产的整个过程中,仅仅有5%的时间是用于加工和制造,剩余的95%都用于储存、装卸、等待加工和输送:在美国,直接劳动成本所占比例不足生产成本的10%,且这一比例还在不断下降,而储存、运输所占的费用却占生产成本的40%.因此,目前世界各工业强国普遍把改造物流结构、降低物流成本作为企业在竞争中取胜的重要措施,为适应现代生产的需要,物流正在向着现代化的方向发展。
自动导引小车AGV适应性好、柔性程度高、可靠性好、可实现生产和搬运功能的集成化和自动化,在各国的许多行业都得到广泛的应用。
AGV从发明至今,其种类和形式变得多种多样,其应用领域也不断扩展。
AGV 作为一种成熟的技术和产品,对企业提高生产效率、降低成本、提高产品质量、提高企业的生产管理水平起到了显著的作用。
目前,在我国某些汽车、烟草行业,AGV已投入使用,并取得了良好的经济效益。
但从使用形式来看,大都采用属于固定路径导向范畴的电磁导引AGV,无固定路径自主导向的AGV由于诸多问题未能完全解决,还没有达到实用。
AGV在我国的应用中突出的问题是:第一,应用普及率低;第二,科技含量较低;第三,AGV 价格居高不下,使用成本大。
1.2自动导引小车的定义及特点根据美国物流协会定义,AGV是指装备有电磁或光学自动导引装置,能够沿规定的导引路径行驶,具有小车编程与停车选择装置、安全保护以及各种移载功能的运输小车。
AGV是以电池为动力、装有非接触导向装置,独立寻址系统的无人驾驶自动运输车。
AGV是自动导引车系统,它由若干辆沿导引路径行驶,独立运行的AGV组成。
AGV在计算机的交通管制下有条不紊地运行,并通过物流系统软件而集成于整个工厂的生产监控与管理系统中。
应用AGV具有很多特点:(1)AGV可十分方便地与其它物流系统实现自动连接,如AS/RS(通过出从库台)、各种缓冲站、升降机和机器人等;实现在工作站之间对物料进行跟踪;对输送进行确认;按计划输送物料并有执行检查记录:与生产线和库存管理系统进行在线连接以向工厂管理系统提供实时信息。
(2)采用AGV由于人工检取与堆置物料的劳动力减少,操作人员无需为跟踪物料而进行大量的报表土作,因而显著提高劳动生产率。
另外,非直接劳动力如物料仓库会计员、发料员以及运货车调度员的工作的减少甚至完全取消又进一步减低了成本。
(3)AGV运输物料时,很少有产品或生产设备的损坏,这是因为AGV按固定路径行驶,不易与加工设备和其他障碍物碰撞。
(4)绝大多数AGV的使用者均证明,2到3年从经济上均能收回AGV的投资成本。
(5)AGV通过安装在地面之下的电缆或其他不构成障碍的地面导引物,其通道必要时可作其他用处。
(6)系统具有极高的可靠性。
AG由若干台小车组成,当一台小车需要维修时,其它小车的生产率不受影响并保持高度的系统可利用性。
(7)节约能源与保护环境。
AGV的充电和驱动系统耗能少,能量利用率高,噪音极低对制造和仓储环境没有不良影响。
1.3AGV的导引方式AGV按照不同的导引方式可以划分为:激光导引,电磁导引,磁条导引,惯性导引,GPS导引等。
(1)激光导引在AGV行驶路径周围预先垂直设置好一系列反光板,AGV上装的激光扫描器不断扫描周围环境,当扫描到反光板时,扫描器就能感知。
只要扫描到三个以上的反光板,就可以根据反光板的坐标值以及各反光板的法线和纵向轴的夹角,由控制器计算出AGV当前的全局坐标系中的坐标,以及行驶方向与X轴的夹角,达到准确定位和定向。
该种方式的优点是投入使用简单,容易扩充,灵活性好,并且提供了任意路径规划的可能性,适用于室内外场地,不受气候的影响。
激光导引原理:1.AGV的初始位置计算AGV小车停止不动;激光扫描器至少可测得4条光束,即至少“看到”4条反射板;已知所有反射板的精确位置(X,Y)。
2.AGV的连续位置计算根据运动模型估算小车的当前位置;根据估算的新位置关联反射板;根据关联的反射板修正自身位置,据此修正AGV下一步动作。