转子磁场定向矢量控制与气隙磁场定向矢量控制的区别
双馈风力发电的矢量控制策略-电机及其系统分析与仿真..

双馈风力发电的矢量控制策略双馈电机在结构上与三相绕线式异步电机类似, 其定子和转子均安放三相对 称绕组,都可以与电网进行能量的交换。
其定子绕组直接接入工频电网,转子绕 组通过双馈变流器与电网连接。
转子绕组连接于一个频率、相位、幅值均可调的 三相电源激励, 转子通入励磁电流产生旋转磁场,再加上转子的转速在气隙中产 生一个同步旋转磁场。
通过控制输入转子绕组的电流,不仅可以保证电机定子侧 输出的电压和频率保持与电网电压一致, 而且还可以调节双馈电机定子侧的功率 因数。
稳态运行时, 双馈变流器根据所检测的电机转速调节流入双馈电机转子绕 组的励磁电流频率以保证定转子电流所产生的旋转磁场在空间上保持相对静止, 实现定子侧感应电势的频率与电网频率相同, 以实现双馈型风力发电系统的变速 恒频运行。
双馈风力发电的系统原理图如图 1 所示。
图 1 双馈风力发电系统原理图 双馈变换器目前的多采用两电平双 PWM 变换器,其结构图如图 2 所示。
图 2 两电平双 PWM 变换器11 双馈发电机的数学模型1.1 三相坐标轴系下数学模型 定子绕组采用发电机惯例,定子电流流出为正,转子绕组采用电动机惯例, 转子电流流入为正。
则双馈发电机在三相静止坐标轴系下的模型为图 3 所示:图 3 三相坐标轴系下双馈发电机模型 针对此模型可以得到三相坐标轴系下电压方程、磁链方程、运动方程和转矩 方程为: 电压方程: (1)转子侧电压方程:(2)定子侧电压方程:2ua1、ub1、uc1、ua2、ub2、uc2 分别表示定转子电压,下标为 1 表示为定子侧, 为 2 表示转子侧;ψa1、ψb1、ψc1、ψa2、ψb2、ψc2 表示定、转子侧磁链;ia1、ib1、 ic1、ia2、ib2、ic2 为定子,转子相电流;R1、R2 为定子,转子绕组的等效电阻。
(3)磁链方程:其中Lm1 是与定子绕组交链的最大互感磁通对应的定子电感;Lm2 是与转子绕 组交链的最大互感磁通对应的转子互感; Ll1,Ll2 分别为定,转子漏电感; θ 为转子的位置角。
异步电动机转子磁链观测方法的比较与研究

异步电动机转子磁链观测方法的比较与研究转子磁链、观测方法、比较、矢量控制、直接转矩控制1 引言在异步电动机变频调速控制系统中,矢量控制技术和直接转矩控制技术得以有效实现的一个重要基础是在于异步电动机磁链信息的准确获取,这就需要知道磁链的幅值和相位。
根据三相异步电动机在两相任意转速旋转坐标系下的数学模型可知,定子、转子和气隙磁链的方程式为:定子磁链:(1)转子磁链:(2)气隙磁链:(3)从以上方程式不难看出定子、转子和气隙磁链三者只要有一个获得,另外两个就可推导而出。
因此异步电动机就有三种与之相对应的磁场定向方法,分别是按定子磁场定向、按转子磁场定向和按气隙磁场定向。
不过按定子、气隙磁场定向方法未能实现iM和iT的完全解耦,因此按转子磁场定向是目前主要采用的方法,它可以实现磁通电流分量、转矩电流分量的完全解耦。
下面就对转子磁链观测的方法进行一些比较研究,从而为实际应用时选择合适的观测器提供依据。
转子磁链的观测最初是采用直接检测气隙磁链的方法,就是在电机定子内表面装贴霍尔元件或其他磁敏元件,或者在电机槽内埋设探测线圈。
利用被测量的气隙磁通,由式(2)、(3)就可得到转子磁通。
从理论上讲,该方法应该比较准确,但实际上埋设探测线圈和装贴磁敏元件都会遇到不少工艺和技术上的问题,在一定程度上破坏了电机的机械鲁棒性。
同时由于齿槽影响,使检测信号中含有较大的脉动分量,越到低速时越严重。
因此在实用的系统中,多采用间接计算的办法,即利用容易测量的电压、电流或转速等信号,借助转子磁链观测模型,实时计算磁链的模值和空间位置。
2 转子磁链的间接获取方法根据实测信号的不同组合,可以有多种转子磁链观测模型,总的说来可以分为两大类:开环观测模型和闭环观测模型。
2.1 开环观测模型(1)电流模型法根据描述磁链与电流关系的磁链方程来计算转子磁链,所得出的模型叫做电流模型,它可以在不同的坐标系下获得。
● 在两相静止坐标系α-β下转子磁链的电流模型由实测的三相定子电流经过Clarke变换很容易得到两相静止坐标系上的电流isα和isβ。
永磁同步电机基础知识

(一) PMSM 的数学模型交流电机是一个非线性、强耦合的多变量系统。
永磁同步电机的三相绕组分布在定子上,永磁体安装在转子上。
在永磁同步电机运行过程中,定子与转子始终处于相对运动状态,永磁体与绕组,绕组与绕组之间相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,要建立永磁同步电机精确的数学模型是很困难的。
为了简化永磁同步电机的数学模型,我们通常做如下假设:1) 忽略电机的磁路饱和,认为磁路是线性的;2) 不考虑涡流和磁滞损耗;3) 当定子绕组加上三相对称正弦电流时,气隙中只产生正弦分布的磁势,忽略气隙中的高次谐波;4) 驱动开关管和续流二极管为理想元件;5) 忽略齿槽、换向过程和电枢反应等影响。
永磁同步电机的数学模型由电压方程、磁链方程、转矩方程和机械运动方程组成,在两相旋转坐标系下的数学模型如下:(l)电机在两相旋转坐标系中的电压方程如下式所示:d d s d d c q q q s q q c d di u R i L dt di u R i L dt ωψωψ⎧=+-⎪⎪⎨⎪=++⎪⎩其中,Rs 为定子电阻;ud 、uq 分别为d 、q 轴上的两相电压;id 、iq 分别为d 、q 轴上对应的两相电流;Ld 、Lq 分别为直轴电感和交轴电感;ωc 为电角速度;ψd 、ψq 分别为直轴磁链和交轴磁链。
若要获得三相静止坐标系下的电压方程,则需做两相同步旋转坐标系到三相静止坐标系的变换,如下式所示。
cos sin 22cos()sin()3322cos()sin()33a d b q c u u u u u θθθπθπθπθπ⎛⎫ ⎪-⎛⎫⎪⎛⎫ ⎪⎪=--- ⎪ ⎪⎪⎝⎭ ⎪⎪⎝⎭ ⎪+-+⎝⎭(2)d/q 轴磁链方程: d d d f q q qL i L i ψψψ=+⎧⎪⎨=⎪⎩ 其中,ψf 为永磁体产生的磁链,为常数,0f r e ωψ=,而c r p ωω=是机械角速度,p 为同步电机的极对数,ωc 为电角速度,e0为空载反电动势,其值为每项倍。
异步电机矢量控制系统的设计及仿真研究

在定子 电流的两 个分 量之 间实 现 了解耦 , i 唯一 决定 磁链 i则 只影 响转矩 , 与直流 电机 中的励磁 电流和 电枢 电流
相对应 , 这样就大大简化 了多变量强耦合 的交流变频调 速系
r b s e s h p e e u ao n ec re t e l tro a i o a e trc n rlu e P o tolr a d t e s e d o u t s .T e s e d r g l tra d t u r n g ao ft d t n lv c o o t s 1 n r l , n h p e n h ru r i o c e r s o s s o e v rh o n t e c n r lp o e s n o d rt o v h s rb e ,we p o o e e in meh d o e p n e f n o e s o ti h o t r c s .I r e o s l e t e e p o lms t o rp s d a d sg t o f s e d c n rl ri h n u t n mo o e trc n r l o e p r o e o u p e sn p e e p n e o es o t n i— p e o t l n t e id ci trv co o to rt u p s fs p r si g s e d r s o s v r h o n oe o f h i d ci n mo o e trc n r la d e h n i g i u t trv co o to n n a cn mmu i . T e i d ci n moo s d f l r n e e tr c n rl t — o nt y h n u t tr u e ed o e t d v c o o t o a o i i o
矢量控制详细介绍
i i*st
旋转
s*
i i*sm
逆变换 VR-1
s*
iA*
2/3 iB*
iC*
器
器
iA iB
iC
发生
器
sin cos
向量 分析
积分
VA
ωs*
ω1 ωr
i*A
iA
i*B
iB i*C
iC
A B C
i*A
iA
1ACR u*A
A
i*B
2ACR u*B PWM
B
iB
i*C
3ACR u*C
C
iC
• 对电流的控制是采用滞环比较的方法,但 缺点是其谐波含量不是最优的,当电机速 度较高时,由于存在较高的反电动势,电 流控制器在某些时段内将趋于饱和,此时 基波电流的幅值和相位将不能跟踪给定电 流,从而导致矢量控制失效。因此需要对 逆变器的瞬时电流进行控制。在电机调速 范围较宽时,可采用同步电流控制策略来 解决,也称为直流电流控制。
比足够小,那么这种平行就能得到很好的近似。(2)在 电源频率较高时,依次给出定子电压空间矢量Us,则定子 磁链的运动轨迹形成正六边形磁链。(3)低频时,利用 电压空间矢量8个开关状态的线性组合,构成一组等幅不 同相的电压空间矢量,可形成准圆形的旋转磁场。(4) 若电压空间矢量为零电压矢量Us(111)或Us(000)时, 忽略定子电阻影响,磁链空间矢量在空间保持不变。显然, 利用逆变器的8种工作开关状态,可以得到圆形或正六边 形的磁链轨迹来控制电动机,这种方法就是直接转矩控制 DTC控制的基本思想。
二、直接转矩控制的异步电动机数学模型
• 1.逆变器电压空间矢量
SA
SB
SC
矢量控制(FOC)基本原理
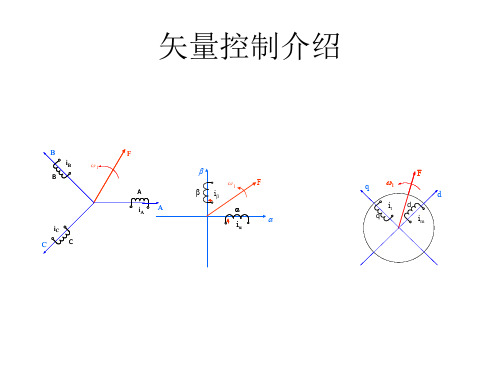
矢量控制(FOC)基本原理2014.05.15duquqiubai1234@一、基本概念1.1模型等效原则交流电机三相对称的静止绕组 A 、B 、C ,通以三相平衡的正弦电流时,所产生的合成磁动势是旋转磁动势F ,它在空间呈正弦分布,以同步转速ω1(即电流的角频率)顺着 A-B-C 的相序旋转。
这样的物理模型如图1-1a 所示。
然而,旋转磁动势并不一定非要三相不可,单相除外,二相、三相、四相…… 等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。
图1图1-1b 中绘出了两相静止绕组α 和 β ,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F 。
再看图1-1c 中的两个互相垂直的绕组M 和 T ,通以直流电流M i 和T i ,产生合成磁动势F ,如果让包含两个绕组在内的整个铁心以同步转速旋转,则磁动势F 自然也随之旋转起来,成为旋转磁动势。
把这个旋转磁动势的大小和转速也控制成与图 1-1a 一样,那么这三套绕组就等效了。
三相--两相变换(3S/2S 变换)在三相静止绕组A 、B 、C 和两相静止绕组α、β之间的变换,简称3S/2S 变换。
其电流关系为111221022A B C i i i i i αβ⎡⎤⎡⎤--⎥⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦⎢⎥-⎣⎦⎦⎣() 两相—两相旋转变换(2S/2R 变换) 同步旋转坐标系中(M 、T 坐标系中)轴向电流分量与α、β坐标系中轴向电流分量的转换关系为cos sin 2sin cos M T i i i i αβϕϕϕϕ⎡⎤⎡⎡⎤⎤=⎢⎥⎢⎢⎥⎥-⎦⎣⎦⎣⎣⎦ ()1.2矢量控制简介矢量控制是指“定子三相电流矢量控制”。
矢量控制理论最早为解决三相异步电机的调速问题而提出。
交流矢量的直流标量化可以使三相异步电机获得和直流电机一样优越的调速性能。
将交流矢量变换为两相直流标量的过程见图2。
轨道交通牵引逆变器的控制策略应用
摘要地铁主传动系统由牵引逆变器、微机控制驱动装置、牵引电动机等部件组成,牵引逆变器的控制策略是主传动系统的重要组成之一。
首先,本文说明了牵引逆变器控制的现状,指出了目前地铁牵引逆变器主要采用VVVF的两电平逆变器。
牵引逆变器的控制方法有滑差频率控制、转子磁场定向的旋转矢量控制和直接转矩控制等控制方法。
其次,在三种控制方法中,轨道交通机车中应用最广泛的是矢量控制,本文将以阿尔斯通机车为依托,具体分析矢量控制在轨道交通机车中应用。
关键词:地铁,电力牵引,逆变器控制,矢量控制ABSTRACTThe devices of the main driver system in subway mainly consist of traction inverter driver ,equipment with micro-computer control and traction motor. Traction inverter control strategy is one of the important component of the main drive system.Firstly,this paper reports the development and actuality of main traction inverter driver,indicates the traction inverter in Chinese metro is two-level inverter of VVVF,The control methods,including control of frequency slope,roto field-oriented vector control and direct torque control,is applied to main drive system.Secondly, in the three control methods, the best far-ranging device in Chinese metro is vector control. this paper reports the appliance of the vector control in shanghai alasm metro.Key words: metro,electric traction,inverter control,vector control目录1 绪论 (1)1.1地铁发展的背景和发展概况 (1)1.2地铁车辆牵引传动系统的发展 (2)1.3本文的研究意义和主要研究内容 (3)2粘着技术 (5)3轨道交通牵引逆变器力矩控制方法的比较 (7)3.1滑差控制(滑差频率-电流控制) (7)3.2转子磁场定向的旋转矢量控制 (8)3.3直接转矩控制 (9)3.4三种主要控制的比较 (9)4逆变器控制在阿尔斯通轨道机车中的应用 (11)4.1 轨道交通机车对牵引系统控制的要求 (13)4.2 轨道交通牵引电机的特点 (13)4.3矢量控制在轨道交通机车中的应用 (16)4.4轨道交通矢量控制的仿真试验波形 (22)4.5采用矢量控制方式的轨道交通机车在实际运行中的应用 (30)4.6矢量控制在轨道交通机车中遇到的问题以及解决办法 (34)5 结论 (36)参考文献 (37)1 绪论作为城市公共交通系统的一个重要组成部分,在我国国家标准《城市公共交通常用名词术语》中,将城市轨道交通定义为“通常以电能为动力,采取轮轨运转方式的快速大运量公共交通之总称。
矢量控制_精讲

矢量控制——深入讲解矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。
基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。
早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。
实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。
它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器,并需使用厂商指定的变频器专用电动机进行控制,否则难以达到理想的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 气隙磁场定向控制方案。
气隙磁场的定向控制是将旋转坐标系的M轴定向于气隙磁场的方向,此时气隙磁场的T轴分量为零。
如果保持气隙磁通M轴分量恒定,转矩直接和T轴电流成正比。
因此,通过控制T轴电流,可以实现转矩的瞬时控制,从而达到控制电机的目的。
2. 定子磁场定向控制方案。
定子磁场定向的控制方法,是将旋转坐标的M轴放在定子磁场方向上,此时,定子磁通的T轴分量为零。
如果保持定子磁通恒定,转矩直接和T轴电流成正比,从而控制电机。
定子磁场定向控制使定子方程大大简化,从而有利于定子磁通观测器的实现。
然而此方案在进行磁通控制时,不论采用直接磁通闭环控制,还是采用间接磁通闭环控制,均须消除耦合项的影响。
因此,需要设计一个解耦器,对电流进行解耦。
3. 转子磁场定向控制方案。
转子磁场定向的控制方法是在磁场定向矢量控制方法中,将M,T坐标系放在同步旋转磁场上,将电机转子磁通作为旋转坐标系的M坐标轴。
若忽略由反电动势引起的交叉祸合,只需检测出定子电流的M轴分量,就可以观测转子磁通幅值。
当转子磁通恒定时,电磁转矩与定子电流的T轴分量成正比,通过控制定子电流的T轴分量就可以控制电磁转矩。
因此称定子电流的M轴分量为励磁分量,定子电流的T轴分量为转矩分量。
可由电压方程M轴分量控制转子磁通,T轴分量控制转矩,从而实现磁通和转矩的解耦控制。
下面对它们进行简要的总结和比较:
气隙磁场定向系统中磁通关系和转差关系中存在耦合,需要增加解耦器这使得它比转子磁通的控制方式要复杂,但具有一些状态能直接测量的优点,比如气隙磁通。
同时电机磁通的饱和程度与气隙磁通一致,故基于气隙磁通的控制方式更适合于处理饱和效应。
定子磁场定向的矢量控制方案,在一般的调速范围内可利用定子方程作磁通观测器,非常易于实现,且不包括对温度变化敏感的转子参数,可达到相当好的动静态性能,同时控制系统结构也相对简单,然而在低速时,由定子电阻压降占端电压的大部分,致使反电动势测量误差较大,导致定子磁通观测不准,影响系统性能。
定子磁场定向的矢量控制系统适用于大范围弱磁运行的情况。
转子磁场定向的控制方案,缺点是磁链闭环控制系统中转子磁通的检测精度受转子时问常数的影响较大,降低了系统性能。
但它达到了完全的解耦控制,无需增加解耦器,并且不存在静态稳定性限制的条件,控制方式简单,具有较好动态性能和控制精度,故应用最为广泛。