IFT6 与 611U 电机编码器接口
西门子611模块技术说明
门子611U的驱动模块上的9和663脉冲使能的作用是啥?请详细介绍一下。
悬赏分:5 | 解决时间:2010-08-24 16:21:22 | 提问者:王奇 - 毕业实践员第4级问题ID:56775最佳答案611系列的驱动分成模拟611A,数字611D和通用型611U。
都是模块化结构,主要有以下几个模块组成:•电源模块电源模块是提供驱动和数控系统的电源,包括维持系统正常工作的弱电和供给功率模块用的600V直流电压。
根据直流电压控制方式,它又分为开环控制的UE模块和闭环控制的I/R模块,UE模块没有电源的回馈系统,其直流电压正常时为570V左右,而当制动能量大时,电压可高达640多伏。
I/R模块的电压一直维持在600V左右•控制模块控制模块实现对伺服轴的速度环和电流环的闭环控制•功率模块对伺服电机提供频率和电压可变的交流电源•监控模块主要是对电源模块弱电供电能力的补充。
•滤波模块对电源进行滤波作用。
•电抗对电压起到平稳作用。
2.611电源模块的接口信号611模块的接口信号有以下几组:(1)电源接口U1 V1 W1:主控制回路三相电输入端口X181:工作电源的输入端口,使用时常常与主电源短接,有的系统为了让机床在断电后驱动还能正常工作一段时间,把600V的电压端子与P500 M500端子短接,这样由于600V电压不能马上放电完毕,还能维持驱动控制板的正常工作一段时间。
P600M600是600V直流电压输出端子。
(2)控制接口64:控制使能输入,该信号同时对所有连接的模块有效,该信号取消时,所有的轴的速度给定电压为零,轴以最大的加速度停车。
延迟一定的时间后,取消脉冲使能63:脉冲使能输入,该信号同时对所有连接的模块有效,该信号取消后,所有的轴的电源取消,轴以自由运动的形式停车。
48:主回路继电器,该信号断开时,主控制回路电源主继电器断开。
112:调试或标准方式,该信号一般用在传输线的调试中,一般情况接到系统的24V上。
汇川伺服电机八线编码器九宫格插头定义

汇川伺服电机八线编码器九宫格插头定义汇川伺服电机八线编码器九宫格插头定义定义•汇川伺服电机:指由汇川公司生产的具有伺服控制功能的电机,常用于工业自动化领域。
•八线编码器:是一种采用八根导线连接的编码器,用于测量机械装置的位置或运动信息。
•九宫格插头:是指八线编码器上的连接器,它具有九个插针孔,用于与其他设备连接。
理由•汇川伺服电机八线编码器九宫格插头的定义是为了描述该编码器的连接方式和设备的兼容性,方便用户在使用时对接正确的接口和设备。
通过定义九宫格插头,可以确保编码器能够准确地与其他设备进行信号传递,保证系统的正常运行。
书籍简介《伺服电机应用技术手册》是一本由汇川公司编写的详细介绍伺服电机应用技术的专业手册。
本书涵盖了伺服电机的原理、控制方式、参数配置以及常见问题的解决方法等内容。
在书中,也包含了对汇川伺服电机八线编码器九宫格插头的定义和使用说明,可以帮助读者更好地理解和使用这种编码器。
该书的特点有: - 详细解析了伺服电机的工作原理和控制方法,适合初学者了解基础知识。
- 提供了大量的应用案例和实际工程中的问题解决方案,便于读者在实践中运用。
- 作者在书中运用了大量的图表和实例,使知识更加易懂易学。
- 通过对汇川伺服电机八线编码器九宫格插头的定义,进一步拓展了读者的知识面,帮助其在实际工程中正确配置编码器连接。
该书不仅适用于工程师和技术人员,在工业自动化领域从事设计和维护工作的人员也可以从中获得实际应用的经验和指导。
以上是对汇川伺服电机八线编码器九宫格插头定义的相关内容和书籍简介的列举和阐述。
希望能对你有所帮助。
定义:•汇川伺服电机:指由汇川公司生产的具有伺服控制功能的电机。
伺服电机是一种能够根据输入信号控制旋转角度或位置的电机,常用于需要精确控制运动位置和速度的应用场景。
•八线编码器:八线编码器是一种用于测量机械装置位置或运动信息的设备。
它通过编码器原理将机械运动转化为电信号,进而实现对机械装置的准确定位和控制。
编码器接线原理
编码器接线原理编码器是一种设备,用于将输入信号转换为特定编码形式的输出信号。
在数字系统中,编码器通常用于将模拟信号或数字信号转换为数字形式,以便进一步处理和存储。
编码器的工作原理可以通过以下步骤来解释:1. 输入信号:编码器接受一个或多个输入信号。
这些输入信号可以是模拟信号(例如电压或电流)或数字信号(例如逻辑电平)。
2. 编码方式:编码器使用某种编码方式将输入信号转换为输出信号。
编码方式可以是不同的,并根据需要选择合适的编码方式。
3. 编码器类型:编码器可以分为不同的类型,包括优先级编码器、格雷码编码器和绝对值编码器。
每种类型都有其独特的特点和适用范围。
4. 硬件实现:编码器可以使用逻辑门电路来实现。
逻辑门电路根据输入信号的状态进行计算,并产生相应的输出信号。
5. 输出信号:编码器的输出信号可以是模拟信号或数字信号,具体取决于编码器本身的特性和所需的应用。
编码器的接线原理涉及到与其他设备的连接方式。
一般来说,编码器的接线可以分为两种类型:并行接线和串行接线。
并行接线是指编码器的每个输出线都与一个接收设备的相应输入线相连。
这种接线方式适用于较短的距离,可以保持较高的数据传输速率。
然而,由于需要大量的接线,这种接线方式在连接较多的设备时可能变得复杂和混乱。
串行接线是指编码器的输出信号被串行传输到接收设备。
在这种接线方式下,编码器的输出信号通过一个线路按照一定的顺序传递给接收设备,并在接收设备中进行解码。
串行接线方式适用于较长的距离,可以减少连接线的数量,但传输速度相对较慢。
根据具体需求和应用场景,选择合适的接线方式非常重要。
并行接线方式适用于对传输速度要求较高、距离较短的场景。
串行接线方式则适用于距离较长、对传输速度没有特别要求的场景。
总结起来,编码器是将输入信号转换为特定编码形式的输出信号的设备。
它可以通过逻辑门电路来实现,并能够使用不同的编码方式将输入信号转换为输出信号。
编码器的接线方式可以是并行接线或串行接线,具体的选择取决于所需的传输速度和距离。
电机光电编码器、旋转变压器接线方法
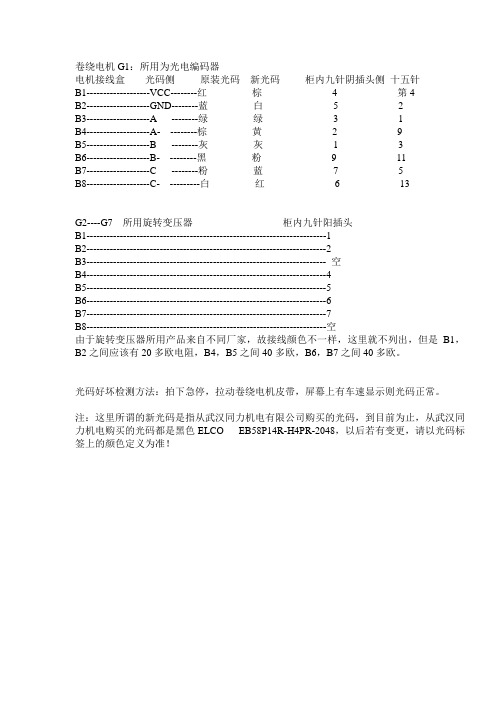
卷绕电机G1:所用为光电编码器电机接线盒光码侧原装光码新光码柜内九针阴插头侧十五针B1-------------------VCC--------红棕 4 第4B2-------------------GND--------蓝白 5 2B3-------------------A --------绿绿 3 1B4-------------------A- --------棕黄 2 9B5-------------------B --------灰灰 1 3B6-------------------B- --------黑粉9 11B7-------------------C --------粉蓝7 5B8-------------------C- ---------白红 6 13G2----G7 所用旋转变压器柜内九针阳插头B1------------------------------------------------------------------------1B2------------------------------------------------------------------------2B3------------------------------------------------------------------------ 空B4------------------------------------------------------------------------4B5------------------------------------------------------------------------5B6------------------------------------------------------------------------6B7------------------------------------------------------------------------7B8------------------------------------------------------------------------空由于旋转变压器所用产品来自不同厂家,故接线颜色不一样,这里就不列出,但是B1,B2之间应该有20多欧电阻,B4,B5之间40多欧,B6,B7之间40多欧。
611u驱动控制
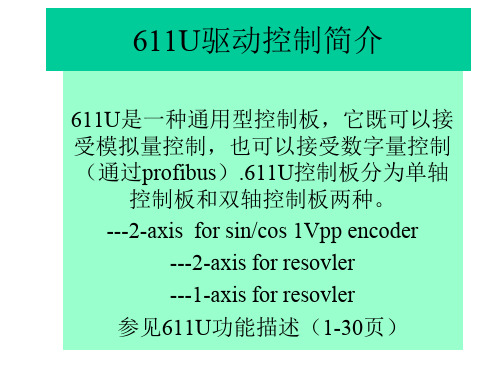
611U控制方式
• Speed/torque mode (速度/力矩方式) 在这种方式下,611U控制板可以用来 进行速度控制和力矩控制。速度控制方式的 611U控制板不具有位控功能
• Position mode (位控方式) 在这种方式下,611U控制板可以最多有 64句位置控制语句。每一句可以自由定义和编 程。其中有位置,速度,加速度 等参数来定义。611U位控板同时具有速度控制 功能。
STW1.8------M100.0 STW1.9------M100.1 STW1.10------M100.2 STW1.11------M100.3 STW1.12------M100.4 STW1.13------M100.5 STW1.14------M100.6 STW1.15------M100.7
十进制
十六进制
256
100
264
108
• SFC14示例: CALL SFC 14 LADDR :=W#16#108 RET_VAL:=MW10 RECORD :=P#M 50.0 BYTE 20
LADDR----数据源的起始地址 RET_VAL---错误代码纪录 RECORD----存放数据的起始地址
611U可以连接的电机
• 1FT6.1FK6.1FK7 伺服电机(最大140NM) • 1PH 电机(1PH6.1PH7.1PH4.1PH2)最
大100KW. • 1FN直线电机。 • 1FE1 永磁同步电机 • 标准1LA感应电机(最大100KW) • 不带编码器的感应电机
611U可以连接的测量系统
• Resovler ,极对数1,2,3,4,5,6 • 增量编码器。Sin/cos 1Vpp 最大脉冲数
65535 • 绝对值编码器
编码器的原理接线图与应用

编码器的原理接线图与应用1. 编码器的原理编码器是一种将输入的信息转换为特定编码形式输出的设备。
在数字电子系统中,编码器被广泛应用于信号处理、通讯系统、自动控制等领域。
它能够将模拟信号或数字信号转换为二进制等特定编码形式,以便于数字电子系统的处理和分析。
编码器的原理是基于信号转换和编码规则来实现的。
具体而言,编码器接收输入信号,通过一系列的电路或算法将其转换为输出编码,以实现信号的传递、处理和解析。
常见的编码器包括二进制编码器、格雷码编码器、双进制编码器等。
2. 编码器的接线图编码器的接线图通常包括输入端、输出端和电源端。
根据不同类型的编码器和具体应用场景的需求,接线图的具体连接方式可能会有所不同。
以下是一个典型的编码器接线图示例:输入端:- 输入信号 A- 输入信号 B输出端:- 输出编码 X- 输出编码 Y- 输出编码 Z电源端:- 正电源 VCC- 负电源 GND3. 编码器的应用编码器在数字电子系统中有着广泛的应用,涵盖了多个领域。
以下是编码器常见的应用场景:3.1 信号处理在信号处理领域,编码器被用于将模拟信号转换为数字信号以便于处理和传输。
通过编码器,模拟信号可以以数字形式表示,便于数字电子系统进行进一步的分析、处理和传递。
3.2 通讯系统编码器在通讯系统中扮演着关键角色。
它可以将信号转换为特定编码形式,以便于在传输过程中提高信号的可靠性和传输效率。
常见的应用包括调制解调器和数据压缩等。
3.3 自动控制在自动控制系统中,编码器常用于将传感器获取的物理量转换为数字信号,以实现自动控制和反馈调节。
通过编码器,可以将物理量转换为数字形式,便于电子设备进行分析和控制。
3.4 其他应用除了上述应用场景外,编码器还广泛应用于音频信号处理、视频编码、数据存储等领域。
在音频信号处理中,编码器可以将声音信号转换为数字形式,以便于音频文件的存储和处理。
在视频编码中,编码器可以将模拟视频信号转换为数字视频信号,以便于视频压缩和传输。
611U使用说明
程序说明:1:本程序只含有1轴,有的611U有2轴。
因此上电及硬件复位的程序需另外编制.2:本程序采用FC100-DB100编制,使用时可以改变名称。
改变后要将FC100中的DB100全部改为DB块号3:本程序占用了一个时间继电器T213。
当要改变时在FC100中直接修改就可以了4:本程序只对绝对编码器。
无寻找参考点的程序5:611u的硬件组态如图所示。
也可参考使用提供的组态。
226-b.par.SimoCom U Version 08.02.08。
611U的硬件版本要求7.2以上。
6:使用本程序时,只需对DB100中的IN、OUT部分操作既可。
输入IN(操作命令):86.0 Allow BOOL FALSE 运行条件86.1 EMS BOOL FALSE 紧急停止86.2 Reset BOOL FALSE 故障复位86.3 start BOOL FALSE 开始定位运行86.4 jog1 BOOL FALSE jog+86.5 jog2 BOOL FALSE jog-88.0 AdPKW INT 0 PKW始地址90.0 AdPKD INT 0 PKD始地址92.0 Acc INT 50 加速度94.0 Dcc INT 50 减速度96.0 Pos DINT L#0 目标位置100.0 Vel DINT L#500000 目标速度104.0 Over WORD W#16#100 倍率输出OUT(611U的状态):106.0 Ready BOOL FALSE 准备就绪106.1 Alarm BOOL FALSE 有报警106.2 Fault BOOL FALSE 有故障106.3 END BOOL FALSE 定位完成(pules)108 POS DINT L#0 当前位置611U的硬件组态:以上画面为硬件配置画面,修改完成后下载到硬件。
在PROFIBUS Parmeterization做如下组态。
最新SimoDrive611Ue伺服模块驱动的使用
X333
611Ue的报警
SimoCom U伺服调试工具
X111
X222
注意:
扁平电缆和端子 转换器均非西门 子配套部件
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49
系统的连接 – 驱动器连接(电源馈入模块)
Over Temp Exchange
Power
Ready
PP72/48
T64
T63
T48
tt
上电时 序
380 VAC
0 V 24 VDC
连接到PLC输入端 连接到PLC输出端
0V
74
73.2 73.1 72 53 52 51 63 9 9 64 19 9 112 48 NS1 NS2
9 19
75 A 16 A 75B 16B 15
56. A 14. A 24. A 20. A 65. A
9. A I 0. A I 1. A Q 0.A Q 1.A
24 VDC 0V ±10V
模拟信号参考地
CW CCW
611UE 0V
802D与611UE的调试方法请参阅 《802D简明调试手册》中的应用实 例“带直接测量系统的模拟主轴”
I 0.A是用于测量的高速 输入接口 如果测量装置使用外部 24V电源,该24V电源 的0V应与M24连接
Q0.A和Q1.A用于模拟 主轴的使能控制
P24
X411 X412
M24
663
编码器的安装使用与接线方法
编码器的安装使用与接线方法绝对型旋转编码器的机械安装使用:绝对型旋转编码器的机械安装有高速端安装、低速端安装、辅助机械装置安装等多种形式。
高速端安装:安装于动力马达转轴端(或齿轮连接),此方法优点是分辨率高,由于多圈编码器有4096圈,马达转动圈数在此量程范围内,可充分用足量程而提高分辨率,缺点是运动物体通过减速齿轮后,来回程有齿轮间隙误差,一般用于单向高精度控制定位,例如轧钢的辊缝控制。
另外编码器直接安装于高速端,马达抖动须较小,不然易损坏编码器。
低速端安装:安装于减速齿轮后,如卷扬钢丝绳卷筒的轴端或最后一节减速齿轮轴端,此方法已无齿轮来回程间隙,测量较直接,精度较高,此方法一般测量长距离定位,例如各种提升设备,送料小车定位等。
辅助机械安装:常用的有齿轮齿条、链条皮带、摩擦转轮、收绳机械等。
旋转编码器是一种光电式旋转测量装置,它将被测的角位移直接转换成数字信号(高速脉冲信号)。
编码器如以信号原理来分,有增量型编码器,绝对型编码器。
我们通常用的是增量型编码器,可将旋转编码器的输出脉冲信号直接输入给PLC,利用PLC的高速计数器对其脉冲信号进行计数,以获得测量结果。
不同型号的旋转编码器,其输出脉冲的相数也不同,有的旋转编码器输出A、B、Z三相脉冲,有的只有A、B相两相,最简单的只有A相。
编码器有5条引线,其中3条是脉冲输出线,1条是COM端线,1条是电源线(OC门输出型)。
编码器的电源可以是外接电源,也可直接使用PLC的DC24V电源。
电源“-”端要与编码器的COM 端连接,“+ ”与编码器的电源端连接。
编码器的COM端与PLC输入COM端连接,A、B、Z两相脉冲输出线直接与PLC的输入端连接,A、B为相差90度的脉冲,Z相信号在编码器旋转一圈只有一个脉冲,通常用来做零点的依据,连接时要注意PLC输入的响应时间。
旋转编码器还有一条屏蔽线,使用时要将屏蔽线接地,提高抗干扰性。
编码器-----------PLCA-----------------X0B-----------------X1Z------------------X2+24V------------+24VCOM------------- -24V-----------COM[1]。
611u内容介绍以及程序分析
STW1.2- ON/OFF3:是急速停车,正常为1,为0时以最大 制动力停车不经过斜坡函数发生器。
STW1.3:是斜坡函数发生器使能,为0时惯性停车。
74
SatzAnw控制字
75
PosStw控制字
76
STW2控制字
77Over控制字源自P0883=16384.0;78
79
“SIMODRIVE 611 universal” 驱动设 备在”speed/ torque setpoint” 控制方式下,通 过PROFIBUS– DP设置1500 RPM 的转速值。
异步电机也可以在没有编码器的情况下 进行操作控制
所用编码器包括: -旋转编码器, -峰-峰值为1Vpp的正弦/余弦信号编码器 , -使用 EnDat 接口的绝对编码器
14
”SIMODRIVE 611 universal”可以挂接的 电机:
• 1FK6, 1FT6 伺服电机,最大140 Nm • 1FE1 永磁同步电机 • 1PH 感应电机,最大100 kW (1PH6, 1PH4, 1PH2, 1PH7) • 不带编码器的感应电机 • 标准 1LA 感应电机,最大 100 kW • 1FN 直线电机 • 1FW6 电机
• 所有数据均安全地保存在一个数据包中。SIMODRIVE 611 universal可以将其所有驱动数据(例如系统软件和用 户数据)安全地保存在一个可更换存储模块中。根据需 要,无需任何辅助操作即可更换存储模块。
13
同步电机: 异步电机: 非西门子电机:
- 1FK7, 1FK6, 1FT6, 1FE., 1FN.. - 1PH..,1LA... - xxy
PG 25针到9针的 串口连接方式。