STM32 无中断串口代码
关于STM32串口空闲中断IDEL的问题

关于STM32串口空闲中断IDEL的问题1.空闲中断是接受数据后出现一个byte 的高电平(空闲)状态,就会触发空闲中断.并不是空闲就会一直中断,准确的说应该是上升沿(停止位)后一个byte,如果一直是低电平是不会触发空闲中断的(会触发break 中断)。
2.关于第二点有要铺垫的三个情况,datasheet 中”当一空闲帧被检测到时,其处理步骤和接收到普通数据帧一样,但如果IDLEIE 位被设置将产生一个中断”“空闲符号被视为完全由'1'组成的一个完整的数据帧,后面跟着包含了数据的下一帧的开始位'1'的位数也包括了停止位的位数”空闲符号的配图后面跟这一个低电平.有人理解为只有收到下一个数据的起始位才会触发中断,这样理解是不对的,应该是数据后有空闲了一帧就会触发.3.清中断的方式感觉奇怪,使用函数USART_ClearITPendingBit( USART1,USART_IT_IDLE )清除不了中断的.我用的是3.5 的库,查看函数说明,里面的@param 参数并没有IDLE,后面的@note 中,这样说:”PE(Parity error),FE(Framingerror),NE(Noise error),ORE(OverRun error) and IDLE(Idle line detected) pendingbits are cleared by software sequence: a read operation to USART_SR register(USART_GetITStatus()) followed by a read operation to USART_DR register(USART_ReceiveData()).”我是通过语句”USART1->DR;”来清除IDLE 中断的.现在有很多数据处理都要用到不定长数据,而单片机串口的RXNE 中断一次只能接收一个字节的数据,没有缓冲区,无法接收一帧多个数据,现提供两种利用串口IDLE 空闲中断的方式接收一帧数据,方法如下:方法1:实现思路:采用STM32F103 的串口1,并配置成空闲中断IDLE 模式且使能DMA 接收,并同时设置接收缓冲区和初始化DMA。
stm32cubemx 串口中断和回调函数运行机制
stm32cubemx 串口中断和回调函数运行机制在STM32CubeMX 中配置串口中断和回调函数的运行机制涉及到STM32 微控制器的中断系统和HAL 库的使用。
下面是一个简要的概述:1. 配置串口硬件:首先,在STM32CubeMX 中,你需要配置串口硬件,选择串口的引脚、波特率等参数。
在配置过程中,你还可以选择是否启用串口的中断。
2. 生成代码:完成硬件配置后,通过STM32CubeMX 生成初始化代码。
这将生成包含初始化串口的HAL 库函数调用的 C 代码文件。
3. 中断配置:如果启用了串口中断,STM32CubeMX 将生成相应的中断处理函数的框架,但并不会直接实现中断处理的代码。
在生成的代码中,你会看到像`USARTx_IRQHandler` 这样的中断处理函数,其中`x` 是你所配置的串口号。
你需要在这个函数中实现具体的中断处理逻辑。
4. HAL_UART_IRQHandler 函数:在中断处理函数中,通常会调用HAL 库的相应函数,如`HAL_UART_IRQHandler`。
这个函数实际上是一个通用的串口中断处理函数,它会检查串口中断的原因并调用相应的回调函数。
5. 回调函数:在HAL 库中,你可以注册一个回调函数,该函数将在串口中断发生时被调用。
回调函数的注册通常在初始化串口时完成,使用的函数是`HAL_UART_Receive_IT` 或`HAL_UART_Transmit_IT`。
这两个函数中的`_IT` 表示启用中断。
以下是一个伪代码示例,演示了串口中断和回调函数的配置:```c// 串口接收缓冲区uint8_t rxBuffer[BufferSize];// 串口中断回调函数void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {// 处理接收完成中断// 处理完后重新启动接收HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);}int main() {// STM32CubeMX 生成的初始化代码// 启动串口接收中断HAL_UART_Receive_IT(&huart1, rxBuffer, BufferSize);while (1) {// 主循环}}```在这个例子中,`HAL_UART_RxCpltCallback` 函数是串口接收完成中断的回调函数。
STM32串口配置步骤
STM32串⼝配置步骤串⼝设置的⼀般步骤可以总结为如下⼏个步骤:1) 串⼝时钟使能, GPIO 时钟使能2) 串⼝复位3) GPIO 端⼝模式设置4) 串⼝参数初始化5) 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)6) 使能串⼝7) 编写中断处理函数1.串⼝时钟使能。
串⼝是挂载在 APB2 下⾯的外设,所以使能函数为:RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);2.串⼝复位。
void USART_DeInit(USART_TypeDef* USARTx);//串⼝复位3.串⼝参数初始化。
串⼝初始化是通过 USART_Init()函数实现的,void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);USART_ART_BaudRate = bound; //波特率设置;USART_ART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式USART_ART_StopBits = USART_StopBits_1; //⼀个停⽌位USART_ART_Parity = USART_Parity_No; //⽆奇偶校验位USART_ART_HardwareFlowControl= USART_HardwareFlowControl_None; //⽆硬件数据流控制USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART1, &USART_InitStructure); //初始化串⼝4.数据发送与接收。
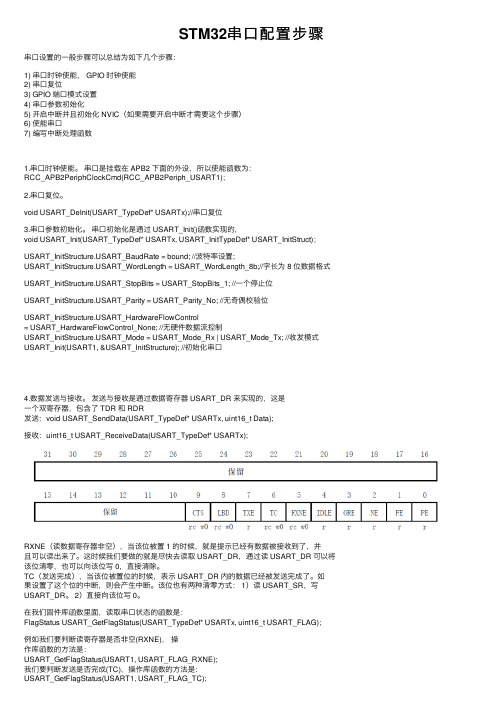
发送与接收是通过数据寄存器 USART_DR 来实现的,这是⼀个双寄存器,包含了 TDR 和 RDR发送:void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);接收:uint16_t USART_ReceiveData(USART_TypeDef* USARTx);RXNE(读数据寄存器⾮空),当该位被置 1 的时候,就是提⽰已经有数据被接收到了,并且可以读出来了。
stm32ymodem协议代码

STM32 Ymodem 协议代码STM32 Ymodem 是一种常用的串口通讯协议,它提供了一种简单、可靠的数据传输方式,主要用于嵌入式系统之间的数据通讯。
本文将介绍STM32 Ymodem 协议的代码实现,包括初始化、数据编码、数据解码、错误检测与纠正、数据传输控制、连接管理、断言与测试等方面。
1. 初始化首先需要对串口进行初始化,包括设置波特率、数据位、停止位、校验位等参数,以及启用串口中断和定时器。
此外,还需要初始化Ymodem 协议相关的参数,如重传次数、等待时间等。
2. 数据编码STM32 Ymodem 协议使用ASCII 编码方式,将数据转换成ASCII 码进行传输。
编码过程中,需要将数据加上起始符“SOH”(ASCII码为01),再将数据长度加上校验和,最后以结束符“EOT”(ASCII码为04)结尾。
3. 数据解码接收端需要对接收到的数据进行解码,解码时需要忽略起始符和结束符,以及校验和,将解码后的数据传送给应用程序。
4. 错误检测与纠正STM32 Ymodem 协议采用简单的奇偶校验方式进行错误检测与纠正。
发送端在编码数据时需要对数据进行奇偶校验,接收端在解码数据时也需要对数据进行奇偶校验。
如果发现校验错误,则可以要求重传数据。
5. 数据传输控制STM32 Ymodem 协议支持全双工通信,但仅有一个通道用于数据传输。
因此,需要在发送端和接收端之间建立通信协议,以控制数据的传输。
通常,发送端会使用中断或查询方式等待接收端准备好接收数据,接收端也会使用中断或查询方式通知发送端数据已经接收完毕。
6. 连接管理STM32 Ymodem 协议可以使用握手协议进行连接管理。
发送端和接收端之间可以通过特定的握手信号来建立连接。
通常,发送端会发送一个特殊的连接请求信号,接收端在接收到请求信号后,会发送一个应答信号,通知发送端连接已经建立。
在数据传输结束后,也可以使用握手信号来关闭连接。
7. 断言与测试在使用STM32 Ymodem 协议进行数据传输时,需要对协议本身进行断言与测试,以确保数据传输的正确性和稳定性。
STM32串口接收、发送数据实验-程序代码分析

STM32串⼝接收、发送数据实验-程序代码分析串⼝通信实验Printf⽀持printf向串⼝发送⼀些字符串数据。
如果使⽤串⼝2,可以修改while((USART1->SR&0X40)==0);和USART1->DR = (u8) ch; 中的USART1为USART2.//加⼊以下代码,⽀持printf函数,⽽不需要选择use MicroLIB#if 1#pragma import(__use_no_semihosting)//解决HAL库使⽤时,某些情况可能报错的bugint _ttywrch(int ch){ch=ch;return ch;}//标准库需要的⽀持函数struct __FILE{int handle;/* Whatever you require here. If the only file you are using is *//* standard output using printf() for debugging, no file handling *//* is required. */};/* FILE is typedef’ d in stdio.h. */FILE __stdout;//定义_sys_exit()以避免使⽤半主机模式void _sys_exit(int x){x = x;}//重定义fputc函数int fputc(int ch, FILE *f){while((USART1->SR&0X40)==0);//循环发送,直到发送完毕USART1->DR = (u8) ch;return ch;}#endif实验现象从电脑串⼝助⼿发送长度为200以内任意长度的字符串给STM32串⼝1(字符串以回车换⾏标识结束),STM32接收到字符串之后,⼀次性通过串⼝1把所有数据返回给电脑。
实现过程把每个接收到的数据保存在⼀个程序定义的Buffer数组中(数组长度为200),同时把接收到的数据个数保存在定义的变量中。
stm32单片机开关代码
stm32单片机开关代码针对STM32单片机的开关控制代码,可以通过GPIO(通用输入/输出)模块来实现。
以下是一个简单的示例代码,用于控制单片机上的一个开关:c.#include "stm32f4xx.h"#define SWITCH_PIN GPIO_PIN_0。
#define SWITCH_PORT GPIOA.int main(void)。
{。
// 初始化时钟。
RCC->AHB1ENR |= RCC_AHB1ENR_GPIOAEN;// 配置GPIOA的PIN0为输入。
SWITCH_PORT->MODER &= ~(GPIO_MODER_MODE0); while (1)。
{。
// 读取开关状态。
if (SWITCH_PORT->IDR & SWITCH_PIN)。
{。
// 开关处于打开状态。
// 执行相应操作。
}。
else.{。
// 开关处于关闭状态。
// 执行相应操作。
}。
}。
}。
在这个示例代码中,我们首先包含了STM32F4系列的头文件,然后定义了开关所连接的引脚和端口。
在主函数中,我们启用了GPIOA的时钟,并将其PIN0配置为输入。
然后在一个无限循环中,我们不断地读取开关的状态,根据开关状态执行相应的操作。
需要注意的是,以上代码是一个简单的示例,实际的应用中可能需要考虑消抖、中断处理等更多的细节。
另外,具体的代码可能会因为使用的STM32型号和开发环境的不同而有所差异,需要根据具体情况进行调整。
希望以上信息能够帮助到你。
如果你需要更详细的代码或者其他方面的帮助,请随时告诉我。
stm32串口调参数
stm32串口调参数串口调参数是指在使用STM32单片机进行串口通信时,需要通过设置一系列参数来控制串口的工作方式。
下面将详细介绍调整这些参数的方法:1. 总线速率(Baud Rate):通过修改USART_CR1寄存器的USART_CR1_BR位来设置串口的波特率。
BR通常是一个由APB1总线频率和所需波特率计算得出的值。
例如,如果APB1总线频率为72MHz,希望设置波特率为9600,那么BR的计算公式为:BR=APB1总线频率/所需波特率BR=72MHz/9600=7500通过设置USART_BRR寄存器的USART_BRR_DIV位为BR来实现调整。
2. 数据位长度(Data Bits):STM32单片机的USART_CR1寄存器的USART_CR1_M位用于设置数据位长度。
有两个选项可供选择:8位和9位。
3. 校验位(Parity Bits):STM32单片机的USART_CR1寄存器的USART_CR1_PCE位用于启用或禁用校验位。
如果启用校验位,还需要根据实际情况选择奇校验还是偶校验。
4. 停止位长度(Stop Bits):STM32单片机的USART_CR2寄存器的USART_CR2_STOP位用于设置停止位长度。
有两个选项可供选择:1位和2位。
5. 硬件流控制(Hardware Flow Control):如果需要使用硬件流控制,可以设置STM32单片机的USART_CR3寄存器的USART_CR3_RTSE、USART_CR3_CTSE和USART_CR3_CTSIE位。
6.中断控制:STM32单片机的USART_CR1寄存器的USART_CR1_TXEIE和USART_CR1_RXNEIE位可用于使能或禁用发送和接收中断。
7.DMA控制:STM32单片机的USART_CR3寄存器的USART_CR3_DMAT和USART_CR3_DMAR位可用于使能或禁用DMA传输。
调整这些参数的步骤如下:1.初始化串口:配置引脚,设置GPIO模式为复用模式,选择对应的复用功能映射,然后初始化USART控制器。
STM32 不断进入串口中断问题 解决方法
STM32 不断进入串口中断问题解决方法STM32 有时候会不断进入中断,解决方法如下1.串口初始化配置时,需要打开ORE 溢出中断,如下红色代码所示 [cpp] view plain copy1.void Usart_Init(void)2.{3.4.5. GPIO_InitTypeDef GPIO_InitStructure;6. NVIC_InitTypeDef NVIC_InitStructure;7. USART_InitTypeDef USART_InitStructure;8.9. RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 开启串口时钟10.11. GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1);12. GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_1);13.14. GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;15. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;16. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;17. GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;18. GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;19. GPIO_Init(GPIOA,&GPIO_InitStructure);20.21.22.23. USART_ART_BaudRate = 57600; // 配置波特率为11520024. USART_ART_StopBits = USART_WordLength_8b; // 配置数据长度为825. USART_ART_StopBits = USART_StopBits_1; //设置停止位26. USART_ART_Parity = USART_Parity_No; // 配置奇偶校验为NONE27. USART_ART_HardwareFlowControl = USART_HardwareFlowControl_None; // 配置硬件流为NONE 28. USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 打开Rx接收和Tx发送功能29.30. USART_Init(USART1,&USART_InitStructure); // 配置31.32.33. USART_Cmd(USART1,ENABLE);34.35. NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; // 选择中断通道36. NVIC_InitStructure.NVIC_IRQChannelPriority = 2; // 抢断优先137. NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断38.39. NVIC_Init(&NVIC_InitStructure);40.41.<span style="color:#ff0000;"> USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 打开中断42. USART_ITConfig(USART1, USART_IT_ORE, ENABLE);</span> // 打开中断43.44.45.}2.在中断中,检测溢出中断并作处理,代码如下所示[cpp] view plain copy1.void USART1_IRQHandler(void)2.{3. u8 dat;4.5.<span style="color:#ff0000;"> if (USART_GetITStatus(USART1, USART_IT_ORE) == SET)6. {7. USART_ClearITPendingBit(USART1,USART_IT_ORE);8. USART_ReceiveData( USART1 );9.10. }</span>11.if( USART_GetITStatus(USART1,USART_IT_RXNE) != RESET ) // 等价于if( !RI ) 检查串口数据是否已就位12. {13. USART_ClearITPendingBit(USART1,USART_IT_RXNE);14. dat = USART_ReceiveData( USART1 );15. uart_rec_buf[uart_len++]=dat;16. RX_TIM=UART_INIT_TIM;17.18. }19.20.}这样就可以解决,串口不断进入中断的问题。
STM32实例代码
- 函数属性:外部,使用户使用
- 参数说明:inf:指向提示信息字符串的指针
dat:一个数值,前面的提示信息就是在说明这个数值的意义
- 返回说明:无
****************源自*********************************************************/
- 隶属模块:STM32串口操作
- 函数属性:外部,使用户使用
- 参数说明:mydata待发送的数据
- 返回说明:无
- 函数实现步骤:
(1)清除串口的发送完成标志位
(2)利用库函数 USART_SendData发送数据mydata
2、usart.c文件
#include "usart.h"
#include "stm32f10x_lib.h"
#include "string.h "
#include "myfun.h"
/***************************************************************************
void USART_Output_Information(char *inf,ulong dat);
//UART-------------------------------------
#endif
这里是USART的头文件,包含了USART操作的所有函数,这些函数包括USART的配置初始化、发送字节、发送字符串、发送回车、发送位长数据、发送调试信息等
- 功能描述:STM32f103串口的初始化
STM32串口之空闲中断
STM32串⼝之空闲中断NBiot模块⼀般都是串⼝接⼝,使⽤AT指令集,对接中国移动onenet平台。
先⽤串⼝助⼿去测试,流程测试OK之后需要在MCU上重新写⼀遍。
STM32串⼝ IDLE中断IDLE其实是空闲的意思。
IDLE中断叫空闲中断,不叫帧中断。
那么什么叫空闲,怎么定义空闲呢?在实际发送数据的时候,⽐如⼀串字符串,我们会采⽤如下⽅式发送void uart1_putc(char dat){SBUF = dat;while (!TI);TI = 0;}void uart1_puts_n(char *str){while (*str)uart1_putc(*str++);}void uart1_puts_n("i am handsome");其实发送的两个字符之间间隔⾮常短,所以在两个字符之间不叫空闲。
空闲的定义是总线上在⼀个字节的时间内没有再接收到数据,空闲中断是检测到有数据被接收后,总线上在⼀个字节的时间内没有再接收到数据的时候发⽣的。
⽽总线在什么情况时,会有⼀个字节时间内没有接收到数据呢?⼀般就只有⼀个数据帧发送完成的情况,所以串⼝的空闲中断也叫帧中断。
要怎么开启帧中断呢?其实其他串⼝配置不⽤改变,只需要在开启串⼝接收中断的时候加上⼀句话就Ok。
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串⼝接收中断USART_ITConfig(USART2, USART_IT_IDLE, ENABLE);//开启串⼝空闲中断然后中断函数如下void USART2_IRQHandler(void){ //串⼝1中断服务程序int clear;if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){ //字符接收中断(接收到的数据必须是0x0d 0x0a结尾)USART2_RX_BUF[length++] = USART2->DR & 0x0FF;}else if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET){//空闲帧中断if(USART2_RX_BUF[length - 1] == 0xff){clear = USART2->DR;clear = USART2->SR;length = clear;length = 0;USART2_RX_STA = 1;}else{;}}}在普通中断的时候仅仅保存数据,在帧中断的时候需要执⾏相应处理函数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32 无中断串口代码2010-05-14 16:09串口,是我们日常使用最多的一部分,刚开始做电子工程师的,基本都是从这个开始的,下面的代码是我使用STM32库编写的串口输出和读取的代码。
1、串口初始化函数:void USART_Ini(USART_TypeDef* USARTx,u16 buad)2、串口中断开启和关闭:USART_IT(USART_TypeDef* USARTx,FunctionalState NewState)3、串口接收:u16 Getch(USART_TypeDef* USARTx)4、串口单个字符输出:void Putch(USART_TypeDef* USARTx,u16 ch)5、串口输出字符串:void PutStr(USART_TypeDef* USARTx,u16 *SendBuf,u16 Length)#include "stm32f10x_lib.h"u16 RecDateBuffer[100];u16 RecLen;u8 SendDateBuffer[100];/************************************************************* ******************* Function Name : Uart_Ini* Description : 串口初始化* Input :* Output : None* Return :************************************************************** *****************/void USART_Ini(USART_TypeDef* USARTx,u16 buad){USART_InitTypeDef USART_InitStructure;USART_ClockInitTypeDef USART_ClockIni;GPIO_InitTypeDef GPIO_InitStructure;/* Configure USART1 Tx (PA.09) as alternate function push-pull */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOD, &GPIO_InitStructure);/* Configure USART1 Rx (PA.10) as input floating */GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOD, &GPIO_InitStructure);USART_ART_BaudRate = 9600; //串口波特率USART_ART_WordLength = USART_WordLength_8b; //串口数据长度USART_ART_StopBits = USART_StopBits_1; //串口停止位USART_ART_Parity = USART_Parity_No; //串口奇偶效验位USART_ART_Mode = USART_Mode_Rx|USART_Mode_Tx; //串口模式,开始起发送和接收USART_ART_HardwareFlowControl =USART_HardwareFlowControl_None; //串口硬件流USART_ART_Clock = USART_Clock_Disable;USART_ART_CPOL = USART_CPOL_Low;USART_ART_CPHA = USART_CPHA_2Edge;USART_ART_LastBit = USART_LastBit_Disable;USART_Init(USARTx,&USART_InitStructure);USART_ClockInit(USARTx,&USART_ClockIni);/* Enable USART1 */USART_Cmd(USARTx, ENABLE); //开启串口X}/************************************************************* ******************* Function Name : Getch* Description : 串口中断开启或关闭* Input : USARTx:x=串口号NewState:ENABLE开启中断,DISABLE关闭中断* Output : None* Return :************************************************************** *****************/void USART_IT(USART_TypeDef* USARTx,FunctionalState NewState){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQChannel;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 5;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);if(NewState==ENABLE){USART_ITConfig(USARTx,USART_IT_RXNE | USART_IT_TXE,ENABLE);}else{USART_ITConfig(USARTx,USART_IT_RXNE | USART_IT_TXE,DISABLE);}}/************************************************************* ******************* Function Name : Getch* Description : 串口接收字符* Input : USARTx:x=串口号* Output : None* Return :************************************************************** *****************/u16 Getch(USART_TypeDef* USARTx){u16 ch;if (USART_GetFlagStatus(USARTx,USART_FLAG_RXNE)==SET){ch=USART_ReceiveData(USARTx);//return(ch);}return(ch);}/************************************************************* ******************* Function Name : GetStr* Description : 接收字符串* Input : USARTx:x=串口号buffer:接收字符串数组* Output : None* Return :************************************************************** *****************/void GetStr(USART_TypeDef* USARTx){//u16 i;while(USART_GetFlagStatus(USARTx,USART_FLAG_RXNE)==SET){if(USART_GetFlagStatus(USARTx,USART_FLAG_ORE)==RESET){if(RecLen<100){RecDateBuffer[RecLen]=USART_ReceiveData(USARTx);RecLen++;}}}}/************************************************************* ******************* Function Name : Putch* Description : 串口输出一个字符* Input : USARTx:x=串口号ch:串口输出的字符* Output : None* Return :************************************************************** *****************/void Putch(USART_TypeDef* USARTx,u16 ch){if(USART_GetFlagStatus(USARTx,USART_FLAG_TXE)==SET){USART_SendData(USARTx,ch);}}/************************************************************* ******************* Function Name : PutStr* Description : 串口输出字符串* Input : USARTx:x=串口号SendBuf:串口输出字符串Length:输出长度* Output : None* Return :************************************************************** *****************/void PutStr(USART_TypeDef* USARTx,u16 *SendBuf,u16 Length){u16 i;for(i=0;i<Length;i++){Putch(USARTx,SendBuf[i]);}}。