步进电机选型样本(最新版)
Leetro步进电机及驱动器选型样本

接线图(Wiring diagram)
黑 A+ M
绿 A-
B+
B-
红
蓝
4
矩频特性曲线图(Frequency-torque Characteristics)
Torque [g.cm]
DM2832E VM:24VDC;1.0Apeak/Phase() Driver:DMD402A,400pulse/rev
转动惯量
Rotor Inertia (g·cm2)
6.5
1.7
0.0182.05.4来自1.50.03
3.6
重量 Weight
(Kg)
0.06
0.08
机身长度 Shaft Length (mm)
33
42
适配驱动器
DMD202A/B DMD402A DMD202A/B DMD402A
外型尺寸(Mechanical Dimensions)(单位mm)
接线图(Wiring diagram)
黑 A+ M
绿 A-
B+
B-
红
蓝
2
矩频特性曲线图(Frequency-torque Characteristics)
Torque [g.cm]
DM2033E VM:24VDC;1.0Apeak/Phase() Driver:DMD402A,400pulse/rev
型号 Model
额定电压 Rated Voltage (V)
DM2033E
3.9
DM2042E
4.32
电流/相 Current /
Phase (A)
0.6
0.8
电阻/相 Resistance/
步进电机、驱动器命名及选型
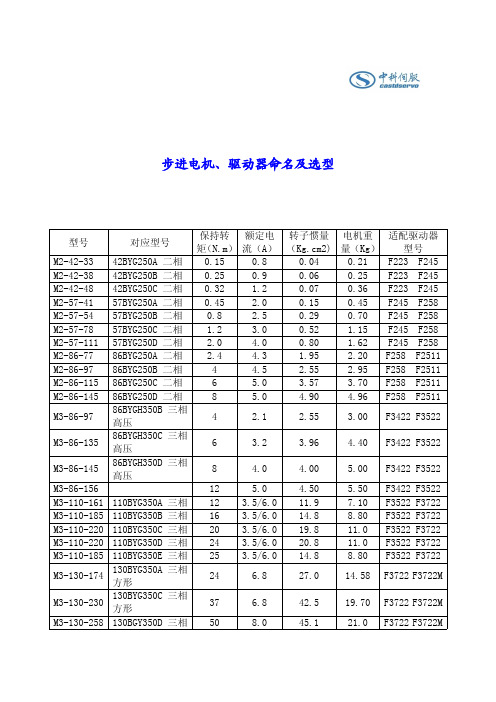
步进电机、驱动器命名及选型
型号
M2-42-33 M2-42-38 M2-42-48 M2-57-41 M2-57-54 M2-57-78 M2-57-111 M2-86-77 M2-86-97 M2-86-115 M2-86-145
M3-86-97
M3-86-135
F3722 F3722M
19.70 F3722 F3722M 21.0 F3722 F3722M
方形 M3-150-255 150BYG350C 三相 60
8.5
100.0
29.6 F3722 F3922
M2- 42- 33 1 23
F 3 5 22 123 4
Байду номын сангаас
1、M 代表步进电机,2 代表两相,3 代表三 相 2、机座外型 42mm 3、电机长度 33mm
1.2
0.45
2.0
0.8
2.5
1.2
3.0
2.0
4.0
2.4
4.3
4
4.5
6
5.0
8
5.0
4
2.1
6
3.2
8
4.0
12
5.0
12 3.5/6.0
16 3.5/6.0
20 3.5/6.0
24 3.5/6.0
25 3.5/6.0
24
6.8
37
6.8
50
8.0
转子惯量 (Kg.cm2)
0.04 0.06 0.07 0.15 0.29 0.52 0.80 1.95 2.55 3.57 4.90
110BYG350A 三相 110BYG350B 三相 110BYG350C 三相 110BYG350D 三相 110BYG350E 三相 130BYG350A 三相 方形 130BYG350C 三相 方形 130BGY350D 三相
步进电机型号、参数、选择最新版本
则摩擦力:f = 0.1 10 9.8 = 9.8 N
惯性力: F1 = M a = 10 2.11 = 21.1 N 故:同步带上要有拉力 F = F1+ f .= 21.1+9.8= 30.9 N
3. 选择同步带直径Φ和步进电机细分数m
设同步带直径Φ=30 mm
H桥恒频斩波恒相流驱动电路原理框图 . 电流PWM细分驱动电路示意图
2. 单极性驱动
单极性驱动原理图
3. 双极性驱动
.
双极性驱动原理图
4. 微步驱动
微步驱动技术是一种电流波形控制技术。其基本思想是控制每相绕 组电流的波形,使其阶梯上升或下降,即在0和最大值之间给出多 个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中 间状态,对应于电机转子旋转的步数增多、步距角减小。采用细分 驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避 免低频共振及降低运行噪声
周长为C=3.14 Φ = 3.14 30 = 94.2 mm
核算定位精度:脉冲当量δ = C / (200 m) < 0.05;
m > C / (200 0.05)= 94.2 / (200 0.05) = 9.42
核算最大转速:nmax = Vmax/ C = 0.211 / (94.2/1000) =2.24 r/s 显然,细分数太大,最大转速太低。 但是,同步带直径也不可能小2倍,所以只能增加一级减速
步进电机及驱动器知识讲座
.
主要内容
一、步进电动机简介 二、驱动器简介 三、电机选型计算方法 四、计算例题 五、雷赛公司步进驱动器的命名方法 六、雷赛公司驱动器产品线介绍 七、电机接线 八、评判步进系统好坏的依据 九、使用过程中常见问题及原因分析 十、步进驱动系统的常见问题 (FAQ) 十一、步进电动机与交流伺服电动机的性能比较 十二、驱动器产品测试对比
步进电机选型表

90、110、130 系列 90、110、130 系列 90、110、130BYG系列 90、110、130BYG系列 110、130BYG系列 110、130BYG系列
适配电流 7.0A 以下的电机 控制方式(共阳接法):OPTO 适配电流 8.0A 以下的电机 控制方式: CP+ CP- DIR+ 适配电流 8.0A 以下的电机 控制方式(共阳接法):OPTO 适配电流 8.0A 以下的电机 控制方式(共阳接法):OPTO 适配电流 8.0A 以下的电机 控制方式: CP+ CP- DIR+ 适配电流 8.0A 以下的电机 控制方式(共阳接法):+5V
CP DIRCP CP DIR-
DIR EN+ DIR DIR EN+
FREE ENFREE FREE EN-
CP
M
R
三相混合式驱动器
1 ☆SJ-3H090M ☆SJ-3H110MA 2 SJ-3H110MB ☆SJ-3H130MA 3 SJ-3H130MB ☆SJ-3H80MA 4 SJ-3H80MB 3 10.0 AC220V 3 8.0 3 6.8 3 5.0 AC40-60V 细分数看说明 书 细分数看说明 书 细分数看说明 书 细分数看说明 书 57、85、86、90 系列 适配电流 5.0A 以下的电机 控制方式:CP+ CP- DIR+ EN适配电流 7.0A 以下的电机 控制方式:CP+ CP- DIR+ EN适配电流 8.0A 以下的电机 控制方式:CP+ CP- DIR+ EN110、130 系列 适配电流 10.0A 以下的电机 控制方式:CP+ CP- DIR+ ENDIREN+ DIREN+
混合式步进电机系统产品选型一览表

相数 2 2 2 2 2 2
步距角 ( º) 1.8 1.8 1.8 1.8 1.8 1.8
静态相电流 (A) 2.4 2.4 6.0 6 5.5 6
保持转矩 (N•m) 1.1 1.8 2.8 3.6 4.6 8
转动惯量 (g•cm2) 280 440 800 1000 1400 2700
外形尺寸 (mm) 56×56×88 56×56×108 56×56×144 85×85×84 85×85×97 85×85×136
序 号 37 38 39 40 41 42 43 44 45 46
五相混合式步进电机
规 格 型 号 90BYG550A-0301 90BYG550B-0301 90BYG550C-0301 90BYG5200B-0301 90BYG5200D-0301 110BYG550B-0301 110BYG550C-0302 110BYG550D-0302 110BYG5200B-0301 110BYG5200C-0301 相 数 5 5 5 5 5 5 5 5 5 5 步距角 ( º) 0.72 0.72 0.72 0.18 0.18 0.72 0.72 0.72 0.18 0.18 静态相电 流 (A) 3 3 3 3 3 3 3 3 3 3 保持转矩 (N•m) 2 4 6 5 10 8 14 18 10 14 转动惯量 (g•cm2) 2300 4500 8000 4500 9000 9700 14600 19500 10000 15000 外形尺寸 (mm) 92×92×75 92×92×106 92×92×137 92×92×106 92×92×168 112×112×165 112×112×205 112×112×245 112×112×157 112×112×195
步进电机选型
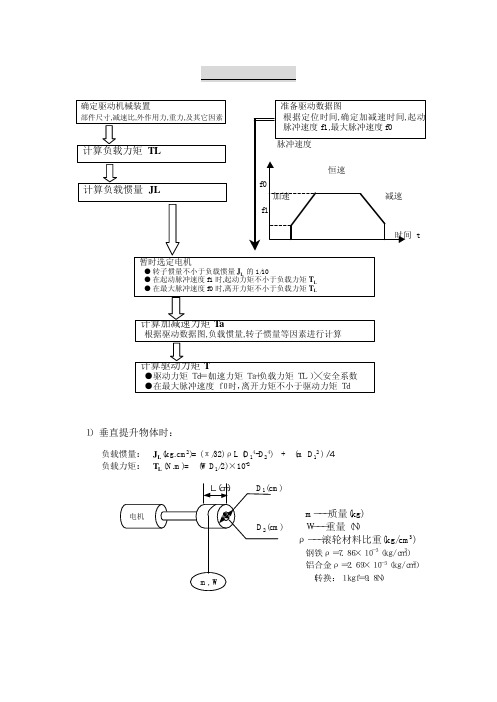
4)驱动力矩 T =Ta+TL= (JM+JL)(π/180)θS[(f0-f1)/t]×10-2 + TL
T(Nm)
运转曲线
T --驱动力矩
Ta--加速力矩
T B
JM--电机转子惯量
启动曲线
JL--负载惯量
TL A
f1 f0
注意: 选型时还要看 1/启动点 A 是否在启动矩频曲线以下,2/工作点 B 是否在运转矩频
曲线以下. 如果能同时满足以上两点,该电机可用.
2 相步进电机激磁顺序表
整步驱动方式
2 相激磁
1
A
激磁相
B
A
B
激磁相数
2
半步驱动方式
1-2 相激磁
A
激磁相
B
A
B
激磁相数
12 21
激磁顺序
2
3
2 34
2 激磁顺序 56
21 21
4 2 78 21
5 2 9 10 21
5 相步进电机驱动激磁顺序表
整步驱动方式
激磁顺序
5 相激磁
1 2 3 4 5 6 7 8 9 10
A
B
C
激磁相
DE激磁相数5555 55 5555
L(cm)
D1(cm)
电机
m---质量(kg)
D2(cm)
W---重量(N)
ρ---滚轮材料比重(kg/cm3)
钢铁ρ=7.86×10-3(kg/cm3)
铝合金ρ=2.69×10-3(kg/cm3)
m, W
(转换: 1kgf=9.8N)
2)水平移动物体时:
负载惯量: JL(kg.cm2)= J1+ (Z1/Z2)2 {J2+J3+m (P/2π)2} 负载力矩 : TL (N.m)= (Z1/Z2) {[μ(W+f) P]/(2πη)}×10-2
步进电机选型手册
长度 (mm)
115
150
转动 (g.cm^2)
5500 11000
重量 (Kg)
5 8.4
电机轴径均为 19mm,键槽尺寸为 6*35mm 接线图:
北京飞凌东泰电子技术有限公司
010-69732383
130 圆形步进电机系列
技术数据:
步距角
型号
(°)
静力矩 (N.m)
电流 (A)
电阻 (Ω)
电感 (mH)
1
FL57BYG3A76
1.47
5
0.87
1.9
注: 1. 电机可根据客户要求调整绕组参数和机械安装尺寸
长度 (mm)
50 56 76
重量 (Kg)
0.6 0.8
1
外形图:
接线图:
北京飞凌东泰电子技术有限公司
60 三相混合式步进电机
技术数据:
010-69732383
电机型号
FL60BYG3A54 FL60BYG3A76 外形图:
6
62
640
1.6
FL86BYG92
1.8 3.9 3.3 1.1
10
4
92
1300
2.6
FL86BYG94
1.8 4.4
3
1.2 11
4
9库存,可根据客户要求订制.
外形图:
接线图:
北京飞凌东泰电子技术有限公司
矩频曲线图:
010-69732383
北京飞凌东泰电子技术有限公司
4
0.8
6.6
FL86BYG80
(串联) 4.5
3
1.6
14
(并联) 4.5
6
雷赛步进电机选型参考
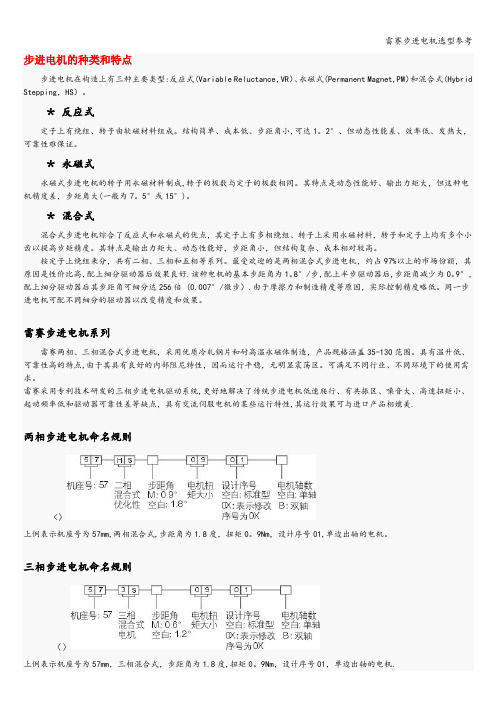
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
*反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1。
2°、但动态性能差、效率低、发热大,可靠性难保证。
*永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7。
5°或15°)。
*混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好.该种电机的基本步距角为1。
8°/步,配上半步驱动器后,步距角减少为0。
9°,配上细分驱动器后其步距角可细分达256倍 (0.007°/微步).由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。
具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。
可满足不同行业、不同环境下的使用需求。
雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美.两相步进电机命名规则<〉上例表示机座号为57mm,两相混合式,步距角为1.8度,扭矩0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用两相四线(1.8°)电机快速选型表:
电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○7
1.UIROBOT优爱宝步进马达
2.两相四线马达
3.马达的端面尺寸型号如:20/28/35/42/57/86/110
4.马达长度如:39/47/56
5.相电流XX代表相电流为X.X A/相
6.04代表引线数为4,06代表引线数为6
7.输出轴型式A:单出轴B:双出轴
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
技术规格Technique Specificatio
机械尺寸Dimensions绕线图Wiring Diagram
技术参数Technique parameter
Specificatio
技术规格Technique
机械尺寸Dimensions。