高速计数器中瞬时脉冲问题
如何用高速输入脉冲测定瞬时流量
如何用高速输入脉冲测定瞬时流量
西门子S7-200 PLC高速计数功能除用于常见的运动控制系统转速测量之外,在流量计量方面也有着广泛的用途。
由于PLC内部没有相应的算法来计算频率,因此,测定脉冲输出信号的流量计的瞬时流量就需要在STEP 7 Micro/WIN中通过以下三部分编程来实现:(1) 定义高速计数器计数流量计输出脉冲;(2) 采用定时中断采集周期时间内高速脉冲输入;(3) 计算高速输入脉冲频率并通过流量换算公式:瞬时流量(ml/s)=脉冲频率(pulse/s)÷脉冲当量(pulse/ml)计算瞬时流量。
1 定义高速计数器
脉冲输出信号的流量计适用于单相计数,因此在主程序中定义高速计数器模式0,将HSC0 的控制字节SMB37赋值16#C8,启用高速计数器﹑更新初始值﹑设定计数方向为增计数,并使用SM0.1初始化高速计数器,如图1所示。
图1定义高速计数器
2 高速输入脉冲频率计算
为保证瞬时流量的准确性及实时性,须按照一定的时间间隔采集高速输入脉冲。
示例中采用定时中断0每隔250ms更新高速输入脉冲值HC0,并在中断程序中应用该数值运算得到高速输入脉冲频率,如图2,图3所示。
图2定时中断
图3 高速输入脉冲频率计算
为采集250ms时间间隔的脉冲值,在频率计算的同时,需要更新高速计数器。
由于只是更新初始值,因此初始化高速计数器时设定的控制字SMB37 不用再做更改,调用HSC指令即可。
3瞬时流量计算
参考流量换算公式,在中断程序中通过编程运算即可计算出瞬时流量,如图4所示。
图4 瞬时流量计算
关键词
高速输入脉冲,瞬时流量。
编码器的脉冲计数高速计数器小总结

我们一般采用高速输出信号控制步进电机和伺服电机做位置,角度和速度的控制,比如定位,要实现这个目的,我们要知道这几个条件:1、PLC高速输出需要晶体管输出,继电器属于机械动作,反应缓慢,而且易坏2、以PLC为例,高速输出口采用Y0 、Y13、高速输出指令常用的有PLSY 脉冲输出PLSR 带加减速PLSV……可变速的脉冲输出ZRN……原点回归DRVI……相对定位DRVA……绝对定位4、脉冲结束标志位M80295、D8140 D8141 为Y0总输出脉冲数6、在同一个程序里面Y0做为脉冲输出,程序可以存在一次,当需要多次使用的时候,可以采用变址V进行数据的切换,频率,脉冲在不同的动作模式中,改变数据正对上述讲解的内容:我们用一个程序来表示若我们以后可能接触步进;伺服这一块,上述内容,大家一定要熟练掌握在高速计数器与编码器配合使用之前,我们首先要知道是单向计数,还是双向计数,需要记录记录的数据,需要多少个编码器,在PLC中也需要多少个高速输入点,我们先要确认清楚;当我们了解上面的问题以后,参照上题的寄存器分配表得知我们该选择什么高速计数器如:现在需要测量升降机上升和下降的高度,那么我们需要采用双向编码器,即可加可减的,AB相编码器,PLC需要两个IO点,查表得知,X0 X1为一路采用C251高速计数器那么我们可以这样编程,如图开机即启动计数,上升时方向,C251加计数下降时方向,C2 51减计数我们要求编码器转动的数据达到多少时,就表示判断实际升降机到达的位置注意:在整个程序中没有出现X0、X1这个两个软元件是因为C251为X0、X1的内置高速计数器,他们是一一对应的,只要见到c251,X0 X1就在里面了,当然,用了C251以后,X0 、X 1不能在程序里面再当做开关量使用了接线参照下图相对11题定时器和计数器来说,本题目主要是告诉大家学习高数处理的功能PLC内部高速计时器是计数器功能的扩展,高速计数器指令与定位指令使PLC的应用范围从逻辑控制、模拟量控制扩展到了运动控制领域;特点:其最大的特点就是执行的过程中不受PLC的扫描周期影响,而是按照中断方式工作,并且立即输出;之前的题目中,我们说过内部信号计数器,它可以对编程元件X、Y、M、S、T、C信号进行计数;当X信号计数时,要求X的断开和接通一次时间应大于PLC的扫描周期,否则会出现丢步的现象,如果PLC的扫描周期为40ms,则一秒里X的信号频率最高位25HZ;这么低的速度限制了PLC的高速应用范围,如编码器,可以达到10000HZ;编码器后面会讲到我们看高速计数器,可以先参照下面表格图片出处:FX编程手册U:增计数输入;D:减计数输入;A:A相输入;B:B相输入;R:复位输入;S:启动输入;一般不同型号的PLC,可能对应高速计数器的点位控制不一样,首先满足硬件功能;然后在软件上进行实现,两者缺一不可图片出处:三菱编程手册我们现在说说高速计数器与普通计数器的区别:1、高速计数器相对于普通计数器,不受扫描周期的影响,但是,速度还是有限制的;2、多个高速计数输入口,和对应的高速计数器不是任意选择的,由上表得知,他们是一一对应的3、所有高速计数器均为停电保持型,题当前值和出点状态在停电时都会保持停电前的状态,也可以利用参数设定为非停电保持型;4、作为高速计数器的高速输入信号,建议使用电子开关信号,而不要使用机械开关触点信号,由于机械触点的振动会引起信号输入误差,从而影响到正确计数;考考大家的理解能力看了上图,再看后面的内容,我们会不会对高速计数器又一步加深理解编码器是产生脉冲反馈给PLC的检测装置,一般用来检测外围设备走的距离和速度,我们常见的检测位置的元件有:光电编码器、光栅编码器;最常用感应同步器、磁栅编码器、容栅编码器;10年前的产品电位器;30多年前的产品激光干涉仪、机器视觉系统;高精度、高成本旋转式光电编码器原理:光电编码器,是通过光电转换将输入轴上机械几何位移量转换成脉冲数字量的传感器; 光电编码器是有码盘和光电检测装置组成;码盘是在一定直径的透明圆板上等分的印制了若干个细长线,如图,经发光二极管等电子元件组成的检测装置检测脉冲输出信号,即可测量编码器输入轴的转角;通过计算单位时间编码器输出脉冲的个数就能计算出输入轴的转速;增量式编码器:增量式编码器是直接利用光电转换原理输出三组方波脉冲:A、B和脉冲相位差90度,以判断旋转方向,如下图所示;增量式编码器特点:l 构造简单,l 机械寿命长,l 抗干扰能力强,可靠性高;l 缺点是无法输出轴转动角的绝对位置;绝对式编码器:绝对编码器是直接输出数字量的传感器,在它的圆形码盘上沿径向有若干同心码道,每条道上由透光和不透光的扇形区相间组成,相邻码道的扇区数目是双倍关系,码盘上的码道数就是它的二进制数码的位数,在码盘的一侧是光源,另一侧对应每一码道有一光敏元件;当码盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数;这种编码器的特点是不要计数器,在转轴的任意位置都可读出一个固定的与位置相对应的数字码;显然,码道越多,分辨率就越高,对于一个具有N位二进制分辨率的编码器,其码盘必须有N条码道;特点:1.可以直接读出角度坐标的绝对值;2.没有累积误差;3.电源切除后位置信息不会丢失;4.有10位、14位、16位等品种;。
s高速脉冲计数器及PTO和PWM
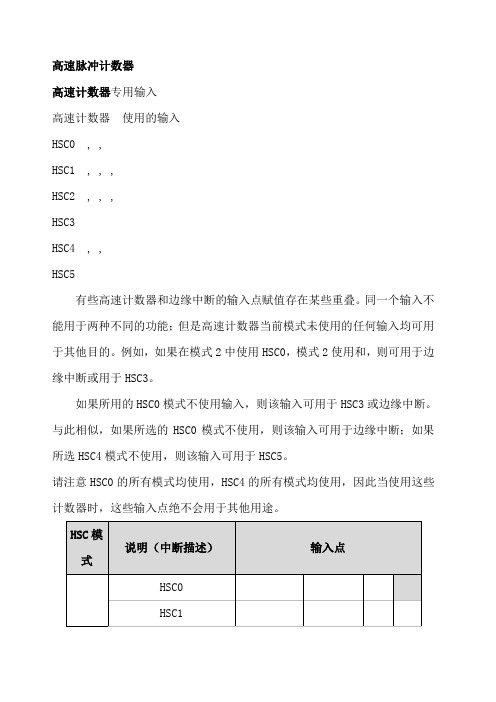
高速脉冲计数器高速计数器专用输入高速计数器使用的输入HSC0 , ,HSC1 , , ,HSC2 , , ,HSC3HSC4 , ,HSC5有些高速计数器和边缘中断的输入点赋值存在某些重叠。
同一个输入不能用于两种不同的功能;但是高速计数器当前模式未使用的任何输入均可用于其他目的。
例如,如果在模式2中使用HSC0,模式2使用和,则可用于边缘中断或用于HSC3。
如果所用的HSC0模式不使用输入,则该输入可用于HSC3或边缘中断。
与此相似,如果所选的HSC0模式不使用,则该输入可用于边缘中断;如果所选HSC4模式不使用,则该输入可用于HSC5。
请注意HSC0的所有模式均使用,HSC4的所有模式均使用,因此当使用这些计数器时,这些输入点绝不会用于其他用途。
四台计数器有三个控制位,用于配置复原和起始输入的激活状态并选择1x或4x计数模式(仅限正交计数器)。
这些控制位位于各自计数器的控制字节内,只在执行HDEF指令时才使用。
执行HDEF指令之前,必须将这些控制位设为所需的状态,否则计数器采用所选计数器模式的默认配置。
复原输入和起始输入的默认设置为现用水平高,正交计数速率为4x(或4乘以输入时钟频率)。
一旦执行了HDEF指令,就不能再改变计数器设置,除非首先将CPU设为STOP(停止)模式。
下表复位和启动输入的有效电平以及1x/4x控制位**缺省设置为:复位输入和启动输入高电平有效,正交计数率为四倍速(四倍输入时钟频率)。
定义控制字节一旦定义了计数器和计数器模式,您就可以为计数器动态参数编程。
每台高速计数器均有一个控制字节,允许完成以下作业:* 启用或禁止计数器* 控制方向(仅限模式0、1和2)或初始化所有其他模式的计数方向* 载入当前值通过执行HSC指令可激活控制字节以及相关当前值和预设值检查。
下表说明每个控制位。
每台高速计数器都有一个32位初始值和一个32位预设值,初始值和预设值均为带符号的整数值。
欲向高速计数器载入新的初始值和预设值,您必须设置包含初始值和/或预设值的控制字节及特殊内存字节。
关于高速计数和脉冲问题

关于高速计数和脉冲问题
1、高速计数器里的比较值可否在程序中更改,也就是在运行时更改。
因为机器速度不同时,需要反应的位置不同,比如机器运转较快时,提前一些进行比较并中断,执行ob40
2、编码器是a、b、z的,cpu用的是313c,a/b相接到了i0.0和i0.1,i0.4输入点设置了硬件中断,接z相,用于接收到信号后执行ob40,对计数器进行复位。
当使用24v电直接接进i0.4,可以复位计数器,但是z相接进去,却复位不了,好像是捕捉不到z相的脉冲信号
最佳答案
1、比较值可以在运行时修改,对于cpu31xc调用sfb47,使用作业号16#04来修改。
具体可以参考s7-300的技术功能手册或下载中心文档:a0499s7-300高速计数使用帮助。
2、cpu313c不支持z脉冲输入和复位功能。
如果通过直接的硬件中断捕捉不到脉冲,可以将z信号作为第二个高速计数通道的输入脉冲接入i0.3,然后将最大计数频率设为1khz,使用“oncountpulse”中断功能,并在中断中对计数器进行复位。
这样应该没有问题。
西门子200(CPU226cn)高速计数器部分调试说明(适用于飞剪系统)

编者注:此文档主要针对西门子S7-200系列中的CPU226CN的高速计数器模块,内容包括S7-200实验平台的搭建、CPU226CN高速计数器部分的解决方案和高速计数器部分的简单程序讲解。
建议:首先请简单阅读用户手册相关内容,再做此实验。
目录:1、S7-200实验平台的搭建 (2)1.1实验材料的准备 (2)1.2安装microwinv4.0 (2)1.3对实验器材进行连线安装 (3)2、CPU226CN高速计数器部分的解决方案 (4)2.1 配置通讯 (4)2.2 配置高速计数器,使用高速计数器向导 (6)2.3 完善高速计数器程序,实现高速计数功能 (10)2.4 高速计数程序的简单描述 (13)2.5 修改程序参数,实现I0.2上升沿清零 (17)3、实验小结 (18)1. S7-200实验平台的搭建进行本次实验的主要目的是要了解S7-200系列中的CPU226CN CPU的高速计数功能以及配置使用方法。
在进行实验以前首先要将实验中要用到的软件和硬件做一个详细的准备,避免在实验过程中因为缺少材料而导致实验失败。
1.1 实验材料的准备硬件:z CPU226CN模块(6ES7 216-2BD23-OX8)z S7-200系列CPU编程电缆z编程计算机(带9针串口)z24V开关电源z编码器1-2个软件:z microwinv4.01.2 安装microwinv4.0运行microwinv4.0的安装程序,正常安装。
安装过程中程序会提示选择将来要使用的通讯方式,如下图所示其默认选项为“PC/PPI cable(PPI)”,即计算机串口对PLC的PPI的通讯方式,此选项可以视实际实验时选用的通讯方式自由选择。
选择好通讯方式后完成程序安装,并重新启动计算机。
1.3 对实验器材进行连线安装西门子CPU226CN的进线电压为交流220V,在对CPU进行接线时一定要按照西门子提供的接线方法规范接线,西门子CPU226CN的接线图如下所示完成连接所有硬件的线路并检查无误后,接通电源。
高速计数及脉冲输出指令
I0.4 时钟 时钟
模式2
时钟
模式3 模式4
时钟 时钟
方向 方向
模式5
时钟
方向
模式6 模式7
增时钟 增时钟
减时钟 减时钟
I0.2
I1.0
I1.1
I1.4
I1.5
I0.5
复位
复位
•开 启
复位
复位
•开 启
复位
(2)设置控制字节
HSC0 HSC1 HSC2 SM37.0 SM47.0 SM57.0
HSC3
PTO/PWM旳多段管线功能在许多应用中非常有用,尤其在 步进电机控制中。
例如利用带有脉冲包络旳PTO控制步进电机,实现加速、匀 速和减速。包络表值包括三段:加速(1)、匀速(2)、减 速(3)。
假定需要4000个脉冲到达要求旳电机转动数,开启和结束 频率是2kHz,最大脉冲频率是10kHz。因为包络表中旳值 是用周期表达旳,而不是用频率,需要把给定旳频率值转 换成周期值。所以,开启和结束旳脉冲周期为500 μs,最 高频率旳相应周期为100μs。在输出包络旳加速部分,要 求在200个脉冲左右到达最大脉冲频率。也假定包络旳减速 部分,在400个脉冲完毕。
第十章 高速计数及脉冲输出指 令
第一节 高速计数器
一、 高速计数器
6个高速计数器(HSC0~HSC5),如表所示。这6个高速 计数器均为32位双向计数器
CPU型号
支持HSC号
最高工作频 单相
率
双相
CPU221和CPU222 HSC0、HSC3、HSC4、HSC5
4个30kHz 2个20kHz
CPU224、CPU226 HSC0~HSC5全部6种
• 要装入旳 值
6.7高速计数器与高速脉冲输出指令解析
高速计数器占用输入/输出端子情况表
高速计数器 HSC0 HSC1 使用的输入端子 I0.0, I0.1, I0.2 I0.6, I0.7, I1.0, I1.1
HSC2 HSC3 HSC4 HSC5
I1.2, I1.3, I1.4, I1.5 I0.1 I0.3, I0.4, I0.5 I0.4
各高速计数器不同的输入端有专用的功能,如:时钟脉冲输 入端、方向控制端、复位端、起动端。
图6-6
所示内部方向控制的单路加/减计数
(2)单路脉冲输入的外部方向控制加/减计数
PV=CV时产生中断 PV=CV时产生中断和方向改变产生中断 计数器允许,当前值清0,预置值=4 输入的一路脉冲 外部方向控制 1 1=加计数;0=减计数 0
5 4 3 4 3 2 1
计数器当前值
2 1
0
有一个脉冲输入端,有一个方向控制端,外部方向控制输入 信号=1时,加计数;方向输入信号=0时,减计数。
一、高速计数器基本情况
●用来累积比可编程控制器的扫描频率高得多的脉 冲输入,利用产生的中断事件完成预定的操作。
各主机的高速计数器数量及其编号
主机型号
可 用 HSC数量 HSC 编号范围
CPU221
4
CPU222
CPU224
6
CPU226
HC0,HC3,HC4,HC5
HC0-HC5
高速计数中断
高速 计数器 HSC0 当前值=预设值中断 事件号 12 优先级 10 计数方向改变中断 事件号 27 优先级 11 外部信号复位中断 事件号 28 优先级 12
二、高速计数器的工作模式
1. 高速计数器的计数方式 (1)单路脉冲输入的内部方向控制加/减计数
s7-200高速计数器使用技巧

s7-200高速计数器详细解说一、高速计数器普通计数器是通过两次扫描中输入端子的电平变化实现计数的,可以用普通的寄存器通过加1指令实现。
特点是受扫描的影响,只能用于低频脉冲计数。
高速脉冲使用PLC内部的高速计数器,各种PLC都内置高速计数器。
S7-200 CPU具有集成的、硬件高速计数器。
CPU221和CPU222可以使用4个30kHz单相高速计数器或2个20kHz的两相高速计数器,而CPU224和CPU226可以使用6个30kHz单相高速计数器或4个20kHz的两相高速计数器。
高速计数器的主要功能就是对主机实际转速反馈进行测量,这是电子调速器的一项重要功能,因为主机实际转速反馈测量的准确与否直接关系到保证主机转速稳定,保证主机运行的安全。
重点介绍了S7-200 PLC高速计数器。
在开发研制中发现,采用S7-200 PLC高速计数器可以非常准确地对电动机实际转速反馈进行测量,而且硬件实现非常简单,价格也比较低,具有很大的应用价值。
(一)概述普通计数器是通过两次扫描输入端子电平变化来进行计数的,因此其端子输入脉冲的频率必须必扫描频率低得多。
对于高速脉冲而言,这种方法会出现丢失脉冲导致计数错误。
S7-200内置了高速计数器HSC,其工作情况类似于单片机中的计数器。
起动后不受扫描周期的影响,由硬件自动计数,当满足一定条件时发出中断申请。
其最高技术频率高达30KHz。
S7-200的计数器最多可以设置12种不同的工作模式,用于实现高速运动的精确控制。
S7-200还设有高速脉冲输出,输出频率可以高达20KHz。
用于PTO(脉冲串输出,输出一个频率可调,占空比50%的脉冲。
)和PWM(脉宽调制脉冲)。
PTO用于带有位置控制功能的步进电机控制或者伺服电机驱动器控制,通过输出脉冲的个数作为位置给定值的输入,以实现定位控制功能。
通过改变脉冲的输出频率,可以改变运动的速度。
PWM用于直接驱动调速系统或运动控制系统的输出,控制主逆变回路。