DLC系统的组成及特点
安全的系统发展生命周期(SSDLC)介绍

安全的系統發展生命週期 (SSDLC)介紹賴溪松 講師 TWISC@NCKU 中心主任兼召集人 成大資通安全研發中心主任 成功大學 電機系 特聘教授1課程大綱系統發展生命週期本章說明系統發展生命週期中,各階段的 意義與要點。
生命週期各階段之安全工作要求本章說明系統發展生命週期中,不同階 段的安全需求與執行要項。
應用系統安全實例介紹本章以實例的方式,點出各個階段的執 行內容。
結論安全的系統發展生命週期(SSDLC)重點結論 說明。
2第一章 系統發展生命週期 1-1 系統發展生命週期簡介 1-2 系統發展生命週期的異同31-1 系統發展生命週期簡介4系統發展生命週期簡介 系統發展生命週期 (System Development Life Cycle, SDLC)意指發展一套系統的順 序,用以開發完善的資訊系統。
一般來 說,根據各階段的定義,主要可分為:– 分析設計 (Define)• 著重需求定義,以符合業務內容及使用者需求為 目的。
需求分析 需求分析5系統發展生命週期簡介(續)– 架構設計 (Design)• 根據需求分析結果,進行包含系統任務目標、功 能關聯、邊界範圍、各階層使用者的角色等內外 部使用的規劃。
– 程式實作 (Develop)• 落實既有之規劃,符合委託者或使用者的需要, 將操作介面、資料處理、功能運作等完整的實 現。
需求分析 需求分析6系統發展生命週期簡介(續)– 系統測試 (Test)• 進行運作模擬,檢驗該系統的完成度,確保各項 功能皆可符合既定的需求。
測試項目– 分發部署 (Deploy)• 進行系統之分發與部署,確保過程中系統運作無 誤,並安排教育訓練,使人員能正確操作系統之 功能。
7系統發展生命週期簡介(續)– 運作與維護 (Maintain)• 系統服務之運作維持和更新,確保穩定的服務品 質。
– 變更管理 (Change)• 再度執行環境及需求的評估,進而調整系統,使 其得以順利的運作。
SLIC

馈电(Battery feed):交换机通过用户线向共电式话机直流馈电;
过压保护(Overvoltage Protection):防止用户线上的电压冲击或过压而损坏交换机。
振铃(Ringing):向被叫用户话机馈送铃流。
1、 交换网络
交换网络的基本功能是根据用户的呼叫要求,通过控制部分的接续命令,建立主叫与被叫用户间的连接通路。在纵横制交换机中它采用各种机电式接线器(如纵横接线器,编码接线器,笛簧接线器等),在程控交换机中目前主要采用由电子开关阵列构成的空分交换网络,和由存储器等电路构成的时分接续网络。
程控时分交换机一般在话路部分中传送和交换的是模拟话音信号,因而习惯称为程控数字交换机,随着数字通信与脉冲编码调制(PCM)技术的迅速发展和广泛应用,世界各先进国家自60年代开始以极大的热情竞相研制数字程控交换机,经过艰苦的努力,法国首先于1970年在拉尼翁(Lanion)成功开通了世界上第一个程控数字交换系统E10,它标志着交换技术从传统的模拟交换进入数字交换时代。由于程控数字交换技术的先进性和设备的经济性,使电话交换跨上了一个新的台阶,而且对开通非话业务,实现综合业务数字交换奠定了基础,因而成为交换技术的主要发展方向,随着微处理器技术和专用集成电路的飞跃发展,程控数字交换的优越性愈加明显的展现出来。目前所生产的中大容量的程控机全部为数字式的。
(2).程控用户交换机的类型
程控用户交换机有很多种类型,从技术结构上划分为程控空分用户交换机和程控数字用户交换机两种。前者是对模拟话音信号进行交换,属于模拟交换范畴。后者交换的是PCM数字话音信号,是数字交换机的一种类型。
如果从使用方面进行分类,可分为通用性程控用户交换机和专用型程控用户交换机两大类。通用型适用于一般企业、事业单位、工厂、机关、,学校等以话音业务为主的单位。容量一般在几百门以下,且其内部话务量所占比重较大,一般占总发话话务量的70%左右。目前国内生产的200门以下的程控空分用户交换机均属此种类型,其特点是系统结构简单,体积较小,使用方便,价格便宜,维护量较少。专用型适用于各种不同的单位,根据各单位专门的需要提供各种特殊的功能。下面分别说明几种专用型程控用户交换机:
青科大运动控制系统模拟题
5、在转速电流双闭环系统中,转速调节器输出限幅值的主要作用是
。
6、改变直流电动机的电磁转矩可以通过
或
实现。
7、在PWM直流调速系统中,脉宽调制器UPW的作用是:
。
二、简答题
1、说明反馈控制系统的三个基本特征是什么。 2、单闭环直流调速系统存在什么问题?为什么要引入转速电流双闭环系
统? 3、采用光电编码盘进行数字测速的方法有哪几种?各有什么特点? 4、逻辑控制无环流可逆调速系统,逻辑控制器的输入控制信号是什 么?输出信号的控制作用是什么? 5、简述位置随动系统的任务及特征。
依据信号有 Ublf
和
Ublr 。
二、简答题
1、在转速负反馈单闭环直流调速系统中,改变给定电压能否改变电动机 的转速?为什么?如果给定电压不变,调节测速反馈电压的分压比能 否改变转速?为什么?如果测速发电机的励磁发生了变化,系统有无 克服这种干扰的能力?
2、转速反馈单闭环直流调速系统存在什么问题?为什么要引入双闭环 直流调速系统? 3、在转速电流双闭环调速系统中,若要改变电动机的转速,应调节什么参 数?改变转速调节器的放大倍数Kn行不行?改变电力电子变换器的放大 倍数KS行不行?若要改变电动机的堵转电流,应调节系统中的什么参 数? 4、位置伺服系统的基本任务是什么?简述位置伺服系统与调速系统的不
(1)在V-M双闭环系统实验过程中说明如何整定系统的零位(即, 使Uc=0时,n=0)?
(2)在图3所示双闭环系统中,设当Un*=2V时,转速应为
n=1600r/min,若此时该关系不对,应调整哪一个电位器,为什么? 2、当转速反馈极性接反时,会出现什么现象?试分析此时各调节器的 工作状态。 图3 双闭环系统原理图
的是
。
信宿基本组成和技术指标
信宿基本组成和技术指标信宿是通信系统中十分重要的部分,它承载着通信的基本功能,保障了通信系统的稳定性和可靠性。
下面我们将从信宿的基本组成和技术指标两个方面进行详细的介绍。
一、信宿的基本组成信宿的基本组成一般包括综合业务数字接入平台(ISDN)、数字用户线路(DLC)、数字局端接电话机(DECT)、数字私有分支交换机(PBX)等部分。
以下是对各个部分的介绍:1. 综合业务数字接入平台(ISDN):ISDN是一种数字通信技术,它能够提供高速、多功能的语音和数据通信服务,具有数字通信、多功能终端接口、集成业务和端到端通信等特点,是信宿的重要组成部分。
2. 数字用户线路(DLC):数字用户线路是指用户通过数字方式接入信宿的线路,具有传输速率高、抗干扰能力强、传输质量稳定等优点,能够有效地提高通信质量和效率。
3. 数字局端接电话机(DECT):DECT是指数字增强型无线通信技术,它能够提供高质量的语音通信和数据传输服务,适用于室内和室外的无线通信环境。
4. 数字私有分支交换机(PBX):PBX是企业通信系统中的核心部分,它能够实现企业内部的电话交换和管理,并具有呼叫转移、语音信箱、会议通话等功能。
以上这些部分构成了信宿的基本组成,它们共同组成了一个完整的通信系统,为用户提供了稳定、高效的通信服务。
二、信宿的技术指标信宿的技术指标是评价其性能和功能的重要标准,主要包括以下几个方面:1. 传输速率:传输速率是指信宿进行数据传输时的速度,通常使用兆比特每秒(Mbps)作为单位。
传输速率越高,通信效率越高,用户体验会更好。
2. 通话质量:通话质量是指通话时的语音清晰度和稳定性,包括声音的保真度、抗干扰能力和信号稳定性等方面。
3. 可靠性:可靠性是指信宿在长时间连续工作时的稳定性和可靠性,包括硬件设备的稳定性、故障率和恢复能力等方面。
4. 扩展性:扩展性是指信宿系统的可扩展性,包括支持的用户量、支持的业务类型和接口类型等方面,能否满足不同规模和需求的通信系统。
《运动控制系统》实验指导书[新][152023]
![《运动控制系统》实验指导书[新][152023]](https://img.taocdn.com/s3/m/f651f848ddccda38376baf9e.png)
一、运动控制系统实验项目一览表实验室名称:电机拖动实验室课程名称:运动控制系统适用专业:电气工程及自动化、自动化实验总学时:16设课方式:课程实验(“课程实验”或“独立设课”二选一)是否为网络实验:否(“是”或“否”二选一)实验一晶闸管直流调速系统主要单元调试一.实验目的1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2.掌握直流调速系统主要单元部件的调试步骤和方法。
二.实验内容2.电平检测器的调试3.反号器的调试4.逻辑控制器的调试三.实验设备及仪器1.教学实验台主控制屏。
2.NMCL—31A组件3.NMCL—18组件4.双踪示波器5.万用表四.实验方法1.速度调节器(ASR)的调试按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。
注意:正常使用时应“封锁”,以防停机时突然启动。
(1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由NMCL—31的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于 5V。
(2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性拆除“5”、“6”端短接线接入5~7uf电容,(必须按下选择开关,绝不能开路),突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。
反馈电容由外接电容箱改变数值。
2.电流调节器(ACR)的调试按图1-5接线。
(1)调整输出正,负限幅值“9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值大于 6V。
(2)测定输入输出特性将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
运动控制系统考试简答题
绪论1、运动控制系统:以机械运动的驱动设备——电动机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构,在自动控制理论的指导下组成的电气传动自动控制系统。
工作原理:通过控制电动机的转矩、转速和转角,将电能转换为机械能,实现运动机械的运动要求。
2、分类(1)按被控量分:以转速为被控量的系统——调速系统以角位移或直线位移为被控量的系统——位置随动(伺服)系统。
(2)按驱动电机的类型分:直流电机带动生产机械——直流传动系统交流电机带动生产机械——交流传动系统(3)按控制器类型分:以模拟电路构成的控制器——模拟控制系统以数字电路构成的控制器——数字控制系统(4)按控制系统中闭环的多少分:单环、双环、多环控制系统3、运动控制系统的功率放大与变换装置:一方面按控制量的大小将电网中的电能作用于电动机上,调节电动机的转矩大小,另一方面按电动机的要求把恒压恒频的电网供电转换成电动机所需的交流电或直流电;4、反抗性恒转矩负载不是转矩作用方向和运动方向相反吗?那为什么n>0时T>0,n<0时T<0?答:n>0,T>0 和n<0,T<0意味着电机目前处于正转电动和反转电动状态,这个和负载转矩没有关系。
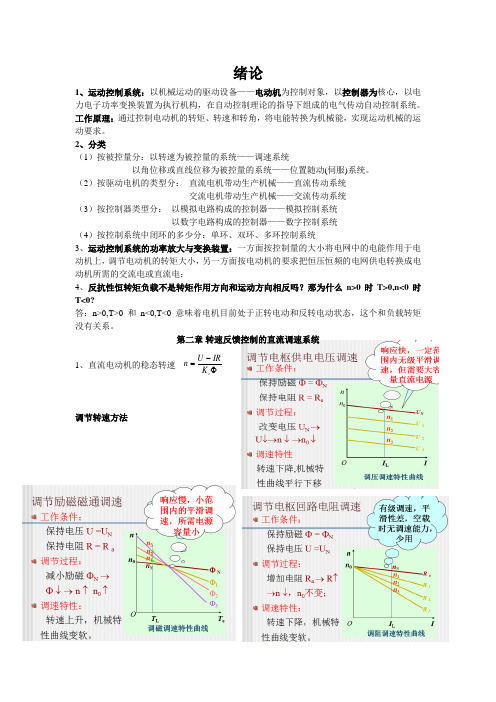
第二章转速反馈控制的直流调速系统1、直流电动机的稳态转速调节转速方法Φ-=eKIRUn2、直流电动机点数两端的平均电压 三种改变输出平均电压的调制方法:(1)T 不变,变 ton —脉冲宽度调制(PWM)(2)ton 不变,变 T —脉冲频率调制(PFM)(3)ton 和 T 都可调,改变占空比—混合调制(两点式控制)。
当负载电流或电压低于某一最小值,开关器件导通,当高于某一最大值时,使开关器件关断。
3、UPE 是由电力电子器件组成的变换器,其输入接三组(或单相)交流电源,输出为可控的直流电压,控制电压为Uc 。
UPE 变换器的器件选择:中、小容量系统,多采用IGBT 或P-MOSFET 构成较大容量系统,采用GTO 、IGCT 电力电子开关器件特大容量系统,则常用晶闸管触发与整流装置4、 系统稳态参数计算例: 用线性集成电路运算放大器作为电压放大器的转速负反馈闭环直流调速系统如图1-28所示,s s ond ρU U T t U ==5、PID调节器的类型和功能比例微分(PD):由PD调节器构成的超前校正,可提高系统的稳定裕度,并获得足够的快速性, 但稳态精度可能受到影响;比例积分(PI):由PI调节器构成的滞后校正,可以保证稳态精度,却是以对快速性的限制来换取系统稳定的;比例积分微分(PID):PID调节器实现的滞后—超前校正则兼有二者的优点,可以全面提高系统的控制性能,但具体实现与调试要复杂一些。
CLMDLC控制系统参数说明
CLM/DLC参数说明声明:本中文资料仅供参考,实际应用请仔细阅读德文或英文原版资料。
本中文资料译自:DOK-CONTRL-CLM01.3*A**-ANW1-AE-P和DOK-CONTRL-DLC*A+DLC*G-AW03-AE-PCLM/DLC 参数使用手册本手册说明用于DLC和CLM控制操作所需输入的参数。
用户通过对各种参数输入不同的数值以使DLC或CLM适合于所用的机床及其机械特性。
这些参数允许一个标准的控制系统执行不同的应用。
所写的全部的应用参数都有统一的数据格式。
在对DLC或CLM控制进行操作和编程前。
用户必须先将参数值输入DLC或CLM内存。
注意:在应用编程前必须了解全部的参数值。
如果编程或调试功能超出参数的约束值,控制器将停止并显示错误诊断。
1.1 参数集说明DLC和CLM包括下列参数集参数集A:轴参数集DLC(A100-A125,A200-A225)/DLM(A100-A125,A200-A225,A300-A325,A400-A425) 包括了自动方式和手动方式操作的轴的操作数值。
这些参数允许用户对DLC或CLM所控制的电机及其驱动特性进行设置。
根据材料和应用的要求,它们也允许使用者设置不同的运动轨迹系数。
包括进给分辨率,加速度,进给速率,等等。
参数集B:系统参数集,它建立了DLC和CLM的操作模式。
它允许使用者根据不同的选择对D LC或CLM进行配置:如显示屏显示语言(英语,德语,西班牙语,法语,意大利语,或葡萄牙语);控制接口的选择,就象IDS或SOT;同步,测量轮操作,多任务,等其他可选特征的选择和配置。
参数集C(仅DLC具有的参数 ) :驱动器调节参数集,该参数可以用CTA小键盘或RS232串行接口来设置。
标准的驱动器调节参数只能用CTA键盘设置。
CTA键盘和RS232串行接口不能同时进行。
驱动器调节参数的检查和编辑与A参数B参数相同。
C参数存入驱动器存储器中。
随着每一次开电源,C参数从驱动器传送到DLC。
运动控制系统习题集解(直流部分)3

习题四 可逆直流调速系统和位置随动系统4-1 晶闸管-电动机系统需要快速回馈制动时,为什么必须采用可逆线路?答: 在晶闸管-电动机调速系统中,只要是需要快速的回馈制动,常常也采用两组反并联的晶闸管装置,由正组提供电动运行所需的整流供电,反组只提供逆变制动。
这时,两组晶闸管装置的容量大小可以不同,反组只在短时间内给电动机提供制动电流,并不提供稳态运行的电流,实际采用的容量可以小一些。
4-2 晶闸管装置供电的晶闸管-电动机(V-M)系统, 在整流和逆变状态下的机械特性,并分析这种机械特性适合于何种性质的负载.单组晶闸管装置供电的V-M 系统在拖动起重机类型的负载时也可能出现整流和有源逆变状态a )整流状态:提升重物,a < 90°,U d0 > E ,n > 0由电网向电动机提供能量。
b )逆变状态:放下重物a > 90°,U d0 < E ,n < 0 由电动机向电网回馈能量。
整流状态:电动机工作于第1象限;逆变状态:电动机工作于第4象限。
待逆变状态:实际上,这时逆变组除环流外并未流过负载电流,也就没有电能回馈电网,确切地说,它只是处于―待逆变状态‖,表示该组晶闸管装置是在逆变角控制下等待工作。
逆变状态:只有在制动时,当发出信号改变控制角后,同时降低了整流电压和逆变电压的幅值,一旦电机反电动势 E > |U d0r | = |U d0f |,整流组电流将被截止,逆变组才真正投入逆变工作,使电机产生回馈制动,将电能通过逆变组回馈电网。
同样,当逆变组工作时,另一组也是在等待着整流,可称作处于―待整流状态‖。
4-3 分析配合控制的有环流可逆系统反向启动和制动的过程。
画出各参变量的动态波形,并说明在每个阶段中ASR 和ACR 各起什么作用,VF 和VR 各处于什么状态。
① 整个制动过程可以分为两个主要阶段,其中还有一些子阶段。
主要阶段分为:I. 本组逆变阶段; II.它组制动阶段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
与中压变电站内的和中压系统的表计进行上、下行通信。 在中压Modem的开发上,采用了最新的数字信号处理和 快速存储器技术,研制的DLM传输速率可
达36kbps,能满足现代DA/DSM系统的需要。在系统设计 上,考虑了中低压电网上进行通信的一些特点,以及电 缆和架空线电网运行方式的变化。为
数据就可以很快地切换到备用的路径,继续与主站保持 联系。 数字配电线载波新技术,载波调制新技术简介 在中压电网中不仅需要对RTU,而且还需要对大
量抄表数据集中器进行处理毕,谢谢观赏!
微商货源 /
了确保很高的传输可靠性,选择了一种数据包传输的概 念。另外,系统网络设备能对通道的通信质量进行自动 检测和调整,开关断开或断线时能够自动地选择数
据的通信路径。 DLC通信控制器按区域组网,在一个区 域里选其中一个作为主站,其余为从站。主站的通信供 用电控制器负责同控制中心联系,而从站负责
同终端设备,如电度表、RTU、INC等联系。由于开关的 操作会影响通道本身的通信,所以主站设备设有一条备 用的路径。如果电网拓扑结构改变,从站的