对心曲柄滑块机构计算
滑块行程计算
3.6.1 按给定滑块行程的曲柄滑块机构设计解析法设计平面连杆机构的首要任务是:建立机构尺寸参数与给定运动参数的方程式。
不同的运动要求,所建立的方程式也就不同。
然后应用不同的数学方法和解算工具去求解方程式中的尺寸参数。
由上看出,同图解法设计一样,解析法设计随着机构类型不同和运动要求不同,也没有统一的方法可以套用。
求解尺寸参数时,同样也会出现有唯一解或无穷多解或无解的情况。
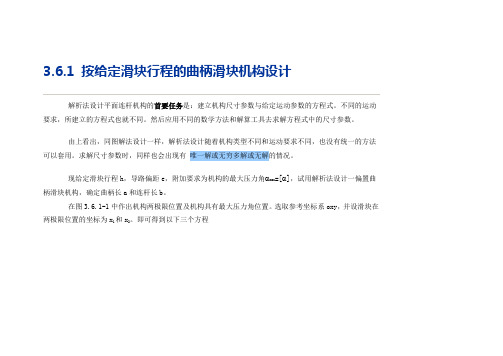
现给定滑块行程h,导路偏距e,附加要求为机构的最大压力角αmax=[α],试用解析法设计一偏置曲柄滑块机构,确定曲柄长a和连杆长b。
在图3.6.1-1中作出机构两极限位置及机构具有最大压力角位置。
选取参考坐标系oxy,并设滑块在两极限位置的坐标为x1和x2。
即可得到以下三个方程图3.6.1-1(3.6.1-1)再根据机构具有最大压力角的位置,还可得到以下关系式:为计算方便,设,则上式变为(3.6.1-2) 在式(3.6.1-1)和(3.6.1-2)中共有四个方程,恰好能解四个待求的尺寸参数a、b、x1和x2。
为解方程可先作消元处理,将式(3.6.1-2)代入式(3.6.1-1)消去b,在式(3.6.1-1)中消去x2,得(3.6.1-3)(3.6.1-4)的二次方程组,但要解这个方程组就会导出一个四次方程,而解由此得到含有两个待求参数a和x1足够精确的近似解。
具体步骤如这个四次方程是较困难的。
为此可采用近似计算方法中迭代法来解出a和x1下:第一次迭代,先选择一个a的初始值,代入式(3.6.1-4)中求得第一次近似值。
然后将和代入式(3.6.1-3)中,一般不能满足此式,会出现误差,即第二次迭代,先确定a的变化步长,从而获得第二次迭代的a值为,将代入式(3.6.1-4)中求得。
然后将和代入式(3.6.1-3)中得第二次迭代的误差。
依次类推,第三次迭代直至第n次迭代。
若给定一个足够小的允许的误差值 ,经过n次迭代后,所得误差时,迭代计算就可以结束,对应的和值即为可取的近似值,然后由式(3.6.1-2)求得连杆长b。
曲柄滑块机构的运动精度分析与计算
曲柄滑块机构的运动精度分析与计算宋亮;赵鹏兵【摘要】曲柄滑块机构是一种典型的四连杆机构,尽管设计时理论计算可以达到很高的精度,但是由于构件的制造误差及运动副的配合间隙等因素,会使机构在运动中产生输出误差,有时还会显著超出机构设计的允许误差.依据概率统计的相关理论进行机构设计,即考虑构件制造尺寸的随机误差,以保证机构运动的精度在允许的误差范围内.利用MATLAB进行仿真计算和实例研究,得出了理论设计和精度分析的计算结果.该方法准确、效率高、而且适合其它类型的机构设计,具有较大的工程实际应用价值.%Slider-crank mechanism is a typical four-bar linkage, in spite of the high precision when it' s calculated theoretically. The manufacturing error and kinematic pair clearance of the components will lead to the output error during the motion of the mechanism. Sometimes,it will significantly exceed the tolerance of the design. According to the probability and statistics theory, the mechanism is designed, that' s considering the random error of the component to make sure that the motion accuracy is in the allowed error range. Utilizing MATLAB to simulate and calculate based on case studies. and the theoretical design and accuracy analysis are obtained. This method is accurate and very efficiently, it also can be used in other kind of mechanism design, and it has much more practical value in engineering.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)010【总页数】5页(P2201-2205)【关键词】曲柄滑块机构;运动学;概率设计;等影响法;精度分析【作者】宋亮;赵鹏兵【作者单位】海军装备部,西安,710043;西北工业大学现代设计与集成制造技术教育部重点实验室,西安,710072【正文语种】中文【中图分类】TH112.1曲柄滑块机构是一种单移动副的四连杆机构,如图1和图2所示,分别为对心和偏心曲柄滑块机构。
曲柄滑块机构中滑块最大速度的位置探讨_刘善林

继续植毛
板刷弹出 产量+1
Y 停机等待处理
N
处理完否?
Y
更换毛色否?
N
剩余孔倒计数
Y 更换毛色
N 为零吗?
Y
主轴停转
图 2 控制软件流程图
以下为读取某一刷型植毛文件的程序代码:
Dim jj As Integer, ii As Integer Open FileName For Input As #1 Input #1, Mode_num For jj = 1 To Mode_num Input #1, Number(jj), Maxdistance(jj), MaxDefaultDistance(jj) Input #1, X_mode_dis(jj), Y_mode_dis(jj), Z_mode_dis(jj),
-88.90 -88.41 -86.78 -84.38
从表 1 可以得出以下结论: (1)对于偏置的曲柄滑块机构,滑块 C 的最大 速度出现在曲柄与连杆相互垂直处; (2)对于对心的曲柄滑块机构,滑块 C 的最大
速度一般不出现在曲柄与连杆相互垂直处。随着杆 长比 λ 的增大,滑块 C 在最大速度处曲柄与连杆越 接近 90° ,当 λ ≥5 时,可以认为滑块 C 的最大速度 出现在曲柄与连杆的夹角 α = 90° 时的位置。但随着 λ 的增大,滑块的最大速度值会减小,如图 2 所示。
曲柄滑块机构分析

Fx
A
60
B Fy
求解过程:
第一步:以曲柄1为研究对象进行受力分析,如图 所示:
X方向:F21*cos(60)+Fx+F=0 Y方向:Fy+F21*sin(60)=0 转矩平衡方程:F*OA-F21*OB*sin(60)=0 三个未知量,三个方程,则可求解得到F21,即 曲柄对连杆的作用力。
7
F4 F’x
D.其他情况
13
扩展1:曲柄滑块机构
M B
A C
D
14
扩展2:当杆长发生变化时,弹簧力会发生什 么变化?
D
F
D
F
200 100 B
A
C
500 100 B
A
C
D
F
200 100 B
A
C
15
课后作业2:教材P77,课后习题4
图2-128所示为曲柄导杆机构。已知曲柄长为 a=100mm,曲柄回转中心A与导杆摆动中心C的 距离为b=200mm。曲柄以ω=36(°)/s的角速 度匀速转动。 (1)试建立该曲柄导杆机构的虚拟样机模型。 (2)仿真机构的虚拟样机模型,并测量获取导杆 角度、角速度和角加速度的变化规律; (3)试根据仿真分析结果,计算求取机构的行程 速比系数
16
课后作业1:教材P77,课后习题5
在图2-129所示的对心曲柄滑块机构,已知曲柄为 100cmx10cmx5cm的钢质杆,连杆为200cmx10cmx5cm的用在曲柄上的 驱动力矩为M1=20N.m。 (1)试建立该曲柄滑块机构的虚拟样机模型; (2)请仿真机构的虚拟样机模型,并测量获取滑块3在0s-20s运 动时间内的位移、速度和加速度的变化规律。
曲柄滑块机构分析
曲柄滑块机构的运动分析及应用解读

机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:刘泽陆(********)陈柯宇(11071177)熊宇飞(11071174)张保开(11071183)班级:1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块机构的运动分析及应用
机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:泽陆(11071182)柯宇 (11071177)熊宇飞(11071174)保开 (11071183)班级: 1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
曲柄滑块四杆机构压力角传动角的定义及其计算课件
传动角定义及作用
定义
在平面连杆机构中,主动件与从动件开始相对运动时的两个共线位置之间的夹角。
作用
衡量机构的传动性能,传动角越大,机构的传动性能越好,效率越高。
影响压力角和传动角的因素
01
曲柄长度
02
连杆长度
03
滑块位置
04
压力角传动角计算方法论述
压力角计算方法
定义
计算公式 注意事项
传动角计算方法
定义
传动角是指在曲柄滑块四杆机构 中,主动件通过连杆传递给从动 件的力的方向与从动件运动方向
之间所夹的锐角。
计算公式
传动角γ可通过余弦函数计算, γ=arccos((lAB^2+lBC^2-
lAC^2)/(2lAB·lBC)),其中lAB、 lBC和lAC分别为曲柄、连杆和滑
块的长度。
注意事项
在计算传动角时,需确保所取角 度为锐角,并注意机构的运动方
实验目的
验证曲柄滑块四杆机构压力角传动角的定义,探究机构运动过程中压力角和传动角的变化规律,提高理论知识的 实践应用能力。
方案制定
搭建曲柄滑块四杆机构实验台,通过调整机构参数和运动速度,采集不同位置下的压力角和传动角数据,进行对 比分析。
数据采集与整理方法论述
数据采集方法
采用光电传感器和角度传感器实时采集 机构运动过程中的压力角和传动角数据, 确保数据的准确性和实时性。
曲柄滑块四杆机构定义
01
02
03
04
块四杆机构工作原理
旋转运动转换为直线运动
传动比与行程速度变化
曲柄滑块四杆机构类型
对心曲柄滑块机构 偏置曲柄滑块机构
03
压力角传动角概念及影响因素
《机械动力学答案》
A、急停阶段 B、启动阶段 C、稳定运转阶段 D、停车阶段 72、在动力分析中,主要涉及的力是( ) 。 A、驱动力 B、重力 C、摩擦力 D、生产阻力 73、以下选项中,与等效力有关的是( ) 。 A、外力 B、传动比 C、ωj/v D、vk/v 74、以下选项中,与等效力矩有关的是( ) 。 A、外力据 B、传动比 C、ωj/ω D、vk/ω 75、以下选项中,可归为阻尼的有( ) 。 A、物体的内力 B、物体表面间的摩擦力 C、周围介质的阻力 D、材料的内摩擦 四、填空题(每空 2 分,共 30 空,共 60 分) 76、从惯性载荷被平衡的程度看,平衡可分为 、 和 。 77、机械动力学的分析方法按功能分类可分为 和 。 78、动力学的分析方法按水平分类,可分为 、 、 和 。 79、用质量再分配实现摆动力的完全平衡,其分析方法主要有 、 、 和 。 80、机械系统运转的全过程可分为 、 和 这几个阶段。 81、机器人动力学是机器人 、 和 的基础。 82、工业机器人通常由 、 、 和 组成。 83、二自由度系统的等效转动惯量是系统的 、 、 和 的函数。 84、实现摆动力完全平衡的方法有 、 和 。 76、部分平衡、完全平衡、优化综合平衡 77、动力学反问题、动力学正问题 78、静力分析、动态静力分析、动态分析、弹性动态分析 79、广义质量代换法、线性独立矢量法、质量矩替代法、有限位置法 80、启动阶段、稳定运转阶段、停车阶段 81、操作机设计、控制器设计、动态性能分析 82、执行机构、驱动装置、控制系统、传感系统 83、时间、惯性参数、几何参数、广义坐标 84、加配重、合理布置机构、设置附加机构 五、计算题(第 85、86 题各 30 分,第 87 题 10 分,第 88 题 20 分,共 90 分) 85、如图所示为一对心曲柄滑块机构。曲柄以转速度 ω1 作等速回转运动,曲柄与水平方 向夹角为 θ1 ,曲柄长度为 r ,质心与其回转中心 A 重合。连杆长度 l ,连杆与水平方向夹 角为 θ 2 ,连杆质心 S2 到铰链 B 的距离 BS 2 = L ,连杆质量 m 2 ,对其质心的转动惯量 J 2 。 滑 块质量 m3 ,其质心与铰链 C 重合。1)画出曲柄、连杆和滑块的受力分析图;2)写出曲 柄、连杆和滑块的平衡方程。
对心曲柄滑块机构的极位夹角
心曲柄滑块机构极位夹角的影响因素及调整
方法
心曲柄滑块机构是一种常用的传动机构,其工作原理是通过曲柄的旋转,带动杆杆的上下运动,实现运动传递。
而极位夹角是心曲柄滑块机构中一个重要的参数,它对机构的运动稳定性及效率都有很大影响。
下面将从影响因素及调整方法两个方面来详细介绍:
一、影响因素
1.连杆长度:连杆长度的改变会直接影响极位夹角,因此在设计中应尽量考虑到其影响。
2.偏心距:偏心距是指连杆中心到曲柄中心的距离。
偏心距增大会使得极位夹角变小,导致运动不稳定。
3.摩擦力:机构运动过程中的摩擦力也会影响极位夹角。
摩擦力越大,极位夹角越小。
二、调整方法
1.调整连杆长度:通过改变连杆长度来调整极位夹角。
一般情况下,增加连杆长度可以增大极位夹角。
2.调整偏心距:在设计时尽量使偏心距减小,或者通过增大曲柄半径的方式来减小偏心距。
3.减少摩擦:采用优质材料,合理设计机构的润滑部位,可以有效地减少机构的摩擦,从而提高极位夹角。
综上所述,了解心曲柄滑块机构极位夹角的影响因素及调整方法能够有效提高传动效率和稳定性,提高机构的工作效果。
对心式曲柄滑块机构
偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0右极限位置偏心距e=0左极限位置右极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置偏心距e=0 右极限位置左极限位置。