杆的纵向受迫振动
03-2 杆的纵向振动与轴的扭转振动ppt课件

(1)两端固定
固定端的变形必须为零,所以固定端的边界条件为
U0 UL 0
U x C sin x D cos x
a
a
将边界条件代 入振型函数
U 0 0
D0
U L 0
C sin L 0
a
固有频率为
r
ra
L
r
L
E
D=0 C=1
r 1,2,
振型函数为
Ur
x
sin
r
L
x
r 1,2,L
(2)两端自由
燕山大学机械工程学院
School of Mechanical Engineering, Yanshan University
自由端的应力为零,即应变为零,自由端的边界条件为
dU x dU x 0
dx x0
dx xL
dU x
0 dx
x0
C0
U
x
C
sin
a
x
D
cos
a
x
dU x
dx
C
acosax源自sin2r 1 2
L
x
r 1,2,L
燕山大学机械工程学院
School of Mechanical Engineering, Yanshan University
对于上述三种边界条件:两端固定的杆; 两端自由的杆; 一端固定、一端自由的杆。
前三阶振型图为:
实例
燕山大学机械工程学院
School of Mechanical Engineering, Yanshan University
a
x
D
a
sin
a
x
=0,杆作刚
关于受迫振动、共振的实验研究
3.期刊论文 张义同.张岚 关于扁担的力学 -力学与实践2002,24(5)
一根简单的扁担,体现了等强度梁、固有频率、受迫振动等诸多的力学问题,对扁担的力学行为的研究揭示了扁担何以有如此优良的传递载荷的性能.
4.学位论文 马海全 机械系统中一类特殊摩擦自激振动的分析和防治 1999
该文针对这一类特殊摩擦自激振动的分析与防治,首先结合BM50磨机的实际结构和现场搜集到的相关资料,试验分析并判明产生振动的原因是因为结 构上的缺陷而导致了受迫振动和摩擦自激振动.然后根据试验分析的结果,提出该BM50磨机的简化模型并对其进行理论分析.BM50机的振动是由径向的受迫 振动和周向的摩擦自激振动共同组成的,径向受迫振动的分析结果表明,这项振动主要是因为磨机转速和磨辊的固有频麓钆洳坏保佣鹉?踉诰断虻某彻舱瘛 T诙灾芟虻哪Σ磷约ふ穸难芯恐校岢隽艘恢中碌哪Σ磷约ふ穸P筒⒍哉庵帜P徒辛硕ㄐ苑治觥W詈螅P臀⒎址匠探屑扑慊捣抡婕扑悖⒃赪indows平台上实现了 自激振动分析软件的系统集成.
物理实验 PHYSICS EXPERIMENTATION 2006,26(8) 3次
参考文献(1条)
1.贾爱英 简易共振实验演示仪[期刊论文]-物理实验 2005(3)
相似文献(9条)
1.期刊论文 李越洋.刘存海.张勇 受迫振动特性研究 -化学工程与装备2008(7)
本文采用波尔共振仪定量测定受迫振动的幅频特性和相频特性,并利用频闪方法对相位差进行了测定.研究发现,当系统发生共振时,固有频率和驱动 频率相等且相位差Φ=90°.
PH YSICS EXPERIMENTATION
V01.26 No.8 Aug..2006
关于受迫振动、共振的实验研究
基础教育研究
单晓峰
理论力学中的杆件的振动分析

理论力学中的杆件的振动分析杆件是理论力学中经常研究的一个重要物体。
它可以是直杆、曲杆或者弯折杆。
振动分析是研究杆件在外力作用下的动态响应,对于杆件在工程实践中的应用具有重要的意义。
本文将从理论力学的角度出发,对杆件的振动分析进行探讨。
一、杆件的自由振动杆件的自由振动是指在无外力作用下,杆件在某一固有频率下产生的振动。
对于直杆而言,自由振动可以通过解杆件的振动微分方程来求解。
对于曲杆或弯折杆,由于其几何形状的复杂性,需要借助数值求解方法进行分析。
自由振动的频率可以通过求解杆件的固有值问题得到。
根据杆件的几何形状和材料性质,可以导出杆件的振动微分方程。
然后,通过合适的边界条件,解出振动微分方程的特征方程,进而求解杆件的固有频率和振型。
二、杆件的受迫振动杆件的受迫振动是指在外力作用下,杆件产生的振动响应。
外力可以是静力荷载、动力荷载或者周期性激励力,例如谐振激励力。
在杆件的受迫振动分析中,需要建立动力学方程,考虑杆件的质量、刚度和阻尼等影响因素。
对于直杆而言,可以利用振动方程和边界条件求解出杆件的受迫振动响应。
对于曲杆或弯折杆,受迫振动的分析较为复杂。
通常需要借助有限元方法进行数值模拟,得到杆件的动态响应。
在模拟前,需要对杆件进行网格划分,并设置适当的材料参数和边界条件。
通过求解有限元方程,可以得到杆件的受迫振动响应。
三、振动分析的应用理论力学中的杆件振动分析在工程实践中有着广泛的应用。
以下列举几个典型的应用场景:1. 结构设计优化:通过对杆件的振动分析,可以评估结构的动态性能,从而优化设计。
例如,在桥梁工程中,振动分析可以用于评估桥梁的抗震性能,确保其在地震等外力作用下的稳定性。
2. 装配工艺分析:在装配过程中,杆件的振动响应可能会引起误差或者装配不良。
通过振动分析,可以识别潜在的装配问题,并采取相应的措施进行改进。
3. 动力学仿真:在机械系统或者工艺设备中,杆件的振动会对系统的动力学性能产生重要影响。
杆的振动微分方程
杆的振动微分方程杆的振动微分方程是描述杆在受到外力作用下振动的数学模型。
它是通过对杆的运动进行分析和建模,得出的一个微分方程。
本文将从杆的振动原理、杆的振动微分方程的推导以及应用领域等方面展开讨论。
一、杆的振动原理杆是一种长而细的物体,当杆受到外力作用时,会发生振动。
杆的振动是由于外力对杆产生的扰动引起的,这种扰动会使杆产生一系列的运动,包括弯曲、扭转和纵向振动等。
杆的振动可以是自由振动,也可以是受迫振动。
为了描述杆的振动,我们可以利用杆的运动方程来建立杆的振动微分方程。
杆的运动方程可以由牛顿第二定律得出,即F=ma,其中F 为杆所受外力,m为杆的质量,a为杆的加速度。
对于杆的纵向振动,可以将杆分为无数个小段,每个小段的质量为dm。
假设杆的长度为L,杆的纵向振动可用纵向位移函数y(x,t)来描述,其中x为杆的位置坐标,t为时间。
根据波动方程,可以得到杆的纵向振动微分方程为:∂²y/∂t² = v²∂²y/∂x²其中v为纵波速度。
这个微分方程可以用来描述杆在纵向受到外力作用时的振动情况。
三、杆的振动微分方程的应用杆的振动微分方程在物理学和工程学中有着广泛的应用。
在物理学中,杆的振动微分方程可以用来研究杆的固有频率和模态形状,从而了解杆的振动特性。
在工程学中,杆的振动微分方程可以用来分析杆结构的稳定性和抗震性能,以及优化杆的设计和加固方案。
例如,在建筑工程中,为了保证建筑物的安全性,需要对建筑物的结构进行抗震分析。
杆的振动微分方程可以用来模拟地震时建筑物的振动响应,从而评估建筑物的抗震性能。
通过分析杆的振动微分方程的解,可以得出建筑物的振动频率和振动模态,进而指导建筑物的设计和加固。
在机械工程中,杆的振动微分方程也常被应用于模型预测控制和振动控制等领域。
通过对杆的振动微分方程进行数值求解和分析,可以优化机械系统的振动特性,提高机械系统的性能和稳定性。
连续系统振动(a)-杆的纵向振动
2015年1月24 日 并考虑到: 《振动力学》
2 y 达朗贝尔 Adx 2 t 惯性力
y x
2 2 y 1 2 y a p ( x, t ) 弦的横向强迫振动方程 0 2 2 t x
a0 弹性横波的纵向传播速度
9
连续系统的振动 / 一维波动方程
( l ) 0 l cos 0 a0
u (l , t ) 0 x
频率方程
零固有频率对应的常值模态为杆的纵向刚性位移 x x 2015年1月24日 u ( x , t ) ( x ) q (t ) ( x ) c1 sin c2 cos 《振动力学》 a0 a0
2015年1月24日 《振动力学》
( x) (t ) q 2 a0 (常数) q(t ) ( x)
13
连续系统的振动 / 杆的纵向振动 记: 2
(t ) q 2 ( x) a0 q(t ) ( x)
''
q (t ) 2 q (t ) 0 2 ( x) ( a ) ( x) 0 0
i 1
2015年1月24日 《振动力学》 15
连续系统的振动 / 杆的纵向振动
几种常见边界条件下的固有频率和模态函数
(1)两端固定 特征:两端位移为零 边界条件: u(0, t ) (0)q(t ) 0
0 l
x
u(l , t ) (l )q(t ) 0
q(t )
不能恒为零
u ( x , t ) ( x ) q (t ) 19
连续系统的振动 / 杆的纵向振动
0 l
x
0 l
x
03-2 杆的纵向振动与轴的扭转振动
由此得 频率方程为
D0
C
a
cos
a
L0
D=0 C=1
a 2r 1 a 2r 1 E 固有频率为 r 2 L 2 L
振型函数为
Ur
cos
L0
r 1,2,
r
a x
x Csin
r
a
x Dcos
2r 1 sin x L 2
杆纵向振动的 偏微分方程为
2u u x A x 2 EA x f x, t t x x
燕山大学机械工程学院
School of Mechanical Engineering, Yanshan University
2u u x A x 2 EA x f x, t t x x
E
ra r 固有频率为 r L L
0 sin L 0 a
体纵向平动
r 1,2,
r 1,2,
C=0 D=1
振型函数为
U r x cos
r x L
(3)一端固定一端自由的杆 边界条件为
U 0 0 dU x 0 dx xL
a AL 1 L M AL / 3
EA / L M AL / 3
k M AL / 3
★上式就是将杆质量的三分之一加到质量 M上所得的单自由度系 统的固有频率计算公式。 ——和瑞利法所得的结果相一致。 ★例如,附加质量M等于杆的质量时,有
0.866 E 1 L
燕山大学机械工程学院
School of Mechanical Engineering, Yanshan University
杆的纵向振动

返回首页
1 杆的纵向振动
1.1等直杆的纵向振动
实际的振动系统,都具有连续分布的质量与弹性,因此, 称之为弹性体系统。 同时符合理想弹性体的基本假设,即均匀、各向同性服从 虎克定律。 由于确定弹性体上无数质点的位置需要无限多个坐标,因 此弹性体是具有无限多自由度的系统,它的振动规律要用时间 和空间坐标的函数来描述,其运动方程是偏微分方程,但是在
返回首页
1 杆的纵向振动
1.2固有频率和主振型
2 2u 2 u a 2 t x2
解可以用x的函数U(x)与t的谐函数的乘积表示,即
u( x, t ) U ( x)( A cos pt B sin pt )
即为杆的主振动的一般形式。
返回首页
1 杆的纵向振动
1.2固有频率和主振型
p12 2 Al l 2 M a
Ml
对于基频情况,有 p EA 1 其中
EA 是不计杆本身质量时杆的抗压刚度,以上结果与不 l
计杆本身质量而将其看成是单自由度系统所得的结果相同。
返回首页
1 杆的纵向振动
1.3主振型的正交性
这里只讨论简单边界条件的杆的主振型的正交性。 因为不涉及主振型的具体形式,所以不对杆作任何设定。即杆的 质量密度、横截面积等都可以是x的函数。因此可写出杆的纵向 振动微分方程式为 2u u
U ( x) C cos px px D sin a a
1. 杆两端固定的情况 边界条件为
U (0) 0 , U (l ) 0
sin
C0 , D sin p l0 a
p l0 a
即两端固定杆的频率方程。由此解出固有频率为
ia π pi l (i 1,2, )
杆的纵向振动与轴的扭转振动

振动方向不同:杆的纵向振动方向 与杆的轴线方向平行而轴的扭转振 动方向则与轴的截面垂直。
实际应用场景
机械制造:在机械制造中杆的纵向振动与轴的扭转振动常常同时存在影响机器的正常运转。
交通运输:车辆、船舶等交通工具中的传动系统如发动机、变速箱等都涉及到杆的纵向振动 与轴的扭转振动。
建筑工程:在建筑工程中如桥梁、高层建筑等需要考虑到风、地震等外力作用下杆的纵向振 动与轴的扭转振动的影响。
对系统稳定性的影响
振动可能导致系统失稳产生共振现象 振动会加速系统各部件的疲劳损伤降低使用寿命 振动会影响系统的测量精度和控制稳定性 适当抑制振动可以提高系统的稳定性和可靠性
对系统效率的影响
振动会使系统中的 元件磨损导致效率 降低
振动会产生额外的 热量影响系统的热 效率
振动会干扰信号传 输影响系统的信息 传递效率
杆的纵向振动与轴的扭转振动在工 程实际中常常同时存在需要综合考 虑它们的耦合效应。
振动类型不同:杆的纵向振动是拉 伸或压缩振动轴的扭转振动是旋转 振动。
区别
振动频率不同:杆的纵向振动频率 通常较高而轴的扭转振动频率相对 较低。
添加标题
添加标题
添加标题
添加标题
影响因素不同:杆的纵向振动主要受 轴向力、阻尼和支撑的影响而轴的扭 转振动主要受扭矩、阻尼和转动惯量 的影响。
,
汇报人:
目录
定义与原理
添加标题
定义:杆的纵向振动是指杆在轴向方向上的振动是机械振动的一种形式。
添加标题
原理:当外力作用于杆的一端或杆本身的重力引起杆的轴向变形时杆的轴向会产生周期性的振动即杆的纵 向振动。这种振动可以通过弹性理论和动力学方程进行描述和预测。
影响因素
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
物理本质上及振动的基本概念、分析方法上与有限多个自由度
是相似的。
返回首页
1 杆的纵向振动
1.1等直杆的纵向振动
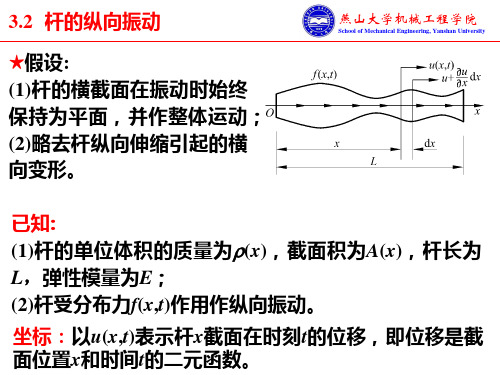
均质等截面细直杆,长为l,单位长度的质量为 ,横截 面积为A,材料的弹性模量为E,如图所示。 设杆在纵向分布力q(x,t)的作用下作纵向振动时,其横截 面保持为平面,并且不计横向变形。 以杆的纵向作为x轴,在杆上x处取微元段dx
2u u A 2 ( EA ) q( x, t ) t x x
2u E 2u 1 ( ) 2 q( x, t ) EA是常数,可写成 2 x A t
这是杆作纵向受迫振动方程, 常称为波动方程。
E 表示弹性波 a 沿杆的纵向 传播的速度
2
返回首页
1 杆的纵向振动
1.2固有频率和主振型
2u E 2u 1 ( ) 2 q( x, t ) 2 x A t
q( x, t ) 0
得到杆的纵向自由振动微分方程为
2 2u 2 u a 2 t x2
系统是无阻尼的,因此可象解有限多个自由度系统那样 ,假设一个主振动模态即设系统按某一主振型振动时,其 上所有质点都做简谐运动。 可见杆上所有的点将同时经过平衡位置,并同时达到极 限位置。
返回首页
1 杆的纵向振动
1.2固有频率和主振型
2 2u 2 u a 2 t x2
解可以用x的函数U(x)与t的谐函数的乘积表示,即
u( x, t ) U ( x)( A cos pt B sin pt )
即为杆的主振动的一般形式。
返回首页
1 杆的纵向振动
1.2固有频率和主振型
杆的前三阶主振型表示如图所示。
返回首页
1 杆的纵向振动
1.2固有频率和主振型
2. 杆的左端固定,右端自由的情况 边界条件为
U ( x) C cos
px px D sin a a
dU U ( 0) 0 , dx
x l
0
C 0,
p p D cos x 0 a a
p cos l 0 a
2 2u u 2 a 2 t x2
振型函数
代入
振动规律
u( x, t ) U ( x)( A cos pt B sin pt )
d 2 U ( x) p 2 2 U ( x) 0 2 dx a
杆有无穷多个自由度系统,振型 不再是折线而变成一条连续曲线。
当U(x)具有非零解,而且符合杆端边界条件的情况下, 求解值 p2及振型函数U(x)称为杆作纵向振动的特征值问题。 p2为特征值,U(x)又称为特征函数或主振型;而p是固有频 率。
N是x处轴的内力N u ( A ) x x x返回首页
1 杆的纵向振动
1.1等直杆的纵向振动
微元段dx受力如图。根据牛顿 第二定律得到
2u N A d x 2 ( N d x) N q( x, t ) d x x t N u 2 ( EA ) u N x x x A 2 q( x, t ) x t
振动力学
连续系统振动
返回总目录
连续系统振动
1 2 3 4 5 6 7 杆的纵向振动 杆的纵向受迫振动 梁的横向自由振动 梁的横向受迫振动 转动惯量、剪切变形对梁振动的影响 轴向力作用对梁的横向振动的影响 梁横向振动的近似解法
目录
返回首页
连续系统振动
1 杆的纵向振动
返回首页
1 杆的纵向振动
1.1等直杆的纵向振动 1.2固有频率和主振型 1.3主振型的正交性
返回首页
1 杆的纵向振动
1.2固有频率和主振型
d 2 U ( x) p 2 2 U ( x) 0 2 dx a
解可表示为
px px U ( x) C cos D sin a a
由杆的边界条件,可以确定p2值及振型函数U(x)。
返回首页
1 杆的纵向振动
1.2固有频率和主振型
现在来确定各种简单边界条件下杆的固有频率和主振型
即为一端固定,一端自由杆的频率方程。 解出固有频率为 2i 1 π
pi 2l a
i 1,2,
相应的主振型为
U i ( x) Di sin
2i 1 π x
2l
i 1,2,
返回首页
1 杆的纵向振动
1.2固有频率和主振型
3. 杆的两端都是自由的情况 边界条件为
返回首页
1 杆的纵向振动
1.1等直杆的纵向振动
实际的振动系统,都具有连续分布的质量与弹性,因此, 称之为弹性体系统。 同时符合理想弹性体的基本假设,即均匀、各向同性服从 虎克定律。 由于确定弹性体上无数质点的位置需要无限多个坐标,因 此弹性体是具有无限多自由度的系统,它的振动规律要用时间 和空间坐标的函数来描述,其运动方程是偏微分方程,但是在
U ( x) C cos px px D sin a a
1. 杆两端固定的情况 边界条件为
U (0) 0 , U (l ) 0
sin
C0 , D sin p l0 a
p l0 a
即两端固定杆的频率方程。由此解出固有频率为
ia π pi l (i 1,2, )
相应的主振型为
返回首页
1 杆的纵向振动
1.1等直杆的纵向振动
以杆的纵向作为x轴,在杆上x处取微元段dx,其左端纵向位 移为u(x),而右端即杆上x+dx处的纵向位移为 u u d x
x
dx段的变形为
u dx x
u 应变为 x
应力为
u N E E A x
u N EA x
U i ( x) Di sin
iπ x l
(i 1,2, )
返回首页
1 杆的纵向振动
1.2固有频率和主振型
pi
ia π l
(i 1,2, )
U i ( x) Di sin
iπ x l
(i 1,2, )
分别令i =1,2,3,可得系统的前三阶 固有频率和相应的主振型为
aπ π , U 1 ( x) D1 sin x ; l l 2a π 2π p2 , U 2 ( x) D2 sin x; l l 3a π 3π p3 , U 3 ( x) D3 sin x. l l p1