感应电动机转子磁场定向下的弱磁控制算法
感应电机弱磁控制技术研究
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权 保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。 本人授权华中科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检 索,可以采用影印、缩印或扫描等幅值手段保存和汇编本学位论文。 保密□,在 年解密后适用本授权书。 本论文属于 不保密□。 (请在以上方框内打“ v” ) 学位论文作者签名: 日期: 年 月 日 指导教师签名: 日期: 年 月 日
1.2 交流电机调速技术概述
交流电机是一个多变量、非线性的被控对象[ i~ii]。根据电机驱动对象的不同,所 采 用的电机控制策略也不尽相同,对于像风机、水泵等对调速性能要求不高的这类负载 可采用恒 V/F 控制,该方法是从电机的稳态方程出发研究其控制特性,结果是其动态 控制效果特性较差。 20 世纪 70 年代初提出的用矢量变换[ iii]的方法研究电机的动态控制 过程,不但控制各变量的幅值,同时控制其相位,并利用状态重构和估计的现代控制 概念,巧妙的实现了交流电机磁通和转矩的重构和解耦控制,从而促进了交流电机控 制系统走向实用化。目前国外用变频电源供电的异步电机采用矢量控制技术已成功的 应用于轧机主传动、电力机车牵引和数控机床中。此外,为解决系统复杂性和控制精 度之间的矛盾,又提出了一些新的控制方法,如直接转矩控制、电压定向控制和定子 磁场定向控制等。随着控制芯片的计算能力的不断提高,现代控制理论中的各种控制 方法在电机控制中得到应用,如二次型性能指标的最优控制和双位模拟调节器控制, 可提高系统的动态性能,滑模变结构控制可增强系统的鲁棒性,状态观测器和卡尔曼 滤波观测器可以获得无法实测的状态信息,自适应控制则能全面提高系统的性能。 1.2.1 新型电力电子器件和 PWM 技术
感应电动机转子磁场定向下的弱磁控制算法

感应电动机转子磁场定向下的弱磁控制算法1概述电感应电动机转子磁场定向控制是一种利用电感应电动机转子磁场定向来实现自动控制的新型技术,它利用了转子运行时产生的偏磁场,通过反馈控制实现了广泛的自动化控制。
此外,磁场定向技术还具有优于传统数字控制方法的实时性和灵活性,适用于智能控制场景。
基于以上优点,近年来,磁场定向控制算法在微机控制行业中受到越来越广泛的关注,并得到广泛的实际应用。
2基本原理电感应电动机转子磁场定向控制技术是一种可以满足电动机自动保持特定磁场定向的自动控制算法,该算法用来检测当前转子运行状态并调整相应偏磁,从而控制转子磁场,使其保持设定的参考方向。
由于磁场定向技术的特殊性,其实现的过程是一种弱磁控制。
首先,对电动机实现弱磁控制,需从转子中使用高精度磁强计和电场模拟器以及磁鉴定系统来成功探测当前转子的磁场强度。
在控制环节,运用转子偏磁信号调整电机电磁联轴器,从而达到现有系统中偏磁矫正和转子磁场定向控制的目标。
3算法实现磁场定向控制算法的实现主要包括检测转子磁场定向状态、调整转子磁场定向和转子偏磁的三个步骤。
(1)通过相应传感器检测转子磁场定向状态:首先,通过高精度磁强计、电场模拟器和磁鉴定系统,检测转子当前位置及其在设定参考方向上的偏差角度。
(2)调整转子磁场定向:根据检测出来的转子磁场定向状态及其偏差角度,柔性调整相应偏磁,来实现转子磁场定向调整。
(3)调整转子偏磁:根据磁场定向算法的反馈信号和当前转子磁场定向状态,调整相应的转子偏磁,从而达到磁场定向控制的目的。
4结论电感应电动机转子磁场定向控制算法是一种有效的控制方法,它可以实现高精度的转子磁场定向控制,进而提高电动机的性能和可靠性。
该技术为智能化系统提供了有效、稳定、可靠的控制平台,同时也开拓了电动机转子磁控自由度更高的自控控制空间。
基于矢量控制的感应电机弱磁控制算法研究

基于矢量控制的感应电机弱磁控制算法研究陶华堂;李强【摘要】变频调速控制系统要求电机具有宽范围的恒功率弱磁调速能力,并能输出较大的转矩.提出一种感应电动机弱磁状态下励磁电流和转矩电流轨迹控制的新方法.在满足电机和驱动器最大电压和电流约束条件的前提下,对电机励磁电流轨迹和转矩电流轨迹分别独立控制,实现全速度范围内的最大转矩输出.设计了该弱磁控制算法的实现策略,并在7.5 kW感应电机上进行实验研究,与传统弱磁控制方法相比,提出的弱磁控制方法可以输出更大的转矩,电流波动小,系统更稳定.【期刊名称】《电气传动》【年(卷),期】2016(046)003【总页数】5页(P7-11)【关键词】感应电机;矢量控制;弱磁;最大转矩电流比控制【作者】陶华堂;李强【作者单位】中国卫星海上测控部,江苏江阴214400;中国卫星海上测控部,江苏江阴214400【正文语种】中文【中图分类】TM30感应电机具有转子结构坚固、可靠性高、成本低、转矩波动小和噪声小等优点。
基于矢量控制的感应电机变频调速系统被广泛应用于家用电器、电梯曳引、电动汽车、数控机床、船舶动力等领域。
采用电压源逆变器驱动电机时,由于受到逆变器最大输出电压和最大输出电流的限制,需要采用弱磁调速等方法使电机输出最大转速,且高速时仍能最大限度输出电磁转矩。
传统的弱磁控制方法是在基速以上,控制电机磁链和电机转速成反比[1-2],这种方法简单易实现,但是没有输出最大转矩电流比,即没有最大限度输出转矩;文献[3]提出了一种过调制算法,用来实现永磁同步电机的弱磁调速,但是该方法实现起来较困难;文献[4-11]提出的查表修正方法目前较为流行,主要是根据电机的转速通过查表修正电机励磁电流iM和转矩电流iT,此类方法简单易实现,应用也较为广泛,但是受电机本身参数影响较大;文献[12]提出了一种通过控制电机电压轨迹的方法实现电机弱磁调速控制,该方法不受电机参数影响,但前提是要获得电机励磁电流的大小。
弱磁控制
2016年6月12日星期日电机的弱磁控制原理异步电机变压变频调速的控制特性基频以下:恒转矩调速(恒磁通调速)电机启动电流大的原因:当感应电动机处在停止状态时,从电磁的角度看,就象变压器,接到电源去的定子绕组相当于变压器的一次线圈,成闭路的转子绕组相当于变压器被短路的二次线圈;定子绕组和转子绕组间无电的的联系,只有磁的联系,磁通经定子、气隙、转子铁芯成闭路。
当合闸瞬间,转子因惯性还未转起来,旋转磁场以最大的切割速度——同步转速切割转子绕组,使转子绕组感应起可能达到的最高的电势,因而,在转子导体中流过很大的电流,这个电流产生抵消定子磁场的磁能,就象变压器二次磁通要抵消一次磁通的作用一样。
而定子方面为了维护与该时电源电压相适应的原有磁通,遂自动增加电流。
因为此时转子的电流很大,故定子电流也增得很大,甚至高达额定电流的4~7倍,这就是启动电流大的缘由。
启动后电流为什么小?随着电动机转速增高,定子磁场切割转子导体的速度减小,转子导体中感应电势减小,转子导体中的电流也减小,于是定子电流中用来抵消转子电流所产生的磁通的影响的那部分电流也减小,所以定子电流就从大到小,直到正常。
随着启动电流增大,损耗增大,即定子端电压下降。
空载电流:不为0,一般是额定电流的1/3。
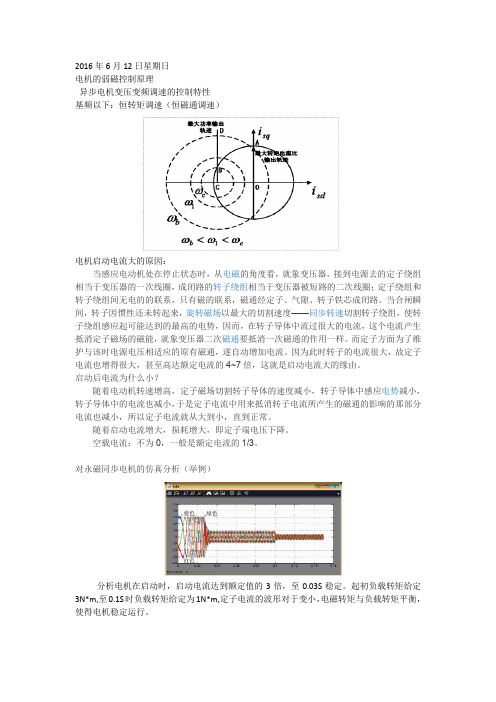
对永磁同步电机的仿真分析(举例)分析电机在启动时,启动电流达到额定值的3倍,至0.03S稳定。
起初负载转矩给定3N*m,至0.1S时负载转矩给定为1N*m,定子电流的波形对于变小,电磁转矩与负载转矩平衡,使得电机稳定运行。
转速刚启动瞬间为0,但大约经过0.02S后电机转速达到给定值,当0.1S时负载突然减小,转速有短暂的上升,立刻回到给定值,转速比较稳定,达到理想。
电机启动时,电磁转矩启动时较大,至0.03S后电磁转矩达到3N*m,0.1S时负载转矩发生变化,即电磁转矩也相应的发生变化。
电机空载运行时,空载电流的幅值大约是额定值的1/3,绝对不为0,平均值为0,相应的三相静止定子电流为120度,两相静止坐标互差90度,空载情况下,0.2S之前空载,其输出的两相静止坐标近似为0 ,但肯定不是0,由于采用id=0控制,即直轴电流一直是0,而转矩电流iq在控制是电流几乎为0,加负载后,值增加。
永磁同步电动机电枢电感及弱磁运行特性的分析计算
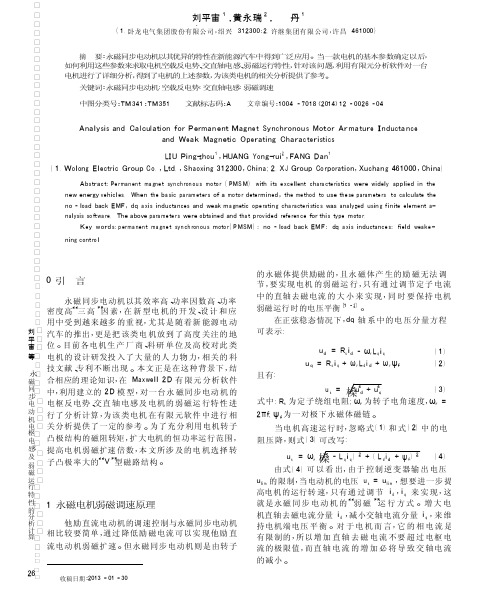
图 3 气隙磁密曲线
图 4 气隙磁密谐波分析
由于永磁同步电动 机的气 隙为正 弦 波,则 每极
下的基波气隙磁通:
Φ10
=
2 π B1 0 τ1 l ef
( 7)
计算得 Φ10 = 0 . 005 144 2 Wb,根据公 式 E0 =
机直轴去磁电流分量 i d ,减小交轴电流分量 i q ,来 维 持电机端电压 平 衡 。对 于 电 机 而 言,它 的 相 电 流 是 有限制的,所以增 加 直 轴 去 磁 电 流 不要 超 过 电枢 电 流的极限值,而直 轴 电 流 的 增 加 必 将导 致 交 轴电 流
的减小 。
26
收稿日期 :2013 - 01 - 30
D
2014 年第 42 卷第 12 期
e
signand
设 analy si s
计
分
析
由式( 4) 可以得到电机的机械角速度表达式:
B10 = 0 . 89 T,如图 4 所示。
Ω=
us
( 5)
槡 p ( - L q i q ) 2 + ( L d i d + ψ f ) 2
当电机的端电压和 电流均 达到最 大 值,且 电流
Key word s: p erma nen t ma gne t syn ch ron ou s moto r( P MSM) ; no - load back EMF; dq a xi s inductance s; field weake -
ning contro l
0引 言
的永磁体提供励磁 的,且永 磁体产 生的励 磁无法 调 节,要实现电机 的弱磁运 行,只有通 过调节定子 电流
磁场定向控制感应电动机的弱磁控制
= L 0 imR
( 5)
( 上接第 2 页 )
3结
语
高速无刷伺服电动机的 T 形 结构转子不仅 能 很好地解决磁钢固定问题, 更重要的是可以通过优 化磁钢和 T 形结构设计来削弱气隙谐波磁场; 与等 厚磁钢相比, 在 T 形结构中选用等径磁钢, 气 隙磁 密更接近正弦波 , 且磁钢加工成本相对较低, 因此具 有很好的应用前景。 参考文献
s
为定子角速度。
考虑到 L s 和 LR 可能发生 变化 , 而假定 L 0 保持 不变 , L s 变化曲线的确定将使得该结果足以推广到其他 电感参数。 在 Rs = 8 . 400 ! 、 R r= 2 . 985 ! 、 L 0 = 0. 115 1 H 条 件下 , 实测的转矩 - 转 速关 系曲 线和 效率 结果 ( 计 算 时包 括电 机 和逆变器 ) 如表 1 所示。
3结
语
[ 3]
本文结合插补运算的特点 , 提出了数控系统在 双轴联动的情况下, 既满足曲线转接的平滑过渡, 又 提高加工效率的控制方法。文中以数控系统变速运 动时, 实现光滑转接为例给出了转接控制部分的运 动控制算法。在此基础上, 可结合通用硬件插补器 进行推广, 并且具有软件插补无法比拟的优点。通 过扩展可推出三维的直线插补器以及曲线插补器。 参考文献
mR
为励磁磁 通 ; L 0 = LM (互感 ) ; imR 为励磁电流。 u2 s - R 2s i2 s
在空载条件下 , 利用下式可计算出 L s: Ls = 1
s
( 6)
式中 : u s 为定子电 压 ; is 为定子电流 ; R s 为定 子电阻 ; L s 为 定 子电感 ; L R 为转子电感 ;
反电动势
电动汽车感应电机的弱磁控制方法研究
III
重庆大学硕士学位论文
目
录
目
录
中文摘要 ..........................................................................................................................................I 英文摘要 ........................................................................................................................................ II 1 绪论 ............................................................................................................................................... 1
A Thesis Submitted to Chongqing University In Partial Fulfillment of the Requirement for the Degree of Master of Electricang Supervised by Liu He-pingProf. L Major: Electrical Engineering
电动汽车感应电机的弱磁控制方法研究
重庆大学硕士学位论文
学生姓名:陈琼良 指导教师:刘和平 专 业:电气工程
学科门类:工 学
重庆大学电气工程学院
二 O 一一年五月
弱磁控制方案

弱磁控制解决方案一d、q轴数学模型d-q轴系下表贴式同步电机电子方程为:式中: 和分别为直轴和交轴同步电感,为定子相电阻,为转子的电角速度,为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为,。
电动机定子电压大小为√,将上述等式带入得到√。
根据定子绕组电压公式,当电机定子电压达到逆变器输出的极限电压时,为了使得转速升高,只能通过增加去磁电流分量和减小交轴电流分量,以维持电压平衡,达到弱磁调速目的。
二安全限制问题在弱磁高性能调速时,不同工作区域内,由于控制规律不同,为了获得较好的控制效果,通常会选择不同的电流、电压矢量轨迹或者转矩矢量轨迹。
2.1 电压极限轨迹受逆变器输出电压的限制,电机运行稳定时,电压矢量幅值为:,又√,那么得到⁄。
其中为逆变器两端的最大限制电压,当d、q两轴的电感相等时,电压极限轨迹是一个圆形曲线;否则,电压极限轨迹是一个椭圆曲线。
2.2 电流极限轨迹受逆变器输出电流和电机本身额定电流的限制,PMSM稳定运行时,电流矢量幅值方程为:。
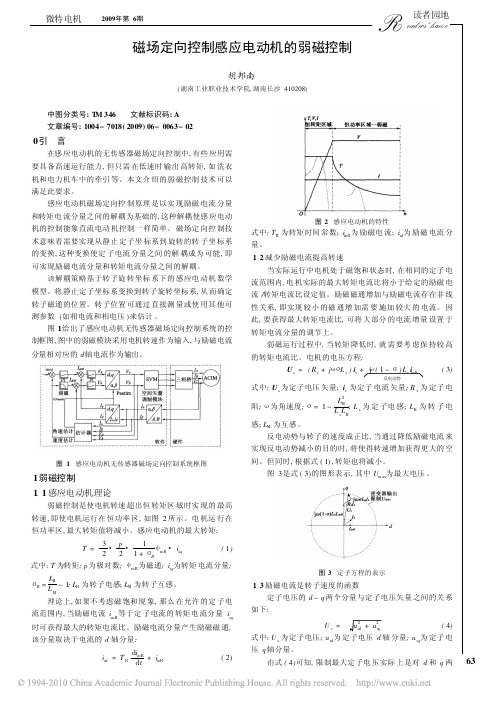
根据电流、电压极限方程得到轨迹图形为电动机稳定运行时,定子电流矢量既不能超过电压极限圆也不能超过电流极限圆。
如果1时,电流矢量的范围限制在ABCDEF中。
三弱磁控制3.1 弱磁控制方案一*主要控制流程:电机控制进入弱磁控制模式后,保持电流矢量大小不变,通过调节超前角β大小,调节d、q两轴电流、,通过反馈调节确定电压极限圆限制。
通过反馈结果确定超前角β变化趋势。
弱磁控制主要面临的问题1 进入弱磁控制状态,退出弱磁控制状态。
通常进入弱磁控制状态是电压或电流的调节达到了逆变器的饱和度。
以id=0的控制模式为例,调节q轴电流,确保定子两端电压值不超过Vmax。
当q轴电流达到设定的值,如果需要继续增加电机转速只能通过弱磁调节(保持电机硬件参数不变)。
首先保证电子两端电流大小i s不变,通过调节d、q两轴电流实现调节。
2 调节d、q两轴电流值调节d、q两轴电流过程中应该保证有效电流大小i s恒定,满足关系式为i s√i d i q。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阻全部忽略后,从定子端口看,电感量即为 L。漏 感要比互感小得多,一般取0.1。 若忽略定子电阻压降,稳态下由式(6)可得 usj 1(LisLm r/Lr)
Imax
Imax id
(7)
电流限制 椭圆 MTPA 线
假设 d 轴始终定向在转子磁链上, 由式(5)可得 ( r D1) rLm id
仿真和实验验证,实验结果证实了该方法的可行性。 关键词:感应电动机;弱磁;零电压矢量;最大转矩电流比 控制
0 引言
感应电机(induction motor, IM)具有转子结构坚 固、可靠性高、成本低等优点。采用矢量控制的感 应电动机交流调速系统已广泛应用于家用电器、电 梯曳引、汽车、机床等领域。采用电压源逆变器作 为感应电机的驱动装置时,由于受到驱动器最大输 出电压和电流的限制,高转速下,需要采用弱磁等 方法来实现恒功率运行;低速下,一般采用定子励 磁电流恒定,并调节定子转矩电流分量大小的控制 方法,但在轻载时采用这种方法的系统效率不高。 为了使感应电机在高速下仍然有足够大的转 矩输出,需要研究特殊的弱磁控制策略。传统弱磁 方法采用令磁链与电机转速成反比的控制算法[1-2], 这类方法没有考虑直流母线电压波动的影响,也不 能实现最大转矩输出[3]。实际应用较多的是通过查 表修正等方法对磁链进行控制[4-11],这类方法大多 需要知道基速,且在励磁电感等参数发生变化时控 制效果会受一定影响。文献[12]提出了一种过调制 算法用于判断永磁同步电动机的弱磁工作点,但如 何应用于感应电机尚待研究。近年来,利用 dq 轴 电压参考进行弱磁控制的方法受到了越来越多的 关注[13-14],电压参考值和它的最大限制值之间的偏 差用于确定 d 轴电流的大小。这种方法对参数不敏 感,但如何最大限度地利用直流母线电压仍需研 究。在此基础上,文献[15]提出一种基于电压轨迹
uq 恒转矩曲线 MTPV 线
(16)
可见,通过判断零矢量的作用时间 T0(T0Ts T1T2)是否大于 0 可以作为弱磁与否的条件。当 T00 时,可认为电压矢量已经无法输出,达到了 极限,此时就需要进行弱磁。因此可设计弱磁算法 如下
* id T0 dt
(17)
(14)
式(13)、(14)构成了电流轨迹平面(id, iq)上的电 流限制圆和电流限制椭圆,如图 1 所示。所有的电 流轨迹点都要在这两者重合的面积范围内。转速增
(5)
加时,椭圆的面积减小。 将式(10)代入式(13),可得
iq
式中 r为转子时间常数, rLr/Rr。
94
中
国
电
机
工
程
学
报
第 31 卷
控制的弱磁方法,该方法不需查表,且不需知道直 流母线电压等参数,但仍需要知道额定励磁电流的 大小。 本文建立了感应电动机的稳态数学模型,研究 了全速度范围下的电压和电流约束条件。通过分析 约束条件,提出了一种根据零电压矢量的作用时间 改变 d 轴定子电流大小的弱磁控制算法。同时还研 究了最大转矩电流比(maximum torque per ampere, MTPA) 算法和实现最大转矩控制时的电压电流运 行轨迹及其控制方法。 最后在 5.5kW 的系统上进行 了仿真和实验验证。
基金项目:国家自然科学基金项目(50877030);国家科技重大专项 资助项目(2009ZX04010)。 Project Supported by National Natural Science Foundation of China (50877030); National Science & Technology Major Project (2009ZX04010).
(8) (9)
Fig. 1
图1
全转速范围区的电流限制
sLm iq/( r r)
Current constraints in the whole speed range
第 30 期
万山明等:感应电动机转子磁场定向下的弱磁控制算法
95
(
uq
1 Ls
)2 (
由式(1)、(3)、(4)可得 usRs is(Dj 1)(LisLm r/Lr)
(6)
速度增加 电流限制圆
恒转矩曲线
式中 L 为漏感,LLs,其中为漏感系数,
1L2 m/(Ls Lr)。将感应电动机 T 形等效电路中的电
1 Ls
ud
2 )2 I max
(15)
端点的活动范围在 6 个非零的特定矢量构成的六边 形内,在对应扇区内空间电压矢量可以分解成 2 个 相邻的非零矢量,其作用时间 T1、T2 必须小于开关 周期 Ts,即: T1T2Ts
由式(12)、(15)构成了电压轨迹平面(ud, uq)上的 电压限制圆和电压限制椭圆,如图 2 所示,所有的 电压轨迹点都要在这两者重合的面积范围内。转速 增加时,椭圆的面积增大。
2 2 id iq I max
机所承受的最大电压和最大电流分别为
2 2 ud uq U max
0Rr irD rj s r
(12) (13)
sLs isLm ir
rLr irLm is
式中:us 为定子电压矢量;is、ir 分别为定子、转子 电流矢量; s、 r 分别为定子、 转子磁链矢量; 1、
式中 Umax、Imax 分别为逆变器所能提供的最大电压 (相电压峰值)和最大电流(相电流峰值)。 将式(10)代入式(12),可得
2 ( 1Ls iq)2( 1 Ls id)2Um ax
s 分别为同步电角速度和转差电角速度;Rs、Rr 分
别为定子、转子电阻;Ls、Lr 分别为定子、转子自 感;Lm 为互感;D 为微分算子;下标为 s、r 的量 分别代表定子和转子侧的物理量。 由式(2)—(4)可得 Lm is( rD1j s r) r
第 31 卷 第 30 期 2011 年 10 月 25 日 文章编号:0258-8013 (2011) 30-0093-07
中
国 电 机 工 程 学 Proceedings of the CSEE 中图分类号:TM 351
报
Vol.31 No.30 Oct.25, 2011 ©2011 Chin.Soc.for Elec.Eng. 学科分类号:470·40
3 最大转矩控制算法
由式(11)可见,令 id 为常数时,iq 与电磁转矩 Me 成正比。 与这种传统控制方法相比, 采用最大转 矩电流比控制可以在相同的定子电流幅值情况下, 获得更大的电磁转矩。如图 1 所示,只有当 id|iq| 时才能实现最大转矩电流比控制,因此将 id|iq| 对应的两条直线称为 MTPA 线。 MTPA 法的缺点是 id 随转矩的变化而变化,由式(8)可见,此时转子磁 链会随 id 变化,且有一个响应滞后的过程,因此与 传统控制方法相比, MTPA 法的动态响应性能稍差。 将式(10)代入式(11),可得 L2 3 M e N p 2 m 2 uq ud 2 1 Lr Ls
1 感应电动机的数学模型
理想条件下,在 dq 同步坐标系下建立的感应 电动机定子电压和磁链方程为 usRs i电动机矢量控制系统由三相电压源逆变 器驱动时,由于受驱动器容量的限制,驱动器可以 提供的电压和电流矢量的幅值是有限的,因此电动 (1) (2) (3) (4)
Umax
Umax ud
式中为一个正常数,它决定了 id 的变化速度。在
电压限制圆 电压限制 椭圆
执行完弱磁算法后,应采用过调制算法对 T1 、 T2 进行限幅处理以便最后输出。根据式(17),当 T00 后,id 将逐渐增加,直至达到其最大限幅值。
速度增加
图2 Fig. 2
全转速范围区的电压限制
WAN Shanming, CHEN Xiao
(State Key Laboratory of Advanced Electromagnetic Engineering and Technology (Huazhong University of Science and Technology), Wuhan 430074, Hubei Province, China) ABSTRACT: In many applications such as electrical vehicle and computer numerical control machine, induction motor (IM) needs large speed range operation with constant output power. A new current and voltage trajectories control scheme for the field weakening operation of induction motor drive was presented. The proposed scheme allows the motor to exploit the maximum torque capability in the whole speed range with the constraints of maximum voltage and current of the motor and inverter. In the proposed control algorithm the lookup table is not required for currents references obtaining, which reduces the dependence on the motor parameters. The smooth transition between maximum torque per ampere (MTPA) and field weakening regions is implemented according to the integration of the time of zero voltage vector in SVPWM method. The validity of the proposed field weakening technique is validated by computer simulations and experimental tests with a 5.5kW induction motor drive system. KEY WORDS: induction motor (IM); field weakening; zero voltage vector; maximum torque per ampere (MTPA) control 摘要: 电动汽车、 数控机床等应用领域要求感应电动机具有 宽范围的恒功率弱磁调速能力。 提出一种感应电动机弱磁状 态下电压和电流轨迹控制的新方法。 在满足电机和驱动器最 大电压和电流约束条件的前提下, 该方法可实现全速度范围 内的最大转矩输出。 此方法不需要查表运算, 对电机参数的 依赖性较低。通过对 SVPWM 方法中得到的零电压矢量作 用时间的积分, 可得到 d 轴电流的给定值, 从而实现最大转 矩电流比(maximum torque per ampere, MTPA)控制区与弱磁 区之间的平滑过渡。在 5.5kW 系统上对所提弱磁方法进行