运动控制指令应用示例共16页
台达运动控制应用例

台达运动控制应用例目录第1章单轴运动.........................................................................1-11.1原点回归模式...................................................................1-11.2自行规划多段变速度...........................................................1-81.3台达ASDA伺服简单定位展示系统........................................1-161.4手摇轮跟随模式(一)......................................................1-231.5手摇轮跟随模式(二)......................................................1-291.6手摇轮跟随模式(三)......................................................1-35第2章电子凸轮.........................................................................2-12.1电子凸轮(一)–周期性单轴凸轮...........................................2-12.2电子凸轮(二)-非周期性单轴凸轮.......................................2-122.3电子凸轮(三)-多轴凸轮.....................................................2-252.4绕线机应用....................................................................2-322.5电子凸轮应用–旋切控制....................................................2-412.6电子凸轮应用–追剪控制(Fly saw)......................................2-53第3章G-Code应用...................................................................3-13.1G–Code应用-三轴同动绘出Delta LOGO...............................3-13.2M Code应用...................................................................3-63.3GNC载应用-使用PMSoft汇入G-Code.................................3-103.4GNC应用-PMGDL软件下载(一般模式)..............................3-143.5GNC应用-PMGDL软件下载(DNC模式).............................3-223.6GNC应用-使用D Register转G码 ASCII格式下载..................3-283.7GNC应用-使用HMI配方方式透过 USB Disk下载...................3-383.8点胶模式.......................................................................3-49第4章其它应用.........................................................................4-14.1中断应用.........................................................................4-14.2计数器应用......................................................................4-64.3定时器应用....................................................................4-134.4以20PM作为从机应用.....................................................4-16i4.5PWM应用-水闸门控制程序................................................4-194.6高速比较应用.................................................................4-224.7高速捕捉应用.................................................................4-284.8制袋机应用-单段速外部触发模式........................................4-334.9PID应用......................................................................4-38 ii目录1.1 原点回归模式1.2 自行规划多段变速度1.3 台达ASDA伺服简单定位展示系统1.4 手摇轮跟随模式(一)1.5 手摇轮跟随模式(二)1.6 手摇轮跟随模式(三)1-1第1章 单轴运动1-1 1.1 原点回归模式20PM 位置控制与伺服驱动系统系统架构图【范例说明】1. 启动原点回归模式时,不同的启动位置其行走的路径也不同,以原点回归方向正转为例,其行走路径如下图所示:2. 20PM 的原点回归模式的设定参数D1816+80*N( N=0~2 )如以下所示:原点回归方向:原点回归方向可分为正转和反转。
S7-1200伺服指令运动指令详解及示例
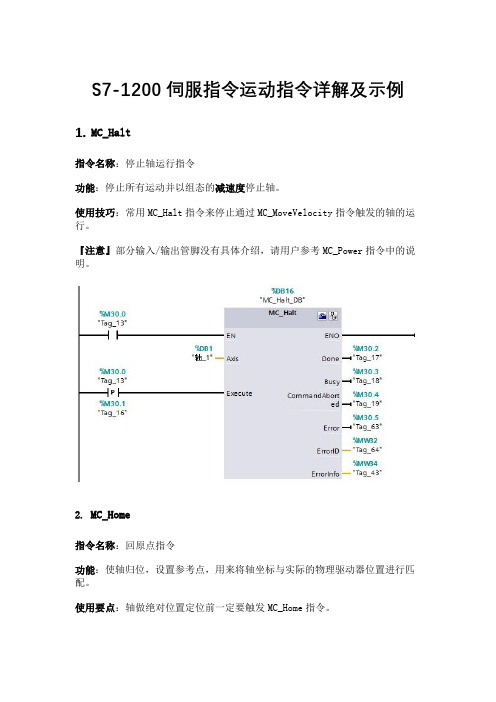
S7-1200伺服指令运动指令详解及示例1. MC_Halt指令名称:停止轴运行指令功能:停止所有运动并以组态的减速度停止轴。
使用技巧:常用MC_Halt指令来停止通过MC_MoveVelocity指令触发的轴的运行。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
2. MC_Home指令名称:回原点指令功能:使轴归位,设置参考点,用来将轴坐标与实际的物理驱动器位置进行匹配。
使用要点:轴做绝对位置定位前一定要触发MC_Home指令。
『注意』部分输入/输出管脚没有具体介绍,请用户参考MC_Power指令中的说明。
①Position:位置值•Mode = 1时:对当前轴位置的修正值•Mode = 0,2,3时:轴的绝对位置值②Mode:回原点模式值•Mode = 0:绝对式直接回零点,轴的位置值为参数“Position”的值•Mode = 1:相对式直接回零点,轴的位置值等于当前轴位置 + 参数“Position”的值•Mode = 2:被动回零点,轴的位置值为参数“Position”的值•Mode = 3:主动回零点,轴的位置值为参数“Position”的值下面详细介绍模式0和模式1.Mode = 0绝对式直接回原点以下图为例进行说明。
该模式下的MC_Home指令触发后轴并不运行,也不会去寻找原点开关。
指令执行后的结果是:轴的坐标值更直接新成新的坐标,新的坐标值就是MC_Home指令的“Position”管脚的数值。
例子中,“Position”=0.0mm,则轴的当前坐标值也就更新成了0.0mm。
该坐标值属于“绝对”坐标值,也就是相当于轴已经建立了绝对坐标系,可以进行绝对运动。
『优点』MC_Home的该模式可以让用户在没有原点开关的情况下,进行绝对运动操作。
Mode = 1相对式直接回原点与Mode = 0相同,以该模式触发MC_Home指令后轴并不运行,只是更新轴的当前位置值。
运动控制系统应用实例
车辆纵向控制是在行车速度方向上的控制,即车速以及本车与前后车或障碍 物距离的自动控制。巡航控制和紧急制动控制都是典型的自动驾驶纵向控制 案例。这类控制问题可归结为对电机驱动、发动机、传动和制动系统的控制。 各种电机-发动机-传动模型、汽车运行模型和刹车过程模型与不同的控制器算 法结合,构成了各种各样的纵向控制模式,典型结构如图 9-3 所示。 图9-3所 示的就是一个无人驾驶汽车的基本结构示意图,以感知为主,有关车辆本身 的操纵性则没有反映。
图9-1 无人驾驶汽车结构框图 分析图9-1,由驾驶需求、外部感知识别、决策规划、控制执行和车本体等模 块组成。
其中:
感知部分由摄像头、激光雷达、毫米波雷达、超声波雷达等多种方式共同组 成。 激光雷达 激光雷达的生产厂商集中在国外,包括美国Velodyne公司、 Quanegy公司以及德国的Ibeo公司等,国内激光雷达公司有深圳速腾、北京 北科、上海禾赛等。 毫米波雷达、超声波雷达 近年来毫米波雷达和超声波雷达也逐渐成为自动驾
本讲主要内容
第九章运动控制系统应用实例 9.1 无人驾驶汽车 9.2高速电子锯 9.3胡萝卜汁的灌装 9.4点胶机 9.5包装生产线 9.6缠绕生产线 9.7恒压供水系统
9.1 无人驾驶汽车
• 1.问题提出 • 2.功能分析 • 3. 系统组成 • 4. 工作流程 • 5. 结论
1.问题提出
• 随着人民生活水平的提升和科学技术水平 的发展,市场对自动驾驶车辆的需求越来 越高,有关自动驾驶的标准的分级,主要 有SAE(美国机动车工程师学会)标准和 NHTSA(国家公路交通安全管理局)两个 标准;目前,前者受到大多数业内人士的 认可,它从Lv0-Lv5将自动驾驶依据控制辆行驶的基本功能来看,无人驾驶应该完成 有人操作的所有功能,从操控性来看,要有自动 控制车辆加减速、制动、转向动作,要能依据感 知传感器实现对行驶环境的精确感知,依据GIS、 GPS(北斗)确定合理的行车线路。
S7-200SMART运动控制指令详解

S7-200SMART运动控制指令详解年初钜惠!想要plc程序案例撩我S7-200 smart 运动控制指令由编程软件向导生成,运动控制指令有很多条构成,且每条指令都带有很多接口参数,想要使用这些指令,要先知道接口是什么意思,虽然帮助文章都有解释,但读懂帮助文件也很费劲,今天就详细给大家介绍运动指令的使用。
S7-200 SMRAT 运动控制指令如下图生成:1、选择'运动'右键打开。
2、本次就以'轴0'为例。
3、命个名字。
4、数字1位选择工程单位,可以使工程单位,也可以使用脉冲。
数字2是电机旋转一圈的脉冲量,我目前步进拨码设定是10000个脉冲旋转一周数字3是单位,根据自己需要设定数字4是电机旋转一圈的工程量,我设定的是360度,也就是说10000个脉冲对应360度。
5、方向控制,我是用的脉冲加方向,所以选择单项2轴。
6、正负极限根据需要设定,我这个没有正负极限就没有选择。
7、零电位使用,走绝对位置和相对位置之前一定要定义好原点,否则绝对位置和相对位置不运行。
8、0脉冲位置,也可以使用此点定义0点。
9、停止根据需要选择,通过阅读STP就能理解什么意思。
10、停止根据需要选择,通过阅读TRIG就能理解什么意思。
11、禁用根据需要选择,通过阅读DIS就能理解什么意思。
12、最大速度和最小速度根据现场情况设定,我设定最大速度为360度/秒。
13、JOG命令也就是手动运行,根据需要设定速度,建议设定小一些,看看运行速度再调整。
14、此处设定加减速时间,也就是脉冲输出的加减速时间,根据现场情况设定。
15、急停补偿。
16、反冲补偿,也就是校准丝杠间隙。
17、参考点设定18、找零点时速度和方向设定。
19、偏移量设定20、搜索参考点方式选择21、从驱动器中读取绝对位置22、曲线设定,我这里没用曲线,没有生成曲线。
23、点'建议'自动分配地址。
24、组件25、映射显示26、完成,点击生成就完成了。
FX系列plc常用运动控制指令

FX系列plc常用运动控制指令1、PLSR:带加减速功能的定脉冲数脉冲输出指令,以指定的速度输出一定数量的脉冲,并且,启动时有加速过程,停止时有减速过程。
指令输入方式:[PLSR K3000 K2000 K300 Y0]K3000:最高输出频率K2000:脉冲数量K300:加减速时间(单位ms)Y0:脉冲输出点2、PLSY:基本脉冲输出指令,以一定的频率输出指定数量的脉冲,但是没有加减速过程。
指令输入方式:[PLSY K2000 D0 Y0]K2000:指定的脉冲输出频率D0指定的脉冲输出数,当该值为0时,输出脉冲不受限制Y0:指定的脉冲输出端子3、PLSV:可调脉冲输出指令,可以实时改变脉冲频率。
该指令无法设置发出脉冲的总数,也就是不能通过指令定位。
指令输入方式:[PLSV D0 Y0 Y3]D0:脉冲输出频率Y0:发出脉冲的输出点Y3:方向点4、DRVA:绝对定位指令,它的脉冲总数实际是它要到达的目标值,也就是和各高速点计数寄存器相匹配,例如,当你输入脉冲目标值为4000,而你高速点的计数寄存器中是6000,这时它会朝着反向发出2000个脉冲。
指令输入方式:[DRVA K4000 K3000 Y0 Y3]K4000:脉冲总数K3000:脉冲频率Y0:脉冲的输出点Y3:脉冲的方向点注意:每个高速脉冲输出点都有自己的脉冲计数寄存器,无论通过哪个指令发出脉冲,高速脉冲输出点都会有一个特定的寄存器记录所发出的脉冲数,包括正向的和反向的,可做为运动控制中每个轴的坐标。
5、DRVI:相对定位指令,它的脉冲总数是以当前位置为起点将要运动的距离,而不考虑高速点计数器中的脉冲数。
指令输入方式:[DRVI K4000 K3000 Y0 Y3]K4000:脉冲总数K3000:脉冲频率Y0:脉冲的输出点Y3:脉冲的方向点6、ZRN:回原点指令,该指令触发后PLC开始输出脉冲控制电机以第一速度运动,在原点信号的上升沿切换到第二速度运动,在原点信号的下降沿停止运动。
运动控制指令介绍
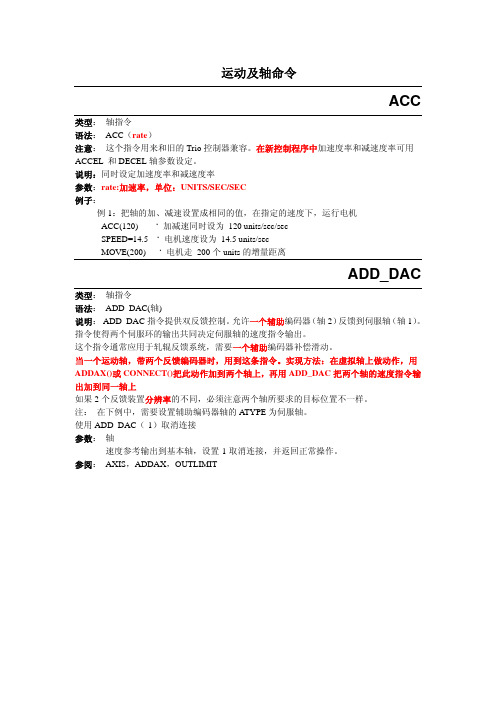
运动及轴命令ACC类型:轴指令语法: ACC(rate)注意:这个指令用来和旧的Trio控制器兼容。
在新控制程序中加速度率和减速度率可用ACCEL 和DECEL轴参数设定。
说明:同时设定加速度率和减速度率参数:rate:加速率,单位:UNITS/SEC/SEC例子:例1:把轴的加、减速设置成相同的值,在指定的速度下,运行电机ACC(120) ‘ 加减速同时设为 120 units/sec/secSPEED=14.5 ‘ 电机速度设为 14.5 units/secMOVE(200) ‘ 电机走 200个units的增量距离ADD_DAC类型:轴指令语法: ADD_DAC(轴)说明: ADD_DAC指令提供双反馈控制。
允许一个辅助编码器(轴2)反馈到伺服轴(轴1)。
指令使得两个伺服环的输出共同决定伺服轴的速度指令输出。
这个指令通常应用于轧辊反馈系统,需要一个辅助编码器补偿滑动。
当一个运动轴,带两个反馈编码器时,用到这条指令。
实现方法:在虚拟轴上做动作,用ADDAX()或CONNECT()把此动作加到两个轴上,再用ADD_DAC把两个轴的速度指令输出加到同一轴上如果2个反馈装置分辨率的不同,必须注意两个轴所要求的目标位置不一样。
注:在下例中,需要设置辅助编码器轴的ATYPE为伺服轴。
使用ADD_DAC(-1)取消连接参数:轴速度参考输出到基本轴,设置-1取消连接,并返回正常操作。
参阅: AXIS,ADDAX,OUTLIMIT例1:BASE(1)‘使两轴编码器在相同的线性距离反馈回相同的计数ENCODER_RATIO(counts_per_mm2, counts_per_mm1)UNITS AXIS(1) = counts_per_mm1UNITS AXIS(2) = counts_per_mm1 ‘ 单位必须相同ADD_DAC(2) ' 把轴2 的DAC_OUT叠加到轴1上ADDAX(1) AXIS(2) ' 把轴1的轨迹加到轴2上‘到现在,两轴已经准备就绪MOVE(1200)WAIT IDLEADDAX类型:运动控制指令语法: ADDAX(轴号)说明: ADDAX指令将2个或多个的运动叠加形成较复杂的运动轨迹。
两轴运动控制器指令说明
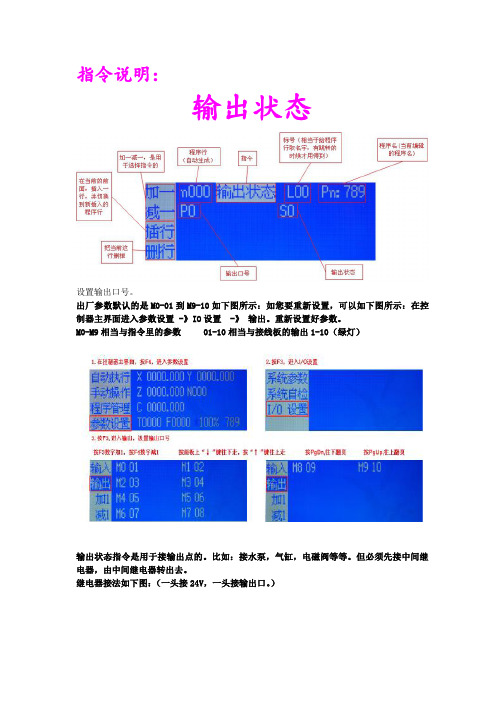
指令说明:输出状态设置输出口号。
出厂参数默认的是M0-01到M9-10如下图所示:如您要重新设置,可以如下图所示:在控制器主界面进入参数设置-》IO设置-》输出。
重新设置好参数。
M0-M9相当与指令里的参数01-10相当与接线板的输出1-10(绿灯)输出状态指令是用于接输出点的。
比如:接水泵,气缸,电磁阀等等。
但必须先接中间继电器,由中间继电器转出去。
继电器接法如下图:(一头接24V,一头接输出口。
)参数:P(输出口号),S(输出状态)取值范围:P(0-9),S(0:关,1:开)(特殊指令)输入控制输出在参数设置画面下(主画面进入“参数设置”),按“空格”键进入此设置。
显示“入00态00出00态00类00”共四行。
入:指输入口号(1-10)态:指相应的输入口为0/1时有效出:批输出态号(0-9),对应于M0-M9态:指相应的输出态为0/1类:0:电平状态:相应的输入口与其态相符时使输出态置为相应的输出状态1:脉冲方式:相应的输入口触发一次使输出态置为相应的输出状态注:输入口为零时无效最多可设置四个延时等待延时相应时间。
时间单位0.1/0.01秒参数:T(延时的时间)。
取值范围:(0-99999)当T为0时执行暂停功能,暂停后按面板上的启动键继续。
时间单位:0.1秒默认的是0.1秒,如需时间更精确的话,在控制器界面进入参数设置-》系统参数-》选项(0.01秒)如下图时间单位:0.01秒直线插补沿直线,以F速度×速度倍率,运动给定的增量值。
此运动受速度倍率的影响,且与当前F速度有关。
参数:X,Y,Z,C(向运动增量)F(运动速度,如F速度为0,默认速度300,数值越大速度越高)注:F为0,受上直线插补、测位运动、圆弧指令速度的影响参数:P(输入口号)S(输入口状态)取值范围:P(1-10)S(0,1)P参数(非0)选择的输入口S状态为(0/1)时等待。
(用与常开、常闭)常开常闭接法:(三线传感器:一头接输入点,另外两头分别接24V,24G)(二线传感器:一头接输入点,另外一头接24G)当P为0,S为1时,执行无限运动。
PLS2往复运动自动变换方向示例程序-PLS2PWM2PLS
程序编写简介1
整体功能指令使用说明——该示例程序主要是脉冲输出指令PLS2的往复自动变换 方向的运动示例
• Network1和Network2主要完成对各种变量的初始化,%SX4表示第一个运行周期 为ON,以后的周期为OFF,其中%Q1.3为方向输出(所以电机运行方式为脉冲+方 向,接线时%QX1.0接脉冲线、%Q1.3接方向线)
使用 示例程序3--SIGLPLS和中断及高速定时器的综合应用 示例程序4--带DOG搜索的机械原点回归和相对地址位置运动
示例程序1
(PLS2往复运动自动变换方向 )
程序1功能示意图
A
B
DD10计数到2段时 复位为0并反向运行
DD0计数到10 段时停止运行
示例程序1通过指令PLS2实现--连续完成10段同频率同脉冲数输出(也可变换) 、且每 2段自动更换方向的运行案例
PTO
PLS2 PWM
PWM2PLS PWM2PLS PLS2
程序编写简介1
整体功能指令使用说明——该示例程序主要是3种不同脉冲输出指令PLS2、 PWM2PLS和PTO共同使用时的运动示例(包含配合指令 PLSPAUSE、PLSREAD、PLSRSME和PLSSTOP的综 合应用)
• Network1开启高速计数器和两个中断号(101为%IX0.0上升沿中断、103为%IX0.1 上升沿中断,参考下表或硬件手册中的外部中断表),两个中断的产生还需要注意接 线,单脉冲的输出采用了通道2--%QX1.0和通道3--%QX1.1,所以首先输入端子 0CH的COM需和输出端子1CH的COM-相接,再连接%QX1.0--%IX0.0、%QX1.1-%IX0.1
程序编写简介2
• Network7中的运行结束标志位%SX87(一次脉冲输出完成由OFF转为ON)是针对 通道2的,其它两个通道也有相应的,还对%WX0.1进行开合 • Network9通过或ORB和异或XORB完成对%Q1.3方向的自动改变