基于圆形标志点的全自动相机标定方法
基于正方体和圆环点的摄像机线性自标定方法
基于正方体和圆环点的摄像机线性自标定方法作者:禹旺勋王爱菊来源:《商情》2014年第44期【摘要】本文提出了基于圆环点的摄像机自标定方法。
该方法要求摄像机从3个或多个不同的方位摄取正方体的图像。
根据射影几何调和共轭和交比不变的性质,求出3条相交边灭点的坐标,由3组两两垂直得到三组正交灭点,从而线性的求出摄像机的5个内参数。
模拟图像实验表明,该方法原理简单,并有较高的求解精度。
【关键词】自标定,圆环点,正方体,摄影几何【Abstract】The paper proposed a technique for calibrating based on circular points. The approach only requires camera to take 3 or more figures from different orientations. According to conjugate harmonic and cross-ratio invariant properties in projective geometry, the vanishing points on edges are solved. According to orthogonal relationships of diameters can get three groups orthogonal vanishing points. thus intrinsic parameters are solved linearly. Computer real experiment prove the feasibility and the robustness of this approach.【Keywords】camera self-calibration, circular points, cubic, projective geometry1引言摄像机标定是计算机视觉领域从二维图像中提取三维信息所不可缺少的步骤。
基于彩色圆形标记投射的投影仪标定方法

A b s t r a c t n e w m e t h o d i s r o o s e d f o r c a l i b r a t i n t h e r o e c t o r w h i c h a n d a c a m e r a m a k e u o f a t h r e e d i m e n s i o n a l A - p p g p j p , s s t e m u s e d o f s t r u c t u r e d l i h t . F i r s t l t h e c o l o r c i r c u l a r m a r k s e a s t o b e i d e n t i f i e d a r e t o t h e c a l i b r a t i n r e c o v e r r o e c t e d y g y y g y p j , b o a r d, a n d t h e i m a e o f t h e b o a r d i s a c u i r e d b t h e c a m e r a . S e c o n d l t h e f e a t u r e i n f o r m a t i o n o f t h e c o l o r c i r c u l a r m a r k s i s g q y y , , r o e c t o r . T h e n e x t r a c t e d b c o l o r i m a e s e m e n t a t i o n a n d f e a t u r e e x t r a c t i o n w h i c h i s a l i e d t o c a l i b r a t e t h e t h e w o r l d c o - p j y g g p p o r d i n a t e s o f t h e c e n t e r s o f t h e c i r c u l a r m a r k s a r e s o l v e d b u s i n t h e b a c k c a m e r a m o d e l w h i c h h a s b e e n c a l i b r a t e d . r o e c t e d -p y g j , F i n a l l u n d e r t h e o t i c a l r e v e r s i b l e t h e r e a r d e d a s a c a m e r a w i t h b a c k l i h t r o a d i s c a l i b r a t e d a s s a m e a s r i n c i l e r o e c t o r y, p g g p p p j c a l i b r a t i n c a m e r a . T h e r e s u l t s o f t h e e x e r i m e n t s s h o w t h a t t h e m e t h o d w i t h o u t s e c i a l c a l i b r a t i o n e u i m e n t c a n a t t a i n t h e g p p q p , c o n s i d e r a b l e a c c u r a c a s s i m i l a r c a l i b r a t i n m e t h o d s a n d t h u s h a s v a l u e s . r a c t i c a l y g p , , , , r o e c t o r K e Wo r d s c a l i b r a t i o n c o l o r i m a e s e m e n t a t i o n e l l i t i c d e t e c t i o n t h r e e d i m e n s i o n a l r e c o v e r s t r u c t u r e d l i h t p - j g g p y g y C l a s s N u m b e r P 3 9 1. 4 1 T
基于2D圆点阵列的摄像机精确标定
基于2D圆点阵列的摄像机精确标定摘要:针对电脑键盘自动组装生产线研制过程中的摄像机标定问题,提出一种新的摄像机精确标定方法。
该方法选用2D圆点阵列作为靶标,首先在不考虑摄像机镜头畸变的情况下,利用改进的Matlab标定工具箱估计出摄像机参数的初始值;然后考虑摄像机的镜头畸变,利用改进遗传算法实现对摄像机参数的精确求解。
实验结果表明,该方法是有效可行的。
关键词:计算机视觉摄像机标定圆点阵列靶标遗传优化随着计算机技术和工业自动化程度的不断提高,采用图像传感器的视觉技术已被广泛地应用到工业生产过程中。
为从图像传感器获取的二维信息得到与其相对应的三维空间信息,则须确定图像传感器成像的几何模型。
而确定图像传感器的几何模型的过程即是所谓的摄像机标定[1-3]。
目前,摄像机标定大致可分为传统标定法、自标定法和基于主动视觉的标定法等三大类[2]。
这些标定方法采用的数据处理技术可归结为线性变换、非线性优化和混合优化等三种。
其中,混合优化方案兼顾了线性变换的快速性和非线性优化的准确性等优点,是近年来较为成功的摄像机标定技术。
本文基于混合优化思想,选用二维圆阵列作为靶标,提出一种基于改进GA的快速而准确的摄像机标定方法。
该方法既能保证标定的精确性,又具有特征点提取快速、非线性优化过程简便等优点。
1 摄像机模型1.1 理想摄像机模型1.2 考虑非线性畸变的摄像机模型由于光学系统的加工误差和装配误差等因素,因此摄像机成像精度不可能达到理想针孔摄像机模型的成像精度,即空间点在像平面上实际位置与理想成像位置间存在一定的畸变误差。
畸变误差可分为三种:偏心畸变、薄棱镜畸变和径向畸变。
其中,前两种畸变的存在将导致成像时的径向偏差和切向偏差;径向畸变的存在仅导致成像时的径向偏差,且偏差关于光轴对称。
因此,考虑非线性畸变的摄像机模型可表述为:2 参数求解方法本文利用2D圆点阵列作为靶标,首先利用Matlab标定工具箱估计出针孔摄像机模型中的摄像机参数,然后以此为初始值,利用改进GA实现对考虑径向畸变的摄像机参数的优化。
相机模型与标定(十二)--opencv圆形标志点检测算法
相机模型与标定(⼗⼆)--opencv圆形标志点检测算法本来以为圆形检测⽐较简单,实际还是花费我近⼀上午时间,⽹上⼏乎没有相关资料(除了OpenCV官⽹)。
这⾥坐下简单介绍,分享给⼤家。
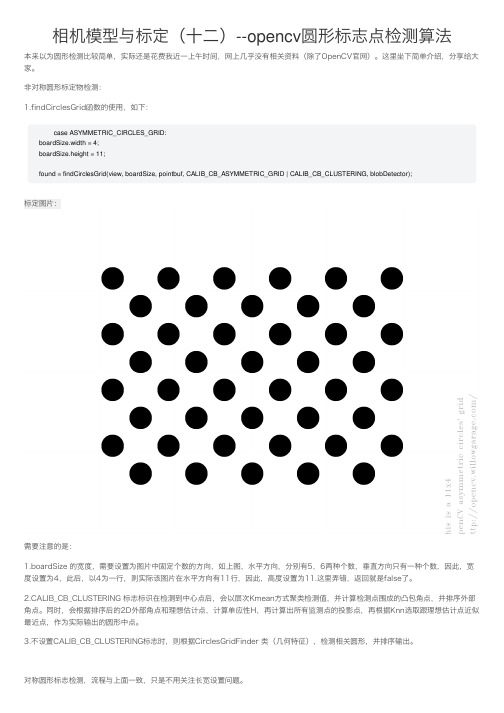
⾮对称圆形标定物检测:1.findCirclesGrid函数的使⽤,如下:case ASYMMETRIC_CIRCLES_GRID:boardSize.width = 4;boardSize.height = 11;found = findCirclesGrid(view, boardSize, pointbuf, CALIB_CB_ASYMMETRIC_GRID | CALIB_CB_CLUSTERING, blobDetector);标定图⽚:需要注意的是:1.boardSize 的宽度,需要设置为图⽚中固定个数的⽅向,如上图,⽔平⽅向,分别有5,6两种个数,垂直⽅向只有⼀种个数,因此,宽度设置为4,此后,以4为⼀⾏,则实际该图⽚在⽔平⽅向有11⾏,因此,⾼度设置为11.这⾥弄错,返回就是false了。
2.CALIB_CB_CLUSTERING 标志标识在检测到中⼼点后,会以层次Kmean⽅式聚类检测值,并计算检测点围成的凸包⾓点,并排序外部⾓点。
同时,会根据排序后的2D外部⾓点和理想估计点,计算单应性H,再计算出所有监测点的投影点,再根据Knn选取跟理想估计点近似最近点,作为实际输出的圆形中点。
3.不设置CALIB_CB_CLUSTERING标志时,则根据CirclesGridFinder 类(⼏何特征),检测相关圆形,并排序输出。
对称圆形标志检测,流程与上⾯⼀致,只是不⽤关注长宽设置问题。
实际上,主要思路在于利⽤简单斑点检测器,检测出圆形后,做后续的相关过滤,排序,确认等操作。
基于2D圆点阵列的摄像机精确标定
基于2D圆点阵列的摄像机精确标定摘要:针对电脑键盘自动组装生产线研制过程中的摄像机标定问题,提出一种新的摄像机精确标定方法。
该方法选用2d圆点阵列作为靶标,首先在不考虑摄像机镜头畸变的情况下,利用改进的matlab标定工具箱估计出摄像机参数的初始值;然后考虑摄像机的镜头畸变,利用改进遗传算法实现对摄像机参数的精确求解。
实验结果表明,该方法是有效可行的。
关键词:计算机视觉摄像机标定圆点阵列靶标遗传优化abstract:aiming at improving performance of the vision system for keyboard assembly,a new accurate camera calibration method is proposed.2d circle array is used to extract feature points for calibration.lens distortion is neglected,and modified camera calibration toolbox for matlab is adopted to compute camera parameters.those parameters are taken as initials,and camera model with lens distortion is resolved by improved geneticalgorithm(ga).consequently,camera parameters with higher accuracy are obtained.experiment results indicate the proposed method is feasible.key words:computer vision;camera calibration;circle array target;genetic optimization随着计算机技术和工业自动化程度的不断提高,采用图像传感器的视觉技术已被广泛地应用到工业生产过程中。
基于2D圆点阵列的摄像机精确标定
基于2D圆点阵列的摄像机精确标定摘要:针对电脑键盘自动组装生产线研制过程中的摄像机标定问题,提出一种新的摄像机精确标定方法。
该方法选用2d圆点阵列作为靶标,首先在不考虑摄像机镜头畸变的情况下,利用改进的matlab标定工具箱估计出摄像机参数的初始值;然后考虑摄像机的镜头畸变,利用改进遗传算法实现对摄像机参数的精确求解。
实验结果表明,该方法是有效可行的。
关键词:计算机视觉摄像机标定圆点阵列靶标遗传优化abstract:aiming at improving performance of the vision system for keyboard assembly,a new accurate camera calibration method is proposed.2d circle array is used to extract feature points for calibration.lens distortion is neglected,and modified camera calibration toolbox for matlab is adopted to compute camera parameters.those parameters are taken as initials,and camera model with lens distortion is resolved by improved geneticalgorithm(ga).consequently,camera parameters with higher accuracy are obtained.experiment results indicate the proposed method is feasible.key words:computer vision;camera calibration;circle array target;genetic optimization随着计算机技术和工业自动化程度的不断提高,采用图像传感器的视觉技术已被广泛地应用到工业生产过程中。
基于圆形特征的摄像机标定
目录1. 课题的研究背景及意义 (1)1.1 课题研究背景 (1)1.2 课题研究意义 (1)2 摄像机标定技术的理论基础 (2)2.1 摄像机模型 (2)2.1.1 线性模型摄像机标定 (2)2.1.2 成像关系推倒 (4)2.1.3 引入畸变的摄像机模型 (5)2.2 摄像机参数模型 (6)3. 摄像机标定技术技术的发展现状 (6)3.1 摄像机标定技术的分类 (6)3.2 摄像机标定技术的国内外现状 (7)3.2.1 传统摄像机标定方法 (7)3.2.2 基于圆形特征的平面模板的摄像机标定 (7)3.3 基于圆形特征的摄像机标定技术存在的问题 (8)4. 研究内容及研究方案 (9)4.1 研究内容 (9)4.2 研究方案及拟采用技术 (9)4.2.1 图像处理 (9)4.2.2 圆心像点坐标的精确定位 (10)4.2.3 椭圆/二次曲线的提取 (10)4.2.4 智能优化算法提高摄像机标定精度 (11)4.4.5 多摄像机的全局标定 (11)5. 课题难点及解决方法 (12)6. 实验条件及论文经费估计 (12)7. 论文工作计划 (12)8. 参考文献 (12)1.2.课题的研究背景及意义本课题为自选课题,即基于圆形特征的摄像机标定技术研究。
1.1 课题研究背景视觉是人类感知环境世界,认识外部世界的主要途径。
据统计人类约有80%信息是通过视觉获得的[1]。
计算机视觉的基本任务之一也是从摄像机获取的图像信息出发计算三维空间中物体的何信息,并由此重建和识别物体。
虽然,目前人们还不能让计算机也具有像生物那样高效、灵活的视觉系统,但这种希望正在逐步实现。
视觉测量技术,是以机器视觉技术为基础,融合电子技术、计算机技术、近景测量技术、图像处理技术为一体的测量系统。
其试图通过对图像对被测目标进行测量,无须基础被测物体本身,这一间接测量的特点,使得视觉测量系统具有受外界条件影响小,信息获取和测量数据处理在时间上是接近同步的。
一种新的基于圆环点的摄像机自标定方法
Ã
摘要: 提出了一种基于圆环点的新的摄像机自标定方法.该方法仅要求摄像机在 3 个(或 3 个以上)不同方位摄取 一个含有若干条直径的圆的图像 , 即可线性求解全部摄像机内参数 .该方法原理简单 , 完全摆脱了匹配问题 ,也无 须知道任何物理度量 .整个定标过程不需要人的干预 ,可以自动进行 ,非常适合非视觉专业人员使用 . 模拟和真实 图像实验表明,该方法精确度较高,鲁棒性较强,有一定的实用性. 关 键 词: 摄像机标定;圆环点;绝对二次曲线 中图法分类号: TP391 文献标识码: A
u s v = K [r1 1
T
r2
r3
由上式 , 模板平面上的点 [x, y, z , t ] 也可用二维齐次坐标 [x, y, t ] 来表示 . 根据射影几何的概念 , 模板平面上 所 有 满 足 t = 0 的 点 构 成 了 该 模 板 平 面 的 无 穷 远 直 线 l∞ . 我 们 考 虑 l∞ 上 的 两 个 特 殊 点 ~ ~ I (1, i,0,0)T , J (1,−i,0,0)T (通常称为圆环点 )[8], 不难证明 : I , J 的坐标满足方程 M T M = 0 ,即 I , J 是 ω 上的点 . 如 果假设 I , J 的像点分别为 I m , J m ,则 I m , J m 应落在 ω 的像上,即有:
孟晓桥 等: 一种新的基于圆环点的摄像机自标定方法
959
Fig.3
图3 1.2 计算隐消线方程
Model plane
模板平面
Fig.4
From model plane to image plane
图4 模板平面的成像
图 3 中过圆心 O 的一条直线 L1 交圆于点 A1 , B1 ,交 l∞ 于 C1 ,则根据射影几何理论, A1 , B1 , O , C1 四点的交比 为 −1,即 ( A1 B1 , OC1 ) =
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最后剩余的椭圆记为臣,B就是椭圆I;
3)计算椭网E,和E:连线的中点O,记过点O和椭 圆如圆心的直线为£州,则E。和E:中离直线L。。较近的 就是椭圆Ⅳ,不失一般性,假设E。被判为椭圆Ⅳ,则E 为椭圆V。
4)设过椭网Ⅳ和I的圆心的直线为£m。,当观察者 沿着直线L…从椭圆Ⅳ向椭圆I行进时(以后凡是涉及 到点与直线的位置判断时,观察者总是从商线的第1个 下标点走向第2个下标点),如果色位于观察者左边的
万方数据
第2期
夏f■波等:基于圆形标志点的全自动相机标定方法
大,很容易造成误匹配。 典型的计算机用户只是偶尔使用一下视觉任务,一
般不愿意投资昂贵的设备。冈此,灵活、稳定和廉价是非 常藿要的。为此,本文在圆点模式的基础上,增设了5个 大阅作为方位网,设计出一种新的嘲型标定模式。经过 陶像闽值化和椭嘲检测等前处理后,提出r存圆型标定 模式下的标志点自动检测和旺配算法,并集成现有的相 机内外参数计算方法,最终实现相机的全自动标定。 2标定系统概述
Key words:camera calibration;circular marker;automatic matching;computer vision
1引
言
相机标定是计算机视觉研究的基础,在三维重建与 目标跟踪定位方面具有莺要的应用。在高精度的视觉任 务中,一般都采用标定板进行相机内参数标定。标定板 上布有规则的控制点,它们的坐标事先已知,定位误差通 常在斗级。自从Tsai…和Zhang嵋。的经典论文相继问世 以来,相机标定已被认为是一项较为成熟的技术。但是, 现有的标定算法通常都假设不同图像之间标志点的对应 关系已经确定,重点研究如何精确地计算内外参数一1。 而标志点间的I瓦.fld问题长期来没有得到足够的重视,一
设过椭噱1 m和Ⅱ的圆心的直线为Lm∽设9为直线 ‰,。与LIv.。之11;IJ的央角(从‰.II到LIv.。为逆时针,驴为 正)。
1)p>900,如图4(a)所示。根据椭圆Ⅱ和I,计 算巳中位于直线L儿,左侧且离“,最远的点,即为A点。 同理,可以确定口、C、D。计算P。中距离直线厶.。最近 的J7、r,个点,并按离直线A点的距离从小到大的顺序排 列,这Ⅳ。个点正好对应着标定板中的左起第l列。计算 P。中离直线‰.。最近的M个点,并按离直线L.。的距 离从小到大的顺序排列,把排序后的Ⅳ。个点记为集合 PIII.II。对于P。∈PⅢ.。(k=2,…,札),计算过P。且平行 于乙.。的直线k,求P。中距离乞最近的Ⅳ,个点,设A’ 和占7是这札个点中最远的两个点,且A’离A比B’离A 更近,将这Ⅳ,个点按距离A’由近到远的顺序排列,生成 集合只w,那么只∞,正好对应着标定板中的左起第k 列的标志点。更新A=A’,B=B’,开始考察P川。依 次类推,可以实现所有标志点的匹配。
得越规则,P。点就越有可能是标志点。但是,对于某些线
万方数据
370
仪器仪表学报
第3 0卷
性度较好的噪声点,仅靠单个方向的H。很可能造成误
热一=怒小端, 判。因此,定义P。成为标志点的代价函数如下:
C。=min(T,,T2,…,瓦)
(3)
疋=端,瓦=揣川”) ,H.1+Hd
,Hn+Ho
1
3一£(厶。。,£P.。)’14一£(£,.砘,Lp.崩)’
定义集合P怖。中的元素在商线k.。方向的间距规 则度为R。:
网2系统结构
Fig.2 Structure of the proposed system
3圆形标志点的检测
3.1图像预处理 由于标定板通常是黑底白图案,因此采用阈值的办
法就可以把图像中感兴趣的区域从背景中分割出来。本 文基于图像灰度直方网,通过迭代的方式来实现阈值的
3.2标志点检测
首先约定标定板中标志点的编码顺序,如图l所示。
设标定板共有Ⅳ。个标志点,N。=N,×N,,札为沿X轴
方向的标志点列数,Ⅳ.为沿,,轴方向的标志点行数,纵
向间距等于横向间距。设N。j。=rain(N,,N,),对于图1
中的标定板,N。。。=9。在复杂背景下,经过椭圆检测
后,椭跪l集合P中的元素个数ⅣP一般大于等于Ⅳ。,标志
表示取锐角。C。表示P。点的邻域规则分布性。采用式 (3),标志点和噪声的代价函数值通常相差一个数量级 左右,凶此比较容易分离。
求P中所有点的代价函数,并按从小到大的顺序排 列,则排在前面的虬个点即为标志点,记为尸。。
4圆形标志点的匹配
在3.2节,从图像中检测出来的标志点还未与标定 板编码建立起对应关系,为此,利用标定板中5个大圆的 位置信息,提m一种自动的标志点匹配算法。
Y,)向点e(茗。,Y。)行进时,C(戈,Y)在观察者的左方,反 之,C(菇,),)在观察者的右方。
到此,5个大椭圆全被识别m来,并建立起了与标定 板中5个大圆的一一对应关系,接下来将讨论如何利用5 个大圆找出所有标志点的匹配关系。
设标定板左下标志点为A,左上标志点为B,右下标 志点为C,右上标志点为D,如图l所示。我们首先根据 5个已知的椭圆找出标志点A、口、c、D,然后由这4个 标志点确定别的标志点。
本文使用如图1所示的标定板,其参数为:沿x轴方 向的网形标志列数札=1l,沿y轴方向的圆形标志行 数N.=9,纵向和横向间距皆为35 mln,5个大网的直径 皆为20 am,小圆直径皆为10 mm。
图1标志点编码
Fig.1 Encoded markers
整个标定系统结构如图2所示。
一一一
自动选择川。阈值分割后的图像一般含有冗余信息,很 难通过常规去噪方法把它们剔出。由于采用了圆形标志 点,经过透视变换后,它在图像中的像为椭圆,因此,可以 币IIJll椭圆检测的方法来滤出罔中明硅的冗余信息。椭圆 检测方法种类繁多,这单直接借用文献[12]的方法。设 P为所有枪测到的椭圆点集合。终椭圆检测后,大量的 冗余信息被去除,但是,一些与标志点的形状大小都非常 相似的椭嘲形K域依然保留r下来。
收稿日期:2007—12
Received Date:2007.12
般都采用手工的方式指定对应关系,使得相机标定依然 是一个耗时而费力的过程。因此,研究可靠而自动的匹 配算法是实现全自动相机标定的关键所在。
标志点的匹配与标定板的模式密切相关。采用自我 识别的标志点可以实现自动匹配。4剖,但是该模式的制作 难度较高,价格偏贵。目前,大多数匹配算法都是针对棋 盘模式的,虽然取得了长足的进展M1,但这些算法对噪 声和图像模糊比较敏感。鉴于棋盘模式固有的局限性, 为了确保角点的提取精度,通常要求较高的图像质鼍。 相反,圆型标志点对图像质量要求相对较低。1…,具有较 好的实用价值,但针对这种模式的匹配几乎都是采用纯 手动方式进行的,如果要标定几十幅图像,工作量相当
一% II ‰∑旦之ER一。
式中:弘呻(鼍焉 11,z=1,2,…,Ⅳ豳一2,
reciP(茗)={:Z三: 。设尸心。中距离直线o.,。最远
的点为P,,距离为d(Lp。,办),那么,P舳i。中的元素在
£。h方向的线性间距规则度峨可定义为:
日。=RⅡ·d(L。,乃)
(2)
H。i的值越小,说明PM。中的元素在0棚法与1)类似,不 再赘述。
点榆测的实质就是删除多余的元素,使N,=N。。基于 上面的约定,本文提m了一种基于代价函数的标志点检
测算法。
对于任意的P。∈P,求P中距离Pj最近的4个点q,,
P,与每个qi相连可以形成4条ifi:线L。(,=l,2,3,4)。
对于每条直线£。,计算P巾距离£。。,最近的Ⅳ。。个点 (包括P。和吼本身),记这N。.。个点构成的集合为JP№;。。
则为椭圆Ⅲ,反之为椭圆Ⅱ。假设E,被判为椭圆Ⅲ,则 E.为椭圆Ⅱ。点与直线的方位关系可以通过下面的方
法判断:设c(算,Y)、s(戈,,Y,)和e(茗。,Ye)为平面上的3
点,c点与直线L。的位置关系判别式为:
F=Y(并。一石,)一茗(Y。一Y。)+x,y,一戈。),,
(4)
如果F>0,表示当观察者沿着直线L。从点s(t,
Fully automatic camera calibration method based on circular markers
Xia Renbo,Liu Weijun,Zhao Jibin,Xu Jinting (Advanced Equipment Research Laboratory,Shenyang Institute ofAutomation。
第30卷第2期 2009年2月
仪器仪 表学报
Chinese Journal of Scientific[nstrument
V01.30 No.2 Feb.2009
基于圆形标志点的全自动相机标定方法
夏仁波,刘伟军,赵吉宾,徐金亭 (中国科学院沈阳自动化所现代装备研究室沈阳1 10016)
摘要:相机标定是2D图像重建3D测度信息的关键步骤,也是一项耗时的任务,由于标定过程中经常需要人工寻找对应点。 本文提出了一种基于圆形标志点的全自动相机标定方法。首先,在传统圆形标志点模板的基础上增设了5个方位圆。然后提 出了新标定板下图像特征点的自动检测和旺配算法。匹配结果直接作为Zhang的算法的输入,从而计算出相机内外参数,避免 了标定过程的人工干预。最终实验结果显爪r所提方法在不同场景和光照条件下的自动性和正确性。 关键词:相机标定;圆形标志点;自动肛配;计算机视觉 中图分类号:TP391.41 文献标识码:A 国家标准学科分类代码:520.2040
设P。。中距离最远的两个点分别为p。和p庀,把P。i。中
的点按距离lp。从近到远的顺序排列,得到如图3中的茗,
(Z=1,2,…,~。。)。
工5舻,)
J:
.●、
工R
n
孽令前≮等… 睾薯≤≤釜!
L pq?
图3 P。点邻域的间距规则度
Fig.3 Interval regularity of the neighborhood of Pf