干涉型测距的相关问题
白光干涉测距原理 -回复
白光干涉测距原理-回复【白光干涉测距原理】是一种用于测量物体距离的方法,利用光的干涉现象来实现精确测距。
本文将分步骤回答关于白光干涉测距原理的问题,帮助读者深入了解这一测量技术。
第一步:什么是干涉?干涉是光学的基本现象之一,它源于光的波动性。
当两束或多束光线重叠在一起时,它们会相互干涉。
干涉可以分为构成性干涉和破坏性干涉两种形式。
构成性干涉时,光线波峰与波峰叠加,形成亮区;波谷与波谷叠加,形成暗区。
而破坏性干涉时,则相反。
第二步:为什么使用白光进行干涉测距?在干涉测距中,使用白光的主要原因是白光包含了多个波长的光束。
根据干涉的原理,不同波长的光线在相遇处会产生不同的干涉现象。
通过分析干涉条纹,可以推断出物体距离的变化。
使用白光进行干涉测距可以在一次测量中得到更准确的结果,因为它利用了多个波长的信息。
第三步:白光干涉测距的基本原理是什么?白光干涉测距的基本原理是利用干涉仪测量物体表面的微小高度差。
干涉仪由光源、分束器、反射镜、反射面以及接收器组成。
白光通过分束器被分成两束光,一束经过反射镜反射后射入参考光束,另一束则射向物体表面。
被物体表面反射的光线也会进入干涉仪,与参考光束相叠加形成干涉条纹。
根据干涉条纹的变化,可以计算出物体表面的高度差。
第四步:如何获得干涉条纹?获得干涉条纹的过程可以通过以下步骤来实现:1. 将白光分成两束光线,一束作为参考光线,另一束射向物体表面。
2. 被物体表面反射并重新聚焦的光线与参考光线叠加,形成干涉现象。
3. 将干涉光束通过一个接收器,并记录下干涉条纹的变化。
第五步:如何利用干涉条纹测量物体表面的高度差?通过分析干涉条纹的变化,可以计算出物体表面的高度差。
干涉条纹的间距与物体表面的高度差成正比,因此可以通过测量干涉条纹的间距来得到物体表面的高度变化。
第六步:干涉测距的应用领域有哪些?白光干涉测距技术广泛应用于工业测量领域。
例如,在制造工艺中,可以利用干涉测距技术来测量和控制物体的尺寸和形状。
迈克尔逊干涉仪定域干涉实验中的几个问题

迈克尔逊干涉仪定域干涉实验中的几个问题迈克尔逊干涉仪是一种测量光波长的实验仪器。
这个实验仪器可以通过测量前后光程差来精确地测量光的波长。
但是,在干涉实验中还涉及到一些问题,下面就为大家详细介绍。
步骤一:测量系统的定标在进行任何一项实验之前,必须测量实验仪器的定标,以确定它的精确性。
对于干涉仪而言,需要测量干涉条纹的间距。
在定标过程中,需要进行以下操作:使用光源,比如激光或白炽灯泡,通过透镜将光束引导到干涉仪上,然后移动干涉仪的反射面。
每次移动反射面,都会产生一个新的条纹,我们需要测量每个条纹之间的距离。
步骤二:准备好干涉仪在进行干涉实验之前,需要准备一个干涉仪。
干涉仪由两个反射镜组成,两个反射镜之间是真空空间。
确保反射面是平行的,并且任何镜子上都没有气泡或其他障碍物。
同时,需要保持光源和干涉仪之间的距离适当。
步骤三:进行干涉实验一旦干涉仪被正确设置,就可以进行干涉实验。
在进行实验时,需要使用一个相干光源,例如激光。
将前面的光源接到干涉仪上,并将观察器调整到干涉条纹的位置。
然后,移动一个反射镜,从而改变光路的长度,观察干涉条纹的位置变化。
步骤四:分析结果在干涉实验中,观察到干涉条纹的变形与相邻波峰或波谷的位置有关。
通过测量这些位置,并使用它们计算光波长、光速等参数,来分析干涉实验的结果。
步骤五:控制误差在实验中,需要控制误差。
干涉实验可能会受到各种误差的影响,如环境中的震动或温度变化。
为了得到精确的结果,必须控制这些误差并使用正确的方法来校正它们。
总之,迈克尔逊干涉仪是一种常用于测量光波长的实验仪器。
正确的定标、准备、实验、分析和误差控制步骤是确保测量结果精确的关键。
在实验过程中请注意安全,保障设备的完好性。
光干涉测量几何长度的不确定度研究
光干涉测量几何长度的不确定度研究摘要:不确定度是计量学中的一个非常重要的概念,它的定义是用来表征合理地赋予被测量之值的分散性,与测得值相联系的参数。
我们都知道,测量必然存在误差,因此就不难理解不确定度是用来表示所给出的测得值的可靠程度,是体现测得值水平的一个重要指标。
同一个参量,实验室所给出的不确定度越小,表明测得值越接近真值,实验室的测量水平和质量越高。
随着科学技术的进步,测量水平越来越高,市场上出现的测量仪器也越来越精密,对测量的要求也越来越高,促使计量工作者对不确定度的理解和应用不得不加以重视。
关键词:光干涉测量;几何长度;不确定度引言因为激光具备高度单色性、高强度以及及高方向性等优势,所以在当前市场中推广的多类激光干涉仪可以与反射镜、折射镜等积极配合来测量平行度、垂直度以及速度等信息,既属于精度测量工具,又属于测量仪器的校正仪器。
1激光干涉仪的基本原理激光干涉仪实际工作的过程,激光器发出的激光通过分光镜形成两束光,一束直接照射到固定反射镜上出现参考光束,一束直接射到移动反射镜中产生测量光束,随后通过分光镜汇合后干涉。
若两束光相位相反,出现暗条纹;若相位相同则出现明条纹。
测量光路长度出现改变后,干涉光束的相对相位出现改变,将反射镜每移动一个波长的距离即会产生一个明–暗–明的光强度循环,依靠公式进行计算能够准确测量移动,从而了解机床的位置精度。
对数控机床直线运动精度进行检测的过程中,把移动反射镜固定于机床导轨上并和导轨同时运动,对回转运动精度进行检测的过程中,角度反射镜相对角度干涉镜的旋转会导致两束光的光程出现变化,从而计算得到被测角度值。
具体的检测步骤如下:(1)对激光器系统进行设置以做好线性测量准备;(2)确保激光束和机床的运动轴保持准直;(3)启动自动环境补偿功能同时保证在软件中输入准确的材料膨胀系数;(4)对机床线性误差实施测量和记录;(5)对采集的数据信息实施综合分析。
2 单双频激光干涉仪的概述2.1单双频激光干涉仪经过激光器发射出来的光束,在扩束准直以后,将会从分光镜处变成两路,而后会根据固定与可动的反射镜回到分光镜中,并由此得到干涉条纹。
激光干涉法测距原理

激光干涉法测距原理
图片:
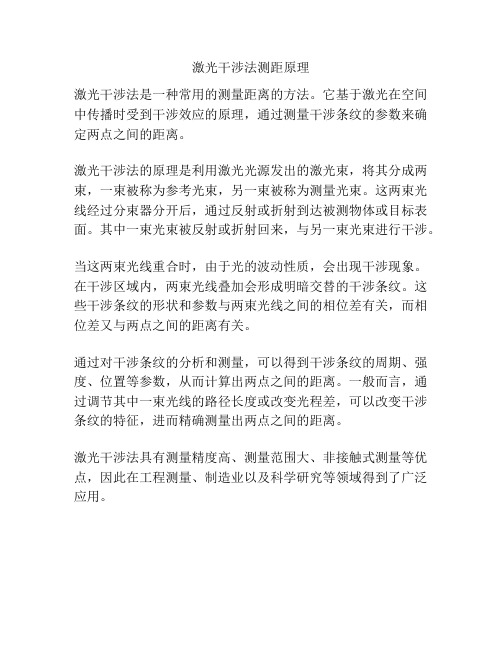
根据光的干涉原理,两列具有固定相位差,而且有相同频率、相同的振动方向或振动方向之间夹角很小的光相互交叠,将会产生干涉现象,如图所示。
由激光器发射的激光经分光镜A分成反射光束S1和透射光束S2。
两光束分别由固定反射镜M1和可动反射镜M2反射回来,两者在分光镜处汇合成相干光束。
若两列光S1和S2的路程差为Nλ(λ为波长,N为零或正整数),实际合成光的振幅是两个分振幅之和,光强最大。
当S1和S2的路程差为λ/2(或半波长的奇数倍)时,合成光的振幅和为零,此时光强最小。
激光干涉仪就是利用这一原理使激光束产生明暗相间的干涉条纹,由光电转换元件接收并转换为电信号,经处理后由计数器计数,从而实现对位移量的检测。
由于激光的波长极短,特别是激光的单色性好,其波长值很准确。
所以利用干涉法测距的分辨率至少为λ/2,利用现代电子技术还可测定0.01个光干涉条纹。
因此,用激光干涉法测距的精度极高。
激光干涉仪由激光管、稳频器、光学干涉部分、光电接受元件、计数器和数字显示器组成。
目前应用较多的有双频激光干涉仪。
激光干涉仪测量距离和表面精度

激光干涉仪测量距离和表面精度激光干涉仪是一种常用的精密测量仪器,可用于测量距离和表面精度。
通过利用光波的干涉现象,激光干涉仪能够实现高精度的测量。
本文将介绍激光干涉仪的原理、测量距离和表面精度的方法,以及激光干涉仪在不同领域中的应用。
激光干涉仪是基于光波的干涉现象进行测量的仪器。
光波的干涉是指两束或多束光波相遇时发生的波的叠加现象。
激光干涉仪通过将激光分成两束,一束作为参考光束,一束照射到待测物体上反射回来作为待测光束,再将两束光波进行干涉,通过测量干涉条纹的变化来获得距离和表面精度的信息。
激光干涉仪的测量距离的原理基于光波的干涉,利用干涉条纹的变化来获得物体到仪器的距离。
当两束光波相遇时,它们会发生干涉,干涉条纹的间距和形态会随着物体到仪器的距离的变化而改变。
通过测量干涉条纹的形态和间距的变化,激光干涉仪可以计算出物体到仪器的距离。
这种测量方法具有高精度和高分辨率的特点,适用于微小距离的测量。
激光干涉仪的测量表面精度的方法基于光波的干涉,利用干涉条纹的形态和间距来获得表面精度的信息。
当光波照射到物体表面时,由于表面的形态和光的反射特性的影响,干涉条纹的形态和间距会发生变化。
通过测量干涉条纹的形态和间距的变化,激光干涉仪可以计算出物体表面的精度。
这种测量方法具有高精度和高分辨率的特点,适用于表面平整度和粗糙度的测量。
激光干涉仪广泛应用于多个领域,如制造业、科学研究和地质勘探等。
在制造业中,激光干涉仪可用于检测零件的尺寸和形状,以及测量零件表面的精度。
在科学研究中,激光干涉仪可用于研究光学现象、材料的性质和微小物体的运动。
在地质勘探中,激光干涉仪可用于测量地表的高程和形态,以及探测地下的岩层和地下水位。
总结一下,激光干涉仪是一种常用的精密测量仪器,可用于测量距离和表面精度。
通过利用光波的干涉现象,激光干涉仪能够实现高精度的测量。
通过测量干涉条纹的形态和间距的变化,激光干涉仪可以计算出物体到仪器的距离和物体表面的精度。
迈克尔逊干涉仪在实验中常见问题及其解决方案

(
故障及解决方案
问题 1 转动微动手轮时干涉图样会上下移动 % 原因及解决方法 ) 当导轨是光滑平整的时候 ’ 上述问题产生的原因是由于分光板 "& 不垂 直于水平面造成的 % 当分光板 "& 不垂直水平面时 ’ 光线 * & + 将不平行于水平面 ’ !& 移动时 ’ 光线 * & + 和光线 * # + 在分光板上的光斑间距将发生变化使得干涉图样会上下移动 % 解决方法 如图 ( 所示 ’ 首先卸掉平面反射镜 !& ’ 然后用两束处于同一水平面的互相垂直的激光束入射 分光板 "&% 其中光束 * # + 是透过分光板的 ’ 它的光斑只会发生一些横向移动 , 而光束 * & + 是在 半反半透膜上发生反射的 ’ 若分光板 "& 有微小的角度变化 ’ 则它的光斑将有非常大的位移 % 通过调节分光板上的 # 和 $ 两个螺钉 ’ 使得当光束 * & + 和光束 * # + 的光斑处于同一水平面 ’ 再调节分光板上的螺钉 % 使得光束 * & + 和光束 * # + 的光斑重合 ’ 分光板 "& 就垂直水平面了 % 且 光束 * & + 和分光板 "& 夹角精确为 -./%
图 . 问题 # 的解决示意图
原因及解决方法 ) 出现这种情况一般都是由于传动系统的问题 ’ 若是读数窗口中的读 数无变化 ’ 则是因为微动手轮已经无效 ’ 这时只需要将微动手轮上的锁紧螺钉锁紧即可 % 若 是读数窗口中的读数有变化 ’ 而干涉圆环无 “ 涌出 ” 或“ 陷入 ” ’ 则是因为粗动手轮的锁紧螺钉 需要锁紧 % 问题 4 读数系统不准确 原因及解决方法 ) 迈克尔逊干涉仪的读数系统由三部分构成 ’ 主尺读数 ’ 读数窗口读数 ’ 微动手轮读数 % 当 !& 的滑块上的读数刻线和主尺的某一条刻线重合时 ’ 读数窗口读数应为
干涉式测向方法的误差的产生分析及消除
⼲涉式测向⽅法的误差的产⽣分析及消除2019-04-26摘要:⼲涉式测向⽅法简介,从测向原理、造成误差的原因多⽅⾯进⾏了深⼊剖析,对于⼲涉式测向产⽣的误差问题,采⽤天线转换连接、增加校正参数的⽅法,验证后获得较好的结果,能够在⼯程实现上解决测向存在的误差。
关键词:⼲涉式测向;伪距测量;基线测量;误差消除⼲涉式测向作为⼀种精确的⽆线电测向⽅法,⼴泛应⽤在军事、科研领域。
利⽤统⼀发射源发射信号,到接收终端统⼀天线阵中两根接收天线的时间差,和这两根天线之间的间距,通过三⾓公式求解,进⽽得到相对⾓,实现相对定位。
1 ⼲涉式测向原理⼲涉式测向原理图如图1所⽰,设两天线的间距为d,以天线连线⽅向为⽅位基准。
当被测⽬标发射源远离测向系统时(天线R0远⼤于d),及发射源到两个测向天线传播⽅向近似于平⾏,两个测向天线接收的⽬标回波路径差ΔR与⽅向⾓θ、基线长度d的关系为ΔR=R2—R1=d sin θ(1)sin θ=■θ=arcsin■式中:ΔR—⽬标回波分别到达两天线的距离差;R2—⽬标到测向天线2的距离;R1—⽬标到测向天线1的距离。
则θ值可以得出,θ即为两根测向天线连线垂线与⽬标点之间夹⾓。
⼲涉式测向原理是依靠测量⽬标到两测向天线的路径差ΔR,达到测量⽬标⽅向⾓的⽬的。
2 ⼲涉式测向的误差分析⼲涉式测向根据原理分析可能引起测向误差的原因有如下⼏点:(1)伪距测量误差⼲涉式测向的根本在于准确测量⽬标点到两根测向天线的路径差ΔR,及准确测量两根天线接收到的⽬标点发射信号的时间差Δt,根据下式:ΔR=cΔt(c为⽆线电波在空⽓中的传播速度,近似为3×105 km/s);在接收机中以测向天线1所接收到的信号时刻t1计算,接收机时钟在t时刻产⽣⼀个相同的编码测距信号,这个复现的码在时间上移动,⼀直到与测向天线2收到的测距码产⽣相关为⽌,则两根测向天线接收到的测距码和接收机产⽣的复现码相关过程的时间差即为Δt。
激光干涉法测距原理
激光干涉法测距原理
激光干涉法是一种常用的测量距离的方法。
它基于激光在空间中传播时受到干涉效应的原理,通过测量干涉条纹的参数来确定两点之间的距离。
激光干涉法的原理是利用激光光源发出的激光束,将其分成两束,一束被称为参考光束,另一束被称为测量光束。
这两束光线经过分束器分开后,通过反射或折射到达被测物体或目标表面。
其中一束光束被反射或折射回来,与另一束光束进行干涉。
当这两束光线重合时,由于光的波动性质,会出现干涉现象。
在干涉区域内,两束光线叠加会形成明暗交替的干涉条纹。
这些干涉条纹的形状和参数与两束光线之间的相位差有关,而相位差又与两点之间的距离有关。
通过对干涉条纹的分析和测量,可以得到干涉条纹的周期、强度、位置等参数,从而计算出两点之间的距离。
一般而言,通过调节其中一束光线的路径长度或改变光程差,可以改变干涉条纹的特征,进而精确测量出两点之间的距离。
激光干涉法具有测量精度高、测量范围大、非接触式测量等优点,因此在工程测量、制造业以及科学研究等领域得到了广泛应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
同 InSAR 成像原理当我们知道一些特定的参数(θ ,α ,B,Η )当 S1 和 S2 两个探测器位置确定后我们很容易知道参数θ ,α ,B,对 于参数 H 我们可能需要一个位移传感器来获得, 这样我们就可以测量 出 A、B 之间的距离信息(因为这里 h 是 r1 的函数,所以如果知道 r1 我们可以测出 A、B 之间的绝对距离,不知道 r1 我们也可以知道 A、B 之间的相对距离,这对于某些特定条件下的应用也是满足要求的,比 如说三维成像)
干涉测距等相关问题
一、 干涉的基本条件 光的干涉、 衍射等波动现象的理论基础是波的叠加原理和独立传 播原理。 在真空中, 当从光源 A 和 B 发出的两列波在同一区域传播时, 它们之间互不干扰,都按各自的规律独立进行,完全不受另一列波的 影响,这就是波的独立传播原理。但在各种媒介中,则只有波的扰动 比较小时,波的独立传播定律才能成立。当光波在媒介中传播时,必 然引起空间各点的扰动,则在它们叠加的空间区域内,每一点的扰动 将等于各个分量波单独存在时该点扰动之和,这就是波的叠加原理。 对于两列单色平面波 E1 E2
Figure 7:Photograph of the SwissRanger4000 camera.
总结
综上所述, 实际上对于直接利用干涉来测量长度信息肯定是可行 的,而且因为光学器件的精度要求比较高,测量的精度也很高。但是 如果想通过相机拍照获得干涉图谱来分析得出空间物体的位置信息, 会涉及很多问题,比如相干光源的选取、相机位置的定标、发射接收 装置等,可行性还有待论证。 (TOF 相机会是一个很好的借鉴)但是 如果利用 InSAR 的原理概念, 从原理方法上更简单可能也会更容易实 现。对于双目立体 CCD 相机,实际上已有比较成功的运用(我国的嫦 娥一、二号卫星)[4]。
点只要能在右相机面上找到相应的匹配点, 就可以确定出该点三维坐 标。 四、干涉合成孔径雷达(InSAR) InSAR 的概念由 L.C.Graham 于 1974 年首次提出。InSAR 技术是 一门根据复雷达图像的相位数据来提取地面目标三维空间信息的技 术,其基本思想是:利用两副天线同时成像或一副天线相隔一定时间 重复成像,获取同一区域的复雷达图像对,由于两副天线与地面某一 目标之间的距离不等, 使得在复雷达图像对同名像点之间产生相位差, 形成干涉纹图, 根据两次成像相位差与地面目标的三维空间位置之间 存在的几何关系,利用飞行轨道的参数,即可测定地面目标的三维坐 标,其成像几何示意图如 Figure5.图中 A1 和 A2 分别代表两个天线, r1 和 r2 分别代表两幅天线到 P 点得路径长度。α 是基线 B 与高度 Z 方向的夹角, B 同时表示基线的长度, H 为飞行平台的轨道高度, α 、 B 和 H 假设都为已知量(可有卫星轨道参数得到) 。天线波束中心的
1
=ω1 cbFigure 2:透镜成像模型 通过简单的几何变换,即可得出: 1 1 1 = + f a b 式中 f 为透镜的焦距,a,b 分别为物距和像距。当 a≫b 时,f≈b; 可认为像面与焦面重合, 此时可以用针孔成像模型近似代替透镜成像
模型来描述空间三维物点变换为二维像点的基本关系。Figure3 即为 空间任何一点 P 在图像中的成像关系模型, 可得出他们之间的比列关 系:
Xc Zc
,Xright = f
X c −B Zc
,Y = f
yc Zc
Figure 4:双目立体成像原理示意图 记视差D = Xleft − Xright 。则可算出空间点 P 在相机坐标系下的三维 坐标为xc =
B.X left D
, yc =
B.Y D
, Zc =
B.f D
,因此,左相机面上的任意一
入射角为θ ,地面目标横向坐标为 y。h(y)为随地面距离 y 而变的目 标高度,为待求量。P 点在两幅 SAR 复图像中的相位分别为 ∅1 = ∅2 =
2π r 1 λ 2π r 2 λ
(1) (2)
式中λ 为雷达信号的波长,由(1) (2)两式可知相位差ϕ为 ϕ = ϕ1 − ϕ2 =
2π λ
Reference 1. R. Lange and P. Seitz, “Solid-State Time-of-Flight Range Camera”, IEEE J. Quantum Electronics 2. Thierry Oggier*, Bernhard Bü ttgen, Felix Lustenberger ,SwissRanger SR3000 and First Experiences based on Miniaturized 3D-TOF Cameras 3. http:\\www.swissranger.ch 4. 赵葆常 杨建峰 汶德胜 高 伟 阮 萍 贺应红,嫦娥一号卫星 CCD 立体相机的设计与在轨运行, 中国科学院西安光学精密机械 研究所,西安
A h r2 S2 B α S1 θ H B
r1
0
Figure 6:干涉测距原理示意图 五、Time of Flight Cameras Time of flight(TOF) 相机根据相位测量的原理,首先它发射一 个经过调制的近红外光波, 光波被物体反射并通过光学镜头成像在专 用的 3D 探测器上。根据物体目标的距离,获取的信号和发射的原信 号有相位的延迟, 通过测量相位的延迟就可以获取物体目标的深度信 息。[1,2] 具 体 的 产 品 有 SwissRanger3000 、 SwissRangerSR4000
ω2 BS A R1 R2 B ω1
ω2
ω1
Figure 1:外差干涉法测量长度的示意图 A、B 是待测物体上的两个平行的反射面,待测量的是这两个面 的间距 d。圆频率为ω 1 的简谐平面波经分束镜 BS 反射后,正入射到 A、B 面上,再次反射后变为位相差为 2κ 1 d 的上下两束波(记为 A 波和 B 波,B 波比 A 波位相滞后)向右射出。如果以 A 面作为基准, 那么 B 面的位置信息(即间距 d 的信息)已隐含与 B 波之中。另一束 圆频率为ω 2 的简谐平面波,即参考波,经 BS 反射后也向右射出,并
r ,t r ,t
= E10 cosk1 . r − ω 1 t + φ = E20 cosk 2 . r − ω 2 t + φ
10 20
形成稳定的干涉强度空间分布的条件: 1、 2、 3、 ω1 = ω2 E10 . E20 ≠ 0 φ
20
−φ
10
= 常数
干涉装置的作用大概可以概括为三个方面,即(1)产生两个或 多个相干光波; (2)引入被测对象; (3)改变各相干光波的传播方向 或波形,并使其叠加,产生干涉。实际上大部分的干涉仪为了获得较 好的干涉光波都是把激光作为光源, 通过对干涉条纹的分析来获得实 际的距离信息,因此干涉图谱的对比度、条纹锐度等将直接影响测量 结果。
如果利用干涉法来测量物体的位置信息, 理论上如 Figure1 所示 (其它的光路只要满足干涉条件也是合理的) ,这里当然要取 ω2 = ω1 ,探测器处获得干涉图谱从而来确定物体的位置信息。 二、光学外差干涉法 光学外插干涉法即是利用携带被测信息的时间圆频率为ω 1 的测 试光波E1 和时间圆频率ω 2 = ω 1 + ∆ω 的参考光波E2 叠加, 产生时间 圆频率为∆ω 的拍频波,通过对差频信号的检测来获取被测信息的干 涉测量方法。其光学原理如 Figure1,典型的测试仪器如:双频激光 外差干涉仪
(Figure7) 其中 SwissRangerSR4000 的测量精度为 Standard Field of View
:(43°(h)
x 34°(v)) Wide Field of View:(69°(h) x
56°(v)) Detection Range : 0.1m-10m 具 体 的 信 息 参 见 网 站 [3]http:\\www.swissranger.ch
当然具体的实现过程设计到参数估计、像素配准、图像的预滤波、干 涉相差的提取、相位条纹的降噪等一系列问题。
P Figure 5:InSAR 成像几何关系示意图 通过上述对 InSAR 原理的描述我们很容易可以想到下图 Figure6 的模型,h 为待测量,假设我们采用红外波成像或是白光加干涉滤光 片成像(这样才能保证干涉条件的满足)对应于一个特定的波长λ ,
r1 − r2
(3)
(3)式左边的ϕ可由干涉图纹来获得,再根据三角形的余弦定理有
2 2 r2 = B 2 + r1 + 2. B. r1 . cos θ + α
(4)
若 r1 已知,由(3)式可知 r2 再由(4)式可知θ ,知道了 r2 和θ 就 可以由(5)式求出待求量 h h = H − r1 . cosθ (5)
与 A 波和 B 波叠加,形成两个拍频波,分别被探测器 R1 和 R2 接收。 而ω 2 = ω 1 + ∆ω 其中ω 2 已知∆ω 可测,位相差为 2κ 1 d,κ (c 为光速)由上述可知 A、B 物体的间距可以测出。 三、双目立体成像原理 3.1 三维景物与二维的变换原理 首先我们知道光学中的针孔成像模型,即光学中的中心投影,满 足三点共线的关系,即像点、物点和光心在同一条直线上。但在实际 的工程实践中针孔成像的透光量太小,很难得到清晰的像,所以用光 学透镜模型来获得图像。透镜成像模型如图 Figure2 所示
y Yc
=
f Zc
x Xc
=
f Zc
其中(x,y)为 p 点得图像坐标; (Xc,Yc,Zc)为空间点 P 在相机坐标 系下的坐标,oo,即为 f
Figure 3:针孔成像视觉坐标系 3.2 双目立体视觉三维测量原理 双目立体视觉是基于视差原理, 由三角法原理进行三维信息的获 取,即由两个相机的图像平面和被测物体之间构成一个三角形。已知 两个相机之间的位置关系, 便可以获取两个相机公共视场内物体的三 维尺寸及空间物体特征点得三维坐标。Figure4 所示为简单的平视双 目立体成像原理图,两相机的连线距离为 B,两相机分别获取的图像 坐标为 Pleft = Xleft ,Yleft ,Pright = Xright ,Yright 。假定两相机在 同一平面下,即Yleft = Yright = Y,则由三角几何关系得到 Xleft = f