霍尔传感器、磁性传感器原理图PCB图及例程
霍尔式传感器原理及应用(共9张PPT)

霍尔电势 VH 的大小 48)
式中 KH——霍尔常数,表示单位磁感应强度和
单位控制电流下所得的开路霍尔电势, 取决于材质、元件尺寸,并受温度变化影响;
α——电流方向与磁场方向夹角,如两者垂直,则sinα=1。
磁场变化 材料的厚度 d 愈小,则 KH 就愈大、灵敏度愈高
霍尔芯片一般用非磁性金属、陶瓷或环氧树脂封装 若在一个方向上通以电流 I 磁场变化
洛伦兹力•F应L 的用方中向由不左用手定永则久决定磁铁产生的磁场,而是用一个可变电流作激磁的可变磁场,输
R为调节电阻,调节控制电流的大小 建立霍尔电势所需的时间极短(10-12~10-14)
使用时,I 和 B 都可作为输入信号,输出信号正比于两者的乘积
一式般中采K用H—N形—锗霍、尔锑常化寿数铟,命、表砷长示化单铟位、磁砷感化应镓强和度磷和砷化铟等
材料的厚度 d 愈小,则 KH 就愈大、灵敏度愈高
价格低
•可以广泛应用于测量:
位移
可转化为位移的力和加速度
在垂直于 B 和 I 的方向上产生一感应电动势 VH
洛伦兹力 FL 的方向由左手定则决定 当霍尔元件相对于磁极作x方向位移时,可得到输出电压VH=VH1-VH2,且ΔVH数值正比于位移量Δx,正负方向取决于位移Δx的方向 若在一个方向上通以电流 I 霍尔元件置于两相反方向的磁场中
霍尔元件霍可制尔成位传移传感感器器 的结构
R为调节电阻,调节控制电流的大小 建立霍尔电势所需的时间极短(10-12~10-14) 在垂直于 B 和 I 的方向上产生一感应电动势 VH
• 霍尔元件传感器既能测量位移的大小,又能鉴别位移的方向
•霍尔元件在静止状态下具有感受磁场的独特能力
3.9 霍尔传感器
返回
上页
下页
3.9 霍尔传感器
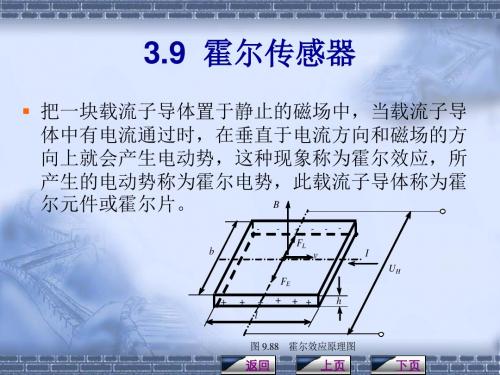
一块长为 l,宽为 b,厚度为h的N型半导体,在半导 体长度方向通以电流I,将其置于的磁感应强度为B 的磁场中(磁场强度方向垂直于半导体平面),则 半导体中的载流子电子将会受到洛仑兹力的作用, 根据物理学知识 FL q0 vB (9.80) 式中 q 0—电子的电荷量,; v —半导体中电子的运动速度; B —磁场的磁感应强度。
H
返回
上页
下页
国产霍尔元件型号的命名方法:
国产霍尔元件型号的命 名方法
Z — —锗 T — — 锑 化 铟 S — — 砷 化 铟
常见的国产霍尔元件型号有HZ-1、 HZ-2、 HZ-3、 HT-1、HS-1等
3.9 霍尔元件
1)测量电流I 在一定温度下,对于一确定的霍尔元件,当 磁感应强度B保持恒定时,电流I的变化可引 起霍尔电势相应的线性变化。则可通过测量 霍尔电势来测得电流I或者跟电流I有关的其他 物理量。
3.9 霍尔传感器
把一块载流子导体置于静止的磁场中,当载流子导 体中有电流通过时,在垂直于电流方向和磁场的方 向上就会产生电动势,这种现象称为霍尔效应,所 产生的电动势称为霍尔电势,此载流子导体称为霍 B 尔元件或霍尔片。
b FE + + + l + + + h - - FL v I UH
图 9.88 霍尔效应原理图
R I=IH A E UH B
图 9.97
恒压源温度补偿电路
返回
上页
下页
3.9 测量误差补偿
R1 R2 RT R4 RW1 E1 图 9.98 霍尔元件的实际补偿电路 R3 RW3 E2 RW2 UH
霍尔传感器、磁性传感器原理图PCB图及例程

霍尔传感器使用说明书简要说明:一、长尺寸:32mm X宽11mm X高20mm二、主要芯片:LM393、3144霍尔传感器三、工作电压:直流5伏四、特点:1、具有信号输出指示。
2、单路信号输出。
3、输出有效信号为低电平。
4、灵敏度可调(精调)。
5、有磁场切割就有信号输出6、电路板输出开关量!(可直接接单片机)7、可用于电机测速/位置检测等场合适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【图片展示】【与单片机连接测试程序】/********************************************************************汇诚科技实现功能:此版配套测试程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ /******************************************************************** 说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平*********************************************************************/ #include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************I/O定义*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************延时函数*********************************************************************/ void delay()//延时程序{uchar m,n,s;for(m=20;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(DOUT==0)//当浓度高于设定值时,执行条件函数{delay();//延时抗干扰if(DOUT==0)//确定浓度高于设定值时,执行条件函数{LED=0; //点亮P1.0口灯}}}}/********************************************************************结束*********************************************************************/【与单片机连接测速参考程序】/********************************************************************汇诚科技实现功能: 电机转速表设计使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚unsigned char code digit[ ]={"0123456789"}; //定义字符数组显示数字unsigned int v; //储存电机转速unsigned char count; //储存定时器T0中断次数bit flag; //计满1秒钟标志位/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delay(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
第五章第2节霍尔传感器介绍PPT课件

虽然温度升高了ΔT,为使霍尔电势不变,补偿电路必须满 足温升前、 后的霍尔电势不变,即UH0=UH,则
KH0IH0B=KHIHB
(5)
有
KH0IH0=KHIH
(6)
-
27
KH=KH0(1+αΔT)
IH0
Rp0Is Rp0 Ri0
IHR R pp Is R i R p0(1 R p0 (1 T ) R T i0()1 Is T )
Rp0()Ri0
-
31
3.采用温度补偿元件(如热敏电阻、电阻丝)
这是一种常用的温度误差的补偿方法,尤其适用于锑化铟 材料的霍尔元件,图5-11示出了几种不同连接方式的例子。
热敏电阻Rt具有负温度系数,电阻丝具有正温度系数。图 a、b、c中霍尔元件材料为锑化铟,其霍尔输出具有负温度系
数。图d为用Rt补偿霍尔输出具有正温度系数的温度误差。使 用时要求这些热敏元件尽量靠近霍尔元件,使它们具有相同
功率放大器A3为后级,它不仅切断共模干扰的传输,还将双 端输入方式变换成单端输出方式,以满足负载的需要
-
13
霍尔传感器输出电压是交流的情况: C1漏电流小,C2漏电流大- ,其差表现为偏移电压。 14
霍尔传感器、磁传感器原理图PCB图及例程

霍尔传感器、磁传感器原理图PCB图及例程————————————————————————————————作者:————————————————————————————————日期:霍尔传感器使用说明书简要说明:一、长尺寸:32mm X宽11mm X高20mm二、主要芯片:LM393、3144霍尔传感器三、工作电压:直流5伏四、特点:1、具有信号输出指示。
2、单路信号输出。
3、输出有效信号为低电平。
4、灵敏度可调(精调)。
5、有磁场切割就有信号输出6、电路板输出开关量!(可直接接单片机)7、可用于电机测速/位置检测等场合适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【图片展示】【与单片机连接测试程序】/********************************************************************汇诚科技实现功能:此版配套测试程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ /******************************************************************** 说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平*********************************************************************/ #include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************I/O定义*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************延时函数*********************************************************************/ void delay()//延时程序{uchar m,n,s;for(m=20;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(DOUT==0)//当浓度高于设定值时,执行条件函数{delay();//延时抗干扰if(DOUT==0)//确定浓度高于设定值时,执行条件函数{LED=0; //点亮P1.0口灯}}}}/********************************************************************结束*********************************************************************/【与单片机连接测速参考程序】/********************************************************************汇诚科技实现功能: 电机转速表设计使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚unsigned char code digit[ ]={"0123456789"}; //定义字符数组显示数字unsigned int v; //储存电机转速unsigned char count; //储存定时器T0中断次数bit flag; //计满1秒钟标志位/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delay(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
霍尔电流电压传感器原理图及工作原理

磁平衡式霍尔电电压传感器工作原理
原边电压Vp通过原边电阻R1转换为原边电流Ip,Ip产生的磁通量与霍尔电压经放大产生的副边电流Is通过副边线圈所产生的磁通量相平衡。
副边电流Is精确地反映原边电压。
磁平衡式霍尔电流传感器工作原理:
原边电流Ip产生的磁通量与霍尔电压经放大产生的副边电流Is通过副边线圈所产生的磁通量相平衡。
副边电流Is精确地反映原边电流。
:
直检式霍尔电流传感器工作原理
如图。
由于磁路与霍尔器件的输出具有良好的线性关系,因此霍尔器件输出的电压讯号U0可以间接反映出被测电流I1的大小,即:I1∝B1∝U0;把U0定标为当被测电流I1为额定值时,U0等于50mV或100mV。
这就制成霍尔直接检测(无放大)电流传感器。
霍尔传感器的结构、工作原理与应用(ppt 51页)
线性型三端 霍尔集成电路
01.05.2020
9
线性型霍尔特性
右图示出了具 有双端差动输出特 性的线性霍尔器件 的输出特性曲线。 当磁场为零时,它 的输出电压等于零; 当感受的磁场为正 向(磁钢的S极对准 霍尔器件的正面) 时, 01.05.2020 输出为正;磁
请画出线性范围
10
开关型霍尔集成电路
14
开关型霍尔集成电路的史密特输出特性
回差越 大,抗振动 干扰能力就 越强。
当磁铁从远到近地接近霍尔IC,到多少
特斯拉时输出翻转?当磁铁从近到远地远离
霍尔IC,到多少特斯拉时输出再次翻转?回
差为多少特斯拉?相当于多少高斯(Gs)?
01.05.2020
15
第三节 霍尔传感器的应用
霍尔电势是关于I、B、 三个变量的函 数,即 EH=KHIBcos 。
第八章 霍尔传感器
在这一章里,卡卡要给大家介绍霍尔传
感器的原理、特性、霍尔集成电路(霍尔 IC)及其应用。霍尔IC可以用于测量地球 磁场,制成电罗盘;将霍尔IC夹在环形铁 心的缺口中,可以制成大电流变送器。霍 尔传感器还广泛用于高斯计、无刷电动机、 接近开关等。霍尔传感器的最大特点是非 接触测量。
最基本的霍 尔元件是一 种四端元件
以下哪一个激励电流的数值较为妥当?
8μA 0.8mA 8mA 80mA
01.05.2020
8
第二节 霍尔集成电路
霍尔集成电路可分为线性型和开关型两大 类线。性型集成电路是将霍尔元件和恒流源、线性差
动放大器等做在一个芯片上,输出电压为伏级,比直 接使用霍尔元件方便得多。较典型的线性型霍尔器件 如UGN3501等。
铁心
I
线性霍尔IC
《传感器与检测技术》霍尔传感器采集实验

《传感器与检测技术》霍尔传感器采集实验一、实验目的1.了解A3144霍尔元件的工作原理;2.通过STM32采集霍尔元件的输出信号,并通过串口显示在检测范围内是否检测到磁场。
二、实验环境1.硬件:1个霍尔传感器模块、1个ST-Link调试器、2根USB2.0方口线、1根USB3.0数据线、1根RJ11线,1台PC机;2.软件:Windows 7/XP、MDK集成开发环境、串口调试器。
三、实验原理图6-1 霍尔传感器模块1. 霍尔传感器霍尔传感器模块的核心采集部件为A3144霍尔元件,如下图所示。
传感器的内部原理如下图所示。
从标有型号的一面即霍尔面看去,同时使管脚向下,从左到右依次为1脚(VCC)、2脚(GND)、3脚(OUT)。
当霍尔面检测到磁场后,内部三极管导通,输出低电平,平时输出为高电平。
2.电路分析本节实验中,用到了霍尔传感器模块上的Status、RS485-T和User1指示灯,由【配套光盘\01-文档资料\01-原理图\03-传感器模块\13-霍尔传感器】目录中的原理图文件“霍尔传感器.pdf”,可以知道这三个指示灯的控制引脚配置如下表所示。
霍尔元件与STM32的接口电路如下图所示。
当霍尔元件周围无磁场时,输出高电平;当霍尔元件周围有磁场时,输出低电平,并通过PB10输入到STM32中。
3.程序流程四、实验内容1. 将USB3.0数据线的一端连接霍尔传感器模块的USB3.0调试烧写口,另一端连接ST-Link调试器的“Debug”接口。
2. 将第1根15B2.0方口线的一端连接PC机的USB口,另一端连接ST-Link调试器的“UISB-Debug”接口。
3. 将第2根USB2.0方口线的一端连接PC机的USB口,另一端连接ST-Link调试器的“USB-45”接口。
4. 将“RJ11”线的一端连接霍尔传感器的“RJ11”口,另一端连接ST-Link调试器的“RS-485”接口,连接正确后效果如下图所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
霍尔传感器使用说明书简要说明:一、长尺寸:32mm X宽11mm X高20mm二、主要芯片:LM393、3144霍尔传感器三、工作电压:直流5伏四、特点:1、具有信号输出指示。
2、单路信号输出。
3、输出有效信号为低电平。
4、灵敏度可调(精调)。
5、有磁场切割就有信号输出6、电路板输出开关量!(可直接接单片机)7、可用于电机测速/位置检测等场合适用场合:单片机学习、电子竞赛、产品开发、毕业设计。
【图片展示】【与单片机连接测试程序】/********************************************************************汇诚科技实现功能:此版配套测试程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun淘宝店:汇诚科技【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!*********************************************************************/ /******************************************************************** 说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平*********************************************************************/ #include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************I/O定义*********************************************************************/ sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit DOUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器的输入端/********************************************************************延时函数*********************************************************************/ void delay()//延时程序{uchar m,n,s;for(m=20;m>0;m--)for(n=20;n>0;n--)for(s=248;s>0;s--);}/********************************************************************主函数*********************************************************************/ void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(DOUT==0)//当浓度高于设定值时,执行条件函数{delay();//延时抗干扰if(DOUT==0)//确定浓度高于设定值时,执行条件函数{LED=0; //点亮P1.0口灯}}}}/********************************************************************结束*********************************************************************/【与单片机连接测速参考程序】/********************************************************************汇诚科技实现功能: 电机转速表设计使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!#include<reg52.h> //包含单片机寄存器的头文件#include<intrins.h> //包含_nop_()函数定义的头文件sbit RS=P2^0; //寄存器选择位,将RS位定义为P2.0引脚sbit RW=P2^1; //读写选择位,将RW位定义为P2.1引脚sbit E=P2^2; //使能信号位,将E位定义为P2.2引脚sbit BF=P0^7; //忙碌标志位,,将BF位定义为P0.7引脚unsigned char code digit[ ]={"0123456789"}; //定义字符数组显示数字unsigned int v; //储存电机转速unsigned char count; //储存定时器T0中断次数bit flag; //计满1秒钟标志位/*****************************************************函数功能:延时1ms(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒***************************************************/void delay1ms(){unsigned char i,j;for(i=0;i<10;i++)for(j=0;j<33;j++);}/*****************************************************函数功能:延时若干毫秒入口参数:n***************************************************/void delay(unsigned char n){unsigned char i;for(i=0;i<n;i++)delay1ms();}/*****************************************************函数功能:判断液晶模块的忙碌状态返回值:result。
result=1,忙碌;result=0,不忙***************************************************/ unsigned char BusyTest(void){bit result;RS=0; //根据规定,RS为低电平,RW为高电平时,可以读状态RW=1;E=1; //E=1,才允许读写_nop_(); //空操作_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间result=BF; //将忙碌标志电平赋给resultE=0; //将E恢复低电平return result;}/*****************************************************函数功能:将模式设置指令或显示地址写入液晶模块入口参数:dictate***************************************************/void WriteInstruction (unsigned char dictate){while(BusyTest()==1); //如果忙就等待RS=0; //根据规定,RS和R/W同时为低电平时,可以写入指令RW=0;E=0; //E置低电平(根据表8-6,写指令时,E为高脉冲,// 就是让E从0到1发生正跳变,所以应先置"0"_nop_();_nop_(); //空操作两个机器周期,给硬件反应时间P0=dictate; //将数据送入P0口,即写入指令或地址_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=1; //E置高电平_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=0; //当E由高电平跳变成低电平时,液晶模块开始执行命令}/*****************************************************函数功能:指定字符显示的实际地址入口参数:x***************************************************/void WriteAddress(unsigned char x){WriteInstruction(x|0x80); //显示位置的确定方法规定为"80H+地址码x"}/*****************************************************函数功能:将数据(字符的标准ASCII码)写入液晶模块入口参数:y(为字符常量)***************************************************/void WriteData(unsigned char y){while(BusyTest()==1);RS=1; //RS为高电平,RW为低电平时,可以写入数据RW=0;E=0; //E置低电平(根据表8-6,写指令时,E为高脉冲,// 就是让E从0到1发生正跳变,所以应先置"0"P0=y; //将数据送入P0口,即将数据写入液晶模块_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=1; //E置高电平_nop_();_nop_();_nop_();_nop_(); //空操作四个机器周期,给硬件反应时间E=0; //当E由高电平跳变成低电平时,液晶模块开始执行命令}/*****************************************************函数功能:对LCD的显示模式进行初始化设置***************************************************/void LcdInitiate(void){delay(15); //延时15ms,首次写指令时应给LCD一段较长的反应时间WriteInstruction(0x38); //显示模式设置:16×2显示,5×7点阵,8位数据接口delay(5); //延时5ms,给硬件一点反应时间WriteInstruction(0x38);delay(5);WriteInstruction(0x38); //连续三次,确保初始化成功delay(5);WriteInstruction(0x0c); //显示模式设置:显示开,无光标,光标不闪烁delay(5);WriteInstruction(0x06); //显示模式设置:光标右移,字符不移delay(5);WriteInstruction(0x01); //清屏幕指令,将以前的显示内容清除delay(5);}/******************************************************************************函数功能:显示速度提示符******************************************************************************/ void display_sym(void){WriteAddress(0x00); //写显示地址,将在第1行第1列开始显示WriteData('v'); //将字符常量v写入LCDWriteData('='); //将字符常量=写入LCD}/****************************************************************************** 函数功能:显示速度数值******************************************************************************/ void display_val(unsigned int x){unsigned char i,j,k,l; //j,k,l分别储存温度的百位、十位和个位i=x/1000; //取千位j=(x%1000)/100; //取百位k=(x%100)/10; //取十位l=x%10; //取个位WriteAddress(0x02); //写显示地址,将在第1行第3列开始显示WriteData(digit[i]); //将千位数字的字符常量写入LCDWriteData(digit[j]); //将百位数字的字符常量写入LCDWriteData(digit[k]); //将十位数字的字符常量写入LCDWriteData(digit[l]); //将个位数字的字符常量写入LCD}/*******************************************************函数功能:显示速度单位“r/min”********************************************************/void display_unit(void){WriteAddress(0x06); //写显示地址,将在第2行第7列开始显示WriteData('r'); //将字符常量r写入LCDWriteData('/'); //将字符常量/写入LCDWriteData('m'); //将字符常量m写入LCDWriteData('i'); //将字符常量i写入LCDWriteData('n'); //将字符常量n写入LCD}/*******************************************************函数功能:主函数********************************************************/void main(void){LcdInitiate(); //调用LCD初始化函数TMOD=0x51; //定时器T1工作于计数模式1,定时器T0工作于计时模式1;TH0=(65536-46083)/256; //定时器T0的高8位设置初值,每50ms产生一次中断TL0=(65536-46083)%256; //定时器T0的低8位设置初值,每50ms产生一次中断EA=1; //开总中断ET0=1; //定时器T0中断允许TR0=1; //启动定时器T0count=0; //将T0中断次数初始化为0display_sym(); //显示速度提示符display_val(0000); //显示器工作正常标志display_unit(); //显示速度单位while(1) //无限循环{TR1=1; //定时器T1启动TH1=0; //定时器T1高8位赋初值0TL1=0; //定时器T1低8位赋初值0flag=0; //时间还未满1分钟while(flag==0) //时间未满等待;v=(TH1*256+TL1)*60/16; //计算速度,每周产生16个脉冲display_val(v); //显示速度}}/*******************************************************函数功能:定时器T0的中断服务函数********************************************************/void Time0(void ) interrupt 1 using 1 //定时器T0的中断编号为1,使用第1组工作寄存器{count++; //T0每中断1次,count加1if(count==20) //若累计满20次,即计满1秒钟{flag=1; //计满1秒钟标志位置1count=0; //清0,重新统计中断次数}TH0=(65536-46083)/256; //定时器T0高8位重新赋初值TL0=(65536-46083)%256; //定时器T0低8位重新赋初值}/********************************************************************结束*********************************************************************//********************************************************************汇诚科技实现功能:传感器判断程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun*********************************************************************//*********************************************************************************************程序说明************************************1、VCC接电源正极2、GND接电源负极3、OUT接单片机P2.0口功能简介:当传感器接收到信号时,传感器输出低电平,单片机IO口P2.0检测到信号后,单片机IO口P1.0输出低电平*********************************************************************/#include<reg52.h> //库文件#define uchar unsigned char//宏定义无符号字符型#define uint unsigned int //宏定义无符号整型/********************************************************************I/O定义*********************************************************************/sbit LED=P1^0; //定义单片机P1口的第1位(即P1.0)为指示端sbit OUT=P2^0; //定义单片机P2口的第1位(即P2.0)为传感器输出信号的输入端/********************************************************************主函数*********************************************************************/void main(){while(1) //无限循环{LED=1; //熄灭P1.0口灯if(OUT==0)//当传感器检测到磁场时,执行条件函数{LED=0; //点亮P1.0口灯while(!OUT);}}}/********************************************************************结束*********************************************************************//******************************************************************** 实现功能:霍尔传感器计数应用仿真程序使用芯片:AT89S52晶振:11.0592MHZ波特率:9600编译环境:Keil作者:zhangxinchun*********************************************************************/ /*********************************************************************************************程序说明************************************1、VCC接电源正极2、GND接电源负极3、OUT接单片机P3.2口4、共阳数码管功能简介:当传感器检测到磁场信号时,传感器输出信号由高电平跳变到低电平输出,单片机IO口P3.2检测到信号后,数码管显示P3.2口输入的计数。