自动化专业英语第三版王树青unit1翻译
自动化专业英语课文重点句子翻译(精)

自动化专业英语课文重点句子翻译(精)In the case of a resistor, the voltage-current relationship is given by Ohm’s law, which states that the voltage across the resistor is equal to the current through the resistor multiplied by the value of the resistance.就电阻来说, 电压—电流的关系由欧姆定律决定。
欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
2]It may be that the inductor voltage rather than the current is the variable of interest in the circuit. 或许在电路中,人们感兴趣的变量是电感电压而不是电感电流。
Viewed in this light, it will be found that the analysis of three-phase circuits is little more difficult than that of single-phase circuits.这样看来,三相电路的分析比单相电路的分析难不了多少。
At unity power factor, the power in a single-phase circuit is zero twice each cycle.在功率因数为 1时,单相电路里的功率值每个周波有两次为零。
It should be noted that if the polarity of point Awith respect to N ( is assumed for the positive half-cycle, then when used in the same phasor diagram should be drawn opposite to, or 180? out of phase with, .应该注意,如果把 A 点相对于 N 的极性(定为正半周,那么在用于同一相量图中时就应该画得同相反,即相位差为 180?One problem with electronic devices corresponding to the generalized amplifiers is that the gains, AU or AI, depend upon internal properties of the two-port system.对应于像广义放大器这样的电子装置,一个问题就是增益AU 或者AI ,它们取决于两输入端系统的内部特性。
《自动化专业英语》中英文翻译-中文部分
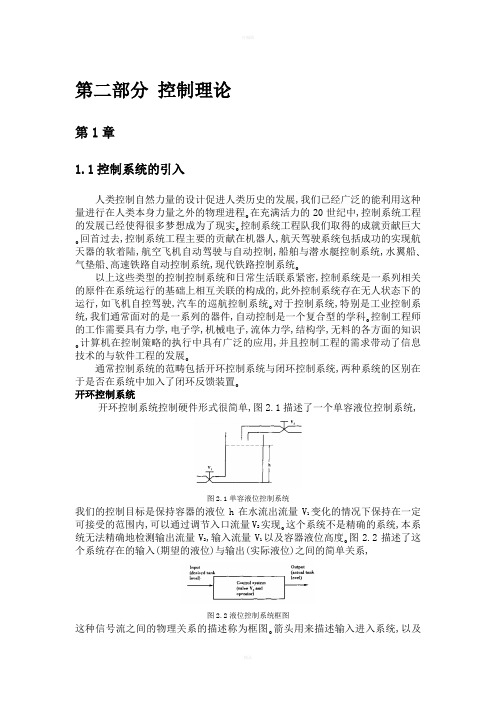
第二部分 控制理论第1章1.1控制系统的引入人类控制自然力量的设计促进人类历史的发展,我们已经广泛的能利用这种量进行在人类本身力量之外的物理进程。在充满活力的20世纪中,控制系统工程的发展已经使得很多梦想成为了现实。控制系统工程队我们取得的成就贡献巨大。回首过去,控制系统工程主要的贡献在机器人,航天驾驶系统包括成功的实现航天器的软着陆,航空飞机自动驾驶与自动控制,船舶与潜水艇控制系统,水翼船、气垫船、高速铁路自动控制系统,现代铁路控制系统。以上这些类型的控制控制系统和日常生活联系紧密,控制系统是一系列相关的原件在系统运行的基础上相互关联的构成的,此外控制系统存在无人状态下的运行,如飞机自控驾驶,汽车的巡航控制系统。对于控制系统,特别是工业控制系统,我们通常面对的是一系列的器件,自动控制是一个复合型的学科。控制工程师的工作需要具有力学,电子学,机械电子,流体力学,结构学,无料的各方面的知识。计算机在控制策略的执行中具有广泛的应用,并且控制工程的需求带动了信息技术的与软件工程的发展。通常控制系统的范畴包括开环控制系统与闭环控制系统,两种系统的区别在于是否在系统中加入了闭环反馈装置。开环控制系统开环控制系统控制硬件形式很简单,图2.1描述了一个单容液位控制系统,图2.1单容液位控制系统我们的控制目标是保持容器的液位h 在水流出流量V 1变化的情况下保持在一定可接受的范围内,可以通过调节入口流量V 2实现。这个系统不是精确的系统,本系统无法精确地检测输出流量V 2,输入流量V 1以及容器液位高度。图2.2描述了这个系统存在的输入(期望的液位)与输出(实际液位)之间的简单关系,图2.2液位控制系统框图这种信号流之间的物理关系的描述称为框图。箭头用来描述输入进入系统,以及输出流出系统。这个控制系统没有反馈连接,这种反馈缺失用术语描述为开环。图2.3描述场效应管控制的直流电机控制切断轮恒速运转。一旦有木料接触到切断轮的表面,将对驱动转矩产生一个干扰转矩,在假定控制信号保持恒定的情况下,导致切割轮的转速下降。干扰的加入位于电机与负载之间,如图2.4所示。图2.3 晶闸管控制直流电机图2.4 带有干扰情况下晶闸管控制直流电机干扰转矩,以及其他的输入,对开环系统的控制的精确性产生严重的影响,这种系统由于不存在反馈,所以根本就不可自动的修正输出。闭环控制系统闭环控制系统源自于输入端的来自于输出端的输出信号的精确复制。偏差检测器源于输入与输出信号之间偏差。闭环控制系统一直对输出信号起控制作用直到输出与输入的偏差信号为零。在闭环控制系统中,输出与输入的任何偏差都能被自动的进行修正。通过适当的设计,系统将能克服任何干扰以及原件情况的变化对系统所产生的影响。图2.5单容液位自动控制系统图2.6 闭环控制系统框图图2.5阐述了图2.1所描述的单容液位控制系统的另一种形式。这个系统可变化的情况下,保持液位h在与期望的精确地误差范围内。如果以在输出流量V1液位不是设定值,将产生一个偏差电压。这个电压经过放大加到控制输入流量V2的电机上,通过改变输入流量修正液位,该系统的系统框图如图2.6所示。由于存在反馈,这种系统被称为闭环系统。图2.4所示的晶闸管控制直流电机系统的另一种形式即:自动调速系统如图2.7所示。反馈系统可以在干扰转矩存在的情况下使电机的转速保持相对不变。该系统的反馈部分由将转速转换为电压信号的转速计充当。为了输出期望转速与实际转速的偏差信号,差动放大器产生用于改变直流电机励磁电流的偏差信号来修正到期望的输出转速。图2.7 晶闸管控制直流电动机的自动控制系统反馈控制用于控制位置、转速以及加速度即自动驾驶在民用以及军事工业中是很常见的。反馈控制系统有他的优点,同样也具有一些列的缺点,应为反馈的存在,会使系统存在震荡,通过适当的设计,可以实现在系统稳定的前提下利用这些优点。1.2拉普拉斯变换与传递函数拉普拉斯变换拉普拉斯变换对解决一般的描述系统的方程有帮助。通常将变量的拉普拉斯变换形式写成其大写形式,如:y(t)的拉普拉斯变换形式为Y(s)。在这些符号中,微分方程中的t代表时域而拉氏变换中的s代表复数域。对此,有如下定义:式中,L{ }表示拉普拉斯变换,我们用如下形式表示拉普拉斯反变换:需要注意的是:虽然y(t)表示实数方程,但其拉普拉斯变换Y(S)表示的是关于复变函数s的复数方程。整个过程的完成需要大量的复数运算,单我们不关心进行拉普拉斯反变换所进行的运算。相反,在对于系统框图的动态描述中,我们将简单的用到一些关于某些不同方程拉普拉斯变换的结论。拉普拉斯变换是线性运算所以非常适合于描述线性运动系统。拉普拉斯变换的微分性质如下:式中,y(i)(0)表示i阶微分的初始条件,拉普拉斯变换的积分性质表示如下:拉普拉斯变换还有另外一条使用的性质,这条性质被称作终值定理:规定了二者的极限值。利用拉普拉斯变换求解方程当线性系统的的物理关系使用微积分方程描述之后,系统的动态特性的分析可以通过解方程以及与初始条件结合而得出。下例所示的为拉普拉斯变换在求解线性微分方程的应用。这种按步骤从原始方程消除时间以及时间的微分的最终结果是得出一个关于s的代数方程。这个方程然后再用来变换为关于时间的方程。最后一步包含了利用拉普拉斯反变换直接解决问题。例:考虑如下线性微分方程:设初始条件为:对式(2.7)两边同时进行拉普拉斯变换可得如下方程:带入初始条件并求解Y可得如下方程:如果对式(2.9)进行部分分式展开,可得如下方程:式(2.10)的拉普拉斯反变换为:该结果包含两个部分:1表示稳态性能,-4e-3t+5-2t表示瞬态性能,检验稳态性能,根据式(2.7)所示的终值定理:传递函数的概念为了便于分析与设计,控制系统通常用一组微分方程来描述。框图是用来直观地描述方程的内部关系的一种图。每一个原件都是用其自身的传递函数来描述的,传递函数定义为模块的输出与输入的比。在用传递函数描述模块时,假设模块已处于稳态以及零初始条件。图2.8线性系统框图考虑图 2.8所示的框图,对于该系统而言,唯一的假设就是系统的输入与输出之间服从线性关系。并且该系统为定常系统,可用如下形式表示:在零初始条件下,式(2.13)对应的拉普拉斯变换可写为:比C(S)/R(S)称为模块的传递函数,并且完全的描述了系统的特性。令模块的传递函数表示为G(S),可得:设系统处于零初始状态,则输出的拉普拉斯变换为:基本线性反馈系统如图2.9所示G(s)和H(s)分别表示系统前向通道与反馈通道的传递函数,他们分别构成了串联装置与反馈环。整个系统的传递函数C(s)/R(s)为:图2.9一般单闭环反馈系统框图第2章2.1控制系统的性能指标工业系统与装置的设计都需要满足一定的性能要求,或者使系统具有一些特定的性能。这些性能指标必须绝对严格,这对于何时能对手头的工作实现足够好的设计非常有用,出于在更多的复杂、不同、昂贵的系统设计中取得结果几乎不变的较好的质量。自动控制系统不容马虎。数量反馈的系统的控制行为包括稳态和暂态响应,这两类相应通常用于描述反馈控制系统的性能指标。反馈系统的稳态性能通常描述为系统的稳定性和精确性。稳定性在买描述系统的性能指标之中时极其重要的一部分。系统必须是稳定的,即使系统受控制信号,闭环内任何部位的其他输入,供电系统变化以及反馈参数变化等情况的影响的时候。稳态精度是反馈控制系统的另外一个重要的性能。设计者通常会尽力设计使系统对期望的输入具有最小的偏差。理论上,对于控制系统,理想的情况是在位置,速度,加速度以及无差的高阶导数变化的情况下维持系统稳定的输出。这种性能是不实际并且不可实现的。所幸,对于实际的系统而言,其对精确度的要求没有这么严格。系统的稳态性能的判断可以根据终值定理完成,该定理的拉普拉斯变换形式已由式(2.6)给出。我们接下来考虑单位反馈系统,如图2.10所示,稳态误差E(s)对于输入R(s)的关系如下式:图2.10 单位反馈系统稳态误差表达式如下:输入R(s)可以是多种标准信号中的一种,闭环系统的稳态误差可以被认为是开环系统的传递函数的形式。控制工程常见的输入是位置,速度和加速度。阶跃,斜坡和抛物线输入分别是这些物理量的简单的数学表达式。在确定系统的稳态误差时,设系统具有如下标准形式:式中:S N=位于复平面原点处的重极点K=表达式的增益在动态相应情况下,规定出有意义的变量特性是比较困难的,因为模型在动态过程中的相对权重取决于输入,在动态过程中很难判断。通常使用的性能指标的设置为:将系统置于阶跃相应下。通过说明三个延迟时间,超调量,调整时间,系统的相应被限制在了图 2.11所示的阴影边界之中。可以说明包含了这些阶跃响应限制条件系统在任何输入的情况下的动态响应都是可接受的。动态性能指标的定义如下图所示:图2.11 单位阶跃响应性能指标1.延迟时间:定义响应从0到稳态值的50%所需要的时间称为延时时间,如图2.11所示。2.超调量:阶跃响应的峰值定义为M pt,达到峰值的时间称为T p,则,超调量百分数定义如下:式中:Css稳态值或终值c(t)3.调整时间:定义为输出均匀的达到位于稳态输出值的两侧或一侧的均匀的范围之内所经历的时间,特别的,此处的范围可指定为:±5%、±2%或者±1%,分别对应的调整时间。同样,约束条件可以从系统的频率响应得出。大的带宽意味着系统可以跟随迅速变化的输入(信号包含了其傅里叶变换形式中的高频部分),频率响应中大的谐振峰值意味着动态响应中的欠阻的正弦曲线。因此,闭环系统频率响应的带宽B和谐振峰值的高度Mp能够大概对应地指示系统的性能指标中的延迟时间和超调量。这些参数的性能指标限制区域内闭环系统频率响应的量级如图2.12所示。闭环系统的带宽并不能方便的反应性能指标,响应频率ωr通常仅仅应用于频率响应的领域。一个可选择的用于限制频域动态响应的方法是规定最小的增益裕量与相角裕量,这种方法仅仅适用于开环系统。图2.12 闭环频率响应指标以下是三组备选的关于动态响应性能指标的常用设置:1.闭环阶跃响应:延迟时间(或上升时间),超调量,调整时间。2.闭环频率响应:谐振峰值,带宽或谢振频率。3.开环频率响应:增益裕量,相角裕量。2.2 二阶系统由频域观点可知,系统需要考虑闭环系统传递函数分母中s的最高次,时域中,需要考虑描述系统动态特性的被控参数的最高阶导数。描述系统时,系统的阶数事非常重要的参数。二阶系统对于控制工程而言非常重要。这种形式的系统描述了许多控制程序的动态特性,如伺服系统,空间驾驶控制,化工过程,生物工程,飞机控制系统,轮船控制等。值得关注的是很多控制系统的设计都是基于二级系统进行分析的。虽然常见的控制系统都是高阶的,但是这些系统可以近似成二阶系统,在合理的精确度范围之内对系统进行近似以实现准备的设计目标。更加精确的解决方案可以通过二阶系统的性能上延伸来实现。我们以直流电机通过变速箱拖动负载的系统为例来研究。这种系统很常见,用一个共同的拉普拉斯变换的数学描述形式描述了机械与电子理论的结合。该系统的原理图如图 2.13所示。在该装置中,系统的设定值通过电位器的形式产生。电位器的角位置θd 通过电位器的传递函数Kp(单位:伏/弧度)产生一个成比例的双极性电压。这个电压与另外一个电位器测量的负载达到的位置进行比较。电位计与相加点的系统框图如图2.14所示。由于电动机需要的电压比从求和点直接获得的电压大,所以偏差电压一般情况下都通过一个放大器接到电动机上。放大器可看做一个在大多数情来看待,传递函数如图2.14所示。放大器输出电压驱动电动况下可调节的增益Ka机。应当知道的是电动机之所以旋转是由于两个磁场相互作用的结果,两个磁场一个是静止的而另外一个是旋转的,电机的调速通过控制这两个磁场其中一个的强度来实现。静止磁场的产生可以通过给励磁线圈通电流来实现,对于小型电机,可以通过使用永久磁铁来产生静止磁场。旋转磁场可以通过为电枢线圈通电流产生。根据基尔霍夫定律以及牛顿第二定律,可得电动机的传递函数如下:为电机转矩系数,单位式中:R为励磁绕组的电阻;L为励磁绕组的电感;Km是:N2/A;J为电机轴的转动惯量;c为总阻尼,包括电机轴的。图2.13 电机位置负载图2.14 位置控制系统框图引入图2.14右侧,则闭环传递函数可写为:将电位器的KP从该式可以看出关于系统的输入与输出之间关系的微分方程是二阶的;因此位置控制系统是二阶的。二阶系统的标准形式如下:表示无阻尼自然振荡角频率。系统可以通过这些量描述。式中:ζ表示阻尼比,ωn随后的系统分析将使用一些广义上的符号,系统框图如图2.25所示,通过回顾电机控制,位置控制系统将不断地以物理为基础得出结论。图2.15 广义闭环传递函数阶跃响应我们假设系统处于零初始状态,并且输入为单位阶跃。那么R(s)=1/s,输出的拉普拉斯变换可以写成:若系统为欠阻尼,即ζ<1,那么,阻尼自然振荡角频率定义为:接着输出结果为:进行反变换后:式中:同理,可以得出过阻尼(ζ>1)情况下的结果:理解阻尼时的结果(ζ=1):图2.16所示为在ω=1rad/s情况下,不同阻尼比ζ时的输出,识别ζ<1时n的情况很重要,如下图:图2.16 二阶系统阶跃响应1.在ωd时,系统震荡2.系统由于指数-ζωn而衰减震荡,超调量取决于ζ的值3. .4.5.。
自动化专业英语课文重点句子翻译(精)
In the case of a resistor, the voltage-current relationship is given by Ohm’s law, which states that the voltage across the resistor is equal to the current through the resistor multiplied by the value of the resistance.就电阻来说, 电压—电流的关系由欧姆定律决定。
欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
2]It may be that the inductor voltage rather than the current is the variable of interest in the circuit. 或许在电路中,人们感兴趣的变量是电感电压而不是电感电流。
Viewed in this light, it will be found that the analysis of three-phase circuits is little more difficult than that of single-phase circuits.这样看来,三相电路的分析比单相电路的分析难不了多少。
At unity power factor, the power in a single-phase circuit is zero twice each cycle.在功率因数为 1时,单相电路里的功率值每个周波有两次为零。
It should be noted that if the polarity of point Awith respect to N ( is assumed for the positive half-cycle, then when used in the same phasor diagram should be drawn opposite to, or 180? out of phase with, .应该注意,如果把 A 点相对于 N 的极性(定为正半周,那么在用于同一相量图中时就应该画得同相反,即相位差为 180?One problem with electronic devices corresponding to the generalized amplifiers is that the gains, AU or AI, depend upon internal properties of the two-port system.对应于像广义放大器这样的电子装置,一个问题就是增益 AU 或者 AI ,它们取决于两输入端系统的内部特性。
自动化专业英语中英文对照

自动化专业英语中英文对照retarding torque 制动转矩inductive component 感性(无功)分量abscissa axis 横坐标induction generator 感应发电机synchronous generator 同步发电机automatic station 无人值守电站hydropower station 水电站process of self – excitation 自励过程auxiliary motor 辅助电动机technical specifications 技术条件voltage across the terminals 端电压steady – state condition 瞬态暂态reactive in respect to 相对….呈感性active in respect to 相对….呈阻性synchronous condenser 同步进相(调相)机coincide in phase with 与….同相synchronous reactance 同步电抗algebraic 代数的algorithmic 算法的biphase 双相的bilateral circuit 双向电路bimotored 双马达的corridor 通路shunt displacement current 旁路位移电流leakage 泄漏lightning shielding 避雷harmonic 谐波的insulator string 绝缘子串neutral 中性的zero sequence current 零序电流sinusoidal 正弦的square 平方corona 电晕,放电bypass 旁路voltmeter 电压表ammeter 电流表micrometer 千分尺thermometer 温度计watt-hour meter 电度表wattmeter 电力表private line 专用线路diameter 直径restriking 电弧再触发magnitude 振幅oscillation 振荡auxiliary 辅助的protective gap 保护性间隙放电receptacle 插座lightning arrester 避雷装置bushing 套管trigger 起动装置stress 应力deterioration 损坏,磨损spark gap 火花放电隙traveling-wave 行波wye-connected 星形连接enclosure 设备外壳live conductor 带电导体fuse 熔断器structural 结构上的out-of-step 不同步的resynchronize 再同步synchroscops 同步指示器automatic oscillograph 自动示波器nominally 标称sampling 采样potential transformer 电压互感器fraction 分数switchyard 户外配电装置hazard 危险bushing 高压套contact 触点energize 励磁trip coil 跳闸线圈over-current relay 过电流继电器armature 衔铁pickup current 始动电流release current 释放电流solenoid relay 螺管式继电器induction-disc relay 感应圆盘式继电器inverse time relay 反时限继电器hydraulic 液力的dashpot 阻尼器pneumatic 气动的permanent magnet 永磁体electrical stressing 电气应力deviation 偏差third harmonic voltage 三次谐波电压induction machine 感应式电机horseshoe magnet 马蹄形磁铁magnetic field 磁场eddy current 涡流right-hand rule 右手定则left-hand rule 左手定则slip 转差率induction motor 感应电动机rotating magnetic field 旋转磁场winding 绕组stator 定子rotor 转子induced current 感生电流time-phase 时间相位exciting voltage 励磁电压solt 槽lamination 叠片laminated core 叠片铁芯short-circuiting ring 短路环squirrel cage 鼠笼rotor core 转子铁芯cast-aluminum rotor 铸铝转子bronze 青铜horsepower 马力random-wound 散绕insulation 绝缘ac motor 交流环电动机end ring 端环alloy 合金coil winding 线圈绕组form-wound 模绕performance characteristic 工作特性frequency 频率revolutions per minute 转/分motoring 电动机驱动generating 发电per-unit value 标么值breakdown torque 极限转矩breakaway force 起步阻力overhauling 检修wind-driven generator 风动发电机revolutions per second 转/秒speed-torque curve 转速力矩特性曲线plugging 反向制动synchronous speed 同步转速percentage 百分数locked-rotor torque 锁定转子转矩full-load torque 满载转矩prime mover 原动机inrush current 涌流magnetizing reacance 磁化电抗line-to-neutral 线与中性点间的staor winding 定子绕组leakage reactance 漏磁电抗no-load 空载full load 满载Polyphase 多相(的)iron-loss 铁损complex impedance 复数阻抗rotor resistance 转子电阻leakage flux 漏磁通locked-rotor 锁定转子chopper circuit 斩波电路separately excited 他励的compounded 复励dc motor 直流电动机de machine 直流电机speed regulation 速度调节shunt 并励series 串励armature circuit 电枢电路optical fiber 光纤interoffice 局间的waveguide 波导波导管bandwidth 带宽light emitting diode 发光二极管silica 硅石二氧化硅regeneration 再生, 后反馈放大coaxial 共轴的,同轴的high-performance 高性能的carrier 载波mature 成熟的Single Side Band(SSB) 单边带coupling capacitor 结合电容propagate 传导传播modulator 调制器demodulator 解调器Amplitude Modulation(AM 调幅Frequency Shift Keying(FSK) 移频键控tuner 调谐器attenuate 衰减incident 入射的two-way configuration 二线制generator voltage 发电机电压dc generator 直流发电机polyphase rectifier 多相整流器boost 增压time constant 时间常数forward transfer function 正向传递函数error signal 误差信号regulator 调节器stabilizing transformer 稳定变压器time delay 延时direct axis transient time constant 直轴瞬变时间常数transient response 瞬态响应solid state 固体buck 补偿operational calculus 算符演算gain 增益pole 极点feedback signal 反馈信号dynamic response 动态响应voltage control system 电压控制系统mismatch 失配error detector 误差检测器excitation system 励磁系统field current 励磁电流transistor 晶体管high-gain 高增益boost-buck 升压去磁feedback system 反馈系统reactive power 无功功率feedback loop 反馈回路automatic Voltage regulator(AVR)自动电压调整器reference Voltage 基准电压magnetic amplifier 磁放大器amplidyne 微场扩流发电机self-exciting 自励的limiter 限幅器manual control 手动控制potential transformer 电压互感器stabilization network 稳定网络stabilizer 稳定器air-gap flux 气隙磁通saturation effect 饱和效应saturation curve 饱和曲线flux linkage 磁链per unit value 标么值shunt field 并励磁场magnetic circuit 磁路load-saturation curve 负载饱和曲线air-gap line 气隙磁化线polyphase rectifier 多相整流器circuit components 电路元件circuit parameters 电路参数electrical device 电气设备electric energy 电能primary cell 原生电池energy converter 电能转换器conductor 导体heating appliance 电热器direct-current 直流time invariant 时不变的self-inductor 自感mutual-inductor 互感the dielectric 电介质storage battery 蓄电池e.m.f = electromotive fore 电动势unidirectional current 单方向性电流circuit diagram 电路图load characteristic 负载特性terminal voltage 端电压external characteristic 外特性conductance 电导volt-ampere characteristics 伏安特性carbon-filament lamp 碳丝灯泡ideal source 理想电源internal resistance 内阻active (passive) circuit elements 有(无)源电路元件leakage current 漏电流circuit branch 支路P.D. = potential drop 电压降potential distribution 电位分布r.m.s values = root mean square values 均方根值steady direct current 恒稳直流电sinusoidal time function 正弦时间函数complex number 复数Cartesian coordinates 笛卡儿坐标系modulus 模real part 实部imaginary part 虚部displacement current 位移电流trigonometric transformations 瞬时值epoch angle 初相角phase displacement 相位差signal amplifier 小信号放大器mid-frequency band 中频带bipolar junction transistor (BJT) 双极性晶体管field effect transistor (FET) 场效应管electrode 电极电焊条polarity 极性gain 增益isolation 隔离分离绝缘隔振emitter 发射管放射器发射极collector 集电极base 基极self-bias resistor 自偏置电阻triangular symbol 三角符号phase reversal 反相infinite voltage gain 无穷大电压增益feedback component 反馈元件differentiation 微分integration 积分下限impedance 阻抗fidelity 保真度summing circuit 总和线路反馈系统中的比较环节Oscillation 振荡inverse 倒数admittance 导纳transformer 变压器turns ratio 变比匝比ampere-turns 安匝(数)mutual flux 交互(主)磁通vector equation 向(相)量方程power frequency 工频capacitance effect 电容效应induction machine 感应电机shunt excited 并励separately excited 他励self excited 自励field winding 磁场绕组励磁绕组speed-torque characteristic 速度转矩特性dynamic-state operation 动态运行salient poles 凸极excited by 励磁field coils 励磁线圈air-gap flux distribution 气隙磁通分布direct axis 直轴armature coil 电枢线圈rotating commutator 旋转(整流子)换向器commutator-brush combination 换向器-电刷总线mechanical rectifier 机械式整流器armature m.m.f. wave 电枢磁势波Geometrical position 几何位置magnetic torque 电磁转矩spatial waveform 空间波形sinusoidal – density wave 正弦磁密度external armature circuit 电枢外电路instantaneous electric power 瞬时电功率instantaneous mechanical power 瞬时机械功率effects of saturation 饱和效应reluctance 磁阻power amplifier 功率放大器compound generator 复励发电机rheostat 变阻器self – excitation process 自励过程commutation condition 换向状况cumulatively compounded motor 积复励电动机operating condition 运行状态equivalent T – circuit T型等值电路rotor (stator) winding 转子(定子绕组)winding loss 绕组(铜)损耗prime motor 原动机active component 有功分量reactive component 无功分量electromagnetic torque 电磁转矩。
自动化专业英语原文和翻译

自动化专业英语原文和翻译Title: Original and Translation of Professional English in AutomationIntroduction:In the field of automation, understanding and mastering professional English is essential for communication, research, and development. This article will discuss the importance of original and translated professional English in automation and provide detailed explanations of key terms and concepts.1. Original Professional English:1.1 Understanding technical terms: Original professional English in automation often includes technical terms that are specific to the field. It is important to understand the meaning of these terms in order to effectively communicate and collaborate with others in the industry.1.2 Reading research papers: Many research papers in automation are written in English, so it is crucial to be able to read and understand them in order to stay up-to-date with the latest developments in the field.1.3 Writing reports and documentation: In automation, professionals are often required to write reports, documentation, and technical manuals in English. Having a strong grasp of original professional English is necessary for effectively conveying information to colleagues and clients.2. Translation of Professional English:2.1 Accuracy in translation: When translating professional English in automation, it is crucial to ensure accuracy in order to avoid misunderstandings and errors. Professional translators with expertise in the field are often needed to provide accurate translations.2.2 Translating technical documents: Translating technical documents, such as user manuals and specifications, requires a deep understanding of both the technical contentand the nuances of the English language. Translators must be able to convey complex information clearly and accurately.2.3 Localization: In addition to translation, localization is often necessary in order to adapt professional English in automation to different cultural and linguistic contexts. This involves not only translating text, but also adapting it to suit the preferences and needs of the target audience.3. Importance of Professional English in Automation:3.1 Global communication: Automation is a global industry, and professionals must be able to communicate effectively with colleagues, clients, and partners from around the world. Professional English is often the common language used in these interactions.3.2 Career advancement: Proficiency in professional English can open up opportunities for career advancement in automation. Being able to read, write, and speak English fluently can give professionals a competitive edge in the industry.3.3 Access to resources: Many resources, such as research papers, technical manuals, and online courses, are only available in English. Proficiency in professional English allows professionals in automation to access these resources and stay informed about the latest developments in the field.4. Challenges in Professional English in Automation:4.1 Technical complexity: Professional English in automation can be highly technical and complex, making it challenging for non-native English speakers to understand and communicate effectively.4.2 Terminology consistency: The terminology used in automation can vary between different countries and regions, leading to confusion and misunderstandings. Consistent use of terminology is crucial for effective communication in the field.4.3 Cultural differences: Cultural differences can also impact the use of professional English in automation. Translators and professionals must be aware of cultural nuances in order to accurately convey information and avoid misunderstandings.5. Tips for Improving Professional English in Automation:5.1 Practice reading and writing: Reading research papers, technical manuals, and other professional documents in English can help improve proficiency in professional English in automation.5.2 Attend workshops and training: Workshops and training programs focused on professional English in automation can help professionals improve their language skills and stay up-to-date with industry trends.5.3 Seek feedback: Asking for feedback from colleagues, mentors, and language experts can help professionals identify areas for improvement and enhance their proficiency in professional English.Conclusion:In conclusion, mastering professional English in automation is essential for communication, research, and development in the field. Understanding the importance of original and translated professional English, as well as the challenges and tips for improvement, can help professionals in automation enhance their language skills and succeed in their careers.。
自动化专业英语翻译

Fourteen Steps to a Clearly Written Technical Paper 十四个步骤明确书面技术论by R. T. Compton, Jr.A technical paper will usually have four sections. The purpose of each of these sections is as follows:技术论文技术通常会有四个部分,如下:Section I: IntroductionThe introduction should do the following:1. Open up the subject. (The subject will be electromagnetic fields in cylindrical dielectric geometrics, adaptive arrays in packet radio, or whatever.)2. Survey past work relevant to this paper.3. Describe the problem addressed in this paper, and show how this work relates to, or augments, previous work.4. Describe the assumptions made in general terms, and state what results have been obtained. (This gives the reader an initial overview of what problem is addressed in the paper and what has been achieved.)5. Overview the contents of the paper. (“Section II contains our formulation of the problem. Section III contains the experimental data...”)第一步:介绍应做以下介绍:1。
第三版,化学工业出版社。-自动化专业外语翻译,王树青编。第一章第四节翻译
1.4 过程控制系统的设计1.“好的设计”很难定义,但通常你会认可一些好的设计。
好的设计的一个特征是,它恰好适用于特定的场合。
包括所有需要的,而排除一切所不需要的。
1.好的设计所需要的技巧包括经验、直觉和敏锐的感觉。
这些从课本中并不容易学到。
在设计方面,你最应该从教科书中期望得到的是学到一些有用的工具。
1.就像大多数关于控制系统设计的书一样,本书提供了一些能够被简化成数学公式的工具:分析和仿真。
其它方面的设计技巧(比如整个系统的概念化,部件的选型,处理时间和金钱上的限制等)也像数学分析一样重要,可以通过实践经验不断获得和完善。
1.实际上,大多数系统都通过进化发展的,不仅是生物系统,人类的发明,如汽车和飞机也是这样。
豪华而高性能的汽车可以追溯到简单的T模型;最先进的,甚至只出现在承包商的画板上的战斗机,也是起源于老式的“小鹰”飞机。
1.很多工程是把现有的设计做进一步修改。
现有产品的新型号设计就是引进新的先进技术:一个新型的或改进的传感器或执行器,一个用于替换模拟控制器的数字处理器。
1.模仿法(常被称为反转工程)是另一种常用的设计方法。
通过这种最明显但也最缺乏创意的方法,你可以仔细研究现有产品,然后复制设计方法。
这个过程是合法的,除非产品复制受专利保护。
2.更有创意的模仿法是将一个产品的思想应用到其它领域中去。
当你需要控制容器中的液位时,可以考虑一下在你的厕所中这是怎样实现的。
当你要控制容器中的液体温度时,可以考虑一下你的热带鱼缸是如何做到的。
1.创新总是受规范、标准和工程保守主义的限制。
例如,飞机制造厂用了许多年才接受了“靠电线飞行”的概念,“靠电线飞行”使飞行员控制器(如操纵杆和脚踏板)和可移动的空气动力控制翼面(如方向舵,升降机和副翼)之间的机械连接(如连杆或绳索)被携带信号的电线所取代。
电线把信号从驾驶员控制器传递给飞行控制计算机,然后从计算机传递给位于控制翼面的执行器。
2.尽管工程标准会延迟发展,但在防止技术混乱上仍然是必要的。
自动化专业英语教程Part3U1翻译

P3U1A Computer Structure and Function 第三部分第一单元课文A计算机的结构与功能A 计算机的结构与功能1.课文内容简介:主要介绍《计算机原理》中四个必要部件:存储器、中央处理单元(CPU,或简称处理器),外部处理器总线,输入/输出系统的结构、功能和作用等内容。
2.温习《微机原理》中有关计算机基本结构的内容。
4. 难句翻译[1] …how the instruction execution cycle is broken do wn into its various components.……指令执行周期怎样分解成不同的部分。
[2] One way to achieve meaningful patterns is to divide up the bits into fields…一种得到(指令)有效形式的方法是将(这些)位分成段……[3] The majority of computer tasks involve the ALU, but a great amount of data movement isrequired in order to make use of the ALU instructions.计算机的大多数工作涉及到ALU(逻辑运算单元),但为了使用ALU指令,需要传送大量的数据。
5. 参考译文A 计算机的结构与功能这一节介绍计算机的内部体系结构,描述了指令如何存储和译码,并解释了指令执行周期怎样分解成不同的部分。
从最基本的水平来讲,计算机简单执行存储在存储器中的二进制编码指令。
这些指令按照二进制编码数据来产生二进制编码结果。
对于通用可编程计算机,四个必要部件是存储器、中央处理单元(CPU,或简称处理器),外部处理器总线,输入/输出系统。
图 3-1A-1 计算机的基本元件存储器储存指令和数据。
CPU读取和解释指令,读每条指令所需的数据,执行指令所需的操作,将结果存回存储器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第1章工业过程控制原理近年来,工艺装置的性能要求已变得越来越难以满足。
更激烈的竞争,更加严格的环保和安全法规和瞬息万变的经济环境已经在收紧厂的产品质量标准的关键因素。
更复杂的是,现代化的进程变得更加难以操作,因为更大,更高度集成的植物更小的浪涌能力之间的各种处理单元的趋势。
这些植物给运营商很少有机会能防止翻倒从一台设备传输到其他互联单位。
鉴于放置在安全的越来越重视。
高效的工厂运营,这是很自然的主题,过程控制,在最近几年变得越来越重要。
事实上,在没有过程控制中,就成了不能够操作最现代化过程安全,有益,同时满足植物的质量标准。
1.1.1举例说明作为一个引进的过程控制。
考虑在图所示的连续搅拌槽加热器。
1。
1。
1的进气口的液体流具有的质量流量w和温度T。
搅拌罐内容,并提供问答瓦的电加热器加热。
据推测,在入口和出口的流率是相同的,液体密度p保持恒定的,即是在温度变化足够小,可以忽略不计的温度依赖性的p。
在这些条件下,液体在槽中的体积V保持恒定。
搅拌罐的加热器的控制目标是保持的出口温度T在恒定的参考值TR。
的基准值被称为对照术语作为设定点。
接下来,我们考虑两个问题。
问题1。
多少热量必须被供给到搅拌槽加热器加热的液体从入口温度T,的出口温度TR?要确定所需的热量输入,为设计工况条件下,我们需要写一个稳态能量平衡的液体在槽中。
在写这种平衡,它假定罐被完全混合,听到的损失是可以忽略不计。
在这些条件下有制作人:中国石油大学(华东)信控学院xueyue内的排名的内容是没有温度梯度,因此,出口温度是罐中的液体的温度相等。
甲稳态能量平衡罐表明添加的热等于焓变化之间在入口和出口流:Q = WC(T-Ti)的(1)其中,Ti的Tw和Q表示体的Tw和Q的额定稳态设计值。
和C是比热的液体。
我们假设,C为常数。
在设计条件下,T = TR(设定点)。
这种替代式。
(1)给出的表达式{或标称输入热量Q = WC(TR-T)(2)方程(2)是对听者的设计方程。
如果我们的假设是正确的,如果在入口流率和入口温度等于其nomin81值,然后由方程给出的热输入。
(2)的出口温度保持在所需的值,TR。
但是,如果条件发生变化吗?这给我们带来了第二个问题:Quesrion2。
假设入口温度Ti随时间的变化。
我们怎样才能保证T保持在设定点附近TR吗?作为一个具体的例子。
承担的Ti提高到一个新的值大于钛,如果Q是保持不变的人的名义Q值,我们知道,出口温度将增加,使T> TR。
(cf.Eq.(1))。
为了对付这种情况,也有一些可能的策略用于控制退出温度T。
方法。
测量T和调Q。
的一种方式控制T,尽管这件T干扰。
调Q根据T.直观地测量,如果T是太高,我们应该减少Q; T是太低了,我们应加大控制策略往往会问:这移动Ţ朝向的设定点(TR)和可以在许多不同的方式实施。
例如,工厂操作员可以观察测得的温度,并比较测量值到TR。
然后,操作员会以适当的方式变化q。
这将是一个手动控制的应用。
但是,它可能会更方便,更经济,有这个简单的控制任务的电子设备,而不是一个人,那就是,利用自动控制自动执行。
方法2。
测量钛调整问:作为另一种合作方式l。
我们可以测量变量T和相应的调Q。
因此,如果Ti 大于钛,我们将减少Q;为钛<Ti我们将设置Q> Q.方法3。
测量T调整W,而不是调整问:我们可以选择操作质量流量W。
因此。
如果T是太高,我们会增加w来降低相的质量流率的搅拌罐中的能量输入速率,从而降低出口温度。
方法4。
钛调整w在的类比方法3,如果这也是高的措施。
W应增加。
方法5。
测量的Ti和T。
调整Q。
此方法是方法1和2的组合。
方法6。
测量Ti和T,调整瓦特。
这种方法是一种方法3和4的组合。
方法7。
放置一个热交换器的入口流。
的热交换器,是为了减少在T中的干扰,从而降低T中的变化,这种方法有时被称为“猪tieing”输入。
制作人:中国石油大学(华东)信控学院xueyue方法8。
使用较大的坦克。
如果使用更大范围内的排名,T中的波动我们由于罐内容物的较大的热容,将趋向于被阻尼。
不过量的增加油罐的工业厂房,由于资本成本增加较大的坦克将是一个昂贵的解决方案。
注意,此方法是类似于大的热电容的浴作为散热片在化学实验室的水浴中的使用,从而提供了一个小规模的研究装置的等温环境。
1.1.2控制策略的分类下一步,我们将上一节的8个控制策略进行分类,并讨论它们的相对优势和劣势。
方法1和3的反馈控制策略的例子。
在反馈控制中,要被控制的过程变量的测量和测量另一个进程可以被操纵的变量,该变量是用来调整。
因此,对于方法1,测量变量是T和操纵变量问:对于方法3,测量变量仍然是,但由操纵变量是现在w。
需要注意的是在反馈控制干扰变量钛也没有测量。
使负反馈和正反馈的负反馈是指理想情况下,由控制器采取的纠正措施,是指移动朝向设定点的控制变量之间的区别是很重要的。
与此相反。
当存在正反馈时,控制器往往会使事情变得更糟,迫使远离设定点的控制变量。
因此,的搅拌罐加热器,如果T是过高的,我们将减少Q(负反馈),而不是增加Q(正反馈)。
方法2和图4是前馈控制策略。
这里的扰动变量T,被测量并用来操纵任一Q(方法2)或w(方法4)。
请注意,前馈控制中,控制变量T还没有测量。
方法图5是一个前馈- 反馈控制策略,因为它是一个相结合的方法1和2。
同样,方法图6是一个前馈- 反馈控制策略,因为它是一个相结合的方法3和4。
方法7和第8包括设备的设计变化,因而没有真正的控制策略。
请注意,方法图7是有点不合适的,因为它涉及的搅拌罐加热器,这本身就被设计为作为热交换器的功能添加一个热交换器的入口管线!总结于表1.1.1搅拌罐加热器的控制策略表1.1.1搅拌式加热器的温度控制策略方法测量变量可调节变量类别1ŢQFB2钛QFF3Ţ瓦特FB4钛瓦特5钛和TQFF / FB6钛和T瓦特FF / FB7--设计变更8--设计变更到目前为止,我们只考虑过程干扰的来源之一,钛波动我们也应该考虑是否有可能在其他过程变量的干扰,如环境温度,这会影响坦克的热损失。
回想一下,热损失可以忽略不计早期。
工艺设备的变化是另一个可能的来源制作人:中国石油大学(华东)信控学院xueyue干扰。
例如,加热器的特性随着时间的推移,由于液体的缩放,可以改变。
它是信息审查的影响上的前馈和反馈控制策略上面所讨论的,这些不同类型的干扰。
首先,考虑前馈控制策略,方法2的骚乱T,计量和测量的结果用来调整的的操纵变量问:从理论的角度来看,这种控制方案是能够保持完全的控制变量T在设定点TR尽管干扰钛理想的情况下,如果准确的测量结果T,是avail8ble的,如果在Q的调整以适当的方式,然后由加热器采取的纠正措施,取消了前T的扰动的影响影响。
因此,在原则上,前馈控制是能够提供完善的控制,在这个意义上,将保持在设定点的控制变量。
但是,如何将这种前馈控制策略执行,如果骚乱发生在其他过程变量?特别地,假定的流速w可以被保持恒定,但是,相反,随着时间的推移而变化。
在这种情况下RW将被视为一个干扰变量。
如果w的增加,然后将出口温度T将减少,除非加热器供给更多的热量。
然而,在方法2的热输入的控制策略,Q被保持恒定,只要为T是恒定的。
因此,没有采取纠正措施将,不可测量的气流扰动,原则上,我们可以处理这种情况,通过测量Ti和W,然后调Q,以弥补这些干扰。
然而,作为一个实际问题,它一般是不经济的尝试来测量的alt潜在干扰。
这将是更实际的使用的组合进料正向反馈控制系统,由于反馈控制提供不可测量的干扰,如下面所讨论的纠正措施。
因此,在工业应用中的前馈控制中,通常使用具有反馈控制组合使用。
下一步,我们将考虑如何反馈控制策略的方法L执行中存在的干扰钛或W。
如果方法1,没有任何的动作会出现,直到后的干扰破坏的过程。
也就是说,直到后钛从TR不同。
因此,通过其固有的性质,反馈控制是不能够完美的控制,因为之前采取纠正措施,控制变量mu.st的偏离设定点。
然而,反馈控制的一个极其重要的优点是,采取纠正行动不管干扰源。
因此,在方法升。
将采取纠正措施(调Q)的干扰后的Ti或不带T的偏离设定点。
来历不明的处理不可测量的干扰的能力,是一个反馈控制器已广泛用于过程控制的重要原因。
(选择【过程动态控制】D.Seborg T.Edgar JOHN WILEY&Sons.1989)撤消修改。