块状物品推送机的机构综合与结构设计
推杆推出机构的设计原理

推杆推出机构的设计原理
推杆推出机构的设计原理主要通过推杆的力学原理来实现。
推杆推出机构一般由推杆、导轨、挡块等部件组成。
设计原理如下:
1. 推杆设计:推杆是推出机构的核心部件,设计时需要考虑其材料和形状。
材料应具有足够的强度和硬度,以承受推动力和摩擦力的作用。
形状设计应考虑推动力的传递和转化效率,一般选择圆柱形或方形。
2. 导轨设计:导轨用于引导推杆的运动轨迹,保持推杆的稳定性和方向性。
导轨的设计应满足推杆的移动要求,一般选择直线导轨。
导轨的材料应具有较小的摩擦系数,以减小能量损耗。
3. 挡块设计:挡块用于限制推杆的运动范围,保证推杆推出机构的推动效果。
挡块的设计应考虑其位置和形状,以确保推杆在推动过程中不会受到不必要的干扰或撞击。
4. 摩擦减小设计:推杆推出机构在运动过程中会产生摩擦力,影响推动效果。
为减小摩擦力,可以采取以下设计措施:选择低摩擦材料、增加润滑剂、优化推杆和导轨的配合精度等。
5. 动力传递设计:推杆推出机构的推动力来源于外部动力,如液压、电动等。
在设计时需要考虑动力传递的效率和稳定性,选择合适的动力传递方式和装置。
总之,推杆推出机构的设计原理主要包括推杆设计、导轨设计、挡块设计、摩擦减小设计和动力传递设计。
通过合理的设计和优化,可以实现推杆的稳定、高效地推动机构的推出。
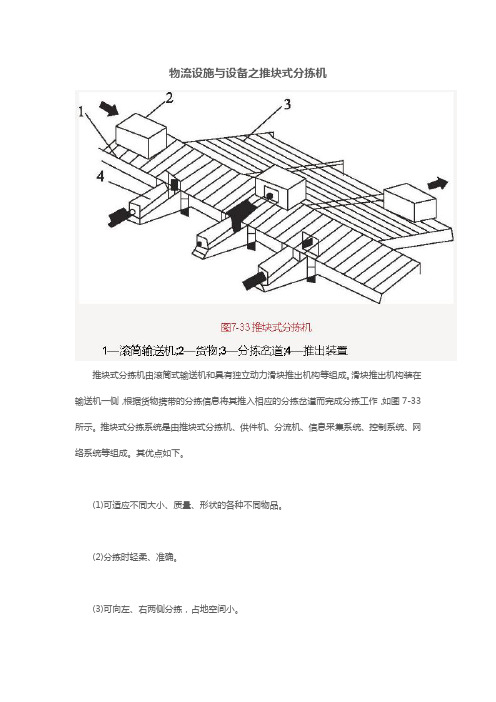
物流设施与设备之推块式分拣机
物流设施与设备之推块式分拣机
推块式分拣机由滚筒式输送机和具有独立动力滑块推出机构等组成。
滑块推出机构装在输送机一侧,根据货物携带的分拣信息将其推入相应的分拣岔道而完成分拣工作,如图7-33所示。
推块式分拣系统是由推块式分拣机、供件机、分流机、信息采集系统、控制系统、网络系统等组成。
其优点如下。
(1)可适应不同大小、质量、形状的各种不同物品。
(2)分拣时轻柔、准确。
(3)可向左、右两侧分拣,占地空间小。
(4)分拣时所需物品间隙小,分拣能力高达18000件小时。
(5)机身长,最长达110米,出口多。
机械综合机构设计方案

机械综合机构设计方案机械综合机构是一个集合了多个机械元件和机械连接件的整体结构,用于完成特定的运动或功能。
本设计方案将介绍一个机械综合机构的设计方案,包括设计目标、结构布局、工作原理和设计步骤等。
1. 设计目标本设计方案的目标是设计一个能够完成特定任务的机械综合机构,具备高效、可靠、稳定的工作特性,并且能够满足相关的性能要求。
2. 结构布局机械综合机构的结构布局可以根据具体任务的要求进行设计。
通常包括输入部分、传动部分和输出部分。
输入部分负责接收外部输入的动力或输入力,并将其传递给传动部分。
传动部分负责将输入力进行传递和转换,并将其传给输出部分。
输出部分负责完成特定的任务,将输出力或输出动能传递给所需的工作部件。
3. 工作原理机械综合机构的工作原理可以通过分析输入与输出的关系和传动的方式来进行理解。
通过适当的机械元件和机械连接件的组合和布置,实现输入力或输入动能到输出力或输出动能的转换。
4. 设计步骤(1) 确定机械综合机构的任务需求和性能要求。
(2) 设计输入部分,确定输入方式和输入力或输入动能的传递路径。
(3) 设计传动部分,选择适当的机械元件和机械连接件,并进行传动比的计算和传动方式的选择。
(4) 设计输出部分,确定输出力或输出动能的传递路径,并将其传递给所需的工作部件。
(5) 进行结构布局和尺寸设计,确保机械综合机构的强度和刚度满足要求。
(6) 完成详细的工程设计和图纸制作。
通过以上的设计步骤和相关的分析,我们可以得到一个满足需求和性能要求的机械综合机构设计方案。
在设计过程中要考虑到结构的合理性、工作的可靠性和稳定性,并保证设计的实施性和可制造性。
同时,还要进行相关的计算和分析,确保设计方案的可行性和优化性,通过进一步的实验和测试,验证设计方案的有效性。
推出机构的设计要点

推出机构的设计要点篇一《了解需求,确定基础方向》咱就说这推出机构的设计啊,那可不像搭积木那么简单,得讲究不少要点呢。
我就给大家讲讲我之前经历过的一件事儿,老有意思了。
有一回,我那公司接了个活儿,要给一家玩具厂设计个推出机构,专门用来把做好的小玩具从模具里弄出来。
刚接到这任务的时候啊,我心里还挺美的,想着不就是个推出机构嘛,小意思。
可等我真正去了解需求的时候,才发现这里面的门道多着呢。
我就跑到那玩具厂去实地考察,一到那儿,好家伙,那车间里那叫一个热闹,各种机器嗡嗡响,工人师傅们忙得不可开交。
我就去找负责这个事儿的师傅,让他给我讲讲具体要求。
他就跟我念叨起来,说这玩具啊,大小形状都不一样,有的还特别脆弱,稍微使点劲儿就容易坏了。
而且啊,这生产速度还得快,可不能耽误工夫。
听他这么一说,我才意识到这事儿不简单啊。
咱这推出机构的设计,首先得根据不同玩具的特点来啊。
太小的玩具,推出的力度就得小点儿,还得精准,不然一下子给推飞了那就麻烦啦;大点儿的玩具呢,力度就得大点,但还不能把玩具给弄变形了,这就好比照顾小孩似的,得拿捏好那个分寸。
经过几天的琢磨和计算,我初步确定了设计方向。
根据玩具的尺寸、重量、材质等因素,设计出了一套可以调节推出力度和方向的机构。
比如说,有个小玩偶,身体软软的,那我设计的推出机构就会轻轻地把它从模具里推出来,就像妈妈温柔地抱起宝宝一样;要是个比较结实的大玩具车,那推出的力度就会稍微大一点,就像大力士搬东西似的,但也不会太猛。
反正啊,就是得具体问题具体分析,根据实际需求来确定设计的基础方向,这样咱这推出机构设计出来才能好用。
篇二《注重细节,优化设计方案》推出机构设计这事儿啊,光确定了方向还不够,细节那也得把握好,这我可是深有体会的。
还说刚才那玩具厂的事儿啊。
我把初步设计方案给厂里的师傅们一看,原本以为他们会夸我设计得好呢,没想到他们提出了一堆意见。
比如说,这推出机构在工作的时候,会产生一些震动和噪音。
推料机械设计实训报告范文

一、实训目的本次推料机械设计实训旨在通过实践操作,将所学的机械设计理论知识与实际应用相结合,提高动手能力、创新意识和团队协作能力。
通过对推料机械的结构设计、运动分析、强度校核和优化设计等环节的实训,使学生掌握推料机械的设计方法,提高解决实际工程问题的能力。
二、实训内容1. 推料机械概述推料机械是物料搬运设备的一种,主要用于将物料从一定高度推送到指定位置。
其特点是结构简单、操作方便、运行稳定。
本实训所设计的推料机械主要用于将散状物料从料仓中推送到输送带上。
2. 推料机械结构设计(1)总体结构设计推料机械主要由推料装置、驱动装置、支架、电气控制系统等组成。
其中,推料装置是核心部件,负责将物料从料仓中推出。
驱动装置用于提供推料装置所需的动力。
支架用于支撑整个推料机械。
电气控制系统用于控制推料机械的启动、停止和运行速度。
(2)推料装置设计推料装置采用摆线针轮减速机驱动,减速机输出轴通过联轴器与推料装置的推杆连接。
推杆采用圆盘式结构,其上装有多个推杆头,用于将物料推出。
推杆头采用耐磨材料制造,以提高使用寿命。
(3)驱动装置设计驱动装置采用电机直接驱动,电机输出轴通过联轴器与减速机输入轴连接。
电机选用变频调速电机,以满足不同运行速度的需求。
(4)支架设计支架采用焊接结构,主要由立柱、横梁、斜撑等组成。
支架应具有足够的强度和刚度,以保证推料机械在运行过程中的稳定性。
3. 推料机械运动分析通过对推料机械的受力分析和运动学分析,确定推料装置的运动轨迹和运动速度。
具体分析如下:(1)受力分析推料装置在运动过程中,主要受到重力、摩擦力和推力三个力的作用。
其中,重力作用于物料,摩擦力作用于推杆与料仓壁之间,推力作用于推杆头。
(2)运动学分析根据受力分析,可得到推料装置的运动学方程。
通过方程求解,得到推杆的运动轨迹和运动速度。
4. 推料机械强度校核根据推料机械的结构和受力情况,对推料装置、驱动装置和支架进行强度校核。
具体校核如下:(1)推料装置强度校核根据推杆头受到的推力、摩擦力和重力,对推杆头的强度进行校核。
滑块分拣机原理

滑块分拣机原理
滑块分拣机是一种自动化分拣设备,它可以将物品按照一定的规则进行分类和分拣。
滑块分拣机的原理是利用滑块的运动来实现物品的分拣。
滑块分拣机由滑块、传动机构、控制系统和分拣装置等组成。
滑块是滑动在导轨上的一个长条形零件,它的运动是由传动机构驱动的。
传动机构包括电机、减速器、链条、齿轮等,它们的作用是将电机的旋转转换成滑块的直线运动。
控制系统是滑块分拣机的大脑,它可以根据不同的分拣任务来控制滑块的运动。
分拣装置是用来接收和分拣物品的部件,它可以根据不同的物品特性来设计不同的分拣方式。
滑块分拣机的工作原理是:当物品进入分拣装置时,控制系统会根据物品的特性来判断它应该被分拣到哪个位置。
然后,控制系统会发出指令,传动机构会将滑块移动到相应的位置,将物品推到相应的分拣口。
当物品被推到分拣口时,分拣装置会将它接收并进行分类,然后将分类好的物品送到相应的位置。
滑块分拣机的优点是:高效、精准、可靠。
它可以快速地完成大量的分拣任务,而且分拣的精度非常高,可以达到毫米级别。
此外,滑块分拣机的结构简单,维护成本低,使用寿命长。
滑块分拣机广泛应用于物流、快递、电子、食品等行业,它可以大
大提高生产效率,降低人工成本,提高产品质量。
随着科技的不断发展,滑块分拣机的应用范围将会越来越广泛,它将成为自动化分拣领域的重要设备之一。
课程设计-包装机推包机构运动简图与传动系统设计.
机械原理课程设计说明书设计题目:包装机推包机构运动简图与传动系统设计学院:机电学院专业:机械工程及其自动化姓名:学号:小组成员:指导老师:目录一、设计题目 (2)二、功能分解 (3)三、运动转换 (3)四、执行机构的选择与比较 (3)五、原动机的选择 (5)六、运动方案的拟定 (6)七、传动机构 (8)八、运动示意图 (10)九、运动循环图 (11)十、执行机构计算 (12)十一、参考资料 (14)十二、小结 (15)一、设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcdea线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。
行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
图1 推包机构执行构件运动要求设计任务:1.至少提出两种运动方案,然后进行方案分析评比,选出一种运动方案进行设计;2.确定电动机的功率与转速;3.设计传动系统中各机构的运动尺寸,绘制推包机的机构运动简图;4.对输送工件的传动系统提出一种方案并进行设计;5.编写课程设计说明书。
二、功能分解由运动示意图可知此机构可分解为俩个运动,凸轮机构控制运输爪的升降,导杆机构控制往复运动,俩者的配合及凸轮的设计可以达到abcde的轨迹。
如图4.1中1、2为主动件,2、3、4和5的导杆机构,可以完成a、b、c间或c、d 间的往复运动,1的凸轮与4机构的平底接触,可以使整个4机构上下往复运动,从而有abc与cd间的高度差,通过设计凸轮的参数,配合导杆机构完成整个abcde的运动轨迹。
包装机推包机构运动方案设计

目录一、设计题目 (2)二、设计方案的选定 (3)三、机构的设计 (6)1、偏置滑块机构的设计 (6)2、直动滚子从动件盘形凸轮轮廓设计 (7)四、电动机的选定及传动系统方案的设计 (9)1、电动机转速、功率的确定 (9)2、传动系统的设计 (9)五、小结以及对这次课程设计的心得体会 (12)六、参考文献 (12)一、设计题目现需要设计某一包装机的推包机构,要求待包装的工件1(见图1)先由输送带送到推包机构的推头2的前方,然后由该推头2将工件由a处推至b处(包装工作台),再进行包装。
为了提高生产率,希望在推头2结束回程(由b至a)时,下一个工件已送到推头2的前方。
这样推头2就可以马上再开始推送工作。
这就要求推头2在回程时先退出包装工作台,然后再低头,即从台面的下面回程。
因而就要求推头2按图示的abcde线路运动。
即实现“平推—水平退回—下降—降位退回—上升复位”的运动。
设计数据与要求:要求每5-6s包装一个工件,且给定:L=100mm,S=25mm,H=30mm。
行程速比系数K在1.2-1.5范围内选取,推包机由电动机推动。
在推头回程中,除要求推头低位退回外,还要求其回程速度高于工作行程的速度,以便缩短空回程的时间,提高工效。
至于“cdea”部分的线路形状不作严格要求。
图1 推包机构执行构件运动要求二、设计方案的选定方案一:双凸轮机构与摇杆滑块机构的组合,(见图2)图2双凸轮机构与摇杆机构滑块机构的组合方案一的运动分析和评价:该机构由凸轮1和凸轮2,以及5个杆组成。
机构一共具有7个活动构件。
机构中的运动副有7个转动副,4个移动副以及两个以点接触的高副。
其中机构的两个磙子存在两个虚约束。
由此可知:机构的自由度F=3n-2Pl+Ph-p' =1机构中有一个原动件,原动件的个数等于该机构的自由度。
所以,该机构具有确定的运动。
在原动件凸轮1带动杆3会在一定的角度范围内摇动。
通过连杆4推动杆5运动,然后连杆6在5的推动下带动推头做水平的往返运动,从而实现能推动被包装件向前运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机电工程学院
《块状物品推送机课程设计》
说明书
课题名称:块状物品推送机的机构综合与结构设计学生姓名:学号:
专业:机械设计班级:11机设3 成绩:指导教师签字:
2013年12月21日
目录
1 设计题目及其要求 (2)
2 题目分析 (2)
3 设计 (4)
3.1*******................................................................................................ 错误!未定义书签。
3.2******.................................................................................................. 错误!未定义书签。
4 负载图和速度图............................................................................................ 错误!未定义书签。
...................................................................................................... 错误!未定义书签。
6 总结 (13)
设计内容计算说明结论
1 设计题目及其要求
一、设计题目
在自动包裹机的包装作业过程中,经常需
要将物品从前一工序转送到下一工序。
现要求设
计一用于糖果、香皂等包裹机中的物品推送机,
将块状物品从一位置向上推送到所需的另一位
置,如图6-2所示。
二、设计数据与要求
1.向上推送距离H=80mm,生产率为每
分钟推送物品100件;
2.推送机的原动机为同步转速为3000
转/分的三相交流电动机,通过减速装
置带动执行机构主动件等速转动;
3.由物品处于最低位置时开始,当执行机构主动件转过1500时,推杆从
最低位置运动到最高位置;当主动件再转过1200时,推杆从最高位置
又回到最低位置;最后当主动件再转过900时,推杆在最低位置停留不
动;图2
4.设推杆在上升运动过程中,推杆所受的物品重力和摩擦力为常数,其
值为500N;设推杆在下降运动过程中,推杆所受的摩擦力为常数,其
值为100N;图6-2 推送机工作要求
5.使用寿命10年,每年300工作日,每日工作16小时;
6.在满足行程的条件下,要求推送机的效率高(推程最大压力角小于
350),结构紧凑,振动噪声小
三、设计任务
1.至少提出三种运动方案,然后进行方案分析评比,选出一种运动方案进
行机构综合;
2.确定电动机的功率与满载转速;
3.设计传动系统中各机构的运动尺寸,绘制推送机的机构运动简图;
4.在假设电动机等速运动的条件下,绘制推杆在一个运动周期中位移、速
度和加速度变化曲线;
5.如果希望执行机构主动件的速度波动系数小于3%,求应在执行机构主
动件轴上加多大转动惯量的飞轮;
6.进行推送机减速系统的结构设计,绘制其装配图和两张零件图;
7.编写课程设计说明书
2 题目分析
方案一:连杆机构图1所示的连杆机构由曲柄摇杆机构ABCD 与曲柄滑块机构GHK通过连杆EF相联组合而成。
连杆BC上E点的
轨迹,在部分近似呈以F点为圆心的圆弧形,因此,杆FG在图示位置有一段时间实现近似停歇。
图1
方案二:凸轮机构图2所示的凸轮机构,由凸轮、从动件、和机架三个基本构件组成,能使从动件获得较复杂的动动规律,因为从动件的运动规律取决于凸轮轮廓曲线,所以在应用时只根据从动件的运动规律来设计轮廓曲线就可以了。
图2
由于物品从低处运动至最高处,且有较大的停歇角,故选择方案二。
其传送机构简图如上
回程后半段:
][270210οο-∈ϕ
)1270(2
2h 2ϕι-Φ=S )270(h 42
ϕω
ι-Φ
=
V Φ
=
2
2
h 4a ιω
近休止段:S=0, V=0. a=0
求得轮廓曲线各点的坐标公式如下:
ϕ
ϕcos )(sin (00S Y S X S S +=+)=
r 00=S
代入各已知条件用EXCEL 求解,得轮郭曲线图和各阶段运动图
从动件各段运动图如下:
7、 飞轮转动惯量JF 的近似计算:
设计所飞轮的JF 应满足: δ≤[δ]=0.03 ,即:
δ=△Wmax /[(Je+JF )] ω2m ≤[δ] 得: JF ≥△Wmax/([δ])
ω2m -Je
一般情况下,Je<< JF ,故Je 可以忽略,于是有: JF ≥△Wmax/([δ]ω2m )
用转速n 表示:JF ≥900△Wmax/πδ22n ][
4 总结
设计内容
计算说明 结论。