基于可调度性与全局延迟的分布式嵌入系统实时通信中的总线访问优化
拜占庭容错纠删码分布式存储协议

l 纠删码
一
个 (。 纠删码把 m个源数据编码为 n(> ) nm) I k l
个数据 ,使得用这 n个数据 中任意大于等于 m个编码 数据均可重构原来 m 个源数据 ( 如图 l 所示 ) 。通常 情况下一个 ( .)线性纠删码是可以是表示为 y x , n k = G
收稿时I 2 1.60 ;  ̄: 1 .9收到修改稿时1: 1—71 0 0  ̄ 2 10.8 0
f1 + 个分片就是 3+ 个分片 中的前 f 1 f1 + 个分片( f 1, m= + )
恢复 出数据块 B’然后用纠删码将 B’ , 编码生成 n个分
片 ,再分别哈希每一个分片,与交叉检验码 中的对应 部分相 比较 ,如果全部都一致 ,那么数据验证成功 , 即重构的源 数据 是正确的 , 与编码前的数据 是相等 的, 代码如下 ,验证过程如 图 3所示 。
C Lu n Ja a .i
(co l f lc o i adIfr ainE gn eig T n jU iesy S ag a 10 , hn) S h o et n n om t n ier , o gi nvri , h n hi 0 8 C ia oE r c n o n t 2 4
Ke r s we n o mai ne ta to b z ni ef utt lr n ; r s r o e r p iai n; o mo p i n e p i t ywo d : bi f r to xr ci n; y a t a l-o e a t e a u ec d ; e l t n c o h mo r hcf g r rn s i
片来 自于唯一的数据块 。 K a cy rw zk提 出了分布 式指纹的概念 , 以用于对 可 数 据 分 片 的验 证 。 实 质上 是一 种 称 为交 叉 校 验 和
基于CAN总线实时应用的可靠调度性研究

Ab ta t AN sa d a c d sra c mmu iainpooo n d pst id fdsr ue o t lsse .I a sr c:C i n a v n e e l o i nc t rtc la da a t okn so it b td c nr ytms nr l o i 串行 通信 协议 , 用于各 种 分布 式 控 制 系统 。在 实时应 用 中, CN 适 标
准的 C N协议使 用静态优先级算法, A 对传输信道 的利用率比较低。对基 于 C N总线通信的动 态优 A 先级调度算法进行研 究后 , 出了一种基于指数分配方式的 M S算法, 提 T 在保证 强实时性消息的同时 兼顾 了低优 先级 消息 的公 平性 。 关键词 : 标识符 ; 单调时间限算法; 单调速率算法 ; 混合通行算法; 最早时间限优先算法
理和可调度性的判断 。一 旦为 消息 分配 了优先级 , 直到消息 结束 优先级也不会变化 。可是 如同单 机上 一样 , 态优先级 静
控制系统中多个控制回路 , 同时又可集中获取数据、 集中管理
和集中控制的 自动控制 系统 。各 回路 之间和上下级之间通过
高速数据通道交换信息。分布式控制系统具有数据获取、 直 接数字控制、 人机交互以及监控和管理等功能, 使用广泛的汽
dn mcp o t agrh 1C N b s xdtfcsh dlr M S ae nepnni s n n a rpsd t ya i r ryl o tm O A —u ,ami a ceue ( T )bsdo x oe t a i met spooe.I i i i 1 " e rf i l as g w
电力系统智能分布式优化

电力系统智能分布式优化随着电力系统的不断发展和电能需求的增加,传统的电力系统已经无法满足高效、安全、可靠的要求。
因此,智能分布式优化成为了电力系统的重要研究方向。
本文将介绍电力系统智能分布式优化的背景、技术原理以及应用前景。
一、背景电力系统的智能分布式优化是基于现代计算机技术、通信技术和控制技术的发展而提出的。
传统的电力系统主要是集中式控制方式,即一个中心控制系统对整个电力系统进行统一调度和控制。
然而,这种集中式控制存在单点故障的问题,无法满足电力系统的高可靠性要求。
同时,随着电力系统的规模不断扩大,集中式控制面临着运算能力和通信资源的限制。
因此,引入智能分布式优化成为了解决这些问题的一种有效途径。
二、技术原理电力系统智能分布式优化主要借鉴了协同优化、分布式控制和智能算法等技术原理。
首先,通过协同优化的思想,将整个电力系统划分为若干个分布式控制单元(DCU),每个DCU可以独立地进行优化问题的求解。
同时,这些分布式控制单元之间可以通过通信网络共享信息,实现协同控制。
其次,利用智能算法如人工智能、遗传算法等,对每个DCU进行优化求解。
智能算法具有全局寻优能力和自适应性,可以有效解决电力系统的优化问题。
最后,将分布式控制单元的优化结果汇总,通过集中式控制系统进行协调和调度,实现电力系统的智能分布式优化。
三、应用前景电力系统智能分布式优化在电力系统的各个环节都有广泛的应用前景。
首先,在电力生产环节,通过智能分布式优化可以实现电源调度的智能化,优化电网的供需平衡,提高电网的供电可靠性;其次,在电力传输环节,智能分布式优化可以优化输电线路的配置和容量,降低电力传输损耗;再次,在电力配电环节,智能分布式优化可以实现电力负荷的均衡分配,减少电力损耗和线路的负荷过载;最后,在电力消费环节,智能分布式优化可以提供智能用电的服务,实现对用户用电行为的优化和控制。
此外,电力系统智能分布式优化还可以与新能源、储能技术等相结合,实现电力系统的智能化、可持续发展。
DDS应用
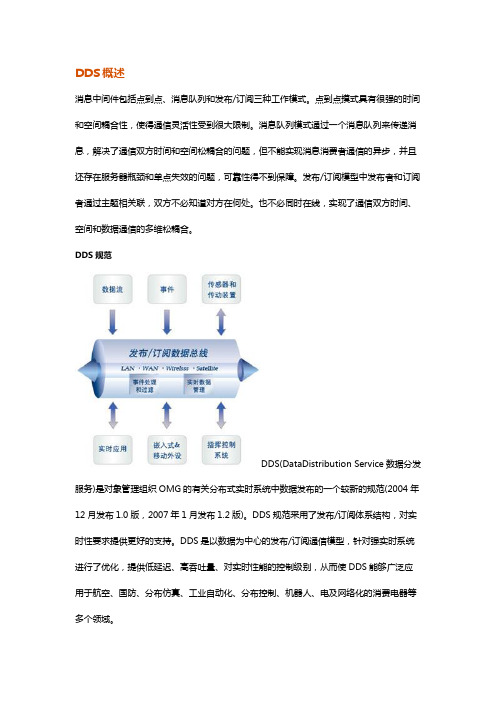
DDS概述消息中间件包括点到点、消息队列和发布/订阅三种工作模式。
点到点摸式具有很强的时间和空间耦合性,使得通信灵活性受到很大限制。
消息队列模式通过一个消息队列来传递消息,解决了通信双方时间和空间松耦合的问题,但不能实现消息消费者通信的异步,并且还存在服务器瓶颈和单点失效的问题,可靠性得不到保障。
发布/订阅模型中发布者和订阅者通过主题相关联,双方不必知道对方在何处。
也不必同时在线,实现了通信双方时间、空间和数据通信的多维松耦合。
DDS规范DDS(DataDistribution Service数据分发服务)是对象管理组织OMG的有关分布式实时系统中数据发布的一个较新的规范(2004年12月发布1.0版,2007年1月发布1.2版)。
DDS规范采用了发布/订阅体系结构,对实时性要求提供更好的支持。
DDS是以数据为中心的发布/订阅通信模型,针对强实时系统进行了优化,提供低延迟、高吞吐量、对实时性能的控制级别,从而使DDS能够广泛应用于航空、国防、分布仿真、工业自动化、分布控制、机器人、电及网络化的消费电器等多个领域。
DDS标准规范了实时分布式系统中数据发布、传递和接收的接口和行为,定义了以数据为中心的发布/订阅机制。
DDS规范使用UML语言描述服务,提供了一个与平台无关的数据模型(这个模型能够映射到各种具体的平台和编程语言),使得实时分布式系统中数据能够高效、可靠地发布,它主要应用在要求高性能、可预见性和对资源有效使用的关键任务领域。
DDS规范列举并正式定义了一整套全面的QoS策略,能利用QoS进行系统控制。
每一个DCPS实体都有自身的QoS策略,而且在每一对发布者和订阅者之间又都可以建立独立的QoS协定。
这使得DDS可以很好地配置和利用系统资源,协调可预言性与执行效率间的平衡,并能支持复杂多变的数据流需求。
DDS的通信模型应用程序在处理以数据为中心的分布式系统时,DDS标准中间件可以帮助用户使用更加简单的编程模型,不需要开发特定的事件/消息机制或手动创建封装的CORBA对象来获取远程数据。
解决以太网协议实时性的几种方案
解决以太网协议实时性的几种方案摘要以太网技术以其低成本、高速、高稳定性和高可靠性的优点,正逐渐向工业现场控制领域发展,但是由于以太网技术在工业现场通信方面不能满足实时性的要求,因此就诞生了许多实时以太网技术的解决方案。
本文主要介绍现今比较流行的几种实时以太网协议,以及它们如何在工业以太网的基础上对协议进行改进,以满足工业现场对实时通信的要求。
1 概述在工业控制系统中,现场总线技术的发展使智能现场设备和自动化系统以全数字式、双向传输、多分支结果的通信控制网络相连,使工业控制系统向分散化、网络化和智能化发展。
但是由于各类现场总线标准之间的不可兼容性无法实现统一,阻碍了现场总线技术的发展。
另一方面,以太网技术作为垄断办公自动化领域的通信技术,以其通用性、低成本、高效率、高可靠性和高稳定性等诸多优势,得到了工控界越来越多的关注和认可。
用以太网技术来实现从管理层到工业现场层的一致性通信,人们习惯上将应用到工业领域的以太网技术称为“工业以太网”。
工业数据通信网络与信息网络不同,工业数据通信不仅要解决信号的互通和设备的互连,而且需要解决信息的互通问题,即信息的互相识别、互相理解和互可操作。
所谓信号的互通,即两个需要互相通信的设备所采用的通信介质、信号类型、信号大小、信号的输入/输出匹配等参数,以及数据链路层协议符合同一标准,不同的设备能连接在同一网络上实现互连。
如果仅仅实现设备互连,但没有统一的高层协议(如应用层协议),那么不同设备之间还是不能相互理解、识别彼此所传送的信息含义,就不能实现信息互通,也就不可能实现开放系统之间的互可操作。
互可操作性是指连接到同一网络上、不同厂家的设备之间,通过统一应用层协议进行通信与互用,性能类似的设备可以实现互换。
这是工业数据通信网络区别于一般IT网络的重要特点。
对工业控制来说,还有一个很重要的区别就是实时性。
实时性的一个重要标志就是时间的确定性,通信时数据传输时间不是随机的,而是可事先确定的。
CAN总线固定优先级调度算法的应用

—94—CAN 总线固定优先级调度算法的应用田 静1,2,黄亚楼1,王立文2,李国洪3(1. 南开大学信息学院,天津 300072;2. 中国民航学院地面设备研究基地,天津 300300;3. 天津大学,天津 300072)摘 要:分析了CAN 总线的最差消息传输模型,提出了一种固定优先级调度算法;针对系统控制实时性的要求及特点,对6自由度平台系统的消息进行调度。
实际使用证明,该方法改善了6自由度平台的整体控制性能,提高了网络利用率,消息的截止期得到满足。
关键词:CAN 总线;固定优先级调度算法;6自由度平台Application of Fixed Priority Schedule Algorithm in CAN BusTIAN Jing 1,2, HUANG Yalou 1, WANG Liwen 2, LI Guohong 3(1. Information College, Nankai University, Tianjin 300072; 2. Ground Equipment Research Base, Civil Aviation University of China,Tianjin 300300; 3. Tianjin University, Tianjin 300072)【Abstract 】Message model in the worst-case for CAN bus is analyzed and a schedule algorithm based on fixed priority is proposed. According to the requirement and characteristic of the real control system, messages which are transferred in the six degree of freedom system are scheduled with the fixed priority algorithm. Through experiments, it is proved that the algorithm improves the performance of the six degree of freedom system and the networks utilization. It is also proved that the messages deadline is satisfied.【Key words 】CAN bus; Fixed priority schedule algorithm(FPA); Six degree of freedom platform计 算 机 工 程Computer Engineering 第32卷 第23期Vol.32 No.23 2006年12月December 2006·网络与通信·文章编号:1000—3428(2006)23—0094—03文献标识码:A中图分类号:TP273CAN 是国际上应用最广泛的现场总线之一。
《操作系统》重难点精讲
难点精讲之进程通信
高级通信机制可归结为三大类: 共享存储器系统、消息传递系统以及管道通信系统。 • 共享存储器系统 ① 基于共享数据结构的通信方式 公用数据结构的设臵及对进程间同步的处理,都是程序员的职 责。这种通信方式是低效的,只适于传递相对少量的数据。
② 基于共享存储区的通信方式 为了传输大量数据,在存储器中划出了一块共享存储区,诸进 程可通过对共享存储区中数据的读或写来实现通信。
② 在消息传递系统中,进程间的数据交换,是以格式化的消息为
单位的。 ③ 消息传递系统的通信方式属于高级通信方式。
a) 直接通信方式 b) 间接通信方式
难点精讲之进程
进程是支持程序执行的机制。进程可以理解为程序对数据或请求的处 理过程。具体来说,进程由一些方面组成。 • 至少一个可执行程序,包括代码和初始数据,一般在进程创建时说明。 注意可执行程序可以被多进程共享,换句话说多个进程可能允许同一个 可执行程序。 • 一个独立的进程空间,在进程创建时由操作系统分配。
• 将被终止进程所拥有的全部资源,或者归还给其父进程,或者归还给 系统。 • 将被终止进程(它的PCB)从所在队列(或链表)中移出,等待其他程序 来搜集信息。
难点精讲之进程阻塞过程
• 正在执行的进程,当发现上述某事件时,由于无法继续执行, 于是进程便通过调用阻塞原语block把自己阻塞。可见,进程的阻 塞是进程自身的一种主动行为。
• OS是根据PCB来对并发执行的进程进行控制和管理的。
难点精讲之进程创建过程
• 接收新建进程运行初始值、初始优先级、初始执行程序描述等由父进
程传来的参数。
• 请求分配进程描述块PCB空间,得到一个内部数组进程标识。用从父
进程传来的参数初始化PCB表。 • 产生描述进程空间的数据结构,如页表,用初始参数指定的执行文件 初始化进程空间,如建立城乡区、数据区、栈区等。 • 用进程运行初始值初始化处理机现场保护区。建立一个现场栈帧,等 该进程第一次被调度后会从该栈帧恢复现场,从而能够进入用户程序的 入口点运行。 • 臵好父进程等关系域。 • 将进程臵成就绪状态。将PCB挂入就绪队列,等待被调度运行。
新能源并网通信综合解决方案

新能源并网通信综合解决方案摘要:随着新能源的快速发展,新能源发电设备逐渐成为电力系统的重要组成部分。
与传统的发电设备相比,新能源发电设备的特点包括不可调度、波动性强等,本文针对新能源并网通信问题展开研究,提出了一种综合解决方案。
关键词:新能源;并网通信;解决方案随着气候变化和能源安全的日益关注,新能源的利用越来越受到人们的重视。
新能源发电设备的快速发展和普及使得其成为电力系统的重要组成部分。
然而,与传统的发电设备相比,新能源发电设备具有一些特点,如不可调度性、波动性强等,给并网通信带来了一些独特的挑战。
为了解决这些挑战,需要研究设计一种综合解决方案,以实现新能源和传统电力系统的无缝衔接。
本文旨在对新能源并网通信问题展开研究,并提出相应的解决方案。
一、新能源并网通信的重要性(一)实现能源的优化配置和调度通过并网通信,不同的能源系统可以实现互联互通,达到资源的共享和因地制宜的配置效果。
例如,太阳能和风能等可再生能源可以补充传统能源,实现对电力系统的补贴,以保持电网的稳定运行。
同时,通过全面掌握能源生产和消费的信息,能够根据能源供需情况进行精确调度,确保能源的高效利用。
(二)提高能源系统的安全性和稳定性能源的并网通信可以实现对能源系统运行情况的实时监控和管理。
通过对能源系统的运行数据进行分析和处理,可以及时发现和解决潜在的问题,确保能源系统的稳定运行。
同时,能够准确预测能源需求和供给,避免因能源供需失衡而引发的能源危机。
(三)促进能源的可持续发展新能源的并网通信可以促进能源的多样化和可再生性。
通过并网通信,将不同类型的新能源互联起来,可以实现能源的有效利用和再生利用。
同时,通过并网通信,可以推动新能源技术的研发和应用,促进能源生产的绿色和可持续发展。
(四)促进能源和信息技术的融合随着信息技术的不断发展,能源系统的管理和运营方式也在不断变革。
通过并网通信,可以实现能源系统和信息技术的深度融合,提高能源系统的智能化水平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于可调度性与全局延迟的分布式嵌入系统实时通信中的总线访问优化本文在对TTP通信协议进行研究的基础上,发现嵌入式实时系统通信过程中的消息调度算法只考虑消息的可调度性而没有对全局延迟进行考虑的问题,从而提出基于可调度性及全局延迟的实时通信的总线访问优化的研究课题,随后对实时通信总线的访问优化算法进行了研究,其中包括:静态单消息算法、静态多消息算法、动态消息分配算法以及动态数据包分配,并对可调度性的判断依据进行了说明,最后通过研究现有可调度性最优算法,从而给出改进后的算法描述并加以实现。
第一章绪论1.1课题背景随着网络技术以及和数字信息技术的高速发展,在信息家电、医疗仪器、智能汽车、工业控制、通信设备各个领域中,嵌入式系统无处不在。
随着网络技术的飞速发展,在许多嵌入式应用中,往往包含许多设备,譬如只能中央空调,这时分布式系统就是实现这种系统最方便、最现实的方法[1]。
由于分布式系统具有如下特点:时间关键的任务放在不同的CPU中可以更容易保证满足它的死线要求;把处理器放在设备级上更便于实现设备之间的接口;如果系统中包含从供应商购买的几个设备或系统,它们之间也含有自己的CPU,或者还包含有通信接口,通常不可能把系统的任务放到这些设备中,或者相反把设备的任务放到系统中;使用几个小CPU比使用一个大CPU更便宜;分布式的系统能够利用本身的高度容错性使得在高性能领域分布式系统系统中具有得天独厚的优势。
所以,许多嵌入式系统利用分布式系统实现,在分布的处理器之间利用通讯链路连接起来,数据链路可以是高速并行数据总线(紧耦合型),也可以是串行数据链路。
但是,随着电控单元的增多、功能日益复杂、网络通信数据量不断增大、要1求更高的传输带宽、通信数据传输的高实时性和高可靠性等问题的出现,就需要一种更新、更可靠和更实时的高速通信网络技术来满足上述技术要求。
目前,符合高带宽,实时性特点的总线类型有很多,其中TTP(Time-Trigger Protocol)总线技术是极具发展潜力的总线之一。
TTP是分布式嵌入系统的一种总线访问协议,一般使用于对安全性有高要求的分布式嵌入系统中。
而对于运行在分布式嵌入系统中的实时任务是否能够在满足时限的前提下完成,这取决于分布式节点间的消息通信情况。
在已有文献中,可调度性是衡量实时系统的可预测性指标之一,其值越大则说明该系统的实时任务越不易错失其时限,则其安全性能够得到更好的保障。
而运行在分布式嵌入系统上的周期任务集(链)中第一个任务开始到最后一个任务结束的时间间隔称为该任务集(链)的全局延迟,该值越小那么说明系统到下一次周期任务集(链)开始执行时刻的时间间隔越大,而该时间间隔可以用于进行其他操作,如:非周期任务的处理;让系统处于待机状态,达到节能的目的。
而在以往的实时通信中的总线访问优化,往往只注重系统中的可调度性或全局延迟的优化,而忽略该优化过程中对另一个指标的影响。
如在文献[1]中基于TTP协议的总线访问优化算法就存在这样的问题。
其分布式嵌入系统架构如图1所示[2]:图1.分布式嵌入系统的节点间通信共享同一总线示意该系统中,所有分布节点间的通信采用TDMA (Time-Devision-Multiple-access)方式进行消息传递。
处于N0节点上的实时任务若需要与N1节点上的任务进行通信,则需要先将传输的消息放置发送队列中,当总线的使用时间片轮到N0使用时,N0再依次从消息发送队列中取出消息放置到总线上进行传输。
最后,位于总线上的消息被N1节点获取,放置到自己的接受消息缓冲区中进行消息重组,最后在提供给需要使用该消息的任务使用。
为了满足实时任务的时限要求,消息传输的调度起到了至关重要的作用。
消息传输的调度一方面影响了该系统中实时任务集合的可调度性(该定义详见[1]),同时也影响到了整个实时任务集合在最坏情况下的全局延迟(WCGD)(该定义详见[5]),因此,如何在消息调度过程中,实现任务集合具有最大可调度性的同时,而且还能得到最优或者近优的全局延时(WCGD),这是本课题研究的主要内容。
1.2国内外研究现状计算机控制的发展f6_iol至今主要经历了以下几个阶段:传统的集中式控制系统、七十年代中期发展起来的集散控制系统、八十年代末发展起来的现场总线控制系统、九十年代发展起来的基于以太网的控制系统。
网络控制系统中,网络调度就是对网络中信息的调度。
目前网络控制系统中信息调度的研究主要分为调度与控制的分开设计和调度与控制的协同设计[3-5]。
1.2.1调度与控制的分开设计在NCS的研究中,一类研究是针对通信网络,研究提高网络服务质量的信息调度方法;另一类研究是在一定的网络信息调度方法基础上,研究提高NCS性能的控制方法。
因此,信息调度方法对改善NCS性能起着很大的作用。
根据信息对实时性的要求,信息调度分为静态调度(又称离线调度)、动态调度(又称在线调度)和混合调度。
(1)静态优先级调度目前静态调度算法很多,本文着重介绍以下几种典型的算法以及算法的改进。
速率单调静态优先级调度(Rate Monotonic Scheduling Model)算法的调度优先级由任务周期确定,在任务周期等于时限的同步实时任务系统中是最佳静态调3度算法。
但是该算法具有调度判定具有指数时间复杂度、对任务的执行周期限制的过于严格、只能处理具有固定周期的任务等缺点。
鉴于上述缺点Lehoczky等提出了扩大调度可行性条件的RM算法。
Sha等考虑到任务的阻塞,给出了非抢占服务方式下RM算法的可调度条件。
叶明等基于RM算法提出了一种新的实时调度算法(Hard Real-time Communication Scheduler, HRTCS)。
文远保等针对任务的周期和调优先级关系不固定的流媒体提出了改进的RM算法。
截至时间单调调度模型(Deadline Monotonic Scheduling Model)策略的任务优先级由任务时限来决定。
该调度算法要防止任务越过其时限而得不到调度,从而影响系统的实时性。
当任务周期和时限相同或者所有同步周期性任务时,DM算法都是最佳静态调度算法。
由Hong等提出的基于时间窗的静态带宽调度算法避免了数据在网络传输过程中产生干扰和数据冲突。
Hong等还将该调度方法应用于循环服务型NCS和CAN 网下的NCS中。
刘鲁源等鉴于该调度方法只限于调度网络中的周期数据,提出基于同步相和异步相的时间窗调度算法,使非周期数据也可以采用该基于时间窗的静态调度算法[6-8]。
(2)动态优先级调度在动态优先级调度算法中,任务的时间约束关系并没有完全确定,新任务的到达时间是未知的。
下面介绍几种经典的动态优先级调度算法。
Liu和Layland提出的时限最早的任务优先调度(Earliest deadline first scheduling,任务优先级是任务时限与任务执行时刻的差,该算法对同步周期任务组是最佳的动态调度算法。
鉴于EDF是抢占式调度算法,任务间的切换时需要大量开销。
B aker给出了非抢占士服务方式下EDF算法的可调度性条件。
张惠娟等提出了一种基于EDF算法的优先级驱动实时调度算法,较大程度地克服了EDF 算法在多处理器系统中的调度缺点。
刘怀等提出了基于EDF算法的容错调度算法。
张奇智等采用非中断的EDF调度方法来改善周期性数据帧的端到端延迟。
洪艳伟等提出了分别在简单模型上和复杂模型上如何判定实时任务的可行性。
最小松弛优先调度((Least laxity first)和EDF算法可看作同类型的调度算法,任务优先级是完成时限和任务执行时刻的差再减去周期任务的执行时间。
LLF算法尽量避免了长周期任务的频繁等待、执行,具有较小的抖动性。
最大误差优先一尝试一次丢弃(most error first-try once discard)是Walsh等人提出的基于在线获取的网络诱导传输误差和动态分配网络带宽的调度算法。
Otanez等人提出的基于死区的动态调度在确保系统性能的基础上动态地丢弃一定比率的数据,以减轻网络的负荷。
但是当多个获准访问网络的数据包同时竞争网络资源时,该策略不能确定数据包发送的优先级。
基于业务平滑的动态调度是Kewon等利用业务平滑的技术控制Ethernet网的通信量,通过在Ethernet网的UDP( TCP/ IP)层和MAC层插入定速率业务平滑器和自适应业务平滑器以限定MAC层数据包的到达速率,并且保证网络诱导时延的有界性,从而提高网络的服务质量。
Cena等提出的优先级提升一分布式优先级排队调度(PP-DPQ)可以保证实时数据传输最大间隔具有确定上界,非实时数据在传输中公平地竞争网络资源。
基于时间窗的动态调度(Dynamic Time Window)是Raja对基于时间窗的静态调度算法进行改进,提出优先级循环服务和动态时间窗的带宽分配策略[9-10]。
模糊动态调度是白涛等将模糊控制理论引入到NCS信息调度中,利用基于IF2THEN规则的模糊逻辑确定数据传输的优先级。
(3)混合调度Zuberi等针对CAN下网络控制系统,提出混合通信调度(MTS)策略。
在设计调度策略时,考虑到数据实时性要求不同,可以分别采用不同的调度策略,以提高网络资源的可调度性。
Tabuada等给出的退火控制任务的事件触发实时调度是基于有反馈事例的事件触发调度器,并且给出了它如何保证系统性能的条件。
1.2.2调度与控制的协同设计目前关于控制与调度共同设计成为研究热点受到越来越多的重视,大体可分为开环调度和反馈控制实时调度两方面。
(1)开环调度A.对NCS中各个控制环中数据传输节点采样周期和采样时刻的调度Hong基于“窗口”的概念,给出了一种通过调度采样时间来减少时延的影响并提高网络利用率的调度算法,建立了NCS控制系统性能与网络性能间的约束关系。
但该算法是基于令牌环系统(token passing system)和轮询系统(polling system)的一维对象的调度,系统中信息类型仅限于周期性信息。
Kim等基于相同5思想提出了适用于多维对象的采样时间调度算法。
刘鲁源等提出了利用剩余的时间窗口调度非实时数据提高了网络资源利用率的调度算法。
B.调度优化Seto针对性能指标是单调递减并且是每一任务频率的凸函数的这样一类控制系统,提出了一种通过改变采样频率使得任务能被EDF和RM调度的新算法,而且系统的性能在有限计算资源的约束下能达到最优。
但该算法没有考虑执行时间的变化与扰动问题。
Cervin考虑了具有时延变化的控制系统采样周期的选择问题,对低于一个采样周期的时延系统的采样周期进行了分析。
Ryu等以稳定状态误差、过冲、上升时间、沉降速度等作为控制性能参数,并将它们表示为采样周期和输入输出延时的函数,在可调度约束条件下用迭代算法对这些性能参数进行优化。