基于单片机的电动车控制器
基于单片机的电动自行车控制器设计

① 收 稿 日期 :2017—03—20 作者简介 :何全陆(1960一),男 ,安徽芜湖人 ,高级专利工程师 ,副教授 ,研 究方 向 :知识产权 和机械设计 。
第 3期
何 全 陆 :基 于单 片机 的 电动 自行 车控 制 器设 计
407
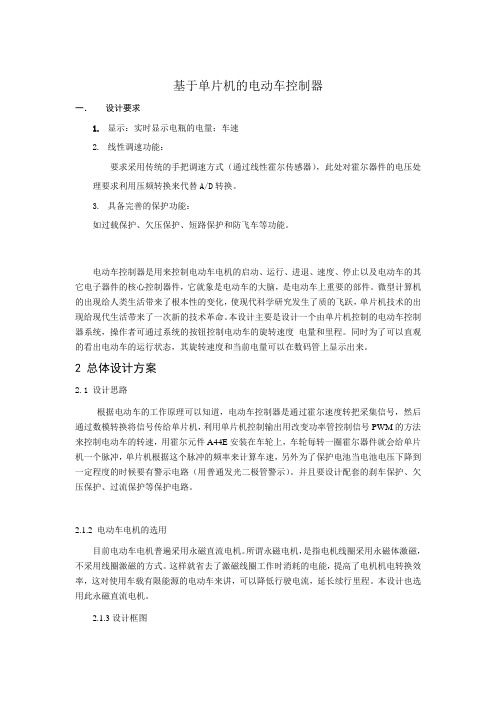
图 2 无刷直流电机控制系统
2 硬件 电路设计
中图分 类 号 : TP332
文献 标识 码 : A
O 引 言
随着 经济 和科技 的快 速 发展 ,人 民生 活水平 的 提 高 ,电动 自行 车逐 渐取 代人 力 自行 车 ,以其轻 巧 、 方 便 、环保 等优 点 受 到 人们 的青 睐 ,成 为 当前 社 会 人 们 主要 的代 步工具 。当前 主 流 的 电动 自行 车 ,电 动 摩托 车 大都是 通 过直 流供 电 ,对 无刷 直 流 电机 进 行 控制 ,通 过对 电源 电压 的调 节 实现对 无 刷直 流 电 机 的速 度控 制 。 电动 自行 车 主要 有 车身 、电机 、电 源和控 制 器组 成 。 电动 自行 车 控 制 器按 照功 率 的 大小 可分 为 :小 功率 、中功 率 、大 功 率 三类 ,电动 自 行 车 一般 使用 小功 率 的 ,货运 三 轮车 和 电动摩 托 车 使 用 中功 率和 大 功 率 的 。 电动 自行 车 的控 制 器 是 电动 自行 车 的大 脑 ,控 制 电 动 自行 车 各 种 运 动 状 态 ,控 制器 的好 坏 直 接 影 响 着 电 动 自行 车 的工 况 , 因此研 发 一款 高性 能 、低 耗 能 、使 用 方便 的 电动 自 行 车控 制 器是 当务 之急 。
CPU),程 序 和 数 据 分Leabharlann 别 进 行 存 储 ,速 度 可 达
基于单片机的电动车控制器
基于单片机的电动车控制器一.设计要求1.显示:实时显示电瓶的电量;车速2.线性调速功能:要求采用传统的手把调速方式(通过线性霍尔传感器),此处对霍尔器件的电压处理要求利用压频转换来代替A/D转换。
3.具备完善的保护功能:如过载保护、欠压保护、短路保护和防飞车等功能。
电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。
微型计算机的出现给人类生活带来了根本性的变化,使现代科学研究发生了质的飞跃,单片机技术的出现给现代生活带来了一次新的技术革命。
本设计主要是设计一个由单片机控制的电动车控制器系统,操作者可通过系统的按钮控制电动车的旋转速度电量和里程。
同时为了可以直观的看出电动车的运行状态,其旋转速度和当前电量可以在数码管上显示出来。
2 总体设计方案2.1 设计思路根据电动车的工作原理可以知道,电动车控制器是通过霍尔速度转把采集信号,然后通过数模转换将信号传给单片机,利用单片机控制输出用改变功率管控制信号PWM的方法来控制电动车的转速,用霍尔元件A44E安装在车轮上,车轮每转一圈霍尔器件就会给单片机一个脉冲,单片机根据这个脉冲的频率来计算车速,另外为了保护电池当电池电压下降到一定程度的时候要有警示电路(用普通发光二极管警示)。
并且要设计配套的刹车保护、欠压保护、过流保护等保护电路。
2.1.2 电动车电机的选用目前电动车电机普遍采用永磁直流电机。
所谓永磁电机,是指电机线圈采用永磁体激磁,不采用线圈激磁的方式。
这样就省去了激磁线圈工作时消耗的电能,提高了电机机电转换效率,这对使用车载有限能源的电动车来讲,可以降低行驶电流,延长续行里程。
本设计也选用此永磁直流电机。
2.1.3设计框图如下图1。
图1总设计框图3 设计原理分析3.1、硬件设计本设计的硬件电路主要包括最小系统、时速控制电路、显示电路、驱动电路四大部分组成。
采用PICl6F72单片机的电动车无刷电机控制器软件设计
采用PICl6F72单片机的电动车无刷电机控制器软件设计1.无刷电机控制器的基本要求(1)功能性要求:1)电子换相,2)无级调速,3)刹车断电,4)附加功能(包括;a.限速,b.1+l助力,c.EBS柔性电磁刹车,d.定速巡航,e.消除换相噪音,倒车等)。
(2)安全性要求:1)限流驱动,2)过流保护,3)堵转保护,4)电池欠压保护,5)节能和降低温升,6>附加功能(防盗锁死,温升限制等),7.附加故障检测功能。
从上面的要求来看,功能性要求和安全性荽求的前三项,用专用的无刷电机驱动芯片加上适当的外围电路均不难解决,代表芯片是M C33035,早期的控制器方案均用该集成块解决。
但后来随着竞争加剧,很多厂商都增加了不少俯加功能,一些附加功能用硬件来实现就比较困难,所以使用单片机来做控制的控制器迅速取代了硬件电路芯片。
控制的反应速度仅仅受限于逻辑门的开关速度,而软件的运行则需要时间。
要使软件跟得上电机控制的需求,就必须要求软件在最短的时间内能够正确处理换相、电流限制等各种复杂动作,这就涉及到一个对外部信号的采样频率、采样时机、信号的内部处理判断及处理结果的输出,还有一些抗干扰措施等,这些都是软件设计中需要再三仔细考虑的。
PICl672是一款具有2k字长的FLASH程序空间,22个可用I/O 口。
同时又附加了3个定时/计数器、5个8位A/D口、1个比较/捕捉,脉宽调制器、8个中断源,这些优异的性能为电动车控制器控制提供了良好的硬件环境和软件基础。
要使无刷电机转起来,并且听从驾驶者的调速、刹车等基本指挥。
最基本的要求就是要实现硬件所能实现的电子换向和调速、刹车等功能。
实际上软件的整体设计也和硬件一样,也是一个模块化堆砌的过程,问题在于模块的合理化堆砌,使堆砌后形成的整体能够坚固、协调、高效率运行。
这里先说一说各种模块功能的简单实现,然后再来讨论如何使这些模块协调运转。
2.电子换相模块无刷电机,顾名思义就是没有了电刷,不能自动换向,因此要依靠传感器检测转手的位置、用电子开关来改变线圈中电流的方向。
基于单片机的电动车控制系统设计

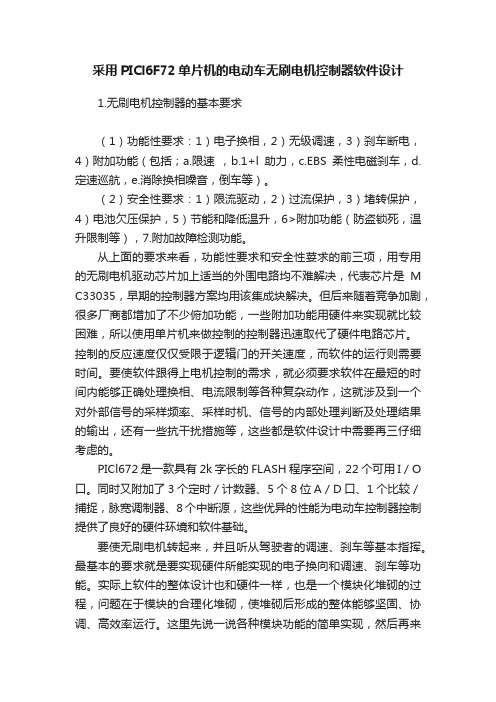
图 3 无刷直流电动机控制系统功率主电路
控制器电路由微控制核心 PIC16F72 单片机、逻辑保 护门 74LS00 和 +5V 电源电路构成,附加电路包括电源滤 波电路、位置传感器信号采集电路、电池电压降压监测电 路、微控制器时钟振荡电路和上电复位电路构成;同时电 路向外提供各种输入和输出接口:助力传感器接口 fSen-
社,2006. [4]高湘.给水工程技术及工程实例 北京:化学工业
出版社,2002. [5]谌永红.给水排水工程 北京:中国环境科学出版
社,2008. (收稿日期:2008-08-27)
的调速设备价格较为昂贵,一次性投资较大,因此当管网
《湖北农机化》2008 年第 5 期 25
开发与研究
号的状态与电机的固定序列进行比较,以判断换相的正确 性;MOSFET 驱动电路由 IR2103 把上管和下管控制信号 进行放大,驱动大功率管。
年可节省电费成本支出约 94 万元。保守一点算,一年也
可节省电费成本支出约 45.3 万元。
参考文献
3 结论
[1]关醒凡.现代泵技术手册[M] .北京:航宇出版社,
怀化市一水厂送水泵站中改造费用主要是更换 5 台 水泵,即 4 台 24SAP-14B 型泵和 1 台 350S44A 型泵。购 买 5 台泵所需费用约为 35 ̄40 万元,也就是说,改造一年 时间内节省的电费成本即基本可收回投入的改造费用。因 此,正确合理选择送水泵站的水泵和供水方式,采取最大 限度的节能措施,可以大幅度地降低电力消耗,最直接的 节约生产成本。
sor、速度传感器接口 SP、速度限定接口 SE,a 相位传感 器输入接口 aSensor,b 相位传感器输入接口 bSensor,c 相 位传感器输入接口 cSensor、一个模式开关接口 KMOD、 刹车开关接口 kBRK、面板接口 Panel。本系统还设置了过 压、欠压、过流、过热等保护环节,并根据简单可靠原则 设计了系统具体的保护电路。
基于单片机的电动车控制系统设计毕业设计;

毕业设计题目:基于单片机的电动车控制系统设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于单片机的电动车速度控制系统

系统软件设计
速度检测子程序
通过光电编码器或霍尔传感器 读取速度信号,并进行数据处 理。
电机驱动子程序
根据控制信号调节电机的转速 ,实现速度调节。
主程序
实现系统的初始化、速度检测 和控制算法的运行。
控制算法子程序
根据速度检测值和设定值,计 算控制量,输出控制信号给电 机驱动模块。
报警子程序
当速度超过设定值时,发出警 报并提示用户。
数据分析与结果展示
数据分析
对采集到的速度数据进行处理和分析, 绘制速度变化曲线图,找出电动车速度 控制的对比不同 控制指令下的速度响应时间和稳定性。
05
CATALOGUE
结论与展望
研究结论
系统设计
成功设计了一种基于单片机的电动车 速度控制系统,实现了对电动车速度 的精确控制。
04
CATALOGUE
实验与分析
实验设备与环境
设备
电动车、速度传感器、单片机控制器、电机驱动器、电源等。
环境
室内实验场地、恒温环境、无风干扰。
实验过程与数据记录
实验过程
设定不同的速度控制指令,记录电动车在各个指令下的速度变化和稳定时间。
数据记录
使用数据采集系统实时记录速度数据,并存储到计算机中进行分析。
硬件设备
目前系统所使用的硬件设备可能存在成本较高的问 题,未来可以考虑采用更低成本的硬件方案。
应用范围
本系统目前仅用于电动车的速度控制,未来 可以扩展应用到其他领域,如机器人、无人 机等。
06
CATALOGUE
参考文献
参考文献
参考文献1
张三, 李四. (2020). 基于单片机的电动车速度控制系统设 计. 北京: 科学出版社.
基于AT89C51单片机的电动车无线遥控系统
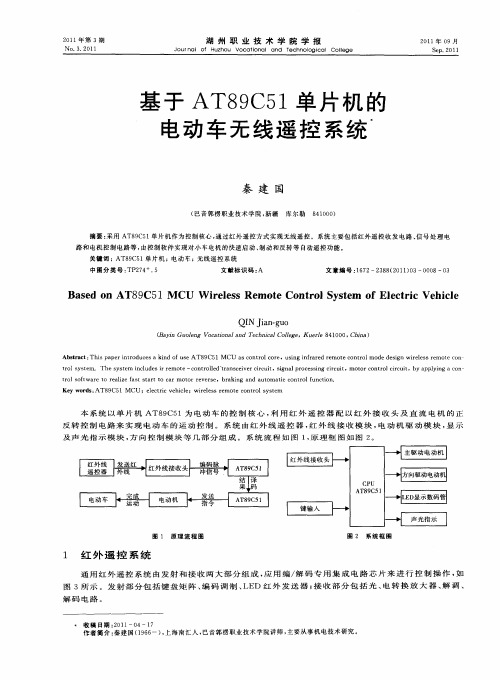
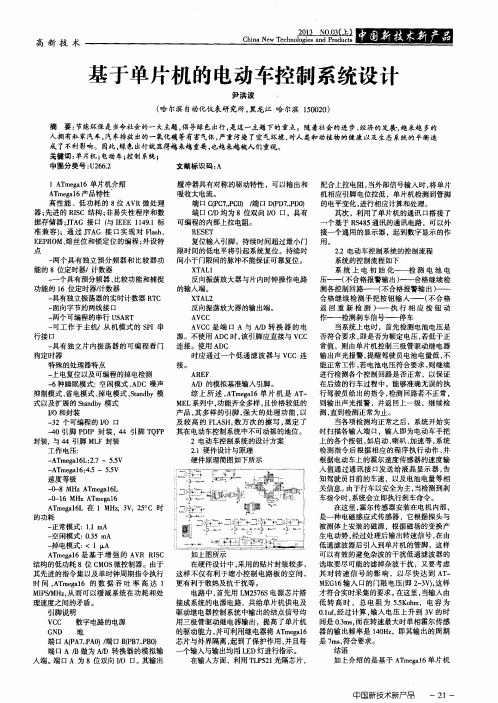
图 4 遥控编码的… ’ “” 0 和 1
—
主 驱 动 电 动机
红外 线 接 收 头 _◆
— —
方 向驱 动电 动机
CPU AT8 C51 9
—
LD E 显示 数码 管
键 输 入
—
声 光 指 示
图 1 原 理流 程 图
图 2 系统 框 图
1 红 外 遥 控 系 统
通 用 红 外 遥 控 系 统 由发 射 和 接 收 两 大 部 分 组 成 , 用 编 / 码 专 用 集 成 电 路 芯 片 来 进 行 控 制 操 作 , 应 解 如 图 3所 示 。 发 射 部 分 包 括 键 盘 矩 阵 、 码 调 制 、 D 红 外 发 送 器 ; 收 部 分 包 括 光 、 转 换 放 大 器 、 调 、 编 LE 接 电 解
Ba e n AT8 C51 M CU i e e s Re o e Co t o y t m f El c r c Ve i l sd o 9 W r l s m t n r lS s e o e t i h c e
Q NJa- o I i g nu
Se . 0 p 2 11
基 于 AT8 5 9 片 机 的 C 1单 电动 车 无 线 遥 控 系统
秦 建 国
( 巴音 郭 楞 职 业 技 术 学 院 , 疆 新 库尔勒 8 10 ) 4 0 0
摘 要 : 用 AT8C5 采 9 1单 片 机 作 为 控 制 核 心 , 过 红 外 遥 控 方 式 实 现 无 线 遥 控 。 系 统 主要 包 括 红 外遥 控 收 发 电路 、 号 处 理 电 通 信
路和电机控制电路等 , 由控制软件实现对小车电机的快速启动 、 制动和反转等 自动遥控功能。
基于单片机的电动车控制系统设计
人拥有私家汽车 , 汽车排放 出的一氧化碳等有害气 体, 严重污染了空气环境 , 对人类和动植物的健康以及生态系统的平衡造 成了不利影响。因此, 绿 色出行就显得越来越重要 , 也越 来越被人们重视 。 关键词: 单片机 ; 电动丰; 控制系统I 中圊分类号: U 2 6 6 2 变献标识码 ; A
一 一 一
空 闲模式 : 0 . 3 5 m A 掉电模式: <1 A A T m e g a l 6是 基 于增 强 的 A V R R I S C 结 构 的低 功耗 8位 C MO S 微控 制器 。由于 其 先进 的指令 集 以及单 时钟周 期指 令执 行 时间 , A T m e g a 1 6的数据吞吐率高达 1 MI P S / M H z , 从 而 可 以缓减 系统 在 功耗 和处 理 速度之 间 的矛盾 。 引脚说 明 用三极管驱动继电器输出,提高了单片机 间是 0 . 3 m s , 而在转速最大时单相霍尔传感 V C C 数字电路的电源 4 0 H z ,即其输 出的周期 G N D 地 的驱动能力 , 并可利用继电器将 A T me g a l 6 器的输 出频率是 1 端 口A f P A 7 . . P A 0 ) / 端 口B f P B 7 . . P B 0 ) 芯片与外界隔离, 起到了保护作用 , 并且每 是 7 m s , 符合要求。 结 语 端 口A f B做为 A f D 转换器的模拟输 个输入 与输 出均用 L E D灯进行 指示 。 如上 介绍 的是基 于 A T m e g a l 6单 片机 入端。 端口A 为 8位双向I / O 口。其输出 在输 入方 面 ,利用 T L P 5 2 1 光 隔芯 片 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机原理与应用课程设计报告电动车控制器专业班级:电气工程及其自动化xxx班姓名:时间: 2010.3.3—3.19 指导教师:xxxxxxxxxxxxxxxxxxxxxxxxx2010年 3 月19日基于单片机的电动车控制器一.设计要求(一)基本功能1.显示:实时显示电瓶的电量;车速2.线性调速功能:要求采用传统的手把调速方式(通过线性霍尔传感器),此处对霍尔器件的电压处理要求利用压频转换来代替A/D转换。
3.具备完善的保护功能:如过载保护、欠压保护、短路保护和防飞车等功能。
(二)扩展功能1.可增加实时的总里程显示2.速度具有一定的记忆功能二.计划完成时间三周1.第一周完成软件和硬件的整体设计,同时按要求上交设计报告一份。
2.第二周完成软件的具体设计和硬件的制作。
3.第三周完成软件和硬件的联合调试。
目录1引言 (1)2总设计方案 (1)2.1设计思路 (1)2.2单片机介绍 (1)2.3设计框图 (1)3设计原理分析 (2)3.1硬件设计 (2)3.1.1最小系统 (2)3.1.2时速控制电路 (3)3.1.3驱动电路 (4)3.1.4过流、欠压保护电路 (4)3.1.5刹车保护 (4)3.1.6显示电路 (5)3.2软件设计 (5)3.2.1主程序流程 (5)4结束语 (6)参考文献 (7)符录1 (8)符录2 (9)基于单片机控制的电动车控制器电气072班李占业摘要:本系统由单片机系统、显示系统、驱动系统和数模转换系统组成。
通过按键来控制单片机,通过P1口输出的具有时序的方波作为电动车的控制信号,使电动车的里程与转速发生变化,达到对电动车控制的目的。
该设计具有结构简单、可靠性高、使用方便、可以实现较复杂的控制、具有较大的灵活性和适应性等特点。
关键词:电动车单片机ADC0809 A44E1 引言电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。
微型计算机的出现给人类生活带来了根本性的变化,使现代科学研究发生了质的飞跃,单片机技术的出现给现代生活带来了一次新的技术革命。
本设计主要是设计一个由单片机控制的电动车控制器系统,操作者可通过系统的按钮控制电动车的旋转速度电量和里程。
同时为了可以直观的看出电动车的运行状态,其旋转速度和当前电量可以在数码管上显示出来。
2 总体设计方案2.1 设计思路根据电动车的工作原理可以知道,电动车控制器是通过霍尔速度转把采集信号,然后通过数模转换将信号传给单片机,利用单片机控制输出用改变功率管控制信号PWM的方法来控制电动车的转速,用霍尔元件A44E安装在车轮上,车轮每转一圈霍尔器件就会给单片机一个脉冲,单片机根据这个脉冲的频率来计算车速并用数码管显示出来,另外为了保护电池当电池电压下降到一定程度的时候要有警示电路(用普通发光二极管警示)。
并且要设计配套的刹车保护、欠压保护、过流保护等保护电路。
2.1.1 单片机的选用单片计算机即单片微型计算机。
(Single-Chip Microcomputer ),是集CPU ,RAM ,ROM ,定时,计数和多种接口于一体的微控制器。
随着科学技术的发展,越来越多的智能化产品都用到了单片机。
他体积小,成本低,功能强,广泛应用于智能产品和工业自动化上。
而51 单片机是各单片机中最为典型和最有代表性的一种。
本设计选用常见的AT89S51。
2.1.2 电动车电机的选用目前电动车电机普遍采用永磁直流电机。
所谓永磁电机,是指电机线圈采用永磁体激磁,不采用线圈激磁的方式。
这样就省去了激磁线圈工作时消耗的电能,提高了电机机电转换效率,这对使用车载有限能源的电动车来讲,可以降低行驶电流,延长续行里程。
本设计也选用此永磁直流电机。
2.1.3设计框图如下图1。
图1总设计框图3 设计原理分析3.1、硬件设计本设计的硬件电路主要包括最小系统、时速控制电路、显示电路、驱动电路四大部分组成。
最小系统主要是为了使单片机正常工作;控制电路主要由开关和按键组成,由操作者根据相应的工作需求进行操作;显示电路主要是为了显示电机的工作状态和转速;驱动电路主要是对单片机输出的脉冲进行功率放大,从而驱动电机转动。
3.1.1、最小系统单片机最小系统,或者称为最小应用系统,是指用最少的元件组成的单片机可以工作的系统,对51系列单片机来说,最小系统一般应该包括:单片机、复位电路、晶振电路。
复位电路通常有两种基本形式:上电复位和上电或开关复位。
上电复位要求接通电源后,自动实现复位操作。
上电或开关复位要求电源接通后,单片机自动复位,并且在单片机运行期间,用开关操作也能使单片机复位。
常用的上电或开关复位电路图3所示。
上电后,由于电容C1的充电作用,使RST持续一段时间的高电平,持续两个机器周期以上就将复位。
单片机在运行当中时,按下复位键S1后松开,也能使RST为一段时间的高电平,从而实现上电或开关复位的操作晶振电路:8031单片机的时钟信号通常用两种电路形式得到:内部振荡方式和外部振荡方式。
在引脚XTAL1和XTAL2外接晶体振荡器(简称晶振)或陶瓷谐振器,就构成了内部振荡方式。
由于单片机内部有一个高增益反相放大器,当外接晶振后,就构成了自激振荡器并产生振荡时钟脉冲。
内部振荡方式的外部电路如图3示。
其电容值一般在5-30pF。
晶振频率的典型值为12MH2,采用6MHz的情况也比较多。
内部振荡方式所得的时钟情号比较稳定,实用电路中使用较多。
如图2.。
图5 过流,欠压保护电路3.1.5 刹车保护刹车时,为避免大电流对控制器、电机、蓄电池的冲击,要求在刹车瞬间即刻关闭PWM 输出.如图6。
P1.0图6刹车保护3.1.6 显示电路四个LED显示电池电量,当电池电压不足时四个LED全亮。
两个数码管显示电动车的时速,范围0~99千米每小时。
电路如下图7。
图7显示电路3.2、软件设计实现系统功能可以采用多种方法,由于随时有可能输入加速、减速信号和方向信号,因而用中断方式效率最高,本设计主要用到外部中断0,用它来计算车轮旋转圈说,且用定时器T1来记忆固定旋转圈数所需要的时间用以计算车速。
而对于显示电池电量,和刹车保护则用查询方式。
数码管显示使用静态显示。
3.2.1主程序设计主程序中要完成的工作主要有系统初始值的设置、系统状态的显示、及驱动程序。
其中显示程序有电压过低时的警示,车速的显示。
驱动程序也就是把霍尔手柄的变动的0~5v的模拟电压信号通过AD0809转换成数字量用这个数字量作为输出脉冲高低电平的延迟子程序中的参数变量,这样就实现改变PWM占空比从而改变车速的目的。
主程序流程如图9所示。
图9主程序流程图4结束语我是出于对电动车的极大兴趣才选择这个设计课题的,通过这次的课程设计使我在各个方面都有了很大的提高。
首先,对电动车的工作原理有了一定的了解,同时在设计的过程中使我感觉到整体电路的综合调试是非常重要的,仿真正确在实际电路中却有可能不能实现。
再次要考虑到单片机不能直接控制步进电机,必须根据步进电机功率的大小合理的选择功率驱动器件。
同时在数码管显示的系统中,用到的口线较多,采用串并转换的方式可以节省口线,可以节省很多的单片机资源。
还有就是编程,学习中,小程序可以很快的编出来,通过这次实习,一次系统的编程所需要考虑到的问题,是我这次实习中的一个很大的收获。
总之,通过这次实习,我学到了很多的知识,同时也找到了一些问题。
这将为我以后的学习起到很大的帮助。
参考文献[1] 景晓松Proteus在MCS-51&ARM7系统中的应用[M]. 北京:电子工业出版社,2006[2] 蒋辉平.周国雄.单片机原理及应用技术[M]. 北京:北京航空航天大学出版社,2007[3] 王晓明.电动机的单片机控制(第二版)[M].北京:北京航空航天大学出版社,2007[4] 张大明.单片机控制实训指导及综合应用[M].北京:机械工业出版社,2007[5] 张迎新.单片机初级教程(第二版)[M].北京:北京航空航天大学出版社,2006[6] 刘玉宾.朱焕立.单片机原理及接口技术[M].北京:机械工业出版社,2004[7] 谢自美.电子线路设计实验测试(第三版)[M].武汉:华中科技大学出饭社,2006[8] 童诗白.华成英. 模拟电子技术基础(第三版) [M].北京: 高等教育出版社,2001[9] 万光毅.单片机实验与实践教程(第二版) [M].北京: 北京航空航天大学出版社,2006年,第2版[10] 李朝青. 单片机原理及接口技术(第3版)[M]. 北京: 北京航空大学出版社,2005周润景.袁伟亭.附录1 总图V附录 2 总程序HICOUNT EQU 72HLOWCOUNT EQU 71HTOCOUNT EQU 70HSCOUNT EQU 60HADC EQU 35HST BIT P1.2OE BIT P1.4EOC BIT P1.3PWM BIT P3.7ORG 0000HAJMP MAINORG 0003HAJMP INSERO主程序ORG 0030HMAIN:SETB EASETB EX0MOV P0,#00HMOV P1,#00HSETB P1.0MOV TH1,#3CHMOV TL1,#0B0HWAIT:JB P1.1,LOWPOWERJNB TF1,GOON1INC R0GOON1:CJNE R0,#0FEH,GOON2MOV 71H,#00HMOV 72H,#00HGOON2:LJMP OUTPUTSPEEDJNB P1.0,STOPCLR STSETB STJNB EOC,$SETB OEMOV ADC,P2CLR OESETB PWMMOV A,ADCLCALL DELAYCLR PWMMOV A,#255SUBB A,ADCLCALL DELAYSJMP W AIT延时子程序DELAY: MOV R6,#1D1: DJNZ R6,D1DJNZ ACC,D1RET刹车时停止PWM输出子程序STOP: CLR PWMRET电池电压过低警示子程序LOWPOWER: MOV P1,#0FEHRET电动车时速显示子程序OUTPUTSPEED:PUSH PSWPUSH ACCLJMP TOSPEEDMOV R1,LOWCOUNTMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV SBUF,AKLO:JNB TI,KLOCLR TIINC R1MOV DPTR,#TABMOVC A,@A+DPTRMOV SBUF,APOP ACCPUSH PSWRET求时速子程序TOSPEED:PUSH PSWPUSH ACCMOV R6,#02HMOV R5,#0D0H DV: MOV R7,#08H SO:CLR CMOV A,R5RLC AMOV R5,AMOV A,R6RLC AMOV 07H,CCLR CSUBB A,TOCOUNTJB 07H,S1JNC S1ADD A,TOCOUNTSJMP S2S1:INC R5S2:MOV R6,ADJNZ R7,SOMOV A,R5DA AMOV R5,AANL A,#0FHMOV LOWCOUNT,ASWAP AANL A,#0FHMOV HICOUNT,APOP ACCPOP PSWRET外部中断0中断服务子程序INSERO:PUSH PSWPUSH ACCINC SCOUNTMOV A,SCOUNTCJNE A,#01H,LOOP1SETB TR1SJMP LOOP2LOOP1:MOV A,SCOUNTCJNE A,#0BH,LOOP2CLR TR1CLR TF1MOV TH1,#3CHMOV TL1,#0B0HMOV TOCOUNT,R0MOV R0,#00HMOV SCOUNT,#00H LOOP2:POP ACCPOP PSWRETITAB:DB 11H,77H,92H,32H,74HDB 38H,18H,73H,10H,30H,0FEH END。