最优控制理论教学设计
《最优控制》教学大纲-hyq
第四章极小值原理及其应用(6学时)
4.1连续系统的极小值原理(2学时)
4.2最短时间控制问题(1学时)
4.3最少燃料控制问题(1学时)
4.4离散系统的极小值原理(2学时)
第五章线性系统二次型指标的最优控制——线性二次型问题(6学时)
5.1引言
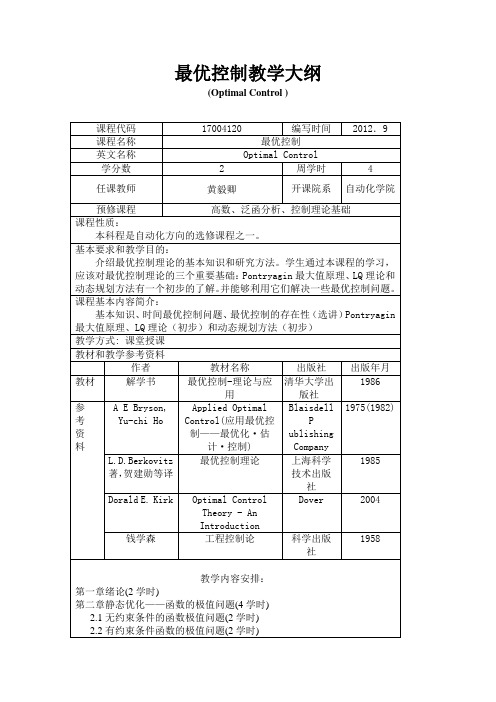
最优控制教学大纲
(Optimal Control
课程代码
17004120
编写时间
2012.9
课程名称
最优控制
英文名称
Optimal Control
学分数
2
周学时
4
任课教师
黄毅卿
开课院系
自动化学院
预修课程
高数、泛函分析、控制理论基础
课程性质:
本科程是自动化方向的选修课程之一。
基本要求和教学目的:
介绍最优控制理论的基本知识和研究方法。学生通过本课程的学习,应该对最优控制理论的三个重要基础:Pontryagin最大值原理、LQ理论和动态规划方法有一个初步的了解。并能够利用它们解决一些最优控制问题。
Applied Optimal Control(应用最优控制——最优化·估计·控制)
Blaisdell P ublishing Company
1975(1982)
L.D.Berkovitz著,贺建勋等译
最优控制理论
上海科学技术出版社
1985
Dorald E. Kirk
Optimal ControlTheory - An Introduction
5.2终端时间有限时连续系统的状态调节器问题(2学时)
5.3稳态时连续系统的状态调节器问题(2学时)
最优控制理论与系统第三版教学设计 (2)
最优控制理论与系统第三版教学设计课程简介本课程是介绍最优控制理论与系统的基础知识,主要包括状态空间法、优化控制、最优化方法、动态规划等方面的内容。
前置知识•线性代数•微积分学•控制理论基础•Matlab编程基础教学目标•掌握最优控制基本知识和方法;•理解状态空间模型和其在控制系统中的应用;•熟悉优化方法,如最小二乘、线性规划、非线性规划等;•掌握动态规划的基本概念和应用。
教材《最优控制理论与系统第三版》韩子昂,陈锡文著教学内容第一章引言•课程简介•教材介绍第二章状态空间法•模型描述–动态系统与状态方程–状态变量与状态空间•基本概念–可观性与可控性–稳定性判据第三章优化控制•范畴与概念•线性二次型调节器–离散时间系统–连续时间系统•数字计算算法第四章最优化方法•最小二乘问题•线性规划问题•非线性规划问题第五章动态规划•基本概念•离散时间动态规划–最优子结构–递推式的建立–递推法解决离散时间动态规划问题•连续时间动态规划第六章总结与测试•课程总结•测试与准备教学方法•课堂讲授:通过理论讲解,引导学生了解控制原理,在讲解过程中会有举例和计算操练。
•组织讨论:通过设计控制问题,组织学生进行讨论并解决实际问题。
•课外作业:课堂讲授之后,要求学生完成作业,加深对理论知识的理解和掌握。
考核方式•课堂测试:考察学生掌握情况,包括课堂讲解内容和作业题目。
•期末考试:考查学生对整个课程的掌握程度,考试形式为书面考试和机试。
参考文献•韩子昂,陈锡文. 最优控制理论与系统第三版[M]. 科学出版社, 2016.•余志豪. 最优控制理论与应用[M]. 北京大学出版社, 2002.•Bryson, A. E., & Ho, Y. C. (1975). Applied optimal control: optimization, estimation, and control[M]. CRC press.。
现代控制理论 第6章 最优控制(校内讲稿)1

2)终端型性能指标( 梅耶问题)
J x( t f )或J x( N )
3)综合型性能指标( 鲍尔扎问题)
J x ( t f ) Lx t ,ut ,t dt
终端指标
t
f
或J x( N )
N 1 k k 0
t0
L [ x( k ),u( k ),k ]
2.拉格朗日乘子法 设目标函数:
n维
x( tk 1 ) f [ x( tk ),u( tk ),tk ] n N倍
N 1 L k 0
J x( N ) 约束条件为:
x( k ), u( k ), k
( k 0 ,1, N 1 )
f [ x( k ), u( k ), k ] x( k 1 ) 0
6.9
Bang-Bang控制
总目录 章目录 返回
上一页 下一页
教学要求: 1. 学习泛函变分法,理解最优控制的一般概念 2. 掌握利用变分法求最优控制方法 3.掌握状态调节器,极小值原理
重点内容: •最优控制的一般问题及类型,泛函与变分,欧拉 方程,横截条件。 •变分法求有约束和无约束的最优控制。 •连续系统的极小值原理。 •有限和无限时间状态调节器方法,Riccati方程求 解。
爬山法 梯度法
总目录 章目录 返回
上一页 下一页
6.3 静态最优化问题的解
6.3.1 一元函数的极值
设: f ( u ) a , b 上的单值连续可微函数 J 则1) u为极小值点的充要条件
f ( u ) |u u 0
f ( u ) |u u 0
f ( u ) |u u 0
H f ( g )T 0 x x x H f ( g )T 0 u u u H g ( x ,u )0
控制理论与最优化教案

控制理论与最优化教案一、引言在当今社会发展的快速变化中,控制理论和最优化技术日益成为实现高效、稳定和可持续发展的关键要素。
控制理论是研究如何根据系统的目标和约束条件来设计和实施操控方案的学科,而最优化技术则是寻找系统最优解或接近最优解的方法。
本教案旨在介绍控制理论与最优化的基本概念、原理和应用,以帮助学生全面了解和掌握相关知识和技能。
二、教学目标1. 理解控制理论和最优化的基本概念和原理;2. 掌握控制理论和最优化的基本方法和技术;3. 能够运用控制理论和最优化方法解决实际问题;4. 培养学生的创新思维和问题解决能力。
三、教学内容第一章:控制理论基础1.1 控制系统的定义与分类1.2 控制系统建模与分析1.3 反馈控制与前馈控制1.4 控制系统的性能评价指标第二章:最优化基础2.1 最优化问题的定义2.2 线性规划与整数规划2.3 最优化算法与数学优化方法2.4 最优化在工程和管理中的应用第三章:控制理论与最优化的结合3.1 控制系统的最优化设计3.2 鲁棒控制与最优控制的关系3.3 控制理论与最优化在自动化系统中的应用案例四、教学方法与手段4.1 理论讲授:通过讲解控制理论和最优化的基本概念和原理,帮助学生建立起系统的知识框架;4.2 实例分析:通过分析实际问题和案例,引导学生运用控制理论和最优化方法解决问题;4.3 学生讨论:鼓励学生主动思考和互动交流,培养他们的创新思维和问题解决能力;4.4 实践操作:组织学生进行实践操作和仿真实验,加深对控制理论和最优化的理解和应用。
五、教学评价与考核5.1 平时表现评价:包括参与度、课堂表现、作业完成情况等;5.2 实验报告与作业:要求学生完成实验报告和课后作业,提高实际操作和问题解决能力;5.3 考试评估:通过期末考试对学生的知识掌握情况进行综合评估。
六、教学资源6.1 教科书:推荐教材《控制理论与最优化导论》;6.2 电子资源:提供相关课件、教学视频和参考文献。
OptimalControlTheoryAnIntoducti教学设计DoverPublicatio

Optimal Control Theory: An Introduction 教学设计背景介绍优化控制理论是一种解决最优控制问题的数学理论。
其应用十分广泛,例如机器人控制、航空航天、冶金、化学、经济学等领域。
本教学设计主要面向本科生或研究生,讲述优化控制理论的基本概念、数学基础和应用范围,旨在使学生能够理解和应用该理论。
教学目标•理解优化控制理论的基本概念和原理•掌握优化控制的常用方法和技术•能够应用优化控制理论解决实际问题•培养学生的数学建模和问题求解能力教学大纲第一章:引言•介绍优化控制理论的背景和应用•定义优化控制的基本概念和术语•简述本课程的教学目标和内容第二章:数学基础•线性代数基础•微积分基础•最优化理论基础第三章:最优控制问题的建模和求解•描述最优控制问题的一般形式•根据不同的问题类型选择不同的求解方法•常见求解工具和软件介绍第四章:最优控制的应用范围•机器人控制•航空航天•化学反应•经济学第五章:课程总结和教学反思•课程总结•教学反思和改进教学方法•课堂讲解和案例分析•基于实际问题的编程练习和分组讨论•课后阅读和研究论文教学评估•出席率•作业、小测验和编程练习成绩•期末考试参考教材•Bryson, A. E., & Ho, Y. C. (1975). Applied optimal control: optimization, estimation, and control (Vol. 1). Taylor & Francis.•S. Ross’s Introduction to Optimal Control Theory and Applications (1996, 2017).•李浩波《最优控制理论与应用》(2007)。
结束语优化控制理论是一种十分实用的数学理论,在工程和科学领域有广泛的应用。
本课程旨在为学生提供一种宏观的视角和深入的理解,使他们能够在实际应用中灵活运用该理论来解决复杂问题。
最优化方法与最优控制课程设计

最优化方法与最优控制课程设计一、设计背景随着现代科技的迅猛发展和社会竞争的加剧,各领域都需要越来越高效、精确、优化的设计方法和控制策略。
其中,最优化方法和最优控制技术是目前工程和科学领域中广泛应用的重要工具。
为了培养具有创新、实际和实践能力的工科人才,本次课程设计旨在通过对最优化方法和最优控制的讲解和实践,让学生更好地掌握和应用相关知识和技能。
二、设计目标通过本次课程设计,学生将会达到以下目标:1.掌握最优化方法和最优控制技术的基本理论和基本方法。
2.学会使用常见的数学建模软件,如Matlab等进行系统建模和仿真分析。
3.能够独立和团队完成一个小型的最优化或最优控制项目,提高实践能力和工程实践能力。
三、设计内容本次课程设计包含以下主要内容:1. 最优化方法最优化问题是在已知约束和目标函数的情况下,寻找能够使目标函数达到最大值或最小值的决策变量。
本部分主要包括以下内容:1.1. 常见最优化方法:线性规划、非线性规划、整数规划等。
1.2. 最优化算法:梯度下降法、共轭梯度法、拟牛顿法、遗传算法等。
1.3. 最优化软件:Matlab、Gurobi、CPLEX等。
2. 最优控制方法最优控制是指将控制问题描述为寻求使性能指标最优的动态过程。
本部分主要包括以下内容:2.1. 常见最优控制方法:最优控制基本原理、极小值原理与动态规划、Pontryagin最小值原理、最优控制的数值方法等。
2.2. 最优控制软件:Matlab、Simulink、LabVIEW等。
3. 课程设计环节选做题目:利用所学知识设计一个最优化或最优控制的小型项目,完成以下步骤:3.1. 对所选项目进行问题陈述和问题定义,明确项目的目标和指标。
3.2. 采用合适的数学建模方法,将该项目建立为数学模型。
3.3. 选择相应的最优化或最优控制方法,探究寻找最优解的过程。
3.4. 采用合适的软件工具,在计算机上进行仿真分析和可视化呈现。
3.5. 编写实验报告,总结和分析实验结果,分享并展示项目成果。
最优控制-理论方法与应用课程设计
最优控制-理论方法与应用课程设计1. 概述最优控制是控制科学中的重要领域,它的主要研究目标是在特定控制系统条件下寻求最优的控制策略和状态序列。
最优控制理论涉及的数学和工程学科范畴广泛,如微积分、微分方程、优化理论、控制理论、动力学等。
在科技领域,最优控制已经应用于航空、航天、导航、水利、自动化、电力等许多领域。
2. 学习内容2.1 最优控制的基本概念在本门课中,我们将首先讲述最优控制理论中的基本概念,包括状态空间、状态矢量、控制输入、性能荷重、性能指标等概念。
我们将学习如何根据所给控制系统的数学模型建立最优控制问题的数学表达式。
2.2 最优控制方法在本门课的第二部分中,我们将介绍最优控制理论的主要方法,包括动态规划、线性二次型控制、最小时间控制、最大原则控制等。
我们将学习如何选择最适合控制问题的方法,并根据具体问题进行模型求解。
2.3 最优控制的应用在最后一个部分中,我们将重点介绍最优控制在工程中的应用。
我们将以航空航天和导航为例,学习如何用最优控制解决机动问题,如轨道控制、制导、自动驾驶器的设计等。
3. 课程设计本门课程旨在培养学生的最优控制理论和实践应用能力。
为了达到这一目标,我们设计了以下课程设计项目:3.1 最优控制数学建模在这个项目中,学生将根据所给的控制系统模型,利用所学的最优控制理论,构建最优控制问题的数学模型,并选择适当的最优控制方法求解问题。
3.2 最优控制仿真实验在这个项目中,学生将使用Matlab等数学仿真软件,模拟控制系统的动态过程,并通过设计多种控制策略,比较不同策略的性能指标,最终确定最优控制策略。
3.3 工程最优控制应用设计在这个项目中,学生可以自主选择一个最优控制应用方向,如航空、航天、水利、导航等,根据实际需求,设计最优控制系统,并结合仿真软件进行仿真验证。
4. 总结最优控制理论和应用是现代控制工程中不可或缺的领域,它不仅拓展了学科的范围,也推动了科技的进步和社会的发展。
最优控制理论教学大纲
最优控制理论教学大纲
一、引言
最优控制理论是控制工程领域中的重要分支,旨在寻找使系统性能
达到最优的控制策略。
本教学大纲旨在为学生提供最优控制理论的基
础知识和应用技能,使他们能够在实际工程中灵活应用最优控制理论,提高工程系统的性能。
二、最优控制理论概述
1. 最优控制概念
2. 最优控制问题分类
3. 最优控制理论的历史发展
三、最优控制理论基础知识
1. 动态规划理论
2. 变分法
3. 极大值原理
4. 动态系统建模
四、最优控制理论应用
1. 线性二次型最优控制问题
2. Pontryagin最小原理
3. 最优控制在机器人控制中的应用
4. 预测控制
五、最优控制理论实践案例
1. 飞行器自动驾驶控制
2. 汽车智能驾驶系统
3. 工业生产过程中的最优控制应用
六、教学方法
1. 理论讲解结合实例分析
2. 班级讨论和小组作业
3. 实验室实践操作和仿真演示
七、评估方式
1. 期中考试
2. 课堂作业
3. 期末大作业
八、参考教材
1. "Optimal Control Theory: An Introduction" by Donald E. Kirk
2. "Optimal Control Applications in Electric Power Systems" by Louie Wei
通过本教学大纲的学习,学生将全面掌握最优控制理论的基础知识和应用技能,为将来从事控制工程领域的工作打下坚实基础。
愿学生们在学习过程中努力钻研,不断提升自我,在最优控制理论领域取得优异成绩!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最优控制理论教学设计
前言
最优控制理论是一种在控制领域中广泛使用的数学工具。
它可以帮助我们设计控制算法,从而在某些方面优化控制系统的性能。
在本文中,我们将讨论如何在教学中有效地介绍最优控制理论。
教学目标
在最优控制理论的教学中,我们的主要目标是让学生掌握以下知识:
•最优控制问题的基本概念和理论框架;
•经典最优控制方法的基本原理和应用;
•蒙特卡罗方法、动态规划等最优控制现代算法的基本原理和应用;
•最优控制问题的应用举例,如空间探测器姿态控制等。
教学内容
理论部分
1. 最优控制问题的基本概念
最优控制问题可以定义为对一个动态系统的控制输入进行选择,以最小化某个性能指标。
在教学中,我们要介绍最优控制问题的基本概念,包括状态、控制和性能指标。
同时,我们还要介绍动态系统的数学描述,如微分方程等。
2. 经典最优控制方法
我们要介绍一些经典的最优控制方法,如极大值原理、线性二次型调节器等。
同时,还需要着重讲解它们的基本原理和应用。
3. 最优控制现代算法
在介绍完经典的最优控制方法后,我们要介绍一些最优控制现代算法,如蒙特卡罗方法、动态规划等。
在讲解这些算法时,我们需要着重强调它们的基本原理和应用。
实践部分
在最优控制理论教学中,实践部分是非常重要的。
我们需要设计实验来帮助学生巩固所学知识,并且让学生更好地理解最优控制理论的应用。
1. 设计仿真实验
我们可以通过使用仿真软件,如MATLAB,来设计仿真实验。
在实验中,我们可以让学生通过变化动态系统的控制输入,比较不同控制方案的性能指标,从而实际体验最优控制方法的应用。
2. 实验室实践
在教学中,我们还可以设计实验来让学生亲自编写最优控制算法和测试控制系统的性能。
通过实验室实践,学生可以更好地理解最优控制方法的应用。
课程评估
我们需要在课程结束时,进行评估来确定课程达到的目标是否得到了达成。
我们可以进行问卷调查来获得学生的反馈,并且对学生的掌握情况进行测验来检验学生对最优控制理论的掌握情况。
结语
最优控制理论的教学需要我们注重理论与实践的结合,让学生在通过理论学习掌握方法的基础上,通过实践锻炼掌握方法的应用。
希望这篇文章可以对最优控制理论的教学设计提供一些帮助。