8251可编程通信实验

一、实验目的与要求
了解8251的内部结构,工作原理;了解8251与8088的接口逻辑;掌握对8251的初始化编程方法,学会使用8251实现设备之间的串行通信。
二、实验逻辑原理图与分析
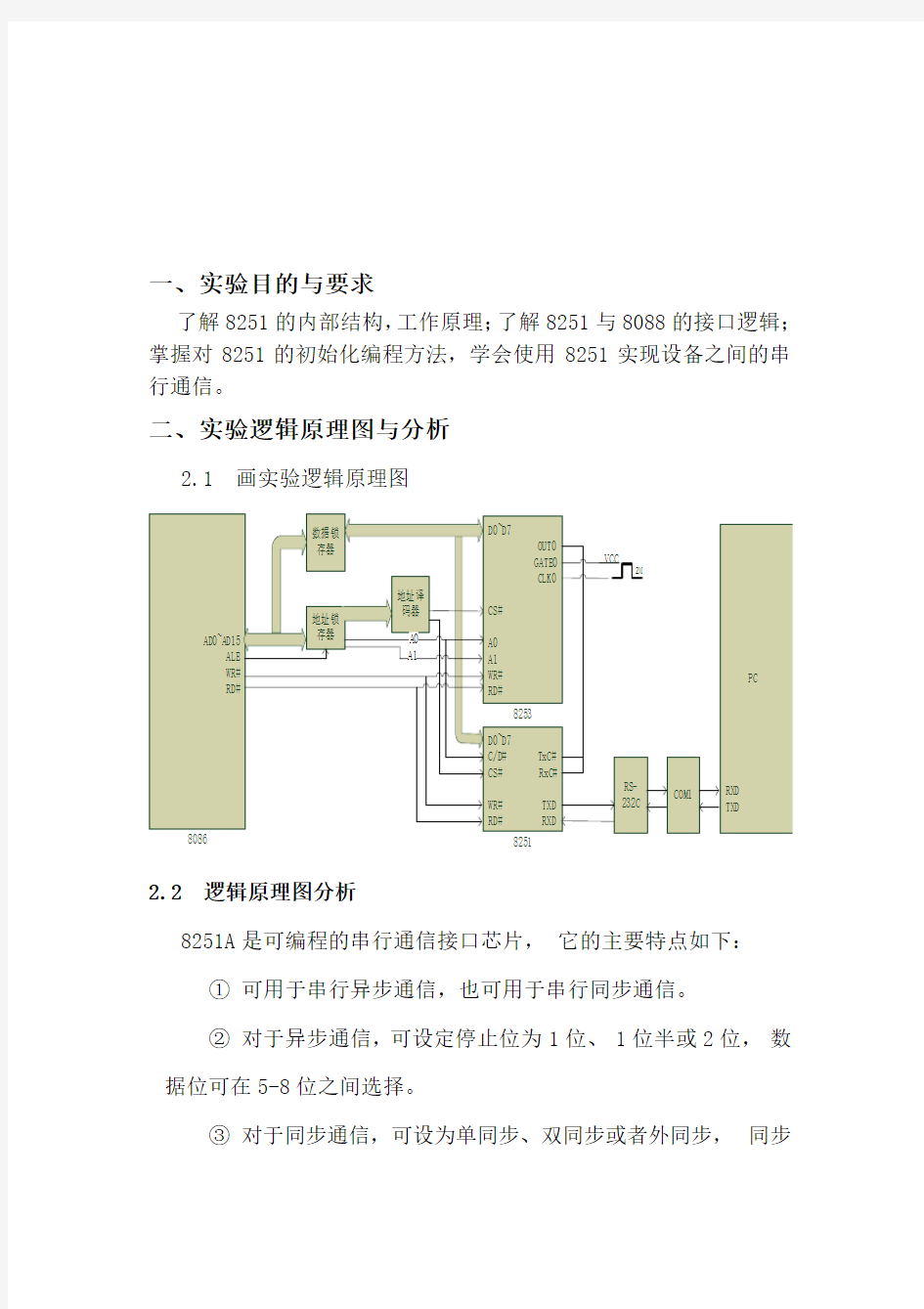
2.1 画实验逻辑原理图
AD0~AD15
ALE
WR#
RD#数据锁
存器
地址锁
存器
地址译
码器
8086
8253
D0~D7
OUT0
GATE0
CLK0
CS#
A0
A1
WR#
RD#
A0
A1
VCC
2M
D0~D7
C/D# TxC#
CS# RxC#
WR# TXD
RD# RXD
8251
RS-
232C
COM1
PC
RXD
TXD
2.2 逻辑原理图分析
8251A是可编程的串行通信接口芯片,它的主要特点如下:
①可用于串行异步通信,也可用于串行同步通信。
②对于异步通信,可设定停止位为1位、 1位半或2位,数据位可在5-8位之间选择。
③对于同步通信,可设为单同步、双同步或者外同步,同步
字符可由用户自己设定。
④异步通信的时钟频率可设为波特率的1倍、16倍或64倍。
⑤可以设定奇偶校验的方式,也可以不校验。校验位的插入、检出及检错都由芯片本身完成。
⑥在异步通信时,波特率的可选范围为0~19.2千波特;在同步通信时,波特率的可选范围为0~64千波特。
⑦提供与外部设备特别是调制解调器的联络信号,便于直接和通信线路相连接。
⑧接收、发送数据分别有各自的缓冲器,可以进行全双工通信。
8251A内除具有可读可写的数据寄存器外,还具有只可写的控制字寄存器和只可读的状态寄存器。控制字寄存器寄存方式控制字和命令控制字。
三、程序分析
3.1程序功能
实现8251A与PC机的串行通讯,使用8253作分频器提供8251的收发时钟。
3.2程序分析
INIT_8253 PROC NEAR
MOV DX,W_8253_C
MOV AL,37H
OUT DX,AL
MOV DX,W_8253_T0
MOV AL,26H
OUT DX,AL
MOV AL,0
OUT DX,AL
上述程序段的功能:初始化8251,初始化控制字,起分频作用,波特率为4800,BCD码计数。
MOV DX,CTL_ADDR
MOV AL,7EH
OUT DX,AL
上述程序段的功能:初始化8251,进行异步传输,波特率系数为16,8个数据位,一个停止位,偶校验。
Receive_Group PROC NEAR
LEA DI,Receive_Buffer
Receive_Group1:CALL Receive_Byte
STOSB
LOOP Receive_Group1
RET
Receive_Group ENDP
上述程序段的功能:接受一组数据,CX--接受数目,应用存串指令STOSB,从“接受一个字节”AL寄存器中的内容存到DI所指向的接受缓冲寄存器中。
DLTIME PROC NEAR
MOV CX,10
LOOP $
RET
DLTIME ENDP
上述程序段的功能:延时,由于8251工作速度慢,所以每送一个控制字,得等待一会。
四、实验数据和结果分析
4.1 实验结果数据
发送缓冲区的数据:fsds13
接收缓冲区:fsds13
4.2 结果数据分析
向8251发送数据fsds13,接收一批数据fsds13,由程序代码Receive_Buffer DB 10 DUP(0),Send_Buffer EQU Receive_Buffer可知,在8251通信正确下,发送缓冲区和接受缓冲区的内容一致。
五、实验问题分析、思考题与小结
5.1实验问题分析、思考题
在实验课上,老师向我们提出是如何接收一组数据的,通过查阅书籍和同学们一起讨论,发现是先接受一个字节,并存入AL 寄存器中,再查看其是否接受完毕,若接受完毕,则AX/AL中数
存入内存单元。
5.2实验小结
通过分支实验,使我了解了8251的内部结构,工作原理;
还了解了8251与8088的接口逻辑;并掌握对8251的初始化编程方法,和学会使用8251实现设备之间的串行通信。
得分(百分制)
Linux进程间通信(2)实验报告
实验六:Linux进程间通信(2)(4课时) 实验目的: 理解进程通信原理;掌握进程中信号量、共享内存、消息队列相关的函数的使用。实验原理: Linux下进程通信相关函数除上次实验所用的几个还有: 信号量 信号量又称为信号灯,它是用来协调不同进程间的数据对象的,而最主要的应用是前一节的共享内存方式的进程间通信。要调用的第一个函数是semget,用以获得一个信号量ID。 int semget(key_t key, int nsems, int flag); key是IPC结构的关键字,flag将来决定是创建新的信号量集合,还是引用一个现有的信号量集合。nsems是该集合中的信号量数。如果是创建新集合(一般在服务器中),则必须指定nsems;如果是引用一个现有的信号量集合(一般在客户机中)则将nsems指定为0。 semctl函数用来对信号量进行操作。 int semctl(int semid, int semnum, int cmd, union semun arg); 不同的操作是通过cmd参数来实现的,在头文件sem.h中定义了7种不同的操作,实际编程时可以参照使用。 semop函数自动执行信号量集合上的操作数组。 int semop(int semid, struct sembuf semoparray[], size_t nops); semoparray是一个指针,它指向一个信号量操作数组。nops规定该数组中操作的数量。 ftok原型如下: key_t ftok( char * fname, int id ) fname就是指定的文件名(该文件必须是存在而且可以访问的),id是子序号,虽然为int,但是只有8个比特被使用(0-255)。 当成功执行的时候,一个key_t值将会被返回,否则-1 被返回。 共享内存 共享内存是运行在同一台机器上的进程间通信最快的方式,因为数据不需要在不同的进程间复制。通常由一个进程创建一块共享内存区,其余进程对这块内存区进行读写。首先要用的函数是shmget,它获得一个共享存储标识符。 #include
线程实现邮箱通信-实验报告
进程通信实验报告 一、实验名称:进程通信 二、实验目的:掌握用邮箱方式进行进程通信的方法,并通过设计实现简单邮箱理解进程通信中的同步问题以及解决该问题的方法。 三、实验原理:邮箱机制类似于日常使用的信箱。对于用户而言使用起来比较方便,用户只需使用send ()向对方邮箱发邮件 receive ()从自己邮箱取邮件, send ()和 receive ()的内部操作用户无需关心。因为邮箱在内存中实现,其空间有大小限制。其实send ()和 receive ()的内部实现主要还是要解决生产者与消费者问题。 四、实验内容:进程通信的邮箱方式由操作系统提供形如send ()和receive ()的系统调用来支持,本实验要求学生首先查找资料了解所选用操作系统平台上用于进程通信的系统调用具体形式,然后使用该系统调用编写程序进行进程间的通信,要求程序运行结果可以直观地体现在界面上。在此基础上查找所选用操作系统平台上支持信号量机制的系统调用具体形式,运用生产者与消费者模型设计实现一个简单的信箱,该信箱需要有创建、发信、收信、撤销等函数,至少能够支持两个进程互相交换信息,比较自己实现的信箱与操作系统本身提供的信箱,分析两者之间存在的异同。 五、背景知识介绍: 1、sembuf 数据结构 struct sembuf { unsigned short int sem_num; //semaphore number short int sem_op; //semaphore operation short int sem_flg; //operation flag }; sem_num :操作信号在信号集中的编号,第一个信号的编号是0。 进程A 进程B 信箱A 信箱B Send() Send() receive() receive()
8251串行通讯实验
安徽师范大学数计学院实验报告 专业名称11计科 课程微机原理 实验名称串行通信实验姓名 学号110704012
8251 可编程串行口与PC 机通讯实验 一、实验目的 (1) 掌握8251 芯片的结构和编程,掌握微机通讯的编制。 (2) 学习有关串行通讯的知识。 (3) 学习PC 机串口的操作方法。 二、实验说明 1、8251 信号线 8251 是CPU 与外设或Mode 之间的接口芯片,所以它的信号线分为两组:一组是用于与CPU 接口 的信号线,另一组用于与外设或Mode 接口。 (1)与CPU 相连的信号线: 除了双向三态数据总线(D7~D0)、读(RD)、写(WR)、片选(CS)之外,还有: RESET:复位。通常与系统复位相连。 CLK:时钟。由外部时钟发生器提供。 C/D:控制/数据引脚。 TxRDY:发送器准备好,高电平有效。
TxE:发送器空,高电平有效。 RxRDY:接收器准备好,高电平有效。 SYNDET/BRKDET:同步/中止检测,双功能引脚。 (2)与外设或Mode 相连的信号线: DTR:数据终端准备好,输出,低电平有效。 DSR:数据装置准备好,输入,低电平有效。 RTS:请求发送,输出,低电平有效。 CTS:准许传送,输入,低电平有效。 TxD:发送数据线。 RxD:接收数据线。 TxC:发送时钟,控制发送数据的速率。 RxC:接收时钟,控制接收数据的速率。 2、8251 的初始化编程和状态字 8251 是一个可编程的多功能串行通信接口芯片,在使用前必须对它进行初始化编程。初始化编 程包括CPU 写方式控制字和操作命令字到8251 同一控制口,在初始化编程时必须按一定的顺序。如 下面的流程图:
串口通信实验报告全版.doc
实验三双机通信实验 一、实验目的 UART 串行通信接口技术应用 二、实验实现的功能 用两片核心板之间实现串行通信,将按键信息互发到对方数码管显示。 三、系统硬件设计 (1)单片机的最小系统部分 (2)电源部分 (3)人机界面部分
数码管部分按键部分 (4)串口通信部分 四、系统软件设计 #include
sbit L1=P0^5; sbit L2=P0^6; sbit L3=P0^7; uint m=0,i=0,j; uchar temp,prt; /***y延时函数***/ void delay(uint k) { uint i,j; //定义局部变量ij for(i=0;i { m=1; //KEY1键按下 return(m); } if(H2==0) { m=4; //KEY4键按下 return(m); } } } if(L2==0) { delay(5); if (L2==0) { L2=0;H1=1;H2=1; if(H1==0) { m=2; //KEY2键按下 return(m); } if(H2==0) { m=5; //KEY5键按下 return(m); } } } if(L3==0) { delay(5); if (L3==0) { L3=0;H1=1;H2=1; if(H1==0) { m=3; //KEY3键按下 实验一进程管理 1.实验目的: (1)加深对进程概念的理解,明确进程和程序的区别; (2)进一步认识并发执行的实质; (3)分析进程争用资源的现象,学习解决进程互斥的方法; (4)了解Linux系统中进程通信的基本原理。 2.实验预备内容 (1)阅读Linux的源码文件,加深对进程管理概念的理解; (2)阅读Linux的fork()源码文件,分析进程的创建过程。 3.实验内容 (1)进程的创建: 编写一段程序,使用系统调用fork() 创建两个子进程。当此程序运行时,在系统中有一个父进程和两个子进程活动。让每一个进程在屏幕上显示一个字符:父进程显示字符“a”,子进程分别显示字符“b”和“c”。试观察记录屏幕上的显示结果,并分析原因。 源代码: #include <> #include <> #include int p1,p2; p1=fork(); ockf()函数是将文件区域用作信号量(监视锁),或控制对锁定进程的访问(强制模式记录锁定)。试图访问已锁定资源的其他进程将返回错误或进入休态,直到资源解除锁定为止。而上面三个进程,不存在要同时进入同一组共享变量的临界区域的现象,因此输出和原来相同。 (3) a) 编写一段程序,使其实现进程的软中断通信。 要求:使用系统调用fork() 创建两个子进程,再用系统调用signal() 让父进程捕捉键盘上来的中断信号(即按DEL键);当捕捉到中断信号后,父进程用系统调用Kill() 向两个子进程发出信号,子进程捕捉到信号后分别输出下列信息后终止: Child Process 1 is killed by Parent! Child Process 2 is killed by Parent! 父进程等待两个子进程终止后,输出如下的信息后终止: Parent Process is killed! 课程名称:Zigbee技术及应用实验项目:串口通信实验指导教师: 专业班级:姓名:学号:成绩: 一、实验目的: (1)认识串口通信的概念; (2)学习单片机串口通信的开发过程; (3)编写程序,使单片机与PC通过串口进行通信。 二、实验过程: (1)根据实验目的分析实验原理; (2)根据实验原理编写C程序; (3)编译下载C程序,并在实验箱上观察实验结果。 三、实验原理: 串行通信是将数据字节分成一位一位的形式在一条传输线上逐个地传送,此时只需要一条数据线,外加一条公共信号地线和若干条控制信号线。因为一次只能传送一位,所以对于一个字节的数据,至少要分8位才能传送完毕,如图3-1所示。 图2-1串行通信过程 串行通信制式: (1)单工制式 这种制式是指甲乙双方通信时只能单向传送数据,发送方和接收方固定。 (2)半双工制式 这种制式是指通信双方都具有发送器和接收器,即可发送也可接收,但不能同时接收和发送,发送时不能接收,接收时不能发送。 (3)全双工制式 这种制式是指通信双方均设有发送器和接收器,并且信道划分为发送信道和接收信道,因此全双工制式可实现甲乙双方同时发送和接收数据,发送时能接收,接收时能发送。 三种制式分别如图3-2所示 图3-2串行通信制式 3.1硬件设计原理 CC2530有两个串行通信接口USART0和USART1,两个USART具有同样的功能,可已分别运行于UART模式和同步SPI模式。 CC2530的两个串行通信接口引脚图分布如表3-1所示 表3-1 CC2530串行通信口引脚图分布 本实验CC2530模块使用的是USART1的位置2,P1_6和P1_7。 串行通信实验报告 班级学号日期 一、实验目的: 1、掌握单片机串行口工作方式的程序设计,及简易三线式通讯的方法。 2、了解实现串行通讯的硬环境、数据格式的协议、数据交换的协议。 3、学习串口通讯的程序编写方法。 二、实验要求 1.单机自发自收实验:实现自发自收。编写相应程序,通过发光二极管观察收发状态。 2.利用单片机串行口,实现两个实验台之间的串行通讯。其中一个实验台作为发送方,另一侧为接收方。 三、实验说明 通讯双方的RXD、TXD信号本应经过电平转换后再行交叉连接,本实验中为减少连线可将电平转换电路略去,而将双方的RXD、TXD直接交叉连接。也可以将本机的TXD接到RXD上。 连线方法:在第一个实验中将一台实验箱的RXD和TXD相连,用P1.0连接发光二极管。波特率定为600,SMOD=0。 在第二个实验中,将两台实验箱的RXD和TXD交叉相连。编写收发程序,一台实验箱作为发送方,另一台作为接收方,编写程序,从内部数据存储器20H~3FH单元中共32个数据,采用方式1串行发送出去,波特率设为600。通过运行程序观察存储单元内数值的变化。 四、程序 甲方发送程序如下: ORG 0000H LJMP MAIN ORG 0023H LJMP COM_INT ORG 1000H MAIN: MOV SP,#53H MOV 78H,#20H MOV 77H,00H MOV 76H,20H MOV 75H,40H ACALL TRANS HERE: SJMP HERE TRANS: MOV TMOD,#20H MOV TH1,#0F3H MOV TL1,#0F3H MOV PCON,#80H SETB TR1 MOV SCON,#40H MOV IE,#00H CLR F0 MOV SBUF,78H WAIT1: JNB TI,WAIT1 CLR TI MOV SBUF,77H WAIT2: JNB TI,WAIT2 CLR TI MOV SBUF,76H WAIT3: JNB TI,WAIT3 CLR TI 单片机实验报告 实验名称:串行通信实验 姓名:高知明 学号:110404320 班级:通信3 实验时间:2014-6-11 南京理工大学紫金学院电光系 一、实验目的(四号+黑体) 1、理解单片机串行口的工作原理; 2、学习使用单片机的TXD\RXD口; 3、了解MAX232芯片的作用; 二、实验原理 MCS-51单片机内部集成有一个UART,用于全双工方式的串行通信,可以发送、接收数据。他有两个相互独立的接收、发送缓冲器,这两个缓冲器同名(SBUF),共用一个地址号(99H)。发送缓冲器只能写入,不能读出,接受缓冲器只能读出,不能写入。要发送的字节数据直接写入发送缓冲器。SBUF=a;当UART接收到数据后,CPU从接收缓冲器中读取数据,a=SBUF;串行口内部有两个移位寄存器,一个用于串行发送,一个用于串行接收。定时器T1作为波特率发生器,波特率发生器的溢出信号昨接受或发送移位寄存器的位移时钟。TI与RI分别为发送完数据的中断标志,用来想CPU发中断请求。 三、实验内容 1、发送信号 1)C51程序: #include 2、接受装置: 1)C51程序: #include 串行通信实验报告 班级姓名学号日期 一、实验目的: 1、掌握单片机串行口工作方式的程序设计,及简易三线式通讯的方法。 2、了解实现串行通讯的硬环境、数据格式的协议、数据交换的协议。 3、学习串口通讯的程序编写方法。 二、实验要求 1.单机自发自收实验:实现自发自收。编写相应程序,通过发光二极管观察收发状态。 2.利用单片机串行口,实现两个实验台之间的串行通讯。其中一个实验台作为发送方,另一侧为接收方。 三、实验说明 通讯双方的RXD、TXD信号本应经过电平转换后再行交叉连接,本实验中为减少连线可将电平转换电路略去,而将双方的RXD、TXD直接交叉连接。也可以将本机的TXD接到RXD上。 连线方法:在第一个实验中将一台实验箱的RXD和TXD相连,用P1.0连接发光二极管。波特率定为600,SMOD=0。 在第二个实验中,将两台实验箱的RXD和TXD交叉相连。编写收发程序,一台实验箱作为发送方,另一台作为接收方,编写程序,从内部数据存储器20H~3FH单元中共32个数据,采用方式1串行发送出去,波特率设为600。通过运行程序观察存储单元内数值的变化。 四、程序 甲方发送程序如下: ORG 0000H LJMP MAIN ORG 0023H LJMP COM_INT ORG 1000H MAIN: MOV SP,#53H MOV 78H,#20H — MOV 77H,00H MOV 76H,20H MOV 75H,40H ACALL TRANS HERE: SJMP HERE TRANS: MOV TMOD,#20H MOV TH1,#0F3H MOV TL1,#0F3H MOV PCON,#80H SETB TR1 MOV SCON,#40H MOV IE,#00H CLR F0 MOV SBUF,78H WAIT1: JNB TI,WAIT1 CLR TI MOV SBUF,77H WAIT2: JNB TI,WAIT2 CLR TI MOV SBUF,76H WAIT3: JNB TI,WAIT3 CLR TI 进程间通信实验报告 班级:10网工三班学生姓名:谢昊天学号:1215134046 实验目的和要求: Linux系统的进程通信机构 (IPC) 允许在任意进程间大批量地交换数据。本实验的目的是了解和熟悉Linux支持的消息通讯机制及信息量机制。 实验内容与分析设计: (1)消息的创建,发送和接收。 ①使用系统调用msgget (), msgsnd (), msgrev (), 及msgctl () 编制一长度为1k 的消息的发送和接收程序。 ②观察上面的程序,说明控制消息队列系统调用msgctl () 在此起什么作用? (2)共享存储区的创建、附接和段接。 使用系统调用shmget(),shmat(),sgmdt(),shmctl(),编制一个与上述功能相同的程序。(3)比较上述(1),(2)两种消息通信机制中数据传输的时间。 实验步骤与调试过程: 1.消息的创建,发送和接收: (1)先后通过fork( )两个子进程,SERVER和CLIENT进行通信。 (2)在SERVER端建立一个Key为75的消息队列,等待其他进程发来的消息。当遇到类型为1的消息,则作为结束信号,取消该队列,并退出SERVER 。SERVER每接收到一个消息后显示一句“(server)received”。 (3)CLIENT端使用Key为75的消息队列,先后发送类型从10到1的消息,然后退出。最后的一个消息,既是 SERVER端需要的结束信号。CLIENT每发送一条消息后显示一句“(client)sent”。 (4)父进程在 SERVER和 CLIENT均退出后结束。 2.共享存储区的创建,附接和断接: (1)先后通过fork( )两个子进程,SERVER和CLIENT进行通信。 (2)SERVER端建立一个KEY为75的共享区,并将第一个字节置为-1。作为数据空的标志.等待其他进程发来的消息.当该字节的值发生变化时,表示收到了该消息,进行处理.然后再次把它的值设为-1.如果遇到的值为0,则视为结束信号,取消该队列,并退出SERVER.SERVER 每接收到一次数据后显示”(server)received”. (3)CLIENT端建立一个为75的共享区,当共享取得第一个字节为-1时, Server端空闲,可发送请求. CLIENT 随即填入9到0.期间等待Server端再次空闲.进行完这些操作后, CLIENT退出. CLIENT每发送一次数据后显示”(client)sent”. (4)父进程在SERVER和CLIENT均退出后结束。 实验结果: 1.消息的创建,发送和接收: 由 Client 发送两条消息,然后Server接收一条消息。此后Client Server交替发送和接收消息。最后一次接收两条消息。Client 和Server 分别发送和接收了10条消息。message 的传送和控制并不保证完全同步,当一个程序不再激活状态的时候,它完全可能继续睡眠,造成上面现象。在多次send message 后才 receive message.这一点有助于理解消息转送的实现机理。 Linux进程通信实验报告 一、实验目的和要求 1.进一步了解对进程控制的系统调用方法。 2.通过进程通信设计达到了解UNIX或Linux系统中进程通信的基本原理。 二、实验内容和原理 1.实验编程,编写程序实现进程的管道通信(设定程序名为pipe.c)。使 用系统调用pipe()建立一条管道线。而父进程从则从管道中读出来自 于两个子进程的信息,显示在屏幕上。要求父进程先接受子进程P1 发来的消息,然后再接受子进程P2发来的消息。 2.可选实验,编制一段程序,使其实现进程的软中断通信(设定程序名为 softint.c)。使用系统调用fork()创建两个子进程,再用系统调用 signal()让父进程捕捉键盘上来的中断信号(即按Del键),当父进程 接受这两个软中断的其中一个后,父进程用系统调用kill()向两个子 进程分别发送整数值为16和17的软中断信号,子进程获得对应软中 断信号后分别输出相应信息后终止。 三、实验环境 一台安装了Red Hat Linux 9操作系统的计算机。 四、实验操作方法和步骤 进入Linux操作系统,利用vi编辑器将程序源代码输入并保存好,然后 打开终端对程序进行编译运行。 五、实验中遇到的问题及解决 六、实验结果及分析 基本实验 可选实验 七、源代码 Pipe.c #include"stdio.h" #include"unistd.h" main(){ int i,j,fd[2]; char S[100]; pipe(fd); if(i=fork==0){ sprintf(S,"child process 1 is sending a message \n"); write(fd[1],S,50); sleep(3); return; } if(j=fork()==0){ sprintf(S,"child process 2 is sending a message \n"); write(fd[1],S,50); sleep(3); return; 实验六串行口通信实验 一、实验内容 实验板上有RS-232接口,将该接口与PC机的串口连接,可以实现单片机与PC机的串行通信,进行双向数据传输。本实验要求当PC机向实验板发送的数字在实验板上显示,按实验板键盘输入的数字在PC机上显示,并用串口助手工具软件进行调试。 二、实验目的 掌握单片机串行口工作原理,单片机串行口与PC机的通信工作原理及编程方法。 三、实验原理 51单片机有一个全双工的串行通讯口,所以单片机和电脑之间可以方便地进行串口通信。进行串行通讯信要满足一定的条件,比如电脑的串口是RS232电平(-5~-15V为1,+5~+15V为0),而单片机的串口是TTL电平(大于+2.4V为1,小于- 0.7V为0),两者之间必须有一个电平转换电路实现RS232电平与TTL电平的相互转换。 为了能够在PC机上看到单片机发出的数据,我们必须借助一个Windows软件进行观察,这里我们可以使用免费的串口调试程序SSCOM32或Windows的超级终端。 单片机串行接口有两个控制寄存器:SCON和PCON。串行口工作在方式0时,可通过外接移位寄存器实现串并行转换。在这种方式下,数据为8位,只能从RXD端输入输出,TXD端用于输出移位同步时钟信号,其波特率固定为振荡频率的1/12。由软件置位串行控制寄存器(SCON)的REN位后才能启动,串行接收,在CPU将数据写入SBUF寄存器后,立即启动发送。待8位数据输完后,硬件将SCON寄存器的T1位置1,必须由软件清零。 单片机与PC机通信时,其硬件接口技术主要是电平转换、控制接口设计和远近通信接口的不同处理技术。在DOS操作环境下,要实现单片机与微机的通信,只要直接对微机接口的通信芯片8250进行口地址操作即可。WINDOWS的环境下,由于系统硬件的无关性,不再允许用户直接操作串口地址。如果用户要进行串行通信,可以调用WINDOWS的API 应用程序接口函数,但其使用较为复杂,可以使用KEILC的通信控件解决这一问题。 四、实验电路 [参考学习板说明书P27] 《嵌入式系统实验报告》 串行通信实验 南昌航空大学自动化学院050822XX 张某某 一、实验目的: 掌握μC/OS-II操作系统的信号量的概念。 二、实验设备: 硬件:PC机1台;MagicARM2410教学实验开发平台台。 软件:Windows 98/2000/XP操作系统;ADS 1.2集成开发环境。 三、实验内容: 实验通过信号量控制2个任务共享串口0打印字符串。为了使每个任务的字符串信息(句子)不被打断,因此必须引入互斥信号量的概念,即每个任务输出时必须独占串口0,直到完整输出字符串信息才释放串口0。 四、实验步骤: (1)为ADS1.2增加DeviceARM2410专用工程模板(若已增加过,此步省略)。 (2)连接EasyJTAG-H仿真器和MagicARM2410实验箱,然后安装EasyJTAG-H仿真器(若已经安装过,此步省略),短接蜂鸣器跳线JP9。 (3)启动ADS 1.2,使用ARM Executable Image for DeviceARM2410(uCOSII)工程模板建立一个工程UART0_uCOSII。(本范例在ADS文件夹中操作) (4)在ADS文件夹中新建arm、Arm_Pc、SOURCE文件夹。将μC/OS 2.52源代码添加到SOURCE文件夹,将移植代码添加到arm文件夹,将移植的PC服务代码添加到Arm_Pc文件夹。 (5)在src组中的main.c中编写主程序代码。 (6)选用DebugRel生成目标,然后编译链接工程。 (7)将MagicARM2410实验箱上的UART0连接跳线JP1短接,使用串口延长线把MagicARM2410实验箱的CZ11与PC机的COM1连接。 注意:CZ11安装在MagicARM2410实验箱的机箱右侧。 (8)PC机上运行“超级终端”程序(在Windows操作系统的【开始】->【程序】->【附件】->【通讯】->【超级终端】),新建一个连接,设置串口波持率为115200,具体设置参考图3.5,确定后即进入通信状态。 (9)选择【Project】->【Debug】,启动AXD进行JTAG仿真调试。 (10)全速运行程序,程序将会在main.c的主函数中停止(因为main函数起始处默认设置有断点)。 (11)可以单步运行程序,可以设置/取消断点,或者全速运行程序,停止程序运行,在超级终端上观察任务0和任务1的打印结果。 五、实验结论与思考题(手写,打印无效): 1、如果任务0删除语句“OSSemPost(UART0_Sem);”,那么程序还能否完全正常无误运行? 答:OSSemPost (OS_EVENT *pevent),这个函数是释放资源,执行后资源数目会加1。在该函数中,删除对应语句则使串口资源UART0_Sem始终无法释放。 实验三进程的同步 一、实验目的 1、了解进程同步和互斥的概念及实现方法; 2、更深一步的了解fork()的系统调用方式。 二、实验内容 1、预习操作系统进程同步的概念及实现方法。 2、编写一段源程序,用系统调用fork()创建两个子进程,当此程序运行时,在系统中有一个父进程和两个子进程活动。让每一个进程在屏幕上显示一个字符:父进程显示字符“a”;子进程分别显示字符“b”和字符“c”。程序的输出是什么?分析原因。 3、阅读模拟火车站售票系统和实现进程的管道通信源代码,查阅有关进程创建、进程互斥、进程同步的系统功能调用或API,简要解释例程中用到的系统功能或API的用法,并编辑、编译、运行程序,记录程序的运行结果,尝试给出合理的解释。 4、(选做)修改问题2的代码,使得父子按顺序显示字符“a”;“b”、“c”编辑、编译、运行。记录程序运行结果。 三、设计思想 1、程序框架 (1)创建两个子进程:(2)售票系统: (3)管道通信: 先创建子进程,然后对内容加锁,将输出语句存入缓存,并让子进程自己进入睡眠,等待别的进程将其唤醒,最后解锁;第二个子进程也执行这样的过程。父进程等待子进程后读内容并输出。 (4)修改程序(1):在子进程的输出语句前加上sleep()语句,即等待父进程执行完以后再输出。 2、用到的文件系统调用函数 (1)创建两个子进程:fork() (2)售票系统:DWORD WINAPI Fun1Proc(LPVOID lpPartameter); CreateThread(NULL,0,Fun1Proc,NULL,0,NULL); CloseHandle(hThread1); (HANDLE)CreateMutex(NULL,FALSE,NULL); Sleep(4000)(sleep调用进程进入睡眠状态(封锁), 直到被唤醒); WaitForSingleObject(hMutex,INFINITE); ReleaseMutex(hMutex); (3)管道通信:pipe(fd),fd: int fd[2],其中: fd[0] 、fd[1]文件描述符(读、写); lockf( fd,function,byte)(fd: 文件描述符;function: 1: 锁定 0:解锁;byte: 锁定的字节数,0: 从当前位置到文件尾); write(fd,buf,byte)、read(fd,buf,byte) (fd: 文件描述符;buf : 信息传送的源(目标)地址;byte: 传送的字节数); sleep(5); exit(0); read(fd[0],s,50) (4)修改程序(1):fork(); sleep(); 四、调试过程 1、测试数据设计 (1)创建两个子进程: 实验报告(附页) 一、实验内容 1、串口通信设置: 波特率为115200bps, 数据位为8位,停止位为1位; 2、按键传输数据到串口助手显示; (1)按1,串口显示:“This is Key 1”; D5亮 (2)按2,串口显示:“This is Key 2”; D6亮 (3)按3,串口显示:“This is Key 3”; D7亮 (4)按4,串口显示:“This is Key 4”; D8亮 (5)按“*”Key ,串口显示“All LEDs is Closed” ; 灯全灭; (6)按其它Key,串口显示:”Wrong Key” 3、通过串口小肋手,向实验设备发送信息: 发送字符:”D5”、”D6”、”D7”、”D8” ,则对应的D5、D6、D7、D8亮;若发送“5”、“6”、“7”、“8”则对应的D5、D6、D7、D8灭,如发送其它字符,则在串口助手中显示:“Error Code”; 二、实验方法 (1)利用参考代码构建工程。 (2)编写实验要求的实现实验要求的功能。 (3)连接实验箱,写入程序,测试代码。 三、实验步骤 1)正确连接JLINK 仿真器到PC 机和stm32 板,用串口线一端连接STM32 开发板,另一端连接PC 机串口。 2)用IAR 开发环境打开实验例程:在文件夹05-实验例程\第2 章\2.3-uart 下双击打开工程uart.eww,Project->Rebuild All 重新编译工程。 3)将连接好的硬件平台通电(STM32 电源开关必须拨到“ ON”),接下来选择Project->Download and debug 将程序下载到STM32 开发板中。4)下载完后可以点击“Debug”->“Go”程序全速运行;也可以将STM32 开发板重新上电或者按下复位按钮让刚才下载的程序重新运行。 5)通过串口小助手检验实验结果 四、实验结果 Main函数 #include"stm32f10x.h" 实验十单片机串行口与PC机通讯实验报告 ㈠实验目的 1.掌握串行口工作方式的程序设计,掌握单片机通讯的编制; 2.了解实现串行通讯的硬环境,数据格式的协议,数据交换的协议; 3.了解PC机通讯的基本要求。 ㈡实验器材 1.G6W仿真器一台 2.MCS—51实验板一台 3.PC机一台 ㈢实验内容及要求 利用8051单片机串行口,实现与PC机通讯。 本实验实现以下功能,将从实验板键盘上键入的字符或数字显示到PC 机显示器上,再将PC机所接收的字符发送回单片机,并在实验板的LED上显示出来。 ㈣实验步骤 1.编写单片机发送和接收程序,并进行汇编调试。 2.运行PC机通讯软件“commtest.exe”,将单片机和PC机的波特率均设定 为1200。 3.运行单片机发送程序,按下不同按键(每个按键都定义成不同的字符), 检查PC机所接收的字符是否与发送的字符相同。 4.将PC机所接收的字符发送给单片机,与此同时运行单片机接受程序,检 查实验板LED数码管所显示的字符是否与PC机发送的字符相同。 ㈤ 实验框图 源程序代码: ORG 0000H AJMP START ORG 0023H AJMP SERVE ORG 0050H START: MOV 41H,#0H ;对几个存放地址进行初始化 MOV 42H,#0H MOV 43H,#0H MOV 44H,#0H MOV SCON,#00H ;初始化串行口控制寄存器,设置其为方式0 LCALL DISPLAY ;初始化显示 MOV TMOD,#20H ;设置为定时器0,模式选用2 MOV TL1, #0E6H ;设置1200的波特率 MOV TH1, #0E6H SETB TR1 ;开定时器 MOV SCON,#50H ;选用方式1,允许接收控制 SETB ES SETB EA ;开中断 LOOP: ACALL SOUT ;键盘扫描并发送,等待中断 SJMP LOOP SERVE JNB RI,SEND ;判断是发送中断还是接收中断,若为发送中 断则调用 ACALL S IN ;发送子程序,否则调用接收子程序 RETI SEND: CLR TI ;发送子程序 RETI SIN: CLR RI ;接受子程序 MOV SCON, #00H MOV A, SBUF ;接收数据 LCALL XS ;调用显示子程序 RETI 子程序: SOUT: CLR TI ;清发送中断标志位 LCALL KEY ;调用判断按键是否按下子程序 MOV A,R0 ;将按键对应的数字存入A MOV SBUF,A ;输出按键数字给锁存 RET KEY: MOV P1,#0FFH ;将P1设置为输入口 MOV A, P1 CPL A ;将A内值取反 武汉工程大学计算机科学与工程学院 《操作系统》实验报告[Ⅰ] 一、实验目的 创建进程,实现进程消息通信和共享内存通信,了解进程的创建、退出和获取进程信。了解什么是映像文件、管道通信及其作用,掌握通过内存映像文件和管道技术实现进程通信。 二、实验内容 本例用三种方法实现进程通信,仅用于示例目的,没有进行功能优化。 1、创建进程A和B后,在进程A中输入一些字符,点“利用 SendMessage发送消息”按钮可将消息发到进程B。 2、在进程A中输入一些字符,点“写数据到内存映像文件”按钮, 然后在进程B中点“从内存映像文件读数据”按钮可收到消息。其中在点“写数据到内存映像文件”时,要求创建映像文件,B进程在印象文件中读取数据。 3、先在进程B中点“创建管道并接收数据”按钮,然后在进程A 中输入一些字符,点“写数据到管道文件”按钮可将消息发到进程B。管道是连接读/写进程使他们进行通信的一个共享文件,目的是更好地实现进程间的通信。 三、实验思想 这次试验最主要的内容和核心思想就是学会创建进程并实现进程间的简单通信、创建映像文件和创建管道文件来通信,后两者是实现进程通信的高级通信机制中的两种。. 创建一个程序A和程序B,其中程序A和B各有一个主窗体,A主窗体上要求可以实现创建进程B(即调用函数B)、结束进程B、关闭进程A、向进程B发送数据、创建映像文件、创建管道文件等功能,进程B要求有从映像文件读取数据、创建管道并接收数据、结束进程B功能。最终让A、B进程相互通信。 四、设计分析: 首先设得设计A、B两个程序的操作界面,然后编写各个功能模块。对于A 程序窗体,在“利用SendMessage发送消息”按钮的消息响应函数中,主要是利用Windows API函数CWnd::FindWindow来找到接收消息的窗体,即进程B,找到进程B后,利用这个函数返回的窗体指针的SendMessage函数来发送消息。在“写数据到内存印象文件”按钮的消息响应函数中,主要是利用函数CreateFileMapping来创建一个印象文件,这个函数返回的是这个印象文件的句柄,然后将这个句柄和要发送的消息字符串传递到函数sprintf中,就可以所要发送的消息写入印象文件,在B程序窗体中有个“从内存印象文件读数据”按钮,在这个按钮的消息响应函数中读取父进程所创建的印象文件中的数据就可以实现通信了。在B程序窗体按钮“写数据到管道文件”的消息响应函数中,不能直接将要发送的消息发送到管道文件,因为管道必须先由子进程通过函数CreateNamedPipe创建,只有待子进程创建好管道后父进程才能根据管道创建管道文件,将消息写入管道文件并及时发送给子进程。而且这个管道只能使用一次,即每次发送完消息后那个管道不能在使用了,必须再由子进程创建一个管道,A 进程才能再次创建管道文件并向其中写入消息。这个程序也不一定要MFC实现,还可以用其他的技术和语言实现,比如说Java、VB等,外表构架可以不一样,但核心技术都是一样的,只是不同的调用形式和调用方法,比如说在VB中,实现进程间的一般通信就是使用动态数据交换DDE,实现起来就比较简单,但是要创建映像文件和管道文件就比较繁琐,可以根据不同的需求采用不同的语言。 五、程序部分源代码: 1.“利用SendMessage发送消息”按钮中的主要代码 //找到接收消息的窗口(窗口名为Receiver) CString str="进程B"; CWnd *pWnd=CWnd::FindWindow(NULL,str); if(pWnd) { COPYDATASTRUCT buf; char * s=new char[m_Msg1.GetLength()]; //m_Msg1为CString类型的变量 s=m_Msg1.GetBuffer(0); 工程大学实验报告 专业班级:姓名:学号: 课程名称:操作系统 实验成绩:指导教师:蔡敦波 实验名称:进程控制与进程间通信 一、实验目的: 1、掌握进程的概念,明确进程和程序的区别。 2、认识和了解并发执行的实质。 3、了解什么是信号。 4、熟悉LINUX系统中进程之间软中断通信的基本原理。 二、实验内容: 1、进程的创建(必做题) 编写一段程序,使用系统调用fork( )创建两个子进程,在系统中有一个父进程和两个子进程活动。让每个进程在屏幕上显示一个字符;父进程显示字符“a”,子进程分别显示字符“b”和“c”。试观察记录屏幕上的显示结果,并分析原因。 <参考程序> 运行的结果是bca. 首先创建进程p1,向子进程返回0,输出b.又创建进程p2,向子进程返回0,输出c,同时向父进程返回子进程的pid,输出a 2、修改已编写的程序,将每个进程的输出由单个字符改为一句话,再观察程序执行时屏幕上出现的现象,并分析其原因。(必做题) <参考程序> # include 运行的结果是如上图所示. 首先创建进程p1,向子进程返回0,并for语句循环输出child +i字符串.又创建进程p2,向子进程返回0,输出字符串son+i,同时向父进程返回子进程的pid,输出字符串duaghter +i ,各打印5次。 计算机通讯网络 随堂实验报告 学院计算机与电子信息学院 专业电子信息工程班级电信08 -1班 姓名程跃斌学号 08034030117 指导教师左敬龙 实验报告评分:_______ 实验一串行通信实验 一.实验目的: 1.认识计算机具有串行通信的功能。 2.理解串行通信中数据位、校验位的关系。 3.能利用软件开发具有串行通信功能的程序。 二.实验原理: 计算机上的 机来说是发送数据,对另一台机就是接收数据,所以收、发数据线要换接。连接方法如下。 9芯对9芯串口 A机B机 2●←→●3 3●←→●2 5●←→●5 三.实验仪器: 计算机两台,串行通信电缆一条。 四.实验步骤: 步骤一:认识计算机上的串口,并将串口通信电缆正确的接在两台计算机上; 步骤二:通过windows已有的程序“超级终端”(打开方法:程序——附件——通信——超级终端)通过串行电缆初步认识计算机具有串行通信的功能; 步骤三:修改连接参数,测试建立的连接是否可以正常通信,如果出现异常,分析产生的原因; 步骤四:自己编程实现串口通信。在任何编程语言平台下都可以实现串口通信。同学们可根据自己熟悉的语言来编制串口通信程序。 实验程序流程图: 五.实验数据与分析: COM1参数设置:在这个对话框中,可以选择通信双方采用的通信速率、数据位的个数、奇偶校验位、停止位和可以使用的流量控制方法。不管设置什么参数,必须保证两台计算机的所有参数相同,而且数据传输速率不能超过115200bit/s。设置参数完毕后,单击“确定”按钮。 图1 COM1参数设置 通信双方可以互相发送一些字符。在缺省情况下,发送端发送的字符在本地不会显示。如果希望使用本地回显功能,则单击“文件”菜单,选择“属性”命令,在打开的窗口中选择“设置”选项卡,并单击“ASCII码设置”,打开如图2所示的对话框;选中“本地显示键 入的字符(E)”复选框,返回到超级终端窗口中,再发送一些字符,观察结果。进程管理实验报告文档
串口通信实验讲解
串行通信实验报告
单片机串行通信实验
串行通信实验报告
进程间通信实验报告
Linux进程通信实验报告
串行口通信实验 单片机实验报告
嵌入式系统实验报告-串行通信实验-答案
进程同步实验报告
串口通信实验
单片机串口通讯实验报告
操作系统进程创建及通信实验报告
进程控制与进程间通信操作系统实验报告
实验1 串行通信实验