平角竖直角斜距平距高差坐标增量的测量与计算
角度测量和距离测量(水平角与竖直角测量原理经纬仪和全站仪构造)
水平角:过一点到两个目标的方向线垂直投影到水平面上所成的夹角。
顺时针00~3600
水平度盘
也可看成是包含BA、BC视线
的两个铅垂面之间的两面角。
a
A
c
B
0
270
90
C
180
a
c
计算公式
=右(终)边c-左(始)边a 当c≥a时 β= c – a 当c<a 时 β= c+3600 – a
水平度盘
c
1.仪器误差:仪器校正的残余误差 视准轴误差(CC⊥HH) 盘左盘右观测取平均消除 横轴误差 (HH⊥VV) 盘左盘右观测取平均消除 竖轴误差 (LL⊥VV) 盘左盘右观测取平均不能 抵消,仔细整平。
2.仪器安置误差:对中误差,整平误差 对中误差:边长较短时采用光学对中或强制对中。 整平误差:管水准器气泡偏离中心应小于1格。观
• 掌握对中、整平的目的、方法与要求。 • 瞄准方法:用竖丝对准竖立于测点的标志中心。 • 操作:粗瞄,制动,然后用微动螺旋完成精确瞄准。
水平角观测: •掌握测回法观测水平角的仪器操作方法、观测程序和 记录。 •熟悉“方向观测法”的使用场合、作业程序与记录。
经纬仪的线与铅垂线的夹角
270 ⁰
0⁰
x
180 ⁰
90 ⁰
竖 盘 指 标 差
• 如果水准管气泡居中后指标线偏离标准位置x,则竖 直度盘“盘左读数”+“盘右读数”≠360°;其差数 =2x。X称为竖直度盘的“指标差”
竖盘指标差计算
左 90 (L x )
右 (R x ) 270
1(R
2
L
180)
第2章 角度和距离测量
2.1 水平角与竖直角观测原理 2.2 经纬仪和全站仪的构造及度盘读数 2.3 水平角观测 2.4 垂直角观测 2.5 距离测量
全站仪在道路施工测量中的应用
全站仪在道路施工测量中的应用1.绪论电子全站仪是由光电测距仪、电子经纬仪和数据处理系统组合而成的测量仪器,可以同时进行角度(水平角、竖直角)测量、距离(斜距、平距)测量、高差测量、坐标测量和放样测量。
安置一次仪器,便可以完成在该测站上所有的测量工作。
通过输入输出设备,可以与计算机进行数据交换,即将全站仪中的测量数据下载到计算机里,进行计算、编辑和绘图,同时也可以将计算机中已经编辑好的测量作业所需要的已知数据上传到全站仪中。
应用全站仪不仅使测量的外业工作高效化,而且可以实现整个测量作业的高度自动化,目前,全站仪已成为各施工单位进行测量和放样的主要仪器。
施工测量的目的是根据施工的需要,将图纸上的构筑物的平面位置和高程,按设计要求以一定的精度要求放样到实地上,并在施工过程中进行一系列的放样测量工作,以衔接和指导各工序间的施工。
施工测量是保证施工质量的一个重要环节,贯穿于整个施工过程中。
从道路导线、水准联测、中边线放样、桥隧等构筑物的轴线定位,到基础工程施工,桥梁下部构造对桥梁上部构件的安装和桥梁的桥面系施工以及施工场地平整等,都需要进行施工测量。
只有这样,才能使工程结构或建筑物各部分的尺寸、位置和高程符合设计要求。
有些高大或特殊的建筑物及软土地质的路基及结构物在建成后,还要定期进行沉降观测与变形观测,以便积累资料,掌握下沉和变形的规律,为今后建筑物、道路及结构等的设计、维护和使用提供资料。
任何物体,不外乎由点、线、面所构成。
根据点动成线、线动成面、面动成体的原理,施工测量的基本工作是根据已知点的位置(平面位置和高程)来确定未知点的位置,实质上是确定点间的相对位置(相对平面位置与相对高差)或者确定点的绝对位置;这些工作习惯上称为工程定位和施工放样。
为求得放样位置尽可能的准确,以上放样工作都是遵循“先控制,后碎部”的原则进行的。
对于不同的工程来说,施工测量的具体任务也不同,但放样过程中仪器所安置的方向、距离都是依据控制网计算出来的。
任务竖直角的测量及指标差的计算

后两部分,多采用竖盘指标自动归零补偿器(vertical inde x compensator)来替代。
2.特点:读数指标线固定不动,而整个竖 盘随望远镜一起转动。
5
3、竖盘的注记形式:有顺时针与逆时针两种。
(1)顺时针注记
盘左
270
180
0
指标线
90
盘右
90
0
180
指标线
270
6
(2)逆时针注记
盘左
270
0
180
指标线
90
盘右
90
180
0
指标线
270
7
二、竖直角(vertical angle)的计算公式
1、顺时针注记 α左=90°-L α右=R-270° 故一测回竖直 α=(α左+α右)/2
8
2、逆时针注记
问题:α左= ?
α右=?
故有:α左= L -90° α右=270°- R
一测回竖直角: α=(α左+α右)/2 9
线与水平视线的夹角(也叫垂直角)。
=090 ,仰角为正,俯角为负。
天顶
A
Z
Z
C
A
0° 270°
B
90 °
AC水平线 Nhomakorabea180°
铅
3
垂
C
线
一、竖直度盘(vertical circle)的构造
1.包括:竖盘(vertical circle) 、竖盘指标水准管(vertical index bubble tube)、及其微动螺旋。
2、计算公式
x 1 (L R 360) 2
或
x
1 2
(右
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角坐标增量的计算方法:平距×COS方位角=△X坐标增量平距×Sin方位角=△Y坐标增量坐标的计算方法:已知X坐标±△X坐标增量=X坐标已知Y坐标±△Y坐标增量=Y坐标高差、平距的计算方法:斜距×Sin倾角=高差斜距×COS倾角=平距高差÷Sin倾角=斜距平距÷cos已知度分秒=斜距高程的计算方法:已知高程-仪器高+前视高±高差=该点的顶板高差原始记录计算方法:前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″前视92°49′02″272°49′13″水平角= 92°49′03″实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″实例: 270°30′38″-270°= 00°30′38″激光的计算方法:两点的高程相减:比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、7988、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点)测量:1、先测后视水平角:归零,倒镜180°不能误差15′2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。
要求方位角-已知方位角±180°=拨角方位画两千的图:展点用0.6正好.倾角的计算方法:180°以下的-90°270°-超过180°的两点的高差除平距按tan=倾角比如:2点1500、026-6点1484、096=15、932点~6点平距=127、8315、93÷127、83=接按第二功能键、接按tan接按=接按度分秒键完事。
水准、角度、测距测量的原理、公式、图解都给你汇总好了
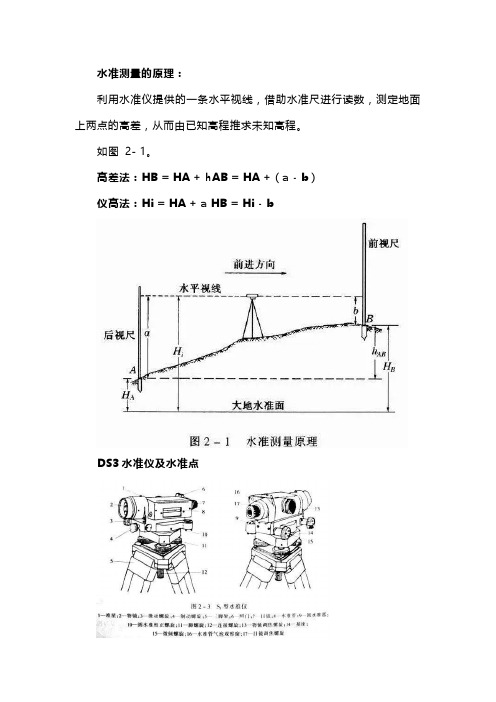
水准测量的原理:利用水准仪提供的一条水平视线,借助水准尺进行读数,测定地面上两点的高差,从而由已知高程推求未知高程。
如图2- 1。
高差法:HB = HA + hAB = HA + ( a - b )仪高法:Hi = HA + a HB = Hi - bDS3水准仪及水准点水平角测量原理(一)定义:水平角就是地面上某点到两目标的方向线铅垂投影到水平面上所成的角度,其取值范围为0 ~ 360。
(二)测角原理:如图3-1测回法测回法是测水平角的基本方法,用于两个目标方向之间的水平角的观测。
如图,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间的水平角β。
竖直角测量原理:(一)定义地面某点至目标的方向线与水平面之间的夹角,取值范围为–90~90。
仰角为正,俯角为负。
(二)测角原理:如图距离:两标志点之间的水平直线长度。
直线定线:把多根标杆标定在已知直线的工作。
方法有目估定线和经纬仪定线。
钢尺量距:精密钢尺量距时必须对所量距离施加尺长改正、温度改正,倾斜,即用钢尺的实际长度。
其实际长度用尺长方程式表示,它的一般形式为:l t = l + Δl + a ×l(t - t0 )视距测量:利用望远镜的视距丝装置,根据几何光学原理同时测定距离和高差的方法。
视线水平时:距离:D = k·l 高差:h = i –v斜距情况下:距离:D = kl cos2α高差:h = ( 1 / 2 ) kl sin2α+ i –v式中:l为上下丝读数之差;α为竖直角;i为仪器高;v为目标高(中丝读数);k = 100光电测距:原理:通过测定光波在两点间传播的时间计算距离的方法。
公式:D′= ( 1 / 2 )* c* t式中:c为空气中的光速;t为光波在两点间往返的时间。
全站仪坐标计算公式[]
![全站仪坐标计算公式[]](https://img.taocdn.com/s3/m/9873866dcf84b9d528ea7a94.png)
全站仪的功能介绍1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
4、点位放样(Layout)(1)功能:根据设计的待放样点P 的坐标,在实地标出P 点的平面位置及填挖高度。
(2)放样原理1)在大致位置立棱镜,测出当前位置的坐标。
2)将当前坐标与待放样点的坐标相比较,得距离差值dD 和角度差dHR 或纵向差值Δ X 和横向差值Δ Y 。
3)根据显示的dD 、dHR 或ΔX 、ΔY ,逐渐找到放样点的位置。
方位角的计算方法

方位角的计算方法:(已知方位角+水平角大于540 °—540 °)已知方位角+水平角±180° =方位角坐标增量的计算方法: 平距X COS方位角=△ X坐标增量平距X Sin方位角=△ 丫坐标增量坐标的计算方法: 已知X坐标X坐标增量=X坐标已知丫坐标丫坐标增量=丫坐标咼差、平距的计算方法:斜距X Sin倾角=高差斜距X COS顷角=平距高差+ Sin倾角二斜距平距+ cos已知度分秒二斜距已知咼程一仪器咼+前视咼±咼差=该点的顶板咼差原始记录计算方法: 前视一后视相加* 2=水平角(前视不够—后视的+ 360°再减)后视00 ° 00 ‘ 00〃180 ° 00’ 09〃272° 49' 13〃 水平角=92 ° 49' 03〃激光的计算方法:两点的高程相减:比如:5 点高程 1479、479— 4 点高程 1471、052 = 8、427 两点之间的平距: 60、673X tan7 ° 19' 25〃 =7、798 & 427 — 7、797=0、629 (上山前面的点一定高于后面的点, 所以前面的点减后面的点)测量:1、先测后视水平角:归零,倒镜 180°不能误差15'2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、咼差、量出仪器咼,前视量出前视咼。
要求方位角—已知方位角 ± 180 ° =拨角方位画两千的图:展点用 0.6正好.倾角的计算方法:180°以下的一90°270° —超过180 °的两点的高差除平距按tan=倾角前视 92° 49' 02〃 实测倾角:正镜—270° 倒镜—90°(正、倒镜相加—360° ) 实例: 110 ° 30' 38 —90° = 00 ° 30' 38〃实例:270 ° 30' 38〃 —270 ° = 00 ° 30' 38〃比如:2 点 1500、026— 6 点 1484、096=15、93 2点〜6点平距=127、83 15、93 + 127、83=接按第二功能键、接按 tan 接按=接按度分秒键完事。
角度、坐标测量计算公式细则

计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180 如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+?h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示) 1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:?Xab=Sab×COSαab 则有Xb=Xa+?Xab?Yab=Sab×SINαab Yb=Ya+?Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章距离测量第四章距离测量 (1)§4-1 钢尺量距 (2)一、量距工具 (2)二、精密短距测量 (3)三、成果整理 (3)§4-2 视距测量 (4)一、视距测量原理 (4)二、视距测量方法 (6)§4-3 光电测距 (7)一、光电测距原理 (7)二、测距成果整理 (9)三、测距仪标称精度 (10)§4-4 全站仪简介 (10)一、全站仪的基本构造 (10)二、全站仪的分类 (11)三、全站仪的等级与检测 (11)四、徕卡TPS700全站仪简介 (12)五、全站仪使用注意事项 (16)距离是确定地面点位置的基本要素之一。
测量上要求的距离是指两点间的水平距离(简称平距),如图4-1中,A‘B‘的长度就代表了地面点A、B之间的水平距离。
若测得的是倾斜距离(简称斜距),还须将其改算为平距。
水平距离测量的方法很多,按所用测距工具的不同,测量距离的方法有一般有钢尺量距、视距测量、光电测距、全站仪测距等。
图4-1两点间的水平距离§4-1 钢尺量距顾名思义,钢尺量距就是利用具有标准长度的钢尺直接量测两点间的距离。
按丈量方法的不同它分为一般量距和精密量距。
一般量距读数至厘米,精度可达1/3000左右;精密量距读数至亚毫米,精度可达1/3万(钢卷带尺)及1/100万(因瓦线尺)。
由于光电测距的普及,在现今的测量工作中己很少使用钢尺量距,只是在精密的短距测量中偶尔用到,下面仅就精密短距测量的有关问题作简要介绍。
一、量距工具钢尺分为普通钢卷带尺和因瓦线尺两种。
普通钢卷带尺,尺宽10~15mm,长度有20m、30m和50m数种,卷放在圆形盒或金属架上,钢尺的分划有几种,有以厘米为基本分划的,适用于一般量距;有的则在尺端第一分米内刻有毫米分划;也有将整尺都刻出毫米分划的;后两种适用于精密量距。
较精密的钢尺,制造时有规定的温度及拉力,如在尺端刻有“30m、20℃、100N”字样。
它表示在检定该钢尺时的温度为20摄氏度,拉力为100牛顿,30m为钢尺刻线的最大注记值,通常称之为名义长度。
因瓦线尺是用镍铁合金制成的,尺线直径1.5mm,长度为24m,尺身无分划和注记,在尺两端各连一个三棱形的分划尺,长8cm,其上最小分划为1mm。
因瓦线尺全套由4根主尺、1根8m(或4m)长的辅尺组成。
不用时卷放在尺箱内。
钢尺量距的辅助工具有测钎、花杆、垂球、弹簧秤和温度计。
图4-2普通钢卷带尺二、精密短距测量所谓短距测量,是指被测距离不大于整尺全长的量距工作。
这在不便安置测距仪的精密工程测量中时有出现。
其测量方式和成果整理方法同样适用于长距离测量。
量距前首先标定被测距离的端点位置,通过端点分别划一垂直于测线的短线作为丈量标志。
丈量组一般由5人组成,使用检定过的基本分划为毫米的钢尺,2人拉尺, 2人读数,1人指挥兼记录和读温度。
丈量时,一人手拉挂在钢尺零分划端的弹簧秤,另一人手拉钢尺另一端,将尺置于被测距离上,张紧尺子,待弹簧秤上指针指到该尺检定时的标准拉力时,两端的读尺员同时读数,估读至0.5mm 。
每段距离要移动钢尺位置丈量三次,移动量一般在一厘米以上,三次量距较差一般不超过3mm 。
每次读数的同时,读记温度,精确至0.5℃。
三、成果整理精密量距中的量距结果需进行尺长改正、温度改正及倾斜改正,求出改正后的平距。
1.尺长改正钢尺在标准拉力、标准温度下的检定长度l '与钢尺的名义长度0l 一般不相等,其差数l ∆为整尺段的尺长改正数,即0l l l -'=∆任一丈量长度l 的尺长改正数为l l ll d 0∆=∆ (4—1) 2.温度改正钢尺长度受温度的影响会伸缩。
当量距时的温度t 与检定钢尺时的温度t 。
不一致时,需进行温度改正,其公式为()l t t l t 0-=∆α (4—2)式中α为钢尺的线膨胀系数。
3.倾斜改正如图4-3所示,设l 为量得的斜距,h 为距离两端点间的高差,要将l 改算成平距d ,需加入倾斜改正△l h ,即⎥⎥⎦⎤⎢⎢⎣⎡-⎪⎪⎭⎫ ⎝⎛-=--=-=∆112/12222l h l l h l l d l h (4—3)将2/1221⎪⎪⎭⎫⎝⎛-l h 展成级数,并顾及h 与l 之比值很小,则有lh l h 22-=∆ (4—3)倾斜改正数永为负值。
图4-3 斜距改算平距经三项改正后的平距为h t d l l l l d ∆+∆+∆+= (4—4)在标准拉力和标准温度下检定的钢尺,可将它的尺长改正和温度改正表示成实际长度的函数,称为尺长方程式。
即()00l t t l l d d -+∆+=α (4—5)有了钢尺的尺长方程式,就可对用该钢尺测得之距离作尺长和温度改正计算。
【例】 某尺段实测距离为29.8655m ,量距所用钢尺的尺长方程式为:l =30+0.005+0.0000125×30(t-20°C)m ,丈量时温度为30℃,所测高差为0.238m ,求水平距离。
解:方法1 ①尺长改正0050.08655.2930005.0=⨯=∆d l m ②温度改正()0037.08655.2920300000125.0=⨯-⨯=∆t l m ③倾斜改正0009.08655.292238.02-=⨯-=∆h l m ④水平距离为8733.290009.00037.00050.08655.29=-++=d m 方法2①由尺长方程算出在30℃时整尺(30米)经尺长温度改正后的长度 ()0088.302030300000125.0005.030=-⨯++='l m ②经尺长温度改正后的实测距离长度 8743.298655.29300088.30=⨯=l m ③加倾斜改正后的水平距离8733.290009.08743.29=-=∆+=h l l d m§4-2 视距测量视距测量是利用测量仪器望远镜中的视距丝并配合视距尺,根据几何光学及三角学原理,同时测定两点间的水平距离和高差的一种方法。
此法操作简单,速度快,不受地形起伏的限制,但测距精度较低,一般可达1/200,故常用于地形测图。
视距尺一般可选用普通塔尺。
一、视距测量原理1、视线水平时的视距测量公式欲测定A 、B 两点间的水平距离,如图4-4所示,在A 点安置经纬仪,在B 点竖立视距尺,当望远镜视线水平时,视准轴与尺子垂直,经对光后,通过上、下两条视距丝m 、n 就可读得尺上M 、N 两点处的读数,两读数的差值l 称为视距间隔或视距。
f 为物镜焦距,p 为视距丝间隔,δ为物镜至仪器中心的距离,由图可知,A 、B 点之间的平距为:δ++=f d D图4-4 水平视距测量其中d 由两相似三角形MNF 和m n F 求得pl f d = l pfd =因此()δ++=f l pfD 令K pf=,称为视距乘常数,c f =+δ,称为视距加常数,则 c Kl D +=(4-6)在设计望远镜时,适当选择有关参数后,可使K =100,c =0。
于是,视线水平时的视距公式为l D 100= (4-7)两点间的高差为v i h -= (4-8) 式中i 为仪器高,v 为望远镜的中丝在尺上的读数。
2、视线倾斜时的视距测量公式当地面起伏较大时,必须将望远镜倾斜才能照准视距尺,如图4-3所示,此时的视准轴不再垂直于尺子,前面推导的公式就不适用了。
若想引用前面的公式,测量时则必须将尺子置于垂直于视准轴的位置,但那是不太可能的。
因此,在推导倾斜视线的视距公式时,必须加上两项改正:(1)视距尺不垂直于视准轴的改正;(2)倾斜视线(距离)化为水平距离的改正。
图4-5 倾斜视距测量在图4-5中,设视准轴倾斜角为δ,由于ϕ角很小,略为17′,故可将∠NN ′E 和∠MM ′E 近似看成直角,则∠NEN ′=∠MEM ′=δ,于是()δδδδcos cos cos cos l EN ME EN ME N E E M N M l =+=+='+'=''='根据(4-7)式得倾斜距离δcos Kl l K S ='=化算为平距为δδ2cos cos Kl S D ==(4-9)A 、B 两点间的高差为v i h h -+'=式中δδδδ2sin 21sin cos sin Kl Kl S h =⋅==' 称为初算高差。
故视线倾斜时的高差公式为v i Kl h -+=δ2sin 21(4-10)二、视距测量方法1.安置仪器于测站点上,对中、整平后,量取仪器高i 至厘米。
2.在待测点上竖立视距尺。
3.转动仪器照准部照准视距尺,在望远镜中分别用上、下、中丝读得读数M 、N 、V ;再使竖盘指标水准管气泡居中,在读数显微镜中读取竖盘读数。
4.根据读数M 、N 算得视距间隔l ;根据竖盘读数算得竖角δ;利用视距公式(4-9)和(4-10)计算平距D 和高差h 。
记录及计算见表4-1。
表4-1 视距测量记录§4-3 光电测距与钢尺量距的繁烦和视距测量的低精度相比,电磁波测距具有测程长、精度高、操作简便、自动化程度高的特点。
电磁波测距按精度可分为Ⅰ级(m D ≤5mm)、Ⅱ级(5mm <m D ≤10mm =和Ⅲ级(m D >10mm)。
按测程可分为短程(<3km)、中程(3~5km )和远程(>15km )。
按采用的载波不同,可分为利用微波作载波的微波测距仪;利用光波作载波的光电测距仪。
光电测距仪所使用的光源一般有激光和红外光。
下面将简要介绍光电测距的原理及测距成果整理等内容。
一、光电测距原理光电测距是通过测量光波在待测距离上往返一次所经历的时间,来确定两点之间的距离。
如图4-6所示,在A 点安置测距仪,在B 点安置反射棱镜,测距仪发射的调制光波到达反射棱镜后又返回到测距仪。
设光速c 为已知,如果调制光波在待测距离D 上的往返传播时间为t ,则距离D 为t c D ⋅=21(4-11)式中c=c 0/n ,其中c 0为真空中的光速,其值为299792458m/s ,n 为大气折射率,它与光波波长λ,测线上的气温T 、气压P 和湿度e 有关。
因此,测距时还需测定气象元素,对距离进行气象改正。
图4-6 光电测距由(4-11)式可知,测定距离的精度主要取决于时间t 的测定精度,即cdt dD 21=。
当要求测距误差dD 小于1cm 时,时间测定精度dt 要求准确到6.7×10-11s ,这是难以做到的。
因此,时间的测定一般采用间接的方式来实现。
间接测定时间的方法有两种。
1.脉冲法测距由测距仪发出的光脉冲经反射棱镜反射后,又回到测距仪而被接收系统接收,测出这一光脉冲往返所需时间间隔t 的钟脉冲的个数,进而求得距离D 。