由坐标反算出路线里程桩号在工程测量中的应用
工程坐标系在施工测量中的应用
工程坐标系在施工测量中的应用作者:张涛来源:《城市建设理论研究》2012年第35期摘要:工程坐标系的选择是施工测量的重要问题,工程坐标系统选择的得当与否直接影响施工控制测量的精度。
关键词:工程坐标系、选择、分析、Abstract: Engineering the choice of the coordinate system is the important issue of the construction survey works selected coordinate system properly or not directly affect the measurement accuracy of the construction control.Keywords: engineering coordinate system, select, analyze中图分类号:P226+.3 文献标识码:A 文章编码:一.工程坐标系统的理解所谓坐标系指的是描述空间位置的表达形式,即采用什么方法来表示空间位置。
如直角坐标系、极坐标系等。
在测量中,常采用的坐标系有空间直角坐标系、空间大地坐标系、平面直角坐标系等。
工程坐标系属于平面直角坐标系。
按《工程测量规范》要求,控制测量的坐标系统应满足在测区内投影长度变形值不大于2.5cm/km。
我国采用统一的高斯正形投影3。
带或6。
带平面直角坐标系统。
主要是满足中小比例尺地形图基础测量工作。
比如3。
带坐标系统,当测区处在3。
带边缘地带,投影长度变形值远大于2.5cm/km,而工程测量总为工程建设服务的。
因此工程建设首先必需建立工程坐标系统。
工程坐标系统应与国家坐标系统宜一致,以便于互相利用方面来考虑。
但是从以上数据来看,地区高程若大于160m或其平面位置离开统一3。
带的主子午线的东西方向距离(横坐标)若大于45km,其长度变形均超过规定的1/40000,这时应采取适当的措施。
线路上点坐标反算其里程桩号及中桩距
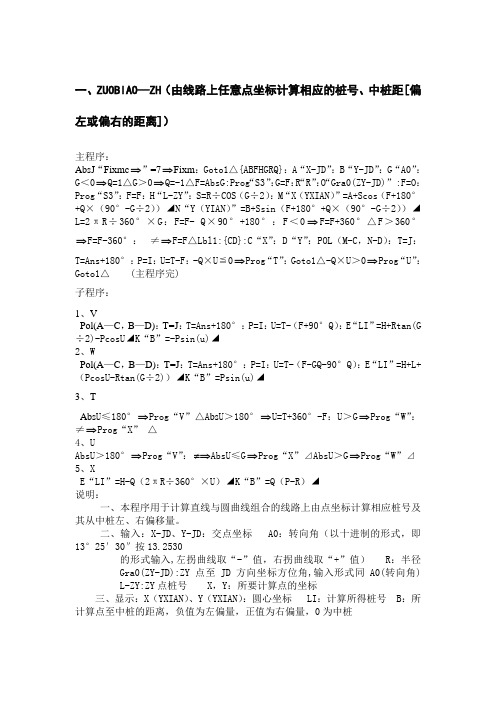
一、ZUOBIAO—ZH(由线路上任意点坐标计算相应的桩号、中桩距[偏左或偏右的距离])主程序:AbsJ“Fixmc⇒”=7⇒Fixm:Goto1△{ABFHGRQ}:A“X-JD”:B“Y-JD”:G“A0”:G<0⇒Q=1△G>0⇒Q=-1△F=AbsG:Prog“S3”:G=F:R“R”:O“Gra0(ZY-JD)”:F=O:Prog“S3”:F=F:H“L-ZY”:S=R÷COS(G÷2):M“X(YXIAN)”=A+Scos(F+180°+Q×(90°-G÷2))◢N“Y(YIAN)”=B+Ssin(F+180°+Q×(90°-G÷2))◢L=2πR÷360°×G:F=F- Q×90°+180°:F<0⇒F=F+360°△F>360°⇒F=F-360°:≠⇒F=F△Lbl1:{CD}:C“X”:D“Y”:POL(M-C,N-D):T=J:T=Ans+180°:P=I:U=T-F:-Q×U≦0⇒Prog“T”:Goto1△-Q×U>0⇒Prog“U”:Goto1△ (主程序完)子程序:1、VPol(A—C,B—D):T=J:T=Ans+180°:P=I:U=T-(F+90°Q):E“LI”=H+Rtan(G ÷2)-PcosU◢K“B”=-Psin(u)◢2、WPol(A—C,B—D):T=J:T=Ans+180°:P=I:U=T-(F-GQ-90°Q):E“LI”=H+L+(PcosU-Rtan(G÷2))◢K“B”=Psin(u)◢3、TAbs U≤180°⇒Prog“V”△A bs U>180°⇒U=T+360°-F:U>G⇒Prog“W”:≠⇒Prog“X”△4、UAbsU>180°⇒Prog“V”:≠⇒AbsU≤G⇒Prog“X”⊿AbsU>G⇒Prog“W”⊿5、XE“LI”=H-Q(2πR÷360°×U)◢K“B”=Q(P-R)◢说明:一、本程序用于计算直线与圆曲线组合的线路上由点坐标计算相应桩号及其从中桩左、右偏移量。
全站仪对边测量原理及应用

1前言随着现代测绘新技术发展,全站仪在工程建设中已广泛使用。
尤其是配备有测绘软件的电脑型全站仪,具有能同时解决工程外业测量数据的采集与内业数据处理及计算的功能,使现代工程测量从从前繁重的内外业工作中解放出来,大大地提高测绘工作的质量与效率。
下面就一般全站仪通用的对边测量功能,阐述其在道路测量中的具体运用方法其注意事项,以供工程测量人员参考。
2对边测量原理对边测量功能指:全站仪利用其三维坐标测量原理实时计算两点间的平距、垂距与斜距以及两点间的相关几何参数。
有射线对边(A-B,A-C)和折线对边(A-B,B-C)两种对边测量方式可供用户选择。
其原理图1所示。
根据实时测得相互两点间的坐标经反算和高差计算结果,一般比较好的全站仪屏幕可显示以下相关两点间的几何参数:rSD:两点间的斜距;rHD:两点间的平距;rVD:两点间的高差;rV%:两点间坡度百分比;rGD:垂直坡度;rAZ:从第1点到第2点的方位角。
特别应注意的是架仪点位置的区分,一般情况下采用任意点设站测量,那么仪器中心坐标为仪器上次建站保存的坐标数据,方向为任意方位,因为仪器只显示计算结果,坐标只是其测量过程对结果没影响。
若采用已知点建站测量那么方位角为真实的方位角值,其它显示数值没影响。
下图2示:可见若B、C镜标高度相等,那么屏幕显示即是地面点的实际数据,若采用免棱镜功能则同上或应直接观测地面点。
3 对边测量高差的精度分析全站仪对边测量如图3所示。
测量时一般使镜站镜高相等。
即其高差观测精度由下列计算:式中,——测点A的单向高差误差;——测点B的单向高差误差;若站镜视距、且镜站外界条件相同时,则有≈,则对边高差测量误差→0。
由此可见,利用全站仪对边高程测量功能在镜站视距相等和外界条件相同的条件下可获得较高的精度。
一般情况下各相邻测点的视距差不应相差较大,以不大于150m,视距不大于1000m为宜。
4对边测量平距的精度分析全站仪对距离测量的标称精度一般为,在道路导线测量中测点至架仪点的距离一般不会太远,大于2km的范围是很少见的,全站仪距离测量的观测误差完全满足道路各级测量的精度要求。
由坐标反算出路线里程桩号在工程测量中的应用

由坐标反算出路线里程桩号在工程测量中的应用摘要:文章系统地介绍了由已知坐标,反向推算出该坐标位于公路路线的里程桩号及距中距离的基本概念和方法,重点介绍利用卡西欧fx-4800计算器编程,由已知坐标反向推算出公路路线中常见的直线段、圆曲线段的里程桩号方法及其在工程测量中的应用,对缩短工程测量时间,提高测量效率起到重要作用。
关键词:坐标反向推算;公路路线里程;编程;工程测量;引言在公路施工测量中,我们常用的测设方法是通过设计文件、图纸中的直线、曲线及转角表,来计算出路线的中桩、边桩坐标,再利用全站仪的放样功能,将中桩及边桩坐标在实地位置测定出来。
那么我们能不能由某一已知坐标,通过卡西欧fx-4800计算器编程计算,就能知道该坐标的准确的路线里程桩号以及其距中线的距离,甚至其设计高程,这对我们提高施工测量的效率有很大的帮助。
本文将阐述由已知坐标反向推算出公路路线中较为常见的直线段、圆曲线段里程桩号的基本概念和方法,以及介绍利用卡西欧fx-4800计算器编程,快速反算出已知坐标的里程桩号及距中距离。
1 直线段坐标反向推算路线里程桩号如图1,设直线段路线起始点O的里程桩号为K1,中桩平面坐标为(X0,Y0),路线方位角为α,P点平面坐标为(X,Y),求出P点位于该直线段的里程桩号,以及距中距离,计算步骤为:①计算直线起点O至P点的直线距离,计算公式为:②反算直线起点O至P点的坐标方位角,计算公式为:③计算直线0P与路线的夹角,计算公式为:④计算P点垂直投影于路线的垂直距离,即P点到路线中心的距离,计算公式为⑤计算P点的里程桩号,计算公式为:图1从图1中,可以看出P点的里程桩号由P点垂直投影于路线的P1点与直线起始点O之间的直线距离,与O点里程K0+000相加后,即为P点的里程桩号,L=Dsinβ即为P点位于路线右侧的距中距离,数值为正值;如果P点位于路线左侧,L=Dsinβ数值为负值。
例1:一直线段,起始桩号为K176+600,计算方位角α=299°06′58″,起点的平面坐标为X=94342.979m,Y=10235.344m,P点平面坐标为X=94387.488m,Y=10145.669m,试计算P点位于该路线的里程桩号及距中距离。
高速铁路线路内任意点计算中桩里程及偏距算法优化

高速铁路线路内任意点计算中桩里程及偏距算法优化张攀华;冯开利【摘要】在常规数学模型的基础上,提出了任意点与线路关系新的计算方法,并对现有的曲线计算数学模型进行了优化,可快速计算地面上任意点在线路中的里程及偏距.【期刊名称】《铁道建筑技术》【年(卷),期】2014(000)003【总页数】4页(P118-121)【关键词】高速铁路;任意点;中桩里程;反算优化【作者】张攀华;冯开利【作者单位】中铁二十二局集团第三工程有限公司福建厦门361000;中铁二十二局集团第三工程有限公司福建厦门361000【正文语种】中文【中图分类】U212.31 引言施工放样贯穿于高铁建设的整个过程,实际的施工放样通常是根据设计图纸里程,求解出该里程对应的中桩坐标,以及法线偏距的边桩坐标。
往往在实际施工中经常会遇到与其相反的情况,即由中线外某点坐标反算出该点对应的中桩里程,以及法线上的偏距。
如隧道断面检测,路基堑坡开挖放样等,就需要在得到目标点坐标后快速的获取对应的里程、偏距;又如在施工结束后,对路基、结构物的复测中,通过对结构物实测,需要快速算出施工与设计的偏差。
坐标反算首先就要确定目标点所在线元,在过去通常需要大家输入一个估算的中桩里程,然后直接采用迭代的方法解决反算问题。
假如输入估算里程与实际中桩里程偏差太大,就可能造成无法反算,一旦出现这种情况,大多程序就会从线路的第一线元开始计算,至计算到线路的最后一个线元;反算的过程就是进行若干次迭代计算,满足精度后,就认为已经求解出对应的中桩近似里程。
线路越长迭代计算的时间就越长,这种计算方法明显的效率不足。
根据现场测量实践经验,总结出一种简单快捷的计算方法,可快速判断出目标点是否在线路中及所在的线元,并对常规反算数学模型进行了优化,从而大大提高计算速度与作业效率。
2 算法与公式推导2.1 要素与代码说明所使用的曲线要素名称有:线路起点QD、线路切线交点 JD、线路终点 ZD,线元起点 A,线元终点B。
GPS测量应用技术在道路工程测量中的应用

浅谈GPS测量应用技术在道路工程测量中的应用摘要:在当代科技快速发展的现代化社会,城市道路工程建设的发展自然也离不开高新科技技术的应用。
道路工程测量作为道路工程建设的关键部分,其测量信息的精确程度将直接关系到整体工程的质量安全,而gps测量技术具有高精度、全天候等优点,势必会在道路工程测量中得到良好的应用。
因此,本文从gps测量技术的原理及有关方法着手,分析和介绍了gps测量技术在道路工程测量中的相关应用。
关键词:gps测量应用技术道路工程于上个世纪七十年代由美国建立gps(global positioning system)全球卫星定位系统,是一种将卫星与通讯发展相结合起来的测量技术。
近年来,gps测量技术凭借其全球性、全能性、全天候的导航定位、定时及测速优势,得到了众多领域发展建设的青睐,而且随着gps系统的不断完善,其相关测量应用技术的发展前景非常乐观。
一、gps测量技术的原理及方法1 gps测量技术的原理gps测量技术的基本原理是以测量中的距离交会定点原理为相关依据的,通过空间分布的卫星及其与地面测量点之间距离的相互交会,从而获取地面测量点的三维坐标位置。
由于gps系统由空间、地面控制和相关用户三大部分组成。
其中,空间部分为gps卫星,地面控制部分为地面监控系统,用户设部分则为gps信号接收机。
因此,对gps测量技术工作原理的理解可以简化分为绝对定位和相对定位两种。
1)绝对定位原理:视gps卫星为已知点,在待测点设置gps接收机,在某一时刻同时接收到3颗或3颗以上的卫星所发出信号时,对其所测得数据进行处理和计算,从而求得该时刻接收机测站点到卫星距离,并根据卫星星历查到该时刻3颗卫星三维坐标,再由相关公式求得待测点三维坐标。
再加上,gps系统能保证地球上任意一点在任意时刻都可以同时观测到4颗卫星,为gps卫星对相关观测点的经纬度及高度的采集提供了保证,从而实现了gps测量技术的导航、定位、授时等相关功能。
测量坐标反算原理复核构造物尺寸、横坡的计算方法
measurement stakeout accuracy requirements.
关键词院公路工程;涵洞;通道桥;切线方位角;里程;偏距;设计高程;坐标反算原理;测量放样
Key words: highway engineering;culvert;channel bridge;tangent azimuth;mileage;offset;design elevation;coordinate back calculation
coordinate calculation and coordinate calculation based on the coordinates of the middle stake and the tangent azimuth. It is difficult to
check for oblique structures. This paper uses the principle of coordinate inverse calculation to reverse calculate and review, find the
Calculation of Survey Coordinates
杨新志 YANG Xin-zhi
(中铁大桥局集团第一工程有限公司测绘分公司,郑州 450053) (Surveying and Mapping Branch of the First Engineering Co.,Ltd.,MEBC,Zhengzhou 450053,China)
出相交点的里程、偏距和设计高程,再来三算构造物的长度和横坡,该方法易于理解,计算准确,满足现场施工测量放样的精度要求。
Abstract: In the construction of highway engineering, in order to allow the highway to smoothly pass the existing lines and water
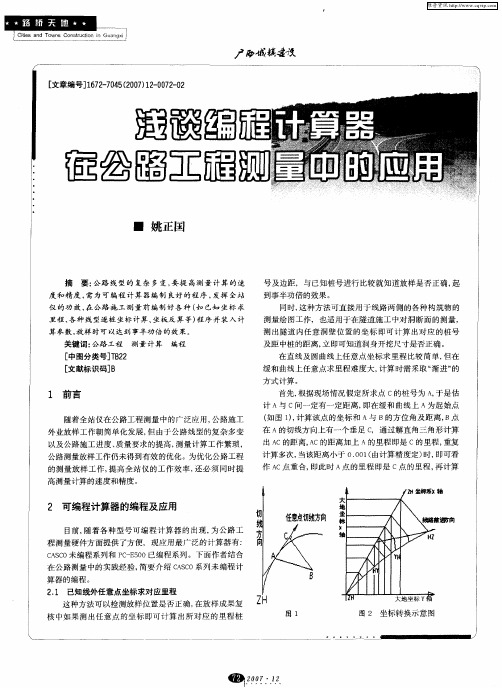
浅谈编程计算器在公路工程测量中的应用
数据库 :12 3 ( ( 、、 …) 每一组 曲线 占用一个子程序)
1
:
K =
: F=
:= R
:= J
: M=
: = Z
: Q=
:
算器 的计 算过程, 程序 同时也包 含 了已知坐标求 里程 的 该 部分子程序 , 以线路 曲线元 素起 讫点为 单元 , 据要 计算 根 的桩 号 自动判断,通过共 用程序 即可计 算任 意桩 号 的中 、
维普资讯
广 槭 辘建设
[ 文章编号]6274 (07 1—020 17-0520)207— 2
髓鼷鲺 奄 固嚣固
■ 姚正国
摘
要: 公路 线型 的 复杂 多 变, 要提 高测 量计 算 的速
号及边 距,与已知桩号进行 比较就知道 放样是否 正确, 起
以及公路施 工进 度 、 量要 求的提高, 质 测量计算 工作繁琐 ,
公路测量放 样工作仍未得 到有效的优化 。为优化公路工程 的测量放 样工作 , 高全站 仪的工 作效率 , 必须 同时提 提 还
高测量 计算 的速度 和精度 。
可编程计算器 的编程及应用
目前, 随着各 种型号 可编程 计算器 的出现, 公路 工 为
计 A与 C间一定有一定距 离, 即在缓和 曲线上 A为起 始点 ( 如图 1, ) 计算该点 的坐 标和 A与 B的方位 角及距离 , B点
关键词 : 公路工程
测量计算
编程
[ 中图分类号]B2 T2 [ 文献标 识码] B
1 前言
随着全站仪在公 路工程测量 中的广泛应用 , 公路施 工 外业放样工作朝 简单化发展 , 由于公路 线型的复杂 多变 但
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由坐标反算出路线里程桩号在工程测量中的应用
摘要:文章系统地介绍了由已知坐标,反向推算出该坐标位于公路路线的里程桩号及距中距离的基本概念和方法,重点介绍利用卡西欧fx-4800计算器编程,由已知坐标反向推算出公路路线中常见的直线段、圆曲线段的里程桩号方法及其在工程测量中的应用,对缩短工程测量时间,提高测量效率起到重要作用。
关键词:坐标反向推算;公路路线里程;编程;工程测量;
引言
在公路施工测量中,我们常用的测设方法是通过设计文件、图纸中的直线、曲线及转角表,来计算出路线的中桩、边桩坐标,再利用全站仪的放样功能,将中桩及边桩坐标在实地位置测定出来。
那么我们能不能由某一已知坐标,通过卡西欧fx-4800计算器编程计算,就能知道该坐标的准确的路线里程桩号以及其距中线的距离,甚至其设计高程,这对我们提高施工测量的效率有很大的帮助。
本文将阐述由已知坐标反向推算出公路路线中较为常见的直线段、圆曲线段里程桩号的基本概念和方法,以及介绍利用卡西欧fx-4800计算器编程,快速反算出已知坐标的里程桩号及距中距离。
1 直线段坐标反向推算路线里程桩号
如图1,设直线段路线起始点O的里程桩号为K1,中桩平面坐标为(X0,Y0),路线方位角为α,P点平面坐标为(X,Y),求出P点位于该直线段的里程桩号,以及距中距离,计算步骤为:
①计算直线起点O至P点的直线距离,计算公式为:
②反算直线起点O至P点的坐标方位角,计算公式为:
③计算直线0P与路线的夹角,计算公式为:
④计算P点垂直投影于路线的垂直距离,即P点到路线中心的距离,计算公式为
⑤计算P点的里程桩号,计算公式为:
图1
从图1中,可以看出P点的里程桩号由P点垂直投影于路线的P1点与直线起始点O之间的直线距离,与O点里程K0+000相加后,即为P点的里程桩号,L=Dsinβ即为P点位于路线右侧的距中距离,数值为正值;如果P点位于路线左侧,L=Dsinβ数值为负值。
例1:一直线段,起始桩号为K176+600,计算方位角α=299°06′58″,起点的平面坐标为X=94342.979m,Y=10235.344m,P点平面坐标为X=94387.488m,Y=10145.669m,试计算P点位于该路线的里程桩号及距中距离。
计算结果如下: 计算直线起点O至P点的直线距离
反算直线起点O至P点的坐标方位角,
计算直线0P与路线的夹角,
计算P点到路线中心的距离,
计算P点的里程桩号,
计算结果为P点位于该路线里程K176+700处,距中线距离为左侧4.75m
处。
将此计算过程编写成卡西欧fx-4800计算器的应用程序,程序清单如下:程序名:ZXFS
程序说明:先输入P点坐标X=94387.488,Y=10145.669,然后按EXE 键运行程序,程序显示L=-4.75,K=176700,按EXE键继续运行程序。
2 圆曲线段坐标反向推算路线里程桩号
圆曲线段坐标反向推算路线里程桩号的计算方法,其实就是圆曲线测设方法中偏角法的逆向计算。
如图2,设P点平面坐标为(X,Y),位于圆曲线内任意区域里面,ZY点平面坐标为(X1,Y1),圆心O点平面坐标为(X0,Y0),圆半径为R,起始切线T方位角为α。
计算步骤如下:
①计算圆心O至P点的坐标方位角,计算公式:
②根据圆心O至P点的坐标方位角αOP,计算出OP延长线与圆曲线相交的P1点的平面坐标(X1,Y1),计算公式:
③ZY点至P1点的坐标方位角αZY-P1 =arctg((Y-Y0)÷(X-X0)),与切线T 的方位角α相减,公式为
△即为曲线起点ZY至圆曲线上P1点的弦线与切线T之间的弦切角,根据几何原理,弦切角等于相应弧度所对的圆心角之半,即公式为:
④根据圆心角θ计算出P1点至ZY点相应的弧长,公式为:
从图2中可以看出P点位于P1点横断面方向上,它们的里程桩号是相同的。
⑤计算P1至P的直线距离,这个距离是P点距路线中心线的距离,这里需要说明的是,如果路线转角为左转角时,公式为:
如果路线转角为右转角时,公式为:
DP1-P的符号为正值时,表示P点位于路中心线右侧,DP1-P的符号为负值时,表示P点位于路中心线左侧。
图2
例 2 某段圆曲线,ZY点桩号为K176+983.178,ZY点平面坐标为X=94529.433m,Y=9900.576m,起始切线T方位角为α=299°06′58″,左转角α=21°15′23″,圆心o点平面坐标为X=89899.166m,Y=7321.694m,半径R=5300m,P点平面坐标为X=94801.954m,Y=9347.293m,试计算P点位于该路线的里程桩号及距中距离。
计算过程如下:
计算圆心O至P点的坐标方位角,
计算出OP延长线与圆曲线相交的P1点的平面坐标(X1,Y1)
计算出ZY点至P1点的坐标方位角
④计算P1点至ZY点的弧长相应的圆心角θ,ZY点至P1点的弦线与切线T之间的弦切角为△=|295°46′55.3″-299°06′58″|=3°20′03″,圆心角为θ=2×3°20′2.7″=6°40′5.43″.
⑤计算P1点至ZY点的弧长:LP1=2×5300π×6°40′5.43″÷360°
= 616.822
⑥计算P1点的里程桩号:
KP1=(K176+983.178)+616.822=K177+600
⑦计算P1点至P点的直线距离:
DP1-P=((9347.293-7321.694)2+(94801.954-89899.166)2)1/2 -5300 = 4.75
计算结果为P点的里程桩号为K177+600,位于路线中心线右侧4.75m 处。
在工程测量中,特别是在路线横断面测量和隧道施工测量中,运用坐标反算程序反算路线里程桩号,我们能快速、准确地完成路线横断面测量以及隧道洞身净空检测工作,现以例2为例,介绍利用坐标反算路线里程桩号原理,检测洞身截面为圆形的隧道净空尺寸是否满足设计要求,某一隧道位于例2所示的圆曲线上,隧道起始桩号为K177+600,如图3所示,隧道中心线位于路中线右侧3.75m 处,隧道洞身断面圆心比路线设计标高线高1.25m,隧道净空半径R=5.85m,隧道竖曲线为凸曲线,竖曲线参数为:变坡点桩号为K177+600,变坡点高程为807.735m,凸半径为50000m,切线长350m,前纵坡为2.5%,后纵坡为1.1%,现利用圆曲线段坐标反向推算路线里程桩号计算原理,将此隧道洞身净空检测计算过程编写成卡西欧fx-4800计算器的应用程序,程序清单如下:
程序说明:C、D在程序中表示ZY点的坐标,M、N在程序中表示圆曲线O点的坐标,I在程序中表示竖曲线的坡度,R表示隧道净空的检测半径。
先输入P点坐标X=94801.954,Y=9347.293,然后按EXE键运行程序,程序显示K=177600,L=4.75,H=807.760然后再输入P点的高程Z=813.524,按EXE键继续运行程序,这时程序显示R=5.85,这说明P点的隧道洞身净空尺寸符合设计要求。
图3
3 结语
坐标反算路线里程桩号的测量方法,确实能够快速准确地完成路线横断面的测量工作,在路基实地放样中也能快速得确定挖方路基边坡开挖线、填方路基填方界线,以及在隧道施工测量方面,也能快速准确检测隧道净空尺寸是否符
合设计要求。
注:文章内所有公式及图表请用PDF形式查看。