导线网平差
使用 PA2005 软件进行导线精密平差
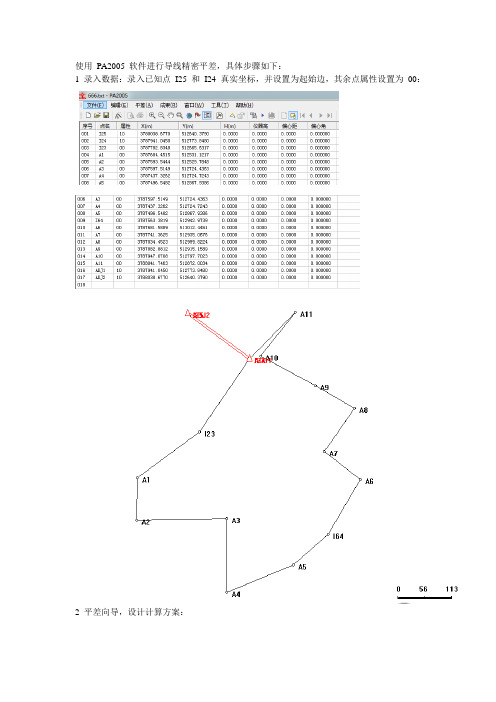
使用PA2005 软件进行导线精密平差,具体步骤如下:1 录入数据:录入已知点I25 和I24 真实坐标,并设置为起始边,其余点属性设置为00:2 平差向导,设计计算方案:3 平差计算:4 闭合差计算:5 控制网平差报告:控制网平差报告计算软件:南方平差易2005网名:计算日期:2015-11-5观测人:王宁宁记录人:王冬计算者:熊猛猛检查者:测量单位:备注:平面控制网等级:城市二级,验前单位权中误差:1.41(s)已知坐标点个数:4未知坐标点个数:13未知边数:14最大点位误差[A5] = 0.0425 (m)最小点位误差[A11] = 0.0206 (m)平均点位误差= 0.0344 (m)最大点间误差= 0.0312(m)最大边长比例误差= 4626平面网验后单位权中误差= 4.21 (s)[边长统计]总边长:1900.251(m),平均边长:135.732(m),最小边长:90.917(m),最大边长:194.692(m)[闭合差统计报告]序号:<1>:附合导线路径:[ADJ2-ADJ1-A11-A10-A9-A8-A7-A6-I64-A5-A4-A3-A2-A1-I23-I24-I25]角度闭合差=-44.00(s),限差=±10.92(s)fx=0.006(m),fy=0.068(m),fd=0.068(m)总边长[s]=1900.251(m),全长相对闭合差k=1/27966,平均边长=135.732(m)[方向观测成果表][平面点位误差表]5.3.7 坐标转换参数计算已知点录入:计算结果:可由DX、DY、R 和DK 值算得四参数为:a=DK*COSR=0.999868617;b=DK*sinR=-0.016392281;c=DX=3788038.6761196m ;d=DY=512640.380192 5588m。
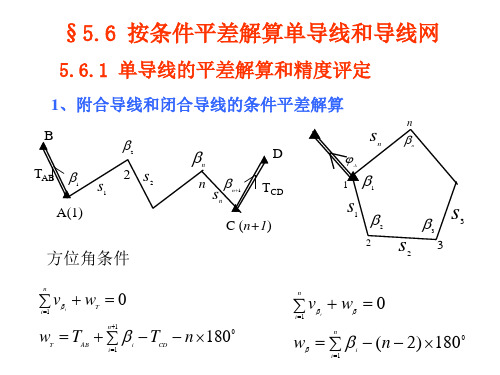
按条件平差解算单导线和导线网
n
n
1
wy = ∑ ∆yi,i+1
i =1
n
i =2
ρ
5.6.1 单导线的平差解算和精度评定
2、 无定向导线和单定向导线的平差解算 、
β
T1
2
β
s
2
n
2
s
1
n
1
Tn
sn
n+1
引入方位角条件未知数T1,Tn,采用附有未 知数的条件平差模型计算。其条件方程如下: 方位角条件:
∑ vβ + δ T − δ T + wT = 0
1
J
n
J+1
每个导线段可列出3个条件:
坐标方位角的条件式:∑ v β + δ TJ − δ TJ +1 + wT
i =1
i
nj
J , J +1
=0
其中: wT
J , J +1
= TJ + ∑ v β − TJ0+1 − n J × 180
0 i =1
i
nj
5.6.2 导线网的平差解算和精度评定
纵坐标条件式: ∑ cos Ti v s − ∑
i
ρ
1
ρ
n
wy = yA + ∑ ∆yi0,i+1 − yc
i =1
n
5.6.1 单导线的平差解算和精度评定
如果只在导线的一端引入方位角未知数 T1,则只 能列出如下两个坐标条件:
0 0 ∑ cosTi vs − ∑ ( yn+1 − yi )vβ − ( yn+1 − y1 )δ T + wx = 0 0 0 0 i =1
图根导线结点网平差软件设计及实现

Hale Waihona Puke 城市勘测
2 0 1 3年 1 2月
( 2 ) 闭合差 检核 功能 闭合 差 的检核 主要包 括 三个方 面 : 角度 闭合 差 、 坐
借助 M i c r o s o t f O f i f c e Wo r d 2 0 0 3的 O L E组 件实 现
制点测量的效率 , 相 比传统的三角测量、 G P S 静态测量
等 方式 更加 轻 松 、 迅 捷 。同 时 , 随 着城 市 的发 展 , 高 楼 大 厦越 来 越 多 , 卫 星信号 的遮挡也 影 响了 G P S — R T K 的测量 , 因此 “ R T K+ 全站仪” 的 测 量 模 式 很 好 地解 决
2 0 1 3年 1 2月 第 6期
城
市
勘
测
De c . 2 01 3
Ur b a n Ge o t e c h n i c a l I n v e s t i g a t i o n& S u r v e y i n g
No . 6
文章编号 : 1 6 7 2 — 8 2 6 2 ( 2 0 l 3 ) 0 6 — 1 4 3 — 0 4
了数字 化地 形 图测 量 中 图根 控 制 网 的测 绘 工作 , 采 用
读取 观测数据、 已知点 数据 、结点信息文件 搜索起算 点到结点、结点到结点的线路 检查观测数据 、 已知 点数据等
上 述测 量模 式测 设 的 导线 控 制 网灵 活 多 变 , 为 了对 图
根导线结点网的成果计算 , 编写 了一套 自动化高 的平
中图分类号 : P 2 0 9
文 献标 识码 : B
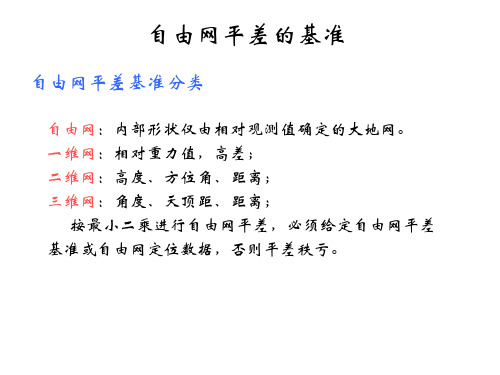
第二章2自由网平差基准
(4‘)
平差前和平差后重心点至各点的边长平方和相等。
经典自由网平差
基准:一个点坐标,一条边方位,一边长,平差前后保持不变,
秩亏网平差中,以(1’)——(4‘)式代替,其中(1’)(2‘)式为网的平移, (3’) 式定向,(4)式边长缩放,
根据重心坐标,为了计算方便,当近似值取定后。可先进行重心化—— 就是把坐标原点移至重心点处。
2. 二维测角网
假设所有点的纵横坐标为未知数,给定网中两个点的坐标为 固定(已知)坐标或一个点的纵横坐标、一条边方位角、一条边的边 长为固定值(已知)。
——这些固定数据构成网的平差基准。
设
GCT Xˆ 0
为基准方程
①当1、2两点已知(固定)坐标,则:
Xˆ 1 Yˆ1 Xˆ 2
0
V3 1
1 1 0
110XXXˆˆˆ132
0 0 6
(2)
X3 X30 设 X3X30Xˆ3
Xˆ3 0
称为基准条件方程
GCT 0 0 1 ,GCTXˆ 0 ,其中 X ˆX ˆ1 X ˆ2 X ˆ3 13
(Yi2Xi2) Si2
H
i1
i1
标准化后G:
1
m
0
0 1
1 m 0
0
....
1
...
GT
Y1
m X1
Y2
m
X2
...
m m m m
X
1
m
Y1 X 2 mm
Y2
...
网平差(三角网,三边,导线网)

五.三角网平差图9-1表示在高级点A 、B 下加密新点P1,P2的三角网,网中观测了12个方向值L1,L2,...,L12。
试平差此三角网,求:(1)待定点P1及P2的坐标平差值及其中误差;(2)P1与P2点的相对点位中误差。
P 2图9-1 三角网表9-3 三角网观测数据六.三边网平差已知图9-2中的起算数据及观测边长,试平差此三边网,求各观测边长和待定点坐标的平差值,以及各待定点的点位中误差。
P 2P P 4P 56图9-2 三边网表9-4 三边网已知及观测数据1 5 760.706 4 7 838.880 7 5 438.382 2 7 804.566 5 5 483.158 8 7 493.323 3 5 187.3426 5 731.7889 8 884.587107 228.367七.导线网平差图9-3为敷设在已知点A 、B 、C 间的单结点导线网,网中观测了12个角度,丈量了9个导线边。
起算数据和观测结果见表9-5。
已知测角中误差14m β''=±,边长丈量中误差i s m =±。
求各导线点的坐标的平差值;观测值的中误差,9号点及结点G 的点位中误差。
AαB图9-3 导线网表9-5 导线网已知及观测数据 A 11678.714 8419.242 A274 23 34 B 10878.302 8415.114 B α 8 10 27 C 11131.959 7722.199α194 20 121221.6504189.7817148.3372 195.843 5 98.163 8 151.4803 229.356 6 154.773 9 187.751。
导线平差计算表格及解析

闭合导线坐标计算
注:黄色部分为外业测量出的或者是已知的;
“n”:多边形内角的个数;
“ƒβ容”:图根导线角度闭合差的容许值为±60″√n,当图根导线作为测区的首级控制网时为±40″√n;
β=β测-ƒβ n;
在这儿坐标方位角的计算就不说了;
△x i,1+i=D i,1+i*cosαi,1+i; △y i,1+i=D i,1+i*sinαi,1+i;
ƒx=Ʃ△x,ƒy=Ʃ△y;
导线全长闭合差ƒ=√(ƒ2x+ƒ2y),相对闭合差K=ƒ∕ƩD,图根导线的容许相对闭合差K容=1∕2000,当K<K容时则说明符合精度要求,可以进行调整,
υ△xi,1+i=-(ƒx∕ƩD)*D i,1+i,υ△yi,1+i=-(ƒy∕ƩD)*D i,1+i;
△x △y x y
υ△xi,1+i υ△yi,1+i ±±
△x i,1+i
△y i,1+i
Ʃ
ƩD ƒx ƒy
辅助计算
观测角 (β测) ′ ″改正数
(β) 改正后角度 ′ ″
坐标方位角 ′ ″
56序号1234△x′△y′ƒβ角度闭合差=Ʃβ测-Ʃβ
理=Ʃβ测-(n-2)*180; ƒβ
≤ƒβ容;
ƒx=Ʃ△x,ƒy=Ʃ△y; ƒD =√(ƒ2x +ƒ2y )
注:1、附合导线和闭合导线的差别在于两个方面:①角度闭合差的计算和调整,②坐标增量闭合差的计算;(怎么计算就不一一说了,见谅!)
坐标增量 m 改正后增量 m
坐标值 m 距离 m。
全站仪坐标导线测量的平差方法

随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
应用全站仪观测导线,可以通过机内的微处理器,直接得到地面点的平面近似坐标,因此在成果处理时可以应用这些近似坐标直接按坐标平差(即间接平差)法进行平差。
本文主要针对采用全站仪观测导线的近似平差和严密平差方法进行探讨。
导线的近似坐标平差导线测量用于图根控制等低精度测量中,往往采用近似平差即可。
由于全站仪直接测定各导线点的近似坐标值,平差计算就不用像传统的导线近似平差计算那样,先进行角度闭合差计算和调整,然后推算方位角,再进行坐标增量闭合差的计算和调整,最后根据平差后的坐标增量计算导线点的坐标。
全站仪观测导线直接按坐标平差计算,将更为简便。
直接按坐标平差法计算步骤如下:假设有一条附合导线,由于存在观测误差,最后测得的一点(假设为C)坐标与该点已知坐标(xc,yc)不一致,其差值即为纵、横坐标增量闭合差,即(1)导线全长闭合差为f:(2)导线全长相对闭合差为:(3)此时若满足要求的精度,就可以直接根据坐标增量闭合差来计算各个导线点的坐标改正数,各导线点的坐标改正值计算公式为:(4)改正后各点坐标xi、yi为:(5)式中,∆x1、∆x2、∆x i、∆y1、∆y2、∆y i、分别为第一、第二和第i条边的近似坐标增量;x i’、y i’为各待定点坐标的观测值(即全站仪外业直接观测的导线点的坐标)。
采用坐标法进行导线近似平差,直接在已经测得导线点的坐标上进行改正,方法简单,易于掌握,避免了传统近似平差法的方位角的推算和改正,以及坐标增量的计算和改正,能大大提高工作效率,而且不易出错。
同时可以看出传统附和导线测量需要两条已知边,作为方位角的检核条件,而直接坐标法,只需要一条已知边和一个已知点即可,使导线的布网更加灵活。
导线的严密坐标平差采用全站仪观测导线的优势高等级平面控制测量对精度的要求较高,需要严密平差。
全站仪观测的导线采用严密坐标平差法较为适宜。
《控制测量》第15讲导线网归算、投影、平差计算.
w环 i 1 (n - 2) 180
n
式中,n′为闭合环内角个数。环形闭合差的限值为 环 2 n m 源自昆明冶金高等专科学校测绘学院
一、导线测量的概算
4、导线测量的验算(质量检核)
2)计算导线测角中误差 三、四等导线,应按左、右角进行测量,此时导线的测角中误差按下式 计算: m 2n 式中: Δ——测站圆周角闭合差(″);
一、导线测量的概算
2、方向观测值的归算
2)将椭球面上的方向观测值归算至高斯平面 需要加入“方向改化”,方向改化的计算公式 :
( x2 x1 ) ym 2 2 Rm 2 ( x2 x1 ) ym 21 2 Rm
12
2
式中,x、y均为近似值, y 1 ( y y ) m 1 2
N——
f 的个数。
测角中误差不应超过相应等级测角中误差的标称值。
昆明冶金高等专科学校测绘学院
一、导线测量的概算
4、导线测量的验算(质量检核)
3)测距边单位权中误差
式中
[ Pdd] 2n
——单位权中误差;
d ——各边往、返距离的较差(mm); n ——测距边数;
P ——各边距离的先验权,其值为 2 , D 为测距的先验中误差, D 可按测距仪器的标称精度计算。
n——Δ的个数。
昆明冶金高等专科学校测绘学院
一、导线测量的概算
4、导线测量的验算(质量检核)
2)计算导线测角中误差 当导线网内有多个方位符合条件时,可按方位角条件闭合差计算测角中 误差: 1 f f m [ ] N n 式中:
f ——符合导线或闭合导线环的方位角闭合差(″); n——计算 f 时的测站数;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
'******************************************************************************* ****' 本程序用于单一附(闭)合导线严密平差计算,采用按角度条件平差法。
以方向观测值中'误差的先验值作为单位权中误差。
计算结果可求得各待定点的坐标平差值及其点位精度Mx,My,'及M,并计算出各待定点误差椭圆元素E,F,Z''参考文献:郭久训.《控制网平差程序设计》北京:原子能出版社,2004.8''平差数据来源:潘正风等.《数字测图原理与方法》武汉大学出版社186页表6-5''等级:所用平差数据为首级图根导线数据(精度很不高)。
本程序中写出了方位角和导线全长相对闭合差的判'别,但考虑到程序的通用性,将这些限差判断当作了注释处理,而不实际运行。
''程序不足:没有导线网的图形表达。
'******************************************************************************* ****Private i%, j%, n%, tc#, tb#, B_x!, B_y!, e1!, e2!, m!, m0#, z#, aa As Boolean, bb As Boolean, cc As Boolean ',dd As BooleanPrivate Naa#(2, 2), Naa逆#(2, 2), W#(2), K#(2), qq#(2), fx#(2), fy#(2)Private A#(), Q#(), V#(), C#(), mx#(), my#(), mk#(), e#(), f#(), zz#()Private Po() As Point'文件格式说明:'文件格式详见文件"平差数据.txt"'Private Sub 打开文件_Click() '打开文件Dim ff$, temp$, A_name$, A_x!, A_y!, A_l#, A_s!, B_name$, B_l#, C_name$, C_x!, C_y!, D_name$, D_x!, D_y!Form1.Cls '清屏CommonDialog1.DialogTitle = "打开数据文件"CommonDialog1.FileName = ""CommonDialog1.ShowOpen'出错处理On Error GoTo FileErrff = CommonDialog1.FileName 'ff是文件路径名Open ff For Input As #1 '以顺序文件方式打开文件,使用inputLine Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, n '读取n,n为(测站数-1)ReDim Po(n) As Point '定义Po(n),其中Po(0)存A点数据,Po(n)存B点数据,Po(1)到Po(n-1)存n-1个未知点数据。
Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, m, e1, e2 '读取先验方向观测值中误差m,测距仪固定误差e1,比例误差e2Line Input #1, temp '读取文件中的说明语句Line Input #1, temp '读取文件中的说明语句Input #1, C_name, C_x, C_y '读取已知点CInput #1, A_name, A_x, A_y, A_l, A_s '读取已知点AFor i = 1 To n - 1 '读取n-1个未知点Input #1, Po(i).name, Po(i).l, Po(i).sNext iInput #1, B_name, B_x, B_y, B_l '读取已知点BInput #1, D_name, D_x, D_y '读取已知点DClose #1tc = ZBiaoFSuan(C_x, C_y, A_x, A_y) '坐标反算,求点C到A的坐标方位角,并记作tc,单位是度tb = ZBiaoFSuan(B_x, B_y, D_x, D_y) '坐标反算,求点B到D的坐标方位角,并记作tb,单位是度Po(0).name = A_name: Po(0).x = A_x: Po(0).y = A_y: Po(0).l = A_l: Po(0).s= A_s 'Po(0)存A点数据Po(n).name = B_name: Po(n).x = B_x: Po(n).y = B_y: Po(n).l = B_l 'Po(n)存B点数据For i = 0 To nPo(i).l = deg(Po(i).l) '将观测方向左角的单位度分秒化作度Next iReDim Q#(2 * n), A#(2, 2 * n), V#(2 * n), C#(1, 2 * n - 2), mx#(n - 1), my#(n- 1), _mk#(n - 1), e#(n - 1), f#(n - 1), zz#(n - 1) '变量重新定义bb = TrueMsgBox "文件已成功打开", , "提示"显示平差数据 ffExit SubFileErr:MsgBox "您的文件未打开或打开的文件格式有误!注意:请重新运行本程序!!", , "提示"End Sub'''Private Sub 开始计算_Click()If bb = True Then推算方位角和坐标 '求近似坐标求条件式'If dd = True Then '若平差数据没有超限,则进行下面的计算组法方程式求逆求K求改正数和平差值推算方位角和坐标 '求平差后坐标精度评定'Else'MsgBox "限差超限!", , "提示"'Exit Sub'End IfElseMsgBox "数据文件未打开!!", , "提示"Exit SubEnd Ifaa = TrueMsgBox "计算完毕!", , "提示"显示平差结果End Sub'''Private Sub 保存_Click()Dim ff$If aa = True ThenCommonDialog1.DialogTitle = "保存平差结果"CommonDialog1.Filter = "(*.txt)|*.txt"CommonDialog1.FileName = "平差结果.txt"CommonDialog1.ShowSaveff = CommonDialog1.FileNameIf ff = "" ThenMsgBox "文件名不能为空", , "警告"Exit SubEnd IfOpen ff For Output As #2 '以顺序文件方式保存文件,使用outputPrint #2, "平差结果:"Print #2, "---------------------------------------------------------------------------------------------"Print #2, " 单位权中误差 m0=" & Format(m0, "####.##") & " 秒"Print #2, "---------------------------------------------------------------------------------------------"Print #2, "点名", "x(m)", "y(m)", "点位误差(cm)", "E(cm)", "F(cm)", "Z(度分秒)"For i = 1 To n - 1Print #2, " " & Po(i).name, Format(Po(i).x, "########.####"), Format(Po(i).y, "########.####"), " " & Format(mk(i), "#####.##"), _" " & Format(e(i), "#####.##"), " " & Format(f(i), "#####.##"), " " & Format(zz(i), "###.#####")Next iPrint #2, "---------------------------------------------------------------------------------------------"Close #2cc = TrueMsgBox "保存完毕!", , "提示"ElseMsgBox "没有需要保存平差结果!", , "提示"Exit SubEnd IfEnd Sub'''Private Sub 退出_Click()If aa = True And cc = False Then提示.Show '若平差结果未保存则进行提示ElseEnd '若没有平差结果或平差结果已保存则退出End IfEnd Sub'''Private Sub 推算方位角和坐标()Po(0).t = tc + Po(0).l - 180If Po(0).t > 360 Then Po(0).t = Po(0).t - 360If Po(0).t < 0 Then Po(0).t = Po(0).t + 360For i = 1 To n'求方位角Po(i).t = Po(i - 1).t + Po(i).l - 180If Po(i).t > 360 Then Po(i).t = Po(i).t - 360If Po(i).t < 0 Then Po(i).t = Po(i).t + 360'求坐标Po(i).x = Po(i - 1).x + Po(i - 1).s * Cos(Po(i - 1).t / p0) 't要以度为单位Po(i).y = Po(i - 1).y + Po(i - 1).s * Sin(Po(i - 1).t / p0)Next iEnd Sub''角度改正数的单位是秒,边长改正数的单位是厘米'方向观测值中误差为单位权'方向观测值中误差的先验值为 m(秒)'角度观测值的权为 0.5'距离观测值中误差的先验值为 ms=e1+e2*s*0.0001(厘米)'Private Sub 求条件式()Dim sums!'求AFor i = 0 To n '求角度改正数系数A(0, n + i) = 1A(1, n + i) = (Po(i).y - Po(n).y) / 2062.65A(2, n + i) = (Po(n).x - Po(i).x) / 2062.65Q(n + i) = 2 '求角度观测值的权倒数Next iFor i = 0 To n - 1 '求边长改正数系数A(1, i) = Cos(Po(i).t / p0)A(2, i) = Sin(Po(i).t / p0)Q(i) = (e1 + e2 * Po(i).s * 0.0001) ^ 2 / m ^ 2 '求距离观测值的权倒数Next i'求WW(0) = (Po(n).t - tb) * 3600 '单位是sW(1) = (Po(n).x - B_x) * 100 '单位是cmW(2) = (Po(n).y - B_y) * 100 '单位是cmFor i = 0 To n - 1sums = sums + Po(i).sNext i'限差判断'这是首级图根导线的精度要求,其中 n+1 为测站数'If Abs(W(0)) > 40 * Sqr(n + 1) Or Sqr((W(1) / 100) ^ 2 + (W(2) / 100) ^ 2) / sums > 0.00025 Then '方位角闭合差和导线全长相对闭合差'Exit Sub'End If'dd = TrueEnd Sub'''Private Sub 组法方程式()Dim g%For i = 0 To 2For j = i To 2 '由于Naa是对称的,只求其上三角即可。