机械原理3-28MATLAB平面连杆机构运动分析,解三角函数超越方程
matlab平面连杆结构分析(机械原理课程设计)

优化参数:连杆 长度、角度、质 量等
优化结果:得到 最优的连杆结构 设计
感谢观看
汇报人:
平面连杆结构的应用范围
机械工程:用于设计、分析和优化机械设 备
生物医学:用于设计、分析和优化假肢、 康复设备等
航空航天:用于设计、分析和优化飞机、 火箭等航天器
机器人技术:用于设计、分析和优化机器 人关节、机械臂等
汽车工业:用于设计、分析和优化汽车底 盘、悬挂系统等
建筑工程:用于设计、分析和优化建筑结 构、桥梁等
03
平面连杆结构的运动学分析
平面连杆结构的运动学方程
平面连杆结构的运动学方程是描述连杆系统运动状态的数学模型 运动学方程包括位移方程、速度方程和加速度方程 运动学方程的建立需要知道连杆系统的几何参数和运动参数 运动学方程的求解可以通过数值积分方法或解析方法进行
平面连杆结构的运动学特性
运动学方程:描述连杆结构的运动状态 运动学参数:包括位移、速度、加速度等 运动学约束:限制连杆结构的运动范围 运动学仿真:通过计算机模拟连杆结构的运动过程
平面连杆结构的形状优化
优化目标:提 高连杆结构的 稳定性和刚度
优化方法:有 限元分析、拓
扑优化等
优化参数:连 杆的长度、宽
度、厚度等
优化效果:提 高连杆结构的 承载能力和使
用寿命
平面连杆结构的拓扑优化
拓扑优化:通过改变材料的分布和形状, 约束条件:结构的刚度、强度、稳定
以实现最优的结构性能
性等性能要求
目标函数:最小化重量或体积,同时 满足给定的性能要求
优化方法:遗传算法、粒子群算法、 模拟退火算法等
设计变量:材料的分布和形状
应用领域:汽车、航空航天、机械制 造等
基于matlab的连杆机构设计
基于matlab的连杆机构设计————————————————————————————————作者: ————————————————————————————————日期:目录1平面连杆机构的运动分析 (1)1.2 机构的工作原理 (1)1.3机构的数学模型的建立 (1)1.3.1建立机构的闭环矢量位置方程...................................................11.3.2求解方法.....................................................................22基于MATLAB程序设计 (4)2.1 程序流程图 (4)2.2 M文件编写 (6)2.3程序运行结果输出 (7)3 基于MATLAB图形界面设计 (11)3.1界面设计……………………………………………………………………………………………113.2代码设计……………………………………………………………………………………………124 小结 (17)参考文献 (18)1平面连杆机构的运动分析1.1 机构运动分析的任务、目的和方法曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。
对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。
还可以根据机构闭环矢量方程计算从动件的位移偏差。
上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。
机构运动分析的方法很多,主要有图解法和解析法。
当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。
基于matlab的平面连杆机构优化设计

基于matlab的平面连杆机构优化设计
基于Matlab的平面连杆机构优化设计是指利用Matlab软件平台,对平面连杆机构进行优化设计的过程。
平面连杆机构是一种常见的机械传动机构,广泛应用于各种机械系统中,如机械手、凸轮机构等。
优化设计是指通过数学建模、计算和分析,寻求满足一定性能要求的最优设计方案。
在基于Matlab的平面连杆机构优化设计中,通常需要建立机构的数学模型,包括几何模型和运动学模型。
几何模型描述机构的几何形状和尺寸,而运动学模型则描述机构的位置、速度和加速度等运动参数。
然后,利用Matlab 进行数值计算和分析,以确定最优的设计参数。
具体来说,基于Matlab的平面连杆机构优化设计可以分为以下几个步骤:1.建立数学模型:根据实际问题,建立平面连杆机构的几何模型和运动学模
型,将实际问题转化为数学问题。
2.定义优化目标:根据设计要求,定义优化目标函数,如最小化某个性能参
数、最大程度满足某个约束条件等。
3.确定设计变量:选择影响优化目标的主要参数作为设计变量,如连杆长度、
角度等。
4.约束条件:根据实际应用需求和机构运动特性,定义约束条件,如角度范
围、位移范围等。
5.求解优化问题:利用Matlab的优化工具箱进行数值计算,求解优化问题,
得到最优设计方案。
6.结果分析和验证:对优化结果进行分析和验证,确保最优设计方案的有效
性和可行性。
总之,基于Matlab的平面连杆机构优化设计是一种通过数学建模和数值计算来寻求最优设计方案的方法。
它可以帮助设计师快速找到满足性能要求的设计方案,提高设计效率和产品质量。
基于MATLAB的平面连杆机构运动分析及动画毕业论文

基于MATLAB的平面连杆机构运动分析及动画摘要建立了平面机构运动分析的数学模型,利用MATLAB进行了编程并设计了计算交互界面进而求解,为解析法的复杂计算提供了便利的方法,此方法也同样适用于复杂平面机构的运动分析,并为以后机构运动分析的通用软件的设计提供了基础。
建立了平面四杆机构运动分析的数学模型,以MATLAB 程序设计语言为平台,将参数化设计与交互式相结合,设计了平面四杆机构仿真软件,该软件具有方便用户的良好界面,并给出界面设计程序,从而使机构分析更加方便、快捷、直观和形象。
设计者只需输入参数就可得到仿真结果,再将运行结果与设计要求相比较,对怎样修改设计做出决策,它为四杆机构设计提供了一种实用的软件与方法。
以一种平面六连杆为例建立了平面多连杆机构的运动分析数学模型,应用MATLAB 软件进行了优化设计和仿真分析,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面多连杆机构的分析设计能力。
同时,也为其他机构的仿真设计提供了借鉴。
关键词:解析法,平面连杆机构,MATLAB,运动分析,运动仿真Based on the MATLAB Planar Linkage Mechanism MotionAnalysis and AnimationABSTRACTThis article established the kinematical mathematic model of the planar mechanism ,which is programmed and solved with designing the mutual interface of the calculation by MATLAB.This convenient method is provided for the complicated calculation of the analysis and also applicable to the kinematical analysis of the complex planar mechanism.A mathematical model of motion analysis was established in planar four- linkage ,and emulational software was developed. The software adopted MATLAB as a design language. It combined parametric design with interactive design and had good interfacefor user. Thus,it was faster and more convenient to analyse linkage. The emulational result was obtained as soon as input parameters was imported and the devisers can make decision-making of modification by the comparing emulational result with design demand. It provides an applied software and method for linkage.This paper took a planar six-linkage mechanism as a example to set up the mathematics model of planar multi-linkage mechanisms, and made the optimization design and simulation by the MATLAB software. It gave a efficiently and directly method to optimization design of mechanisms, and improved the ability of analyzing and designing the planar multi-linkage mechanisms. At the same time, it also provides a use for reference to the design and simulation for other mechanisms.KEY WORDS: analysis, planar linkage mechanisms, MATLAB, kinematical analysis, kinematical simulation目录1.1 平面连杆机构的研究意义 (1)1.2 平面连杆机构的研究现状 (1)1.3 MATLAB软件介绍 (2)1.3.1 MATLAB简介 (2)1.3.2 MATLAB软件的特点 (4)1.3.3 用MATLAB处理工程问题优缺点 (5)第2章平面机构运动分析的复数矢量解 (6)第3章平面四杆机构运动分析 (8)3.1 铰链四杆机构曲柄存在条件 (8)3.2 平面四杆机构的位移分析 (9)3.3 平面四杆机构的速度分析 (14)3.4 平面四杆机构的加速度分析 (15)第4章基于MATLAB的平面四杆机构运动分析 (17)4.1 基于MATLAB的平面四杆机构运动参数输入界面 (17)4.2 基于MATLAB的平面四杆机构运动参数计算 (21)4.3 基于MATLAB的平面四杆机构运动分析界面 (24)4.4 基于MATLAB的平面四杆机构运动仿真 (26)4.5 基于MATLAB的平面四杆机构运动参数清空及退出 (30)第5章平面六杆机构运动分析 (32)5.1 构建平面六杆机构数学模型 (32)5.2 平面六杆机构的运动分析 (33)5.2.1 曲柄导杆机构的运动分析 (33)5.2.2 摆动滑块机构的运动分析 (36)第6章基于MATLAB的平面六杆机构运动分析 (39)6.1 基于MATLAB的平面六杆机构运动参数输入界面 (39)6.2 基于MATLAB的平面六杆机构运动参数计算 (45)6.3 基于MATLAB的平面六杆机构运动分析界面 (49)6.4 基于MATLAB的平面六杆机构运动仿真 (52)6.5 基于MATLAB的平面六杆机构运动参数清空及退出 (56)结论 (57)参考文献 (59)第1章前言1.1 平面连杆机构的研究意义机构运动分析是不考虑引起机构运动的外力的影响,而仅从几何角度出发,根据已知的原动件的运动规律(通常假设为匀速运动),确定机构其它构件上各点的位移、速度、加速度,或构件的角位移、角速度、角加速度等运动参数。
Matlab求解理论力学问题系列(二)典型机构的运动分析
—血內 sin(pi — «3^2 sin 巾 一QiS sin 0 = 0 ]
恋91 COS0 +COS02 + 如30 COS0 = 0
〉(5) j
由于0,0,02已在前面求出,因此得到关于內,02 的一组线性方程组。类似X=inv(A)*B可解出角速 度,从而可以获得角速度随时间或随6变化的关系 (图 5)。
步骤(4):类似一元函数的泰勒展开式,= f(xo) + f'(xo){x — X0) + o(x — ®0)> 多兀函数为
fi(x) = f,(x*) + J(x*)dx + o(dx)
1 Matlab中非线性方程的求解及动画演示
案例1:如图1,已知四连杆机构ABCD, AB 杆长为如,BC杆长为a2, CD杆长为a3, AD距离 为cm。若AB杆以匀角速度5转动,初始d0 = Oo 求BC和CD杆的角度、角速度变化规律。
编程计算得到角度的变化关系后,可以算出任 意时刻各较的位置,以及BC杆上不同点的运动轨 迹(图3):很明显B点轨迹是圆,C点轨迹是圆的 一部分(AB杆大范围运动时,CD杆只在小范围运 动),而在BC杆上不同的点轨迹就很复杂了。
各较点的位置并连接起来,就得到了四连杆机构在 某一时刻的图象,延迟一定的时间后再画出下一时 刻的图象,就形成了动画。本问题中动画的源代码 见图4,其中plot函数表示画线段;hl是句柄,定义
ai COS & + Q2 COS 01 + Q3 COS(P2 — «4 = 0 1 ⑴
ai sin 9 + 恋 sin 休 + sin 0 = 0
J
方程(1)是关于转角0和02的非线性方程组,通 常没有解析解,下面给出一般的处理方法。
[整理]Matlab课程作业—按给定轨迹设计平面连杆机构.
![[整理]Matlab课程作业—按给定轨迹设计平面连杆机构.](https://img.taocdn.com/s3/m/012a346eb52acfc788ebc959.png)
题目:按给定轨迹设计平面连杆机构A j A j 1j j 1A Ax Ay min max 12A A =30mm =20mm []=, []=180ϕϕϕγδγδγ=--︒︒︒-︒试设计一曲柄摇杆机构,再现给定轨迹上的个点。
给定轨迹点坐标及与此对应主动曲柄O 相对第一位置O 的转角,如表1所列, 固定铰接点O 的坐标O ,O ,许用传动角[]=40,即[]=40[]=140。
解:(1) 位移分析在右手直角坐标系中,角位移以逆时针方向为正,顺时针方向为负。
设给定机构尺寸及第j 个位置的转角j ϕ。
图1 铰链四杆机构由图1所示四边形A B O ABO 得 12031203 cos cos cos cos sin sin sin sin j j j j j jl l l l l l l l ϕθαψϕθαψ+=+⎧⎪⎨+=+⎪⎩,消去j θ后得,cos sin 0j j j j E F G ψψ++=将三角函数变换公式2221tan (/2)2tan(/2)cos , sin =1tan (/2)1tan (/2)j j j j j ψψψψψψ-=++代入上式,得到关于tan(/2)j ψ的一元二次方程式,解得j j jψ式中22223201013cos cos sin sin 2j j j j j j j E F l l E l l F l l G l αϕαϕ++-=-=-=,,则33sin =arctancos j j j j jF l E l ψθψ++对于连杆上点P ,有 1414cos cos()sin sin()jx Ax j j jy Ay j j P O l l P O l l ϕθβϕθβ=+++⎧⎪⎨=+++⎪⎩(2) 设计变量对平面铰链四杆机构,其连杆上某点最多能精确再现预定轨迹上的9个点,1j 121314ϕϕϕϕ结合表1中值,可知、和应为设计变量。
A B A B A AB B O O O O 、、、和AP的长度01234l l l l l 、、、和,以及1αβϕ、和均未知,也为设计变量。
机械原理matlab分析大作业3-28
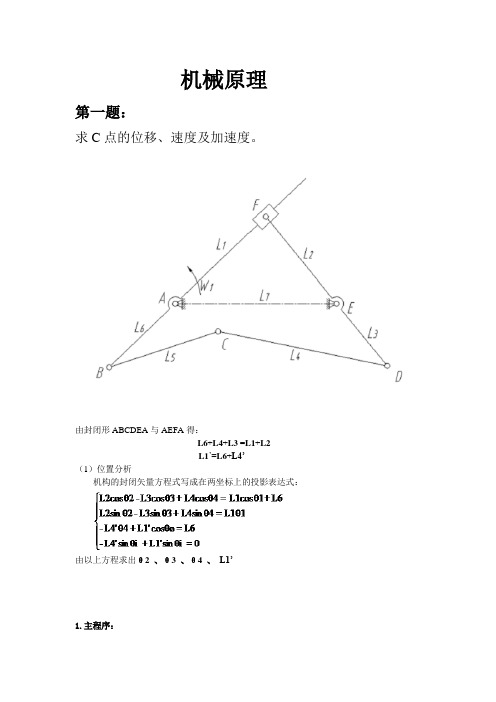
机械原理第一题:求C点的位移、速度及加速度。
由封闭形ABCDEA与AEFA得:L6+L4+L3 =L1+L2L1’=L6+L4’(1)位置分析机构的封闭矢量方程式写成在两坐标上的投影表达式:由以上方程求出θ2 、θ3 、θ4 、L1’1.主程序:%输入已知数据l2=60;l3=35;l4=75;l5=50;l6=40;l7=70;hd=pi/180;du=180/pi;omega1=10;alpha1=0;%调用子函数计算角位移,角速度及角加速度for n1=1:66 %曲柄转角范围theta1(n1)=(n1-1)*hd;ll=[l2,l3,l4,l5,l6,l7];[theta,omega,alpha]=six_bar(theta1(n1),omega1,ll);l1(n1)=theta(1);theta2(n1)=theta(2);theta4(n1)=theta(3);theta3(n1)=theta(4);v1(n1)=omega(1);omega2(n1)=omega(2);omega3(n1)=omega(3);omega4(n1)=omega(4);a1(n1)=alpha(1);alpha2(n1)=alpha(2);alpha3(n1)=alpha(3);alpha4(n1)=alpha(4);e nd%图像输出figure(1);n1=1:66;t=(n1-1)*2*pi/360;subplot(2,2,1);%滑块F线位移L1图像输出plot(theta1*du,l1,'k');title('L1线位移图');xlabel('角位移\theta_1/\circ')ylabel('线位移/mm')grid on;hold on;gtext('L1')pause(1);subplot(2,2,2);%theta2、theta3、theta4角位移图像输出plot(theta1*du,theta2*du,'g',theta1*du,theta3*du,'r',theta1*du,th eta4*du);title('\theta_2、\theta_3、\theta_4角位移图');xlabel('角位移\theta_1/\circ')ylabel('角位移/\circ')grid on;hold on;legend('\theta_2','\theta_3','\theta_4');pause(1);subplot(2,2,3);%滑块F的速度图像输出plot(theta1*du,v1,'k');title('滑块F的速度图');xlabel('角位移\theta_1/\circ')ylabel('速度/mm\cdots^{-1}')grid on;hold on;gtext('v1')pause(1);subplot(2,2,4);%滑块F的加速度图像输出plot(theta1*du,a1,'k');title('滑块F的加速度图');axis auto;xlabel('角位移\theta_1/\circ')ylabel('加速度/mm\cdots^{-2}')grid on;hold on;gtext('a1');pause(5);figure(2);subplot(1,2,1);%omega2、omega3和omega4角位移图像输出plot(theta1*du,omega2,'g',theta1*du,omega3,'r',theta1*du,omega4,' b');title('\omega_2、\omega_3、\omega_4角速度图');axis auto;grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('角速度/rad\cdots^{-1}')box on;legend('\omega_2','\omega_3','\omega_4');pause(1);subplot(1,2,2);%alpha2、alpha3和alpha4角加速度图像输出plot(theta1*du,alpha2,'g',theta1*du,alpha3,'r',theta1*du,alpha4,' b');title('\alpha_2、\alpha_3、\alpha_4角加速度图');axis auto;grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('角加速度/rad\cdots^{-2}')box on;legend('\alpha_2','\alpha_3','\alpha_4');pause(5);figure(3);xC=-l6*cos(theta1+pi)+l5*cos(theta3);yC=l6*sin(theta1+pi)+l5*sin(theta3);% rC=sqrt(xC.*xC+yC.yC)vCX=-omega1*l6*sin(theta1+pi)-omega3*l5.*sin(theta3);vCY=omega1*l6*cos(theta1+pi)+omega3*l5.*cos(theta3);% v3=sqrt(vCX.*vCX+vCY.*vCY);subplot(2,2,1);hold on;grid on;%C点x、y方向位移图像输出plot(theta1*du,xC,'r',theta1*du,yC);axis auto;hold on;grid on;title('C点位移图');xlabel('角位移\theta_1/\circ')ylabel('位移/mm')grid on;hold on;legend('xC','yC');pause(1);subplot(2,2,2);grid on;hold on;%C点x、y方向速度图像输出plot(theta1*du,vCX,'k',theta1*du,vCY);title('C点速度图');xlabel('角位移\theta_1/\circ')ylabel('速度/mm\cdots^{-1}')legend('vCX','vCY');pause(1);aCX=omega1*omega1*l6*cos(theta1)-omega3.*omega3.*l5.*cos(theta3)-alpha3.*l5.*sin(theta3);aCY=omega1*omega1*l6*sin(theta1)-omega3.*omega3.*l5.*sin(theta3)+ alpha3.*l5.*cos(theta3);%a3=sqrt(aCX.*aCX+aCY.*aCY);subplot(2,2,3);%C点x、y方向加速度图像输出plot(theta1*du,aCX,'r',theta1*du,aCY,'b');title('C点加速度图');grid on;hold on;xlabel('角位移\theta_1/\circ')ylabel('加速度/mm\cdots^{-2}')box on;legend('aCX','aCY');%主程序结束2.子程序:%子函数function[theta,omega,alpha]=six_bar(theta1,omega1,ll)l2=ll(1);l3=ll(2);l4=ll(3);l5=ll(4);l6=ll(5);l7=ll(6);%1.计算角位移和线位移l1=l7*cos(theta1)+sqrt((l7*cos(theta1))*(l7*cos(theta1))-l7*l7+l2 *l2);theta2=asin((l1*sin(theta1))/l2);A=2*l4*(l6*sin(theta1)-l3*sin(theta2).*sin(theta2));B=2*l4*(l6*cos(theta1)+l7-l3*cos(theta2));C=l4*l4-l5*l5+l6*l6+l7*l7+l3*l3-2*l3*l6*(cos(theta1)*cos(theta2)+ sin(theta1)*sin(theta1))-2*l7*l3*cos(theta2)+2*l6*l7*cos(theta1); theta4=2*atan((A+sqrt(A.*A+B.*B-C.*C))/(B-C));theta3=asin((l6*sin(theta1)+l4*sin(theta4)-l3*sin(theta2))/l5); theta(1)=l1;theta(2)=theta2;theta(3)=theta4;theta(4)=theta3;%2利用矩阵计算角速度和线速度D=[-l5*sin(theta3),l4*sin(theta4),-l3*sin(theta2+pi),0l5*cos(theta3),-l4*cos(theta4),-l3*cos(theta2+pi),00,0,l2*sin(theta2),cos(theta1)0,0,-l2*cos(theta2),sin(theta1)];E=[l6*sin(theta1+pi);-l6*cos(theta1+pi);l1*sin(theta1);-l1*cos(theta1)];omega=D\(omega1*E);v1=omega(4);omega2=omega(3);omega3=omega(1);omega4=omega(2);%3利用矩阵计算角加速度和加速度Dt=[-l5*omega3*cos(theta3),l4*omega4*cos(theta4),-l3*omega2*cos(t heta2),0-l5*omega3*sin(theta3),l4*omega4*sin(theta4),-l3*omega2*sin(theta 2),00,0,l2*omega2*cos(theta2),-omega1*sin(theta1)0,0,l2*omega2*sin(theta2),omega1*cos(theta1)];Et=[l6*omega1*cos(theta1);l6*omega1*sin(theta1);l1*omega1*cos(theta1)+v1*sin(theta1);l1*omega1*sin(theta1)-v1*cos(theta1)];alpha=D\(-Dt*omega+omega1*Et);a1=alpha(4);alpha2=alpha(3);alpha3=alpha(1);alpha4=alpha(2);%3子程序结束3.图像输出:%1.滑块F线位移L1图像输出%2.theta2、theta3、theta4角位移图像输出%3.滑块F的速度图像输出%4.滑块F的加速度图像输出%5.omega2、omega3和omega4角位移图像输出%6.alpha2、alpha3和alpha4角加速度图像输出%7.C点x、y方向位移图像输出%8.C点x、y方向速度图像输出%9.C点x、y方向加速度图像输出。
平面连杆机构运动分析&动态静力分析及机械运动方程求解的Matlab语言m文件使用说明及算例

构件上点的运动分析函数文件(m文件)格式:function [ 输出参数] = 函数名(输入参数)p_crank.m function [p_Nx,p_Ny]=p_crank(Ax,Ay,theta,phi,l1)v_crank.m function [v_Nx,v_Ny]=v_crank(l1,v_Ax,v_Ay,omiga,theta,phi)a_crank.m function [a_Nx,a_Ny]=a_crank(l1,a_Ax,a_Ay,alpha,omiga,theta,phi)函数中的符号说明函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RRR.m function [cx,cy,theta2,theta3]=p_RRR(bx,by,dx,dy,l2,l3,m)v_RRR.m function [vcx,vcy,omiga2,omiga3]=v_RRR(vbx,vby,vdx,vdy,cx,cy,bx,by,dx,dy)a_RRR.m function [acx,acy,alpha2,alpha3]=a_RRR(abx,aby,adx,ady,cx,cy,bx,by,dx,dy,omiga2,omiga3)函数中的符号说明m =1 m = -1RRR Ⅱ级杆组运动分析函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RRP.m function [cx,cy,sr,theta2]=p_RRP(bx,by,px,py,theta3,l2,m)v_RRP.m function [vcx,vcy,vr,omiga2]=v_RRP(bx,by,cx,cy,vbx,vby,vpx,vpy,theta2,theta3,l2,sr,omiga3) a_RRP.m function [acx,acy,ar,alpha2]=a_RRP(bx,by,cx,cy,px,py,abx,aby,apx,apy,theta3,vr,omiga2,omiga3,alpha3)函数中的符号说明1 1∠BCP < 90︒,∠BC 'P > 90︒,m =1RRP Ⅱ级杆组运动分析函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )p_RPR.m function [dx,dy,sr,theta3]=p_RPR(bx,by,cx,cy,e,l3,m)v_RPR.m function [vdx,vdy,omiga3,vr]=v_RPR(bx,by,cx,cy,dx,dy,vcx,vcy,vbx,vby,theta3) a_RPR.m function [adx,ady,alpha3,ar]=a_RPR(bx,by,cx,cy,dx,dy,acx,acy,abx,aby,vr,omiga3,theta3)RPR Ⅱ级杆组运动分析实线位置,m =1 虚线位置,m = -1函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RRR.m function [R12x,R12y,R23x,R23y,R34x,R34y]=F_RRR(bxy,cxy,dxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,as2,as3,alpha2,alpha3)RRR Ⅱ级杆组力分析R 23xF 2R F 3xR 23函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RRP.m function [R12x,R12y,R23x,R23y,R34x,R34y,lcn]=F_RRP(bxy,cxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,theta3,as2,as3,alpha2,alph3)RRP Ⅱ级杆组力分析R 34函数文件(m 文件)格式: function [ 输出参数 ] = 函数名( 输入参数 )F_RPR.m function [R12x,R12y,R23x,R23y,R35x,R35y,lcn]=F_RRP(bxy,cxy,dxy,s2,s3,m2,m3,Js2,Js3,M2,M3,F2,F3,R34,theta3,as2,as3,alpha3)RPR Ⅱ级杆组力分析238. 作用有平衡力的构件力分析作用有平衡力的构件力分析函数文件(m文件)格式:function [ 输出参数] = 函数名(输入参数)F_Bar.m function [R01x,R01y,Mb]=F_Bar(axy,bxy,s1,m1,Js1,M1,F1,R12,as1,alpha1)函数中的符号说明9. 平面连杆机构运动分析算例例1图示曲柄摇杆机构,已知l 1=150mm ,l 2=220mm ,l 3=250mm ,l 4=300mm ,曲柄以n 1=100r/min 逆时针匀速转动,分析该机构的运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
w3
w1L1 sinθ1
w4
+ w1 w1L’1cosθ1+v sinθ1
L’1
w1L’1 sinθ1+v cosθ1
0 0 -w1sinθ1 -w1cosθ1
acx= w12L1cosθ1 -
w2 2
L2cosθ2
-
a2L2sinθ2
acy= w12L1 sinθ1 -
w2 2
L2
sinθ2
+a2
norm(f); end; y(1)=lA; y(2)=theta2; y(3)=theta3; y(4)=theta4;
再进行数据输入,运行程序进行运算。这里我们根据上面分析的θ1 的极限 位置取θ1 的范围为 40°~55°并均分成 15 个元素: clc
clear x1=linspace(40*pi/180,55*pi/180,15); x=zeros(length(x1),11); for n=1:15 x(n,:)=[x1(:,n) pi/6 8*pi/9 2*pi/3 40 50 75 35 70 75 60]; end p=zeros(length(x1),4); for k=1:15 y= rrrposi(x(k,:)); p(k,:)=y; end >> p
lA=x(10) % epsilon=1.0E-6; % f=[x(6)*cos(theta2)-x(7)*cos(theta3)-x(8)*cos(pi+theta4)+ x(5)...
*cos(x(1)+pi)-x(9);
x(6)*sin(theta2)-x(7)*sin(theta3)-x(8)*sin(theta4+pi)+... x(5)*sin(x(1)+pi); -x(11)*cos(theta4)+lA*cos(x(1))-x(9); -x(11)*sin(theta4)+lA*sin(x(1))];
平面连杆机构运动学分析
3-15
已知:LAE=70mm,LAB=40mm,LEF=60mm,LDE=35mm,LCD=75mm,LBC=50mm,
原动件以等角速度 wБайду номын сангаас=10rad/s 回转。试以图解法求在θ1=50°时 C 点的速度 VC
和
加
速
度
ac.
先对机构进行位置分析: 由封闭形 ABCDEA 与 AEFA 有: L1+L2=L6+L3+L4 L’1=L6+L’4 即 L2-L3-L4=-L1+L6 -L’4+L’1=L6
根据第一步得到的数据进行数据输入,运行程序计算各速度值。程序如下:
x2=[x1' p(:,2) p(:,3) p(:,4) 10*ones(15,1) 40*ones(15,1) 50*ones(15,1)... 75*ones(15,1) 35*ones(15,1) 70*ones(15,1) p(:,1) 60*ones(15,1)]; q=zeros(4,15); for m=1:15 y2=rrrvel(x2(m,:)); q(:,m)=y2; end q
-0.0059 0.0105
0.0247 -1.2302
-0.0059 0.0109
0.0250 -1.2704
-0.0058 0.0114
0.0255 -1.3137
Columns 9 through 15
-0.0058 -0.0059 -0.0060 -0.0062 -0.0065 -0.0069 -0.0078 0.0119 0.0125 0.0131 0.0139 0.0148 0.0159 0.0175 0.0259 0.0265 0.0272 0.0281 0.0292 0.0306 0.0327 -1.3610 -1.4136 -1.4734 -1.5431 -1.6273 -1.7337 -1.8767 程序运行得到 q 矩阵,第一行到第三行分别是 a2、a3、a4 的值,第四行是杆 AF 上 滑块运动的速度,即 F 点的速度。
% while norm(f)>epsilon
J=[0 -x(6)*sin(theta2) x(7)*sin(theta3) -x(8)*sin(theta4);
0 x(6)*cos(theta2) -x(7)*cos(theta3) x(8)*cos(theta4);
cos(x(1)) 0 0 x(11)*sin(theta4); sin(x(1)) 0 0 -x(11)*cos(theta4)]; dth=inv(J)*(-1.0*f); lA=lA+dth(1); theta2=theta2+dth(2); theta3=theta3+dth(3); theta4=theta4+dth(4);
%x(8)=l3 %x(9)=l4 %x(10)=l6 %x(11)=lA %x(12)=lB % %Outout parameters % %y(1)=V %y(2)=dtheta-2 %y(3)=dtheta-3 %y(4)=dtheta-4 % A=[-x(7)*sin(x(2)) x(8)*sin(x(3)) x(9)*sin(pi+x(4)) 0;
q=
1.0e+003 *
Columns 1 through 8
-0.0064 -0.0062 -0.0061 0.0085 0.0089 0.0092 0.0235 0.0237 0.0239 -1.0578 -1.0897 -1.1226
-0.0061 0.0096 0.0241 -1.1568
-0.0060 0.0101 0.0244 -1.1926
Yc= L1sin(θ1+180°) +L2 sinθ2
(2)速度方程
-L2sinθ2 L3sinθ3 L4cos(θ4+180°)
0
w2
L2cosθ2 -L3cosθ3 -L4cos(θ4+180°)
0
w3
0
0
L’4sinθ4
cosθ1
w4
0
0
-L’4cosθ4
sinθ1
L’1
L1sin(θ1+180°)
f=[x(6)*cos(theta2)-x(7)*cos(theta3)-x(8)*cos(pi+theta4)+ x(5)...
*cos(x(1)+pi)-x(9);
x(6)*sin(theta2)-x(7)*sin(theta3)-x(8)*sin(theta4+pi)+... x(5)*sin(x(1)+pi); -x(11)*cos(theta4)+lA*cos(x(1))-x(9); -x(11)*sin(theta4)+lA*sin(x(1))];
(1)位置方程
L2cosθ2-L3cosθ3-L4cos(θ4+180°)=-L1cos(θ1+180°)+L6
L2sinθ2-L3sinθ3-L4sin(θ4+180°)=-L1sin(θ1+180°)
-L’4cosθ4+ L’1cosθ1=L6
- L’4sinθ4+ L’1sinθ1=0
Xc=L1cos(θ1+180°)+L2cosθ2
=
-L1cos(θ1+180°)
L’1 sinθ1
-L’1cosθ1
Vcx= -L1w1sin(θ1+180°)-w2 L2sinθ2 Vcy=Lw2cos(θ1+180°)+ w2 L2cosθ2
(3)加速度方程
-L2sinθ2 L3sinθ3
- L4sinθ4
0
a2
L2cosθ2 -L3cosθ3
L4cosθ4
0
a3
0
0
L’4sinθ4
cosθ1
a4
0
0
-L’4cosθ4
sinθ1
L’’1
=-
- w2 L2cosθ2 w3 L3cosθ3 -w4L4cosθ4
-w2 L2sinθ2 - w3 L3sinθ3
-w4L4sinθ4
0
0
w4L’4cosθ4
0
0
w4L’4sinθ4
w2
w1L1cosθ1
p= 93.3149 0.7163 2.5455 1.5461 91.3071 0.7045 2.5617 1.5902 89.2387 0.6929 2.5786 1.6347 87.1076 0.6815 2.5963 1.6796 84.9113 0.6703 2.6147 1.7250 82.6463 0.6592 2.6339 1.7709 80.3086 0.6482 2.6539 1.8174 77.8931 0.6372 2.6747 1.8646 75.3930 0.6263 2.6965 1.9126 72.7998 0.6154 2.7192 1.9616 70.1019 0.6043 2.7431 2.0118 67.2833 0.5930 2.7683 2.0635 64.3217 0.5812 2.7950 2.1169 61.1835 0.5687 2.8237 2.1728 57.8153 0.5551 2.8549 2.2319