机械原理 瞬心法求速度共18页文档
机械原理瞬心法求速度
中。
A P14
2 P23
C
3
4
D
P34
❖瞬心P13、P24的位置需用三心定理确定
P24
➢ P13与P12、P23 在同一直
线上, P13又与P14、P34 在同一直
P12
12
P23
线上,
故两直线P12P23 和
P14
3
4
P34
P13
P14P34的交点就是P13。
➢同理,两直线P12P14 和P23P34的交点就是P24 。
公法线n-n上。
2
(2)两构件不组成运动副
不直接接触的两构 件,用三心定理确定 其瞬心的位置.
❖三心定理:
作平面运动的三个构件的三个瞬心位于同一直线上。
例:确定图示铰链四杆机构的瞬心
❖ 机构瞬心数
N=k(k -1 ) /2=4(4-1)/2=6
B
P12
❖ 瞬心P12、P23、P34、P14的 1 位置可直观地确定,标在图
用速度瞬心法对机构进行速度分析
瞬 心 的 概 念
例题
瞬心 数目 位置
定义
• 瞬心就是两构件上瞬时绝对速度相同的重合 点(即等速重合点)。
构件i和构件j的瞬心一般用 Pij或Pji表示。
Pij Pji
分类
• 1 绝对瞬心 当两个构件之中有一个构件固定不动时,则 瞬心处的绝对速度为零,这时的瞬心为绝对 瞬心
v3 vP13 1lP13P14
VP13 1lP13P14 1P13P14l
3.利用瞬心,由“图”求v3。
得: 从机构位置图中量出图长: P13P14=12.3mm,
v3 vP13 1P13P14l
=10×0.0123×2=0.246 m/s
平面机构速度分析的瞬心法机械原理
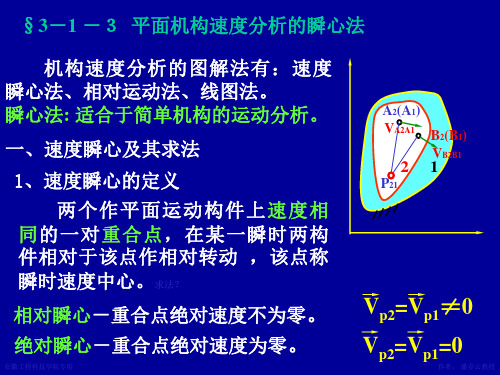
1、速度瞬心的定义
两个作平面运动构件上速度相 同的一对重合点,在某一瞬时两构 件相对于该点作相对转动 ,该点称 瞬时速度中心。求法?
相对瞬心-重合点绝对速度不为零。 绝对瞬心-重合点绝对速度为零。
安徽工程科技学院专用
A (A ) 作者:潘存2 云教1授 VA2A1
2
P21
B2(B1)
56
8
10 15 28
安徽工程科技学院专用
作者: 潘存云教授
3、机构瞬心位置的确定
(1)直接观察法 (利用定义) 适用于求通过运动副直接相联的两构件瞬心位置。
P12
1
2
P12 ∞
1
n
1
2
2
P12 t
1t 2 V12
n
(2有三个瞬 心,且它们位于同一条直线上。此法特别适用 于两构件不直接相联的场合。
如右图所示的三个构件组成的一个机构若p23不与p12p13共线同一直线而在任意一点c则c点在构件2和构件3上的绝对速度的方向不可能相3上的绝对速度的方向不可能相同即绝对速度不相等
§3-1 -3 平面机构速度分析的瞬心法
机构速度分析的图解法有:速度 瞬心法、相对运动法、线图法。 瞬心法: 适合于简单机构的运动分析。
安徽工程科技学院专用
作者: 潘存云教授
用反证法证明:
如右图所示的三个构件组成 的一个机构,若P23不与P12、 P13共线(同一直线),而在任 意一点C,则C点在构件2和构件 3上的绝对速度的方向不可能相 同,即绝对速度不相等。二只有 C点在P12、P13连成的直线上, 才能使绝对速度的方向相同。
安徽工程科技学院专用
作者: 潘存云教授
VB2B1
机械原理速度瞬心法的应用

机械原理速度瞬心法的应用引言在机械原理中,速度瞬心法是一种重要的分析工具。
它可以帮助工程师和设计师理解和预测机械系统中的速度分布和运动性能。
本文将探讨速度瞬心法的基本原理,并介绍其在工程实践中的应用。
速度瞬心法的基本原理速度瞬心法是基于速度分析的一种方法。
它通过计算物体在不同位置上的速度矢量,找到所有速度矢量交点的位置,即为速度瞬心。
速度瞬心表示系统在某一时刻的整体速度特性。
使用速度瞬心法需要以下步骤: 1. 给定物体的速度矢量分布。
2. 绘制速度矢量的平行线。
3. 找到速度矢量平行线的交点,即速度瞬心。
速度瞬心法的应用领域速度瞬心法在许多领域中得到了广泛的应用,下面将介绍一些常见的应用。
1. 机械设计在机械设计中,速度瞬心法可以用来预测机械系统的运动性能。
通过计算机辅助设计软件,工程师可以根据速度瞬心的分布来优化机械系统的设计。
2. 汽车工程在汽车工程中,速度瞬心法可以用于分析汽车的悬挂系统和转向系统。
通过计算速度瞬心,工程师可以优化汽车的悬挂系统,提高行车稳定性和驾驶体验。
3. 机器人工程在机器人工程中,速度瞬心法可以用于分析机器人的运动轨迹和速度分布。
通过计算速度瞬心,工程师可以优化机器人的运动性能,提高机器人的操作精度和效率。
4. 航空航天工程在航空航天工程中,速度瞬心法可以用于分析飞机的空气动力学特性和飞行性能。
通过计算速度瞬心,工程师可以优化飞机的设计,改善飞机的飞行性能。
5. 能源工程在能源工程中,速度瞬心法可以用于分析风力发电机组的运动特性和效率。
通过计算速度瞬心,工程师可以优化风力发电机组的设计,提高能量转换效率。
结论速度瞬心法是一种重要的机械原理分析工具,可以帮助工程师和设计师理解和预测机械系统的运动性能。
它在机械设计、汽车工程、机器人工程、航空航天工程和能源工程等领域都有广泛的应用。
通过应用速度瞬心法,工程师可以优化设计,提高机械系统的性能和效率。
瞬心法求速度

VB2B1
P
1
2
瞬心 绝对速度相等的重合点
VP1 = VP2 相对速度为零的重合点
VP1P2 = 0
2、平面机构瞬心的数目
每两个构件之间有一个瞬心,机构中含有个k个
构件,则全部瞬心的数目 N为:
N
Ck 2
k(k 1) 2
3、瞬心位置的确定
1)两个构件之间用运动副连接时,可直接 判断出的瞬心位置
2)两个构件之间没有用运动副连接时,可 用三心定理求出的瞬心位置
1)两个构件之间用运动副连接的瞬心位置 (1)两个构件用转动副连接时的瞬心位置
1
P12
2
1 2
P12
1 瞬心在转动中心
P12 2
(2)两个构件用移动副连接时的瞬心位置
P12 ∞
1
2
瞬心在垂直导路方向 V12 无穷远处
1)两个构件之间用运动副连接的瞬心位置
2 3
1 4
1、瞬心N=k(k-1)/2=43/2=6 2、找出直接观察出的瞬心 3、利用瞬心多边形判断其余瞬心
P24
1 P12
2
1 P12
2
2 P23
P14
P12
3
P13
ቤተ መጻሕፍቲ ባይዱ
P23 P14
P23 p24
1
4
3
4
3
P13
P43
P43
4
P43
P14
例题二:求出曲柄滑块机构的全部瞬心
1、瞬心N=k(k-1)/2=43/2=6 2、找出直接观察出的瞬心 3、利用瞬心多边形判断其余瞬心
LP13 P14
3 LP13 P 34
1
已知凸轮角速度1,求推杆速度V2
瞬心法求速度
OA r v A r
P
AB
vA vA AP 3 3 OA
AB
r 转向如图 3r 3 vA v B AB BP
A
2 3 OA 3
2 3 r 3
O
vA
60
vB v BA
(c) 90 位置如图 瞬时平动
v DC
M
A
vBC
平面图形内任意点的速度等于该点随图 形绕速度瞬心转动的速度。
速度的分布情况
vM
C
vM vMC MC
M
平面图形内各点速度的大小与该点到速度 瞬心的距离成正比;速度的方向垂直于该点到 速度瞬心的连线,指向图形转动的一方。
三、速度瞬心的确定方法示例
⑴ 平面图形沿一固定表面只滚不滑 速度瞬心:图形与固定面的接触点C
D B O2
A
O1
3、从已知求未知
例8-6 椭圆规尺的A端以速度 v A沿x 轴的负向运动,如图所示,
AB=l。求B端的速度以及尺AB的角速度。
解:⑴ 分析各物体的运动
尺AB作平面运动
滑块A、B作平移
y vB
B
⑵利用瞬心法求解 找出速度瞬心的位置:C
C
vA vA AB AC l sin
解 (1) O1O2 做定轴转动
vO2 O1O2 H ( r1 r2 ) H
vA A
II
vB
v O2
B
(2) 轮 II 在轮 I 上做纯滚动,其接 触点 P 为其速度瞬心 H O1 I
O2
P
vC
vO2 r2 2
2
机械基础与设计原理第六讲速度瞬心法计算机构速度

1A
图中若原动件角速度为ω1, 求构件3的速度为多少?
帅的人一般都上课!
速度瞬心概念
速度大小相等; 速度方向相同。
在某一瞬时,平面中的两构件存在具有绝对速度相 等的一对重合点,且两构件相对于该点做相对转动, 这将该重合点称之为速度瞬心,也称之为瞬心
多指平面内 重合
帅的人一般都上课!
概念解析
帅的人一般都上课!
案例分析
帅的人一般都上课!
特例分析
案例结构特征: 相对杆件平行且相等,机构为平行四边形结构; 运动特点: 1、两曲柄以相同的速度、相同的方 向旋转 2、连杆作平移运动
帅的人一般都上课!
应用实例
帅的人一般都上课!
应用实例
帅的人一般都上课!
双摇杆机构
两连架杆均是摇杆形构成的铰链四杆机构。
帅的人一般都上课!
三心定理案例
P24
P23 P12
P34
P14
P13
帅的人一般都上课!
速度瞬心法应用
帅的人一般都上课!
案例导入
C3
D 2
4 B
1A
图中若原动件角速度为ω1, 求构件3的速度为多少?
帅的人一般都上课!
机械基础与设计原理 第6讲
机构运动速度计算
帅的人一般都上课!
学习目标
知识目标
平面四杆机构的基本概念
铰链机构的组成部分基本形式
曲柄摇杆机构的概念
双曲柄机构
双摇杆机构
导杆机构
摇块定块机构
帅的人一般都上课!
平面连杆机构
平面连杆机构是由一定数量的构件用低副连接而成的机构, 各构件均在相互平行的平面内运动。
帅的人一般都上课!
速度瞬心法2图解法求解速度和加速...

l2w
2 2
sin j 2
0
a2
l1w12
sin(j1
j2
)
l
2w
2 2
sin j 2
l2 cosj2
三、导杆机构
1.位置分析
l1 l4 s
l4i l1eij1 seij3
展开取实部和虚部
l1 cosj1 s cosj3 l4 l1 sinj1 s sinj3
t an j 3
l4 l1 sinj1 l1 cosj1
j2
)
l3w
2 3
l3 sin(j3 j2 )
cos(j 3
j2)
a2
l3w
2 3
l1w12
cos(j1
j3
)
l
2w
2 2
l2 sin(j2 j3 )
cos(j 2
j3)
二、曲柄滑块机构
1.位置分析
l1 l2 xC
l1eij1 l2eij2 xC
l1 sinj1 l2 sinj2 0
一、速度瞬心法
1 速度瞬心:两作相对运动的刚体,其相 对速度为零的重合点。
绝对瞬心:两刚体其一是固定的
1
相对瞬心:两刚体都是运动的
2
A
B
i构件和j构件瞬心的表示方法:Pij或Pji
P12
2 瞬心的数目
N k(k 1) 2
k 为构件数目
3 瞬心的求法
1) 根据瞬心定义直接求两构件的瞬心
P12 12
0
w2
l1w1 cosj1 l2 cosj 2
3.加速度分析
l1w12eij1
l2a2ieij2
l2w
2 2
最新版机械原理精品电子教案课件完美版 §1-4 用速度瞬心法作机构的速度分析

P14 P24 P34
说明 瞬心确定的一种简捷方法为瞬心代号下脚标同号消 去法。 2. 用瞬心法作机构的速度分析 例3-2 平面铰矢量方程图解法作机构的速度 及加速度分析(2/2)
2. 作机构的速度及加速度分析
例 柱塞唧筒六杆机构 例 平面凸轮高副机构
§1-4 用速度瞬心法作机构的速度分析
1.速度瞬心及其位置确定 (1)速度瞬心 两构件上的瞬时等速重 合点(即同速点), 用Pij表示。 绝对瞬心: vP=0 相对瞬心: vP≠0 机构中的瞬心总数目:K=N (N-1)/2 N: 运动构件数
(2)瞬心位置的确定
1)由瞬心定义确定 以转动副相联,瞬心在其中心处; 以移动副相联,瞬心在垂直于其导 路的无穷远处;
用速度瞬心法作机构的速度分析(2/3)
以纯滚动高副相联,瞬心就在其接触点处; 以滚动兼滑动的高副相联,瞬心就在过其接触点处两高副元 素的公法线上。
2)借助三心定理确定 三心定理:彼此作平面运动的三个构件的三个瞬心必位于 同一直线上。
用速度瞬心法作机构的速度分析(3/3)
例3-1 平面铰链四杆机构 解 K=6 P12 P13 P23