自动控制仿真实验
《自动控制原理》控制系统的simulink仿真实验一
《自动控制原理》控制系统的simulink仿真实验一、实验目的1.初步了解Matlab中Simulink的使用方法,熟悉simulink模块的操作和信号线的连接。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,熟悉各种典型环节的响应曲线。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验仪器Matlab7.0 , 计算机三、实验原理Simulink是MATLAB中的一种可视化仿真工具。
Simulink是一个模块图环境,用于多域仿真以及基于模型的设计。
它支持系统设计、仿真、自动代码生成以及嵌入式系统的连续测试和验证。
四、实验内容及步骤1、建立仿真模型系统1.1 运行Matlab,在命令窗口“Command Window”下键入“Simulink”后回车,则打开相应的系统模型库;或者点击工具栏上的“Simulink”图标,进入系统仿真模型库,然后点击左上角“新文件”图标,打开模型编辑窗口。
1.2 调出模块在系统仿真模型库中,把要求的模块都放置在模型编辑窗口里面。
从信号源模块包(Sources)中拖出1个阶跃信号(step)和1个白噪声信号发生器(band-limited white noise);从数学运算模块包(Math Operations)中拖出1个比例环节(gain)和1个加法器(sum);从连续系统典型环节模块包(Continuous) 中拖出1个微分环(Derivative)和3个传函环节(transfer Fcn);从信号与系统模块包(Signals Routing) 拖出1个汇流排(mux);从输出模块包(Sinks)中拖出1个示波器(scope);所有模块都放置在模型编辑窗口里面。
1.3 模块参数设置(鼠标左键双击各典型环节,则可进行参数设置)双击打开白噪声信号发生器,设定功率(Noise power)为0.0001,采样时间(Sample time)为0.05。
打开比例环节,设定比例增益为2;打开3个传函环节(transfer Fcn),通过参数设定,分别构成积分、惯性和二阶环节。
自控仿真实验报告

一、实验目的1. 熟悉MATLAB/Simulink仿真软件的基本操作。
2. 学习控制系统模型的建立与仿真方法。
3. 通过仿真分析,验证理论知识,加深对自动控制原理的理解。
4. 掌握控制系统性能指标的计算方法。
二、实验内容本次实验主要分为两个部分:线性连续控制系统仿真和非线性环节控制系统仿真。
1. 线性连续控制系统仿真(1)系统模型建立根据题目要求,我们建立了两个线性连续控制系统的模型。
第一个系统为典型的二阶系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]第二个系统为具有迟滞环节的系统,其开环传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)(s+3)} \](2)仿真与分析(a)阶跃响应仿真我们对两个系统分别进行了阶跃响应仿真,并记录了仿真结果。
(b)频率响应仿真我们对两个系统分别进行了频率响应仿真,并记录了仿真结果。
(3)性能指标计算根据仿真结果,我们计算了两个系统的性能指标,包括上升时间、超调量、调节时间等。
2. 非线性环节控制系统仿真(1)系统模型建立根据题目要求,我们建立了一个具有饱和死区特性的非线性环节控制系统模型。
其传递函数为:\[ W_k(s) = \begin{cases}1 & |s| < 1 \\0 & |s| \geq 1\end{cases} \](2)仿真与分析(a)阶跃响应仿真我们对非线性环节控制系统进行了阶跃响应仿真,并记录了仿真结果。
(b)相轨迹曲线绘制根据仿真结果,我们绘制了四条相轨迹曲线,以分析非线性环节对系统性能的影响。
三、实验结果与分析1. 线性连续控制系统仿真(a)阶跃响应仿真结果表明,两个系统的性能指标均满足设计要求。
(b)频率响应仿真结果表明,两个系统的幅频特性和相频特性均符合预期。
2. 非线性环节控制系统仿真(a)阶跃响应仿真结果表明,非线性环节对系统的性能产生了一定的影响,导致系统响应时间延长。
自动控制实验-典型环节的模拟研究
实验一 典型环节的模拟研究一.实验目的1.通过搭建典型环节模拟电路,熟悉并掌握自动控制综合实验台的使用方法。
2.通过对典型环节的软件仿真研究,熟悉并掌握ACES 软件的使用方法。
3.了解并掌握各典型环节的传递函数及其特性,观察和分析各典型环节的响应曲线,掌握电路模拟和软件仿真研究方法。
二.实验内容1.搭建各种典型环节的模拟电路,观测并记录各种典型环节的阶跃响应曲线。
2.调节模拟电路参数,研究参数变化对典型环节阶跃响应的影响。
3.运行ACES 软件中的软件仿真功能,完成各典型环节阶跃特性的软件仿真研究,并与模拟电路观测的结果作比较。
三.实验步骤在实验中观测实验结果时,可选用普通示波器,也可选用本实验台上的虚拟示波器。
如果选用虚拟示波器,只要运行ACES 程序,选择菜单列表中的相应实验项目,再选择开始实验,就会打开虚拟示波器的界面,点击开始即可使用本实验台上的虚拟示波器CH1、CH2两通道观察被测波形。
具体用法参见用户手册中的示波器部分。
1.观察比例环节的阶跃响应曲线 实验中所用到的功能区域:阶跃信号、虚拟示波器、实验电路A1、实验电路A2。
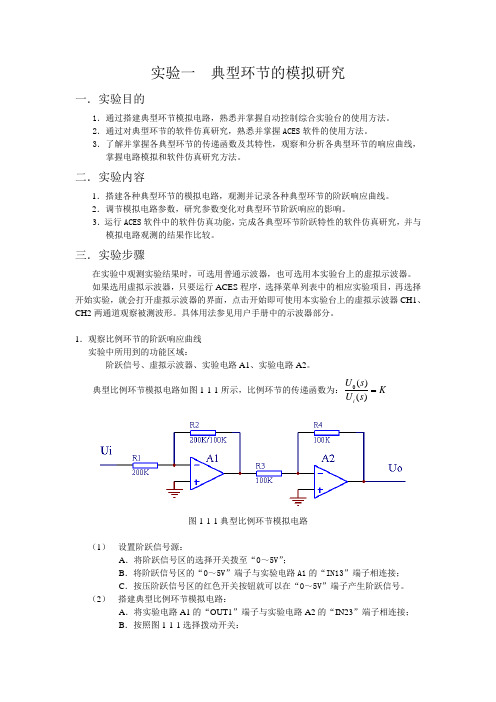
典型比例环节模拟电路如图1-1-1所示,比例环节的传递函数为:0()()i U s K U s图1-1-1典型比例环节模拟电路(1) 设置阶跃信号源:A .将阶跃信号区的选择开关拨至“0~5V ”;B .将阶跃信号区的“0~5V ”端子与实验电路A1的“IN13”端子相连接;C .按压阶跃信号区的红色开关按钮就可以在“0~5V ”端子产生阶跃信号。
(2) 搭建典型比例环节模拟电路:A .将实验电路A1的“OUT1”端子与实验电路A2的“IN23”端子相连接;B .按照图1-1-1选择拨动开关:K=1时:将A1的S6、S13拨至开的位置,将A2的S7、S11拨至开的位置; K=0.5时:将A1的S6、S14拨至开的位置,将A2的S7、S11拨至开的位置。
(3) 连接虚拟示波器:将实验电路A2的“OUT2”与示波器通道CH1相连接。
(最新版)自动控制原理MATLAB仿真实验报告
实验一 MATLAB及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;二、预习要点1、系统的典型响应有哪些?2、如何判断系统稳定性?3、系统的动态性能指标有哪些?三、实验方法(一)四种典型响应1、阶跃响应:阶跃响应常用格式:1、;其中可以为连续系统,也可为离散系统。
2、;表示时间范围0---Tn。
3、;表示时间范围向量T指定。
4、;可详细了解某段时间的输入、输出情况。
2、脉冲响应:脉冲函数在数学上的精确定义:其拉氏变换为:所以脉冲响应即为传函的反拉氏变换。
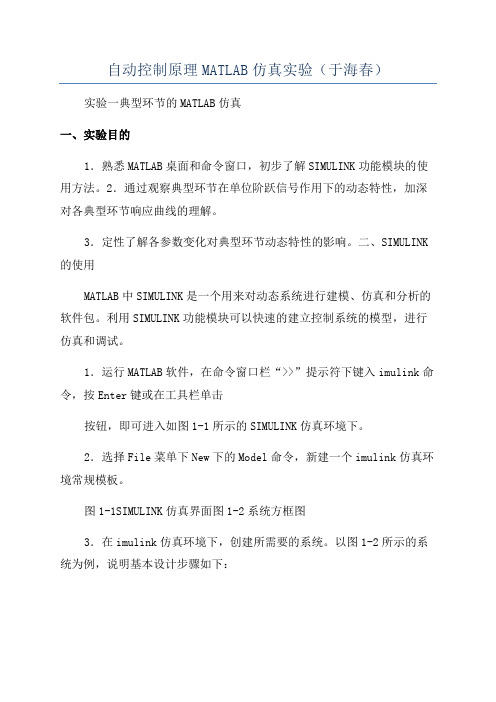
脉冲响应函数常用格式:①;②③(二)分析系统稳定性有以下三种方法:1、利用pzmap绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den) 运行结果: p =-1.7680 + 1.2673i -1.7680 - 1.2673i 0.4176 + 1.1130i 0.4176 - 1.1130i -0.2991P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
自动控制原理MATLAB仿真实验(于海春)
自动控制原理MATLAB仿真实验(于海春)实验一典型环节的MATLAB仿真一、实验目的1.熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、SIMULINK 的使用MATLAB中SIMULINK是一个用来对动态系统进行建模、仿真和分析的软件包。
利用SIMULINK功能模块可以快速的建立控制系统的模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提示符下键入imulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK仿真环境下。
2.选择File菜单下New下的Model命令,新建一个imulink仿真环境常规模板。
图1-1SIMULINK仿真界面图1-2系统方框图3.在imulink仿真环境下,创建所需要的系统。
以图1-2所示的系统为例,说明基本设计步骤如下:1)进入线性系统模块库,构建传递函数。
点击imulink下的“Continuou”,再将右边窗口中“TranferFen”的图标用左键拖至新建的“untitled”窗口。
2)改变模块参数。
在imulink仿真环境“untitled”窗口中双击该图标,即可改变传递函数。
其中方括号内的数字分别为传递函数的分子、分母各次幂由高到低的系数,数字之间用空格隔开;设置完成后,选择OK,即完成该模块的设置。
3)建立其它传递函数模块。
按照上述方法,在不同的imulink的模块库中,建立系统所需的传递函数模块。
例:比例环节用“Math”右边窗口“Gain”的图标。
4)选取阶跃信号输入函数。
用鼠标点击imulink下的“Source”,将右边窗口中“Step”图标用左键拖至新建的“untitled”窗口,形成一个阶跃函数输入模块。
5)选择输出方式。
自动控制原理实验一 典型环节的电路模拟与软件仿真
实验一 典型环节的电路模拟与软件仿真一、实验目的1.熟悉THSSC-4型信号与系统·控制理论·计算机控制技术实验箱及上位机软件的使用;2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THSSC-4型信号与系统·控制理论·计算机控制技术实验箱;2.PC 机一台(含上位机软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线;3.双踪慢扫描示波器一台(可选); 三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响;3.在上位机仿真界面上,填入各典型环节数学模型的实际参数,据此完成它们对阶跃响应的软件仿真,并与模拟电路测试的结果相比较。
四、实验原理自控系统是由比例、积分、微分、惯性等环节按一定的关系组建而成。
熟悉这些典型环节的结构及其对阶跃输入的响应,将对系统的设计和分析是十分有益的。
本实验中的典型环节都是以运放为核心元件构成,其原理框图 如图1-1所示。
图中Z 1和Z 2表示由R 、C 构成的复数阻抗。
1.比例(P )环节 图1-1比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。
它的传递函数与方框图分别为:K S U S U S G i O ==)()()(当U i (S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2所示。
图1-22.积分(I )环节积分环节的输出量与其输入量对时间的积分成正比。
它的传递函数与方框图分别为:TsS U S U s G i O 1)()()(==设U i (S)为一单位阶跃信号,当积分系数为T 时的响应曲线如图1-3所示。
图1-33.比例积分(PI)环节比例积分环节的传递函数与方框图分别为:)11(11)()()(21211212CSR R R CS R R R CS R CS R S U S U s G i O +=+=+==其中T=R 2C ,K=R 2/R 1设U i (S)为一单位阶跃信号,图1-4示出了比例系数(K)为1、积分系数为T 时的PI 输出响应曲线。
自动控制原理的仿真实验
功能 光标上移一行 删除光标前一个字符 光标下移一行 删除光标后一个字符 光标左移一个字符 光标移到行尾 光标右移一个字符 删除一行 光标右移一个单词 光标移到行首 光标左移一个单词 从光标处删除到行尾
自动控制原理实验教程
MATLAB的帮助系统 (1)使用联机帮助窗口 (2)使用帮助命令help,查找已知命令的使用方法 。 (3)使用lookfor命令,通过一般关键词找到命令和帮助标 题。 (4)演示帮助 在命令窗口执行demos命令
(4)学会使用Simulink模型结构图化简复杂控制系统模型的方法。
2014-6-25
自动控制原理实验教程
二、控制系统模型的建立
控制系统常用的数学模型有四种:传递函数模型(tf对 象)、零极点增益模型(zpk对象)、结构框图模型和状 态空间模型(ss对象)。经典控制理论中数学模型一般 使用前三种模型,状态空间模型属于现代控制理论范畴。 1、传递函数模型(也称为多项式模型) 连续系统的传递函数模型为:
K为系统增益,
z1,z2,…,zm为系统零点,
p1,p2,…,pn为系统极点。
在MATLAB中,用向量z,p,k构成矢量组 [ z, p, k ] 表示系 统。即z = [ z1, z2 ,…,zm ] ,p = [ p1, p2,…, pn ] ,k = [ k ]
用函数命令zpk ( ) 来建立系统的零极点增益模型,其函 数调用格式为: sys = zpk ( z, p, k )
b0 s m b1 s m1 ... bm num(s) G( s ) , n n 1 den(s) a0 s a1 s ... an nm
在MATLAB中用分子、分母多项式系数按s的降幂次序 构成两个向量: num = [ b0 , b1 ,…, bm ] ,den = [ a0 , a1 ,…, an]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动控制原理》MATLAB 分析与设计仿真实验任务书(2009)一.仿真实验内容及要求:1.MATLAB 软件要求学生通过课余时间自学掌握MATLAB 软件的基本数值运算、基本符号运算、基本程序设计方法及常用的图形命令操作;熟悉MATLAB 仿真集成环境Simulink 的使用。
2.各章节实验内容及要求1)第三章 线性系统的时域分析法∙ 对教材P136.3-5系统进行动态性能仿真,并与忽略闭环零点的系统动态性能进行比较,分析仿真结果;∙ 对教材P136.3-9系统的动态性能及稳态性能通过的仿真进行分析,说明不同控制器的作用; ∙ 在MATLAB 环境下完成英文讲义P153.E3.3。
∙ 对英文讲义中的循序渐进实例“Disk Drive Read System ”,在100=a K 时,试采用微分反馈使系统的性能满足给定的设计指标。
2)第四章 线性系统的根轨迹法∙ 在MATLAB 环境下完成英文讲义P157.E4.5;∙ 利用MATLAB 绘制教材P181.4-5-(3); ∙ 在MATLAB 环境下选择完成教材第四章习题4-10或4-18,并对结果进行分析。
3)第五章 线性系统的频域分析法利用MATLAB 绘制本章作业中任意2个习题的频域特性曲线; 4)第六章 线性系统的校正利用MATLAB 选择设计本章作业中至少2个习题的控制器,并利用系统的单位阶跃响应说明所设计控制器的功能。
5)第七章 线性离散系统的分析与校正∙ 利用MATLAB 完成教材P383.7-20的最小拍系统设计及验证。
∙ 利用MATLAB 完成教材P385.7-25的控制器的设计及验证。
二.仿真实验时间安排及相关事宜1.依据课程教学大纲要求,仿真实验共6学时,教师可随课程进度安排上机时间,学生须在实验之前做好相应的准备,以确保在有限的机时内完成仿真实验要求的内容; 2.实验完成后按规定完成相关的仿真实验报告; 3.仿真实验报告请参照有关样本制作并打印装订;4.仿真实验报告必须在本学期第15学周结束之前上交授课教师。
自动化系《自动控制原理》课程组 2009.08●3-5设单位反馈系统的开环传递函数为G(s)错误!未找到引用源。
试求系统在单位阶跃输入下的动态性能。
并与忽略闭环零点的系统动态性能进行比较,分析仿真结果。
0123456789100.20.40.60.811.21.4与忽略闭环零点的系统动态性能进行比较timr/seca m p l i t u d e分析:此系统在单位阶跃输入下的动态性能:峰值时间 tp=3.2s 超调量σ%=18% 调节时间 ts=8s 忽略闭环零点后的单位阶跃输入下的动态性能:峰值时间 tp= 3.7s 超调量σ%= 17% 调节时间 ts=6.67s 结论:闭环零点对系统动态性能的影响:●3-9设控制系统如图3-9所示。
要求:(1)取T1=0,T2=0.1,计算测速反馈校正系统的超调量,调节时间和速度误差;2)取T1=0.1,T2=0,计算测速反馈校正系统的超调量,调节时间和速度误差;解:(1)0123456789100.20.40.60.811.21.41.61.8(2)分析:当τ1=0,τ2=0.1时:峰值时间tp=1.06s 超调量σ%=35% 调节时间ts=4.12s 稳态误差 ess=0.2当τ1=0.1,τ2=0时:峰值时间tp=0.908s 超调量σ%=37% 调节时间ts=3.89s 稳态误差 ess=0.1结论:在一定的程度上,反馈微分控制器和比例微分控制器的动态性能和稳态性能差不多,但在相同的阻尼比的情况下,反馈微分控制器可以减小超调量,比例微分控制器使调节时间减小,峰值时间减小,响应速度加快,同时减小稳态误差。
●E3.3 A closed-loop control system is shown in Figure3.2 Determine the transfer function C(s)R(s);Determine the poles and zeros of the transfer function;Use a unit step input,R(s)=1/s,and obtain the partial fraction expansion forC(s)And the steady-state value.Plot c(t) and discuss the effect of the real and complex poles of the transfer function.012345678910-0.20.20.40.60.811.2●对英文讲义中的循序渐进实例“Disk Drive Read System”,在Ka=100时,试采用微分反馈使系统的性能满足给定的设计指标。
K a =100, G1(s)=错误!未找到引用源。
, G2(s)=错误!未找到引用源。
, R(s)=错误!未找到引用源。
1●E4.5A control systerm shown in Figure4.1 has aplantG(s)=1/[s(s-1)]1)When Gc(s)=K,show that the system is always unstable by sketching the root locus.2)WhenGc(s)=K(S+2)/(s+20),sketch the root locus and determine the range of k for which the system is stable.Determine the value of k and the complex roots when two lie on the jw-axis.解: G=tf([1 2],[1 19 -20 0]);figure(1) pzmap(G) figure(2) rlocus(G);Real AxisI m a g i n a r y A x i s解: G=tf([1],[1 10.5 30.5 48 17.5 0]);figure(1) pzmap(G) figure(2) rlocus(G);P ole-Zero M apReal AxisI m a g i n a r y A x i s-2-1.5-1-0.50.511.52Real AxisI m a g i n a r y A x i s要求:(1)绘出系统根轨迹图;并判断系统稳定性。
(2)如果改变反馈通路传递函数,使H(s)=1+2s,试判断H(s)改变后的系统稳定性。
解:(1)G=tf([1],[1 7 10 0 0]); figure(1) pzmap(G) figure(2) rlocus(G);Root LocusReal AxisI m a g i n a r y A x i sP ole-Zero M apReal AxisI m a g i n a r y A x i s实验分析:根据实验结果图得当K*由零变到无穷大时,系统始终有特征根子s 的右半面,所以系统恒不稳定●5-11绘制G (s )=错误!未找到引用源。
解:G=tf([2],[16 10 1]);figure(1) margin(G); figure(2) nichols(G);axis([-270 0 -4 40]);ngrid figure(3) nyquist(G); axis equal-60-40-2020M a g n i t u d e (d B )10-310-210-110101-180-135-90-450P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/sec) , P m = 101 deg (at 0.196 rad/sec)Frequency (rad/sec)-270-225-180-135-90-450510152025303540Nichols ChartOpen-Loop P hase (deg)O p e n -L o o p G a i n (d B )-1-0.500.51 1.52-1.5-1-0.50.511.5Nyquist DiagramReal AxisI m a g i n a r y A x i s●5-27 试验中的旋翼飞机装有一个可以旋转的机翼,当飞机速度较低时,机翼将处在正常位置;而在速度较高时,机翼将旋转到一个其他合适的位置,以便改善飞机的超音速飞行品质。
假定飞机控制系统的H(s)=1,且G(s)=错误!未找到引用源。
要求:(1)绘制开环系统的对数频率特性曲线;(2)确定幅值增益为0dB 时对应的频率ωc 和相角为180。
时对应的频率ωx 。
解:G=tf([2 4],[32 0.1 2.03125 0.1 2]);figure(1) margin(G); figure(2) nichols(G);axis([-270 0 -4 40]);ngrid figure(3) nyquist(G); axis equal-270-225-180-135-90-450510152025303540Nichols ChartOpen-Loop P hase (deg)O p e n -L o o p G a i n (d B )-1-0.500.51 1.52 2.5Nyquist DiagramReal AxisI m a g i n a r y A x i sM a g n i t u d e (d B )10-210-110101102P h a s e (d e g )Bode DiagramGm = Inf , P m = -165 deg (at 0.541 rad/sec)Frequency (rad/sec)实验分析:截止频率ωc=1.6rad/s,穿越频率ωx=7.7rad/s 。
●6-5设单位反馈系统的开环传递函数为G 0(s)=8/s(2s+1)若采用滞后-超前校正装置Gc(s)=(10s+1)(2s+1)/(100s+1)(0.2s+1)对系统进行串联校正,试绘制系统校正前后的对数幅频渐近特性,并计算系统校正前后的相角裕度解:(1)校正前:G0=zpk([],[0 -0.5],4); figure bode(G0); grid校正前系统的图-40-200204060M a g n i t u d e (d B )10-210-110101-180-135-90P h a s e (d e g )Bode DiagramFrequency (rad/sec)(2)校正后G0=zpk([],[0 -0.5],4); num=conv([10 1],[2 1]); den=conv([100 1],[0.2 1]); Gc=tf(num,den); G=series(G0,Gc); figure bode(G); grid校正后的系统:Frequency (rad/sec)-100-50050100150M a g n i t u d e (d B )10-410-310-210-110101102-180-135-90P h a s e (d e g )●6-22 已知:G0(s )=错误!未找到引用源。