倾角传感器z轴数据计算
工程倾角传感器解决方案
工程倾角传感器解决方案引言工程倾角传感器是一种用于测量物体相对于地面的倾斜角度的传感器。
它可以帮助工程师和技术人员在建筑、道路建设、机械设备等领域准确地测量倾斜角度。
本文将介绍工程倾角传感器的工作原理、应用领域、解决方案等内容。
工程倾角传感器的工作原理工程倾角传感器主要基于MEMS技术(微机电系统技术)或倾角传感器芯片来实现。
该传感器能够通过内部的倾斜角度检测装置,测量物体相对于地面的倾斜角度。
倾角传感器主要由加速度计、陀螺仪和磁罗盘等部件组成,它们能够对三轴加速度、三轴角速度和三轴磁场进行监测,并通过算法计算出物体的倾斜角度。
工程倾角传感器的应用领域工程倾角传感器主要应用于以下几个领域:1. 建筑工程:在建筑工程中,工程倾角传感器可以用于测量墙体、地面、天花板等部件的倾斜角度,以确保建筑物的结构和平衡性。
2. 机械设备:在机械设备领域,工程倾角传感器可以用于测量各种设备的倾斜角度,如吊车、挖掘机、铲车等,以确保其工作平稳、安全。
3. 道路建设:在道路建设中,工程倾角传感器可以用于测量路面的倾斜角度,以确保道路平整度和排水系统的设计。
4. 水利工程:在水利工程中,工程倾角传感器可以用于监测水坝、堤坝等水利设施的倾斜情况,以预防地质灾害。
工程倾角传感器的解决方案工程倾角传感器的解决方案主要包括传感器选型、安装调试、数据采集分析等环节。
1. 传感器选型选择合适的工程倾角传感器对于确保测量精度至关重要。
工程师需要根据测量的精度要求、工作环境、通信协议等因素选取合适的传感器型号。
常见的工程倾角传感器有MEMS倾斜传感器、倾角测量仪、倾角传感器模块等,其测量精度一般可达0.1度至0.01度。
2. 安装调试工程倾角传感器的安装位置和安装角度对测量结果具有重要影响。
在安装时,需要确保传感器与被测物体平面垂直安装,并调试传感器的零位和灵敏度,以及校准传感器的零点漂移。
3. 数据采集分析工程倾角传感器通常具有模拟输出、数字输出或模拟数字混合输出等多种输出方式。
G10 倾斜传感器校正原理

G10 倾斜传感器校准校准原理如下图所示,坐标轴-北方向为X轴,东方向方为Y轴,a为对中杆倾斜后的投影与北方向的夹角,a=磁方位角+磁偏角,所以磁偏角的大小会影响投影方位角的大小,即影响到倾斜改正的计算。
图1例如图1中在第一象限(东北),如磁偏角变大,会导致X坐标值变小,与坐标值增大。
同理得出表一的结论。
注:X,Y是平面X,Y方向坐标 , + ,- 是倾斜测出坐标值比中心坐标值偏大或者偏小若东南向和西北向出现一个正一个负的情况,那磁偏角就基本不用做调整了。
调整参考举例:杠高2m,倾斜30°,发现东南方向倾斜测出的坐标与中心点对比X,Y坐标分别偏大6cm,3cm,此时增加磁偏角3°,重新测试观察是否有改善。
校准的目的是测出磁北方向和真北方向的夹角,是将东南西北四个方向求出的四个磁偏角进行平均(当最大值与最小值的差在3°以内才能通过校准),软件会将这个平均值设置为传感器的磁偏角。
要注意的问题,除了要在磁步进要求的环境外,还需要一个近距离的基站(-1Km)。
同时,软件保留了磁偏角的自定义设置功能,通过这个功能我们可以对磁偏角进行调整,甚至可以不通过东南西北采集直接推算出磁偏角来。
校准步骤校准前仪器准备:手簿(中安装好配套的esurvey2.0软件)、气泡无偏差的对中杆、近距离的基站(磁偏角的校正仪器必须为固定解状态)、MINI转台、快速释放器图0-1 P7手簿图0-2 MINI转台图0-3 快速释放器注意事项:每块电池都必须进行倾斜传感器校准整个校准过程包括:1、电子气泡校准2、磁步进校准3、磁偏角校准4、测量点采集验证1、电子气泡校准流程:1)配置-系统设置-倾斜改正(电子气泡)图1-12)校正-磁北校准-水平校准图1-23)对中杆气泡居中后,点击“校正”按钮,听到提示音表示气泡校准完成,此时电子气泡和对中杆气泡同时居中。
图1-34)校准完成:图1-42、磁步进校准流程:A、校正–磁北校准–磁步进校准图2-1B、记录竖直数据:1)校正–磁北校准–磁步进校准2)记录竖直数据:MINI转台安装如图所示以对中杆为轴匀速进行旋转(同一方向),旋转熟读不超过15°/s,数据采集完成后会听到提示音。
倾角传感器-矿用倾角传感器使用说明书

GUD90矿用本安型倾角传感器产品使用说明书2013年1月5日目录1. 概述 (3)1.1 主要用途及使用范围 (3)1.2 型号组成及代表意义 (3)1.3 使用环境条件 (3)2 结构特征与工作原理 (3)2.1 结构 (3)2.2 工作原理 (4)3 技术特性 (4)3.1 产品执行标准 (4)3.2 主要性能 (4)3.3 主要参数 (4)3.4尺寸重量 (4)3.4.1 尺寸 (4)3.4.2 重量 (4)4 安装、调试 (4)4.1 安装条件、技术要求 (4)5 使用、操作 (5)6 故障分析与排除 (5)7 注意事项 (5)8 运输、贮存 (6)9 开箱及检查 (6)10 订货 (6)使用本产品前,请详细阅读本说明书。
GUD90矿用本安型倾角传感器1.概述1.1主要用途及使用范围矿用本安型倾角传感器主要用于对煤矿井下工作面的液压支架的倾斜角度进行采集,并将采集到的角度以电流信号的方式传给液压支架控制分站。
1.2型号组成及代表意义1.3使用环境条件——环境温度-5℃~40℃;——海拔高度不超过2000m;——空气相对湿度不大于95%(25℃时);——在有瓦斯、煤尘爆炸危险的场所;——在无破坏绝缘的腐蚀性气体或蒸汽的场所;——在无显著振动和冲击的场所;——污染等级为3级;——安装类别为Ⅲ类。
2结构特征与工作原理2.1结构图1 结构图2.2工作原理指示环固定在液压支架上,当液压支架位移发生变化时带动指示环前后动作,指示环上封装有磁铁,在传感器杆体每0.05m处分别装有干黄管,当磁铁接近干簧管时,导致干簧管接通。
3技术特性3.1产品执行标准本产品执行标准GB3836-2010、Q/0104ZMD052—2013。
3.2主要性能--输入电压:DC12V;--工作电流:20mA;3.3主要参数3.3.1 X轴测量范围:-90°~+90°3.3.2 Y轴测量范围:-90°~+90°3.3.3 本安参数:a)Ui: 12V, Ii: 20mA;b)Ci: 0 nF, Li: 0 mH。
倾角传感器技术参数

倾角传感器的技术参数包括测量范围、测量精度、分辨率、测量方向、时间漂移、更新时间、上电启动时间、电源电压、信号输出、静态工作电流等。
此外,倾角传感器的技术参数还包括灵敏度误差、非线性、横轴误差、重复测量精度、温漂等。
具体来说,灵敏度误差取决于核心敏感器件的自身特性,与频率响应有关;非线性可以通过后续校正,取决于校正点的多少;横轴误差是指当传感器垂直于其灵敏轴方向施加一定的加速度或者倾斜一定的角度时耦合到传感器的输出信号上所产生的误差;重复测量精度取决于核心敏感器件的自身特性,不能通过后续修正措施来提高;温漂受温度影响半导体元器件会发生一些参数上的变化,会影响到传感器的测量精度和可靠性。
倾角传感器说明

77
8BΒιβλιοθήκη 00: 设置成功FF: 设置失败
注:00 表示 2400 01 表示 4800 02 表示 9600 03 表示 19200,默认值为 9600.
校验和 (1byte)
校验和 (1byte)
2.6 设置应答模式
发送命令: 77 05 00 0C 00 11
标示符 (1byte)
数据长度 (1byte)
命令字 (1byte)
8E
数据域 (1byte) 00: 设置成功 FF: 设置失败
校验和 (1byte)
校验和 (1byte)
2.10update flash(设置保存)
发送命令: 77 04 00 0A 0E 0D 0A
标示符 (1byte)
77
数据长度 (1byte)
地址码 (1byte)
应答命令:
标示符 (1byte)
77
数据长度 (1byte)
地址码 (1byte)
应答命令:
命令字 (1byte)
0B
数据域 (1byte) 00:2400 01 :4800 02:9600 03:19200
标示符
数据长度
地址码
命令字
数据域
(1byte)
(1byte)
(1byte)
(1byte)
(1byte)
2.7 设置地址模块
发送命令: 77 05 00 0F 01 15 0D 0A
标示符 (1byte)
77
数据长度 (1byte)
地址码 (1byte)
应答命令:
标示符 (1byte)
77
数据长度 (1byte)
地址码 (1byte)
mems 计算倾角
mems 计算倾角用MEMS计算倾角MEMS(Micro-Electro-Mechanical Systems)是一种微型电子机械系统,通常由微型传感器、微处理器和微机械组件组成。
在工程和科学领域,MEMS被广泛应用于测量和控制应用中。
其中一个常见的应用是测量物体的倾角或倾斜度。
本文将介绍如何使用MEMS 计算倾角,并探讨一些相关的技术和应用。
我们需要了解MEMS传感器的工作原理。
MEMS传感器通常基于微机械系统的变形或位移来测量物体的倾角。
常见的MEMS传感器包括加速度计和陀螺仪。
加速度计用于测量物体的线性加速度和倾斜度,而陀螺仪用于测量物体的角速度和旋转。
借助MEMS传感器,我们可以计算物体的倾角。
倾角是物体相对于重力矢量的角度。
传统上,倾角可以通过使用水平仪或倾斜仪来测量。
然而,现代技术的发展使得使用MEMS传感器更为方便和准确。
要计算倾角,我们首先需要获取MEMS传感器的输出数据。
这些数据通常以数字信号的形式提供,可以通过连接传感器到微处理器或电脑来获取。
接下来,我们需要将这些数字信号转换为物体的倾角。
对于加速度计,我们可以使用三轴加速度计的输出数据来计算物体的倾角。
通过测量物体在三个方向上的加速度,我们可以计算出物体相对于重力的倾角。
这可以通过应用三角函数来实现。
具体而言,我们可以使用反正切函数来计算物体在水平方向和垂直方向上的倾角。
然后,我们可以使用这些倾角来计算物体的综合倾角。
对于陀螺仪,我们可以使用其输出的角速度数据来计算物体的倾角。
通过积分陀螺仪的角速度数据,我们可以获得物体相对于初始位置的旋转角度。
然后,我们可以使用这个旋转角度来计算物体的倾角。
除了计算倾角,MEMS传感器还可以用于其他应用,如姿态控制和导航。
通过结合加速度计和陀螺仪的输出数据,我们可以实现更精确的姿态控制和导航。
例如,在飞行器中,MEMS传感器可以用于测量飞行器的姿态和方向,从而实现准确的飞行控制。
总结起来,MEMS传感器是一种用于测量倾角和姿态的微型电子机械系统。
倾角传感器
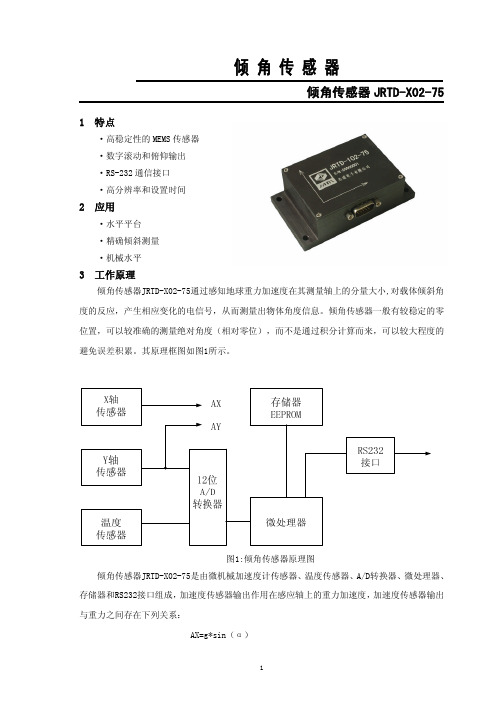
倾角传感器JRTD-X02-751特点·高稳定性的MEMS传感器·数字滚动和俯仰输出·RS-232通信接口·高分辨率和设置时间2应用·水平平台·精确倾斜测量·机械水平3工作原理倾角传感器JRTD-X02-75通过感知地球重力加速度在其测量轴上的分量大小,对载体倾斜角度的反应,产生相应变化的电信号,从而测量出物体角度信息。
倾角传感器一般有较稳定的零位置,可以较准确的测量绝对角度(相对零位),而不是通过积分计算而来,可以较大程度的避免误差积累。
其原理框图如图1所示。
AY=g*sin(β)其中AX、AY代表加速度传感器输出,g是以重力作为参考的加速度值,α、β是倾角。
α=sin-1(AX/g)β=sin-1(AY/g)加速度传感器输出的模拟信号经A/D转换器变换成数字信号,由微处理器进行计算出倾角α、β,通过RS232接口输出。
加速度传感器的灵敏度和零点漂移随着工作温度的变化而发生变化,但是这个变化是有规律的,加速度传感器的灵敏度随着温度的升高而减少,零点漂移随着温度的升高而增加或减少,倾角传感器内部增加一个温度传感器,对灵敏度和零点漂移进行补偿,由微处理器进行矫正,由于用微处理器会占用大量CPU时间和资源,节省资源常用EEPROM进行查表方法实现。
4技术指标倾角传感器JRTD-102-75技术指标如表1所示。
性能指标JRTD-102-75JRTD-202-75单位备注精度±0.4±0.2º()常温25ºC 角度范围±75±75(º)水平方向角度飘移w/Temp 1.50.7(º)达到±20ºC倾角角度分辨率0.0320.032(º)设定时间0.140.14s零位角度补偿<0.5<0.5(º)非线性度(±45º)<11%<0.3%常温25ºC 横向灵敏度1%1%典型值温度范围0~+700~+85ºCRS2329600bps9600bps bps电源电压8~308~30VDC电源电流6060mA外型尺寸10.21X5.74X3.1510.21X5.74X3.15cm重量9090g5外型结构倾角传感器JRTD-X02-75的外型结构如图2所示。
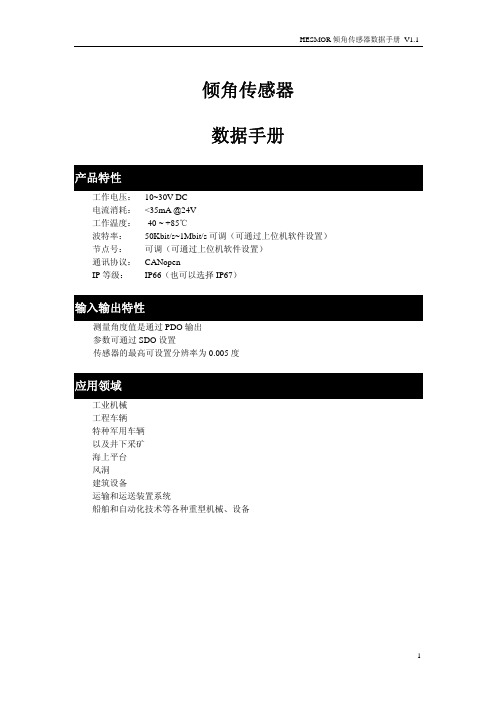
HESMOR倾角传感器数据手册
COB-ID
Byte0 Byte1 Byte2 Byte3 Byte4 Byte5 Byte6 Byte7
0x600+Node-ID 0x2f 0xf0 0x20 0x00 data
-
-
-
data:代表要写入的节点 ID 号,取值范围应在 1~ 127 的范围内。注意,一定不要将 ID
号设置成 0 和大于 127 的值
0x580+Node-ID 0x60 0xf2 0x20 0x00
-
-
-
-
如果返回的数据是其它的说明没有写成功。
3
HESMOR 倾角传感器数据手册 V1.1
节点 ID 的设置
在 CAN 通讯网络系统中每个 CAN 通讯的模块都应该分配一个独立的节点 ID 号。默认 节点 ID 号为 0x20(即 0d32)。
倾角数据输出格式
X、Y 轴数据以及温度输出格式
COB-ID
Byte0 Byte1 Byte2 Byte3 Byte4 Byte5 Byte6
0x180+Node-ID XData0 XData1 Ydata0 Ydata1 Tdata0 0x00
-
说明:
XData0、Xdata1 代表 X 轴的数据,XData0 代表低字节、Xdata1 代表高字节 YData0、Ydata1 代表 Y 轴的数据,YData0 代表低字节、Ydata1 代表高字节 Tdata0 代表温度值 Byte5 是输出常数 0x00
0x03
0=1000Kbps 1=500Kbps 2=200Kbps(注) 3=250Kbps 4=125Kbps 5=100Kbps 6=50Kbps 7~0xff 无定义 说明:200Kbps 是用户
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倾角传感器z轴数据计算
倾角传感器是一种测量物体倾斜角度的传感器。
它通常由三个轴组成,分别是x轴、y轴和z轴。
本文将重点讨论倾角传感器中的z 轴数据计算。
我们需要了解什么是倾角。
倾角是指物体相对于水平面或垂直面的倾斜程度。
在三维空间中,倾角可以分为水平倾角和垂直倾角。
水平倾角是物体相对于水平面的倾斜程度,而垂直倾角是物体相对于垂直面的倾斜程度。
倾角传感器可以通过测量物体在x轴和y轴方向上的加速度来计算出水平倾角和垂直倾角。
在倾角传感器中,z轴通常与重力方向垂直。
因此,z轴上的加速度可以用来计算出垂直倾角。
假设z轴上的加速度为az,重力加速度为g,那么垂直倾角θ可以通过以下公式计算得出:
θ = arcsin(az / g)
其中,arcsin为反正弦函数,用来计算正弦值为az / g时的角度。
这个公式基于以下原理:当物体处于平衡状态时,z轴上的加速度与重力加速度大小相等,因此az / g的值可以表示物体的倾斜程度。
在实际应用中,倾角传感器通常会输出倾角的数值,而不是加速度的数值。
这是因为倾角传感器内部已经进行了数据转换和处理,将加速度转换为了倾角。
因此,我们可以直接从传感器中读取z轴的
倾角数据,而无需进行额外的计算。
倾角传感器的z轴数据计算可以应用于许多领域。
例如,在建筑工程中,倾角传感器可以用来测量建筑物的倾斜程度,以确保建筑物的稳定性。
在航空航天领域,倾角传感器可以用来测量飞机或火箭的倾斜角度,以确保飞行的平稳和安全。
在机器人技术中,倾角传感器可以用来帮助机器人保持平衡,避免倾倒。
总结起来,倾角传感器的z轴数据计算是通过测量物体在z轴方向上的加速度来计算垂直倾角的。
倾角传感器可以广泛应用于各个领域,用来测量物体的倾斜角度。
通过倾角传感器,我们可以更好地了解和控制物体的倾斜状态,从而提高安全性和稳定性。