答案 控制系统的状态空间描述 习题解答
现代控制理论习题解答(第一章)

Ra
La
i f = 常数
ua
f ia D J
ω
ML
【解】: 设状态变量为:
题 1-2 图
⎡ x1
⎢ ⎣
x
2
⎤ ⎥ ⎦
=
⎡ia ⎢⎣ω
⎤ ⎥ ⎦
其中 ia 为流过电感上的电流, ω 电动机轴上的角速度。 电动机电枢回路的电压方程为:
eb 为电动机反电势。 电动机力矩平衡方程为
•
ua = La ia + Ra ⋅ ia + eb
(4) y (4) + 3y + 2y = −3u + u
【解】:
5
在零初始条件下,方程两边拉氏变换,得到传递函数,再根据传递函数求状态空间 表达式。 此题多解,一般写成能控标准型、能观标准型或对角标准型,以下解法供参考。 (1)传递函数为:
状态空间表达式为:
G(s) =
2
s3 + 2s2 + 4s + 6
1⎤
R 2 C1 −1
R2C2
⎥ ⎥ ⎥
⎡ ⎢ ⎣
x1 x2
⎥⎦
⎤ ⎥ ⎦
+
⎡ ⎢ ⎢ ⎣
1
R1C1 0
⎤ ⎥⎥u i ⎦
y = u0 = [0
1]⎢⎡
⎣
x1 x2
⎤ ⎥ ⎦
(2)
设状态变量: x1 = iL 、 x2 = uc 而
1
根据基尔霍夫定律得: 整理得
•
iL = C uc
•
ui = R ⋅ iL + LiL + uc
•
M D = J ω + fω + M L
《现代控制理论》第三版_.习题答案
K1
0 0 K1
K p
B 0 0 0 0 0
K1
T
K p
C 1 0 0 0 0 0;
1-3.
图
1-29
机械系统。M1
M
受外力
2
作用 f1 f2作用,求M1 M 2运动速度输出的
状态空间表达式。
解:微分方程 M1 y1 f1 K1(c1 c2 ) B1( y1 y2 )
M 2 y2 f2 K2c2 B2 y2 K1(c1 c2 ) B1( y1 y2 )
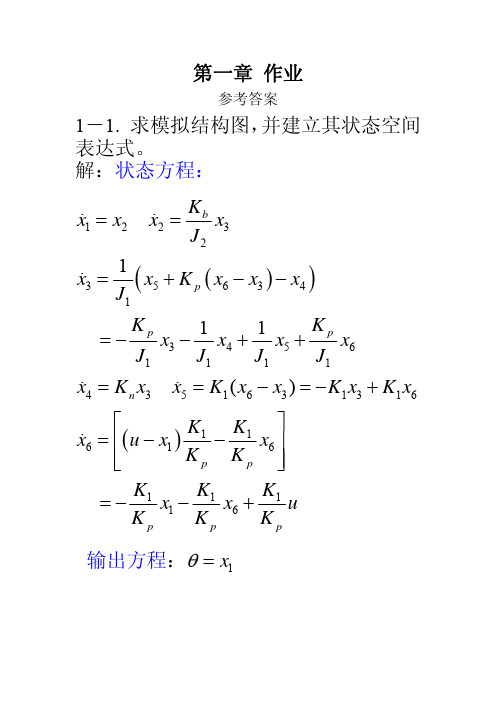
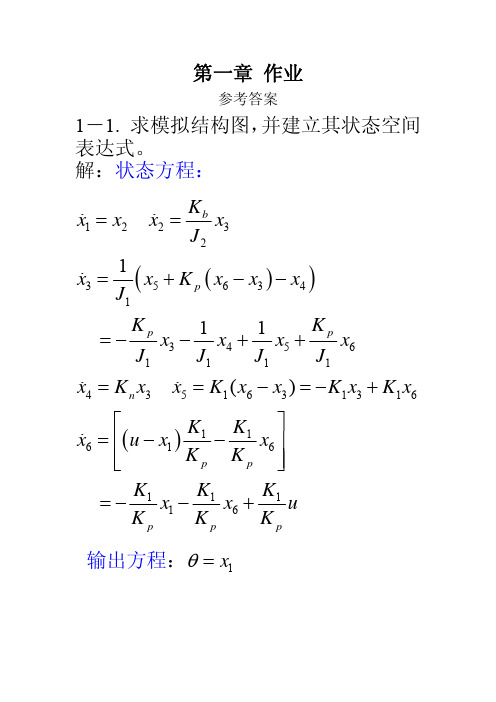
第一章 作业
参考答案
1-1. 求模拟结构图,并建立其状态空间 表达式。 解:状态方程:
x1 x2
x2
Kb J2
x3
x3
1 J1
x5 K p x6 x3 x4
Kp J1
x3
1 J1
x4
1 J1
x5
Kp J1
x6
x4 Kn x3 x5 K1(x6 x3 ) K1x3 K1x6
x 6
设状态变量 x = c1 c2 y1 y2 T
y y1 y2 T ,u f1 f2 T
令 x1 c1, x2 c2, x3 y1, x4 y2
x1 x3 x2 x4
x3
K1 M1
x1
K1 M1
x2
B1 M1
x3
B1 M1
x4
1 M1
f1
x4
K1 M2
x1
K1 K2 M2
第二章 作业
参考答案
2-4. 用三种方法计算eAt (定义法,约 当标准型,拉氏反变换,凯莱哈密顿)
(1)
A
0 4
1 0
直接法(不提倡使用,除非针对一些特
《现代控制理论》第三版_.习题答案
1 0 0 3 1 0 5 2 1 52 7 1 5 2 70 125 3 5 7 5 0 0 1 1 B 2 ; 2 5 5
1 0 a1 0 0 1 0 1 0 0 1 a2 3 7 5
0 B 0 1
C (b0 a0bn ) (bn1 an1bn ) 2 1 0
3 1 a 或者 2 2 1 a1 0 a0
e At I At 1 22 1 33 A t A t 2! 3! t2 t4 t6 t3 t5 1 4 16 64 , 4 16 t 2! 4! 6! 3! 5! 3 5 2 4 6 t t t t t t 4 16 64 , 1 4 16 64 3! 5! 2! 4! 6!
0 0 1 B M 1 0 0 0 0 1 M2
1 0 B 1 M1 B1 M2
1 B1 M1 B1 B2 M2
0
0 0 1 0 C 0 0 0 1
1-5. 根据微分方程, 写状态方程, 画模 拟结构图。
1 a2 a2 2 a1 3 2 a a a 1 2 2 a0
1 a2 a1
1 a2
12 b1 b0
b3 b 2 b1 1 b0
凯莱哈密顿法: 1,2 2 j
0 (t ) 1 1 e1t 1 2(e 2 jt e 2 jt ) (t ) 1 2t 4 2 jt 2 jt e j ( e e ) 2 1
自动控制原理第八章线性系统的状态空间分析与综合习题及解答

第八章 线性系统的状态空间分析与综合习题及解答8-1 已知电枢控制的直流伺服电机的微分方程组及传递函数 b aaa a a E dtdi L i R U ++=+ ⑴设状态变量m m x θ=1,m x θ =2,θ =3x 及输出量m y θ=,试建立其动态方程; ⑵设状态变量m m a x x i x θθ ===321,,及 my θ=,试建立其动态方程。
解:(1)由题意可知: ⎪⎪⎩⎪⎪⎨⎧=======123121xy xx x x x m m mmθθθθ ,由已知 ⎪⎪⎩⎪⎪⎨⎧+===++=m m m m m a m mmb ba a a a a f J M i C M K E E i L i R U θθθ可推导出 ⎪⎪⎪⎩⎪⎪⎪⎨⎧=++-+-===12333221x y U J L C x J L C K f R x J L R J L f x x x x x a ma mm a m b m a m a a m a m 由上式,可列动态方程如下=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+-+-m a a m m a m a m b m a J L R J f L J L C K f R 0100010⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡m a m J L C 00a U y =[]001⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x(2)由题意可知:,1a i x =mm m y x x θθθ===,,32可推导出 ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧==-=-====+--=+--==23133231111x y x J f x J C J f i J C x x x U L x L K x L R U L L K i L R i x m m m m m m m m a m m m m a aa b a a a a m a b a a a aθθθθθ可列动态方程如下由 ⎪⎩⎪⎨⎧===mm m x x x θθθ 321和 ⎪⎩⎪⎨⎧===mm a x x i x θθ 321得 ⎪⎪⎪⎩⎪⎪⎪⎨⎧-=-======3133221x J f x J C J f i J C x x x x x m m m m m m m a m m m m m θθθθ 由上式可得变换矩阵为 ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=m m mm J f J C T 0100018-2 设系统微分方程为 u y y yy 66116=+++ 。
答案 控制系统的状态空间描述 习题解答

第2章 “控制系统的状态空间描述”习题解答2.5 系统的结构如图P2.5所示。
以图中所标记的1x 、2x 、3x 作为状态变量,推导其状态空间表达式。
其中,u 、y 分别为系统的输入、输出,1α、2α、3α均为标量。
3x 2x 图P2.5系统结构图解 图P2.5给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。
状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。
由状态变量图可直接求得系统的状态空间表达式。
着眼于求和点①、②、③,则有①:2111x x x +=α& ②: 3222x x x +=α&③:u x x +=333α&输出y 为1y x du =+,得11122233310001001x a x x a x u x a x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦&&& []123100x y x du x ⎡⎤⎢⎥=+⎢⎥⎢⎥⎣⎦2.8 已知系统的微分方程 (1) u y y y y 354=+++&&&&&&;(2) u u y y -=+&&&&&&32; (3) u u y y y y 75532+=+++&&&&&&&&&。
试列写出它们的状态空间表达式。
(1) 解 选择状态变量1y x =,2yx =&,3y x =&&,则有:122331231543x x x x x x x x u y x =⎧⎪=⎪⎨=---+⎪⎪=⎩&&& 状态空间表达式为:[]112233123010000105413100x x x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦&&&(2) 解 采用拉氏变换法求取状态空间表达式。
现代控制理论章节习题含答案(大学期末复习资料)
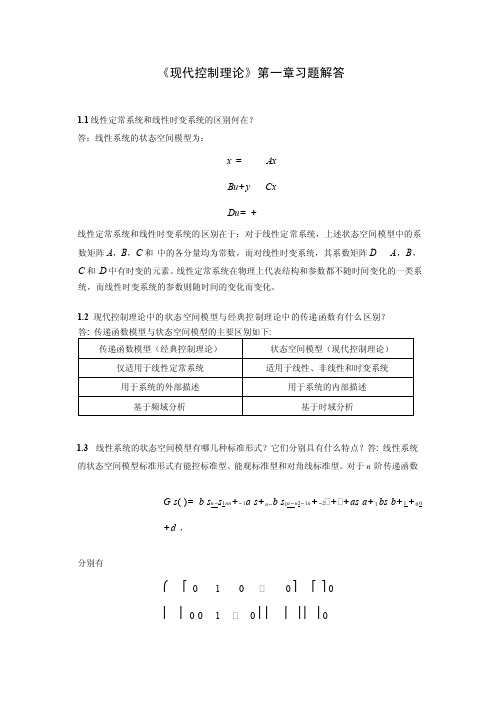
《现代控制理论》第一章习题解答1.1线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:x = AxBu+y CxDu= +线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A,B,C和中的各分量均为常数,而对线性时变系统,其系数矩阵D A,B,C和D中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于n 阶传递函数G s( )= b s n−s1nn+−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0+d ,分别有⎧⎡0 1 0 0 ⎤⎡⎤0⎪⎢0 0 1 0 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎪x =⎢ ⎥x+⎢⎥ u ⑴能控标准型:⎨⎢0 0 0 1 ⎥⎥⎢⎥⎢⎥0⎪⎢⎪⎣⎢−a0 −a1 −a2 −a n−1⎥⎦⎢⎥⎣⎦1⎪⎪⎩y=[b0 b1 b n−2 b n−1]x du+⎧⎡0 0 0 −a0 ⎤⎡b0 ⎤⎪⎪⎢⎢1 0 0 −a1 ⎥⎥⎢⎢b1 ⎥⎥⎪⎪x =⎢0 1 0 −a2 ⎥⎥x+⎢⎢ ⎥⎥u⑵能观标准型:⎨⎢b n−2⎥⎪⎢ ⎥⎢⎪⎣⎢0 0 1 −a n−1⎦⎥⎢⎣b n−1⎥⎦⎪⎪⎩y=[0 0 0 1]x du+⎧⎡p1⎪⎢0⎪x =⎢⎢ 0 p20 0 ⎤⎡1⎤0 ⎥⎢1⎥⎥x+⎢⎥u ⎥⎢ ⎥⎪⑶对角线标准型:⎨⎪⎢⎣0⎪p n⎥⎦⎢⎣1⎥⎦⎪⎩y=[c1 c2 c x du n] + 式中的pp1, 2,, p n和c c1, 2,, c n可由下式给出,G s( )= b s n−s1nn−1a s+n−b s1n−n2−1n+−2 + +as a+1 bs b+1 +0 0 + =d s p−c1 1 + s p−c2 2 + + s p−c n n +d+能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1 外,其余全为0。
现代控制理论习题解答(前五章)
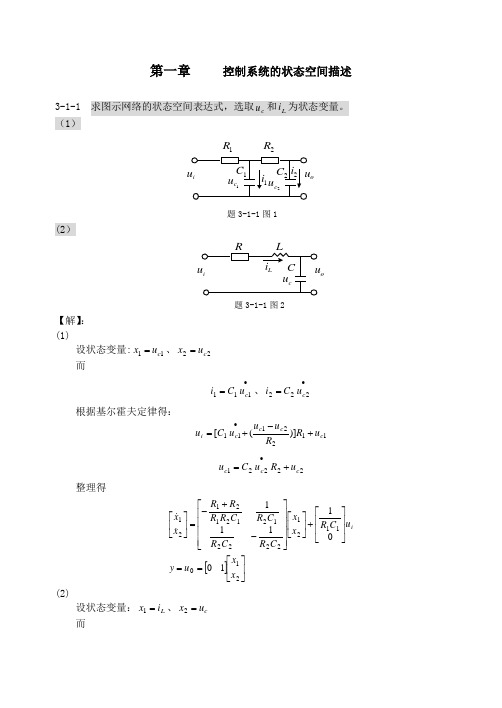
第一章 控制系统的状态空间描述3-1-1 求图示网络的状态空间表达式,选取c u 和L i 为状态变量。
(1)1R 2Ro题3-1-1图1(2)o题3-1-1图2【解】: (1)设状态变量:11c u x =、22c u x =而•=111c u C i 、•=222c u C i根据基尔霍夫定律得:1122111)]([c c c c i u R R u u u C u +-+=•22221c c c u R u C u +=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-+-=⎥⎦⎤⎢⎣⎡210112122221212121211001111x x u y u C R x x C R C R C R C R R R R x x i(2)设状态变量:L i x =1、c u x =2 而•=c L u C i根据基尔霍夫定律得:c L L i u i L i R u ++⋅=•整理得[]⎥⎦⎤⎢⎣⎡==⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21021211001011x x u y u L x x CL L R x x i【解】:此题多解,一般可以写成能控标准型、能观标准型或对角标准型,以下解法供参考。
(1)[]xy u x x 1111006116100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=结构图如图题3-1-5图1所示题3-1-5图1(2)655216552656513)(22222+++-=++--++=++++=s s s s s s s s s s s s s G uy u x x +--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=]25[105610 结构图如图题3-1-5图2(a )所示题3-1-5图2(a)或有312116513)(22+-+-=++++=s s s s s s s G []ux y u x x +--=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=11113002 结构图如图题3-1-5图2(b )所示y题3-1-5图2(b)(3))3()1(4)(2++=s s s s G)1(1)1(2)3(3134)(2+-++-++-+=s s s s s G xy u x x⎥⎦⎤⎢⎣⎡---=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=12313410111000110000300000 结构图如图题3-1-5图3所示题3-1-5图3(4)13332)(232+++++=s s s s s s G []xy u x x 123100331100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=结构图如图题3-1-5图4所示y题3-1-5图43-1-6 将下列状态方程化成对角标准型。
线性控制系统的状态空间描述

§3.3 Matlab 实验
1. 状态空间模型脉冲响应、阶跃响应和任意输入响
应
(1) [y,x,t]=impulse(a,b,c,d)
(2) [y,x,t]=step(a,b,c,d),其中y、x 和t 是输出、
状态向量和仿真时间。
(3) [y,x]=lsim(a,b,c,d,u,t,x0)。
例求管亠[0* x c£,为
u(t) =sint的状态输出值。
解程序和结果如下
-0.2
-0.4
2. 离散系统的脉冲响应、阶跃响应、任意输入响应
⑴[y, x]=dimpulse(sys);
(2) [y, x] = dstep( nu m,de n);
(3) [y, x]=dlsim(sys,u); 47y、x 和u 分别为输出、
状态和输入,sys可以是num,den或a,b,c,d,不绘图,当无y, x时直接绘图。
3 •连续和离散状态模型的零输入响应(只对初态x0 响应)
(1) [y,x,t]=i nitial(a,b,c,d,xO)
⑵[y,x,t]=dinitial(a,b,c,d,x0) ,y 为输出,x 为状态,
t为指定输出时间。
当不带y、x和t时,直接绘图。
4 •连续系统离散化
(1) [da,db,dc,dd]=c2dm(a,b,c,d,Ts)
⑵[dnum,dden]=c2d(num,den,Ts) , Ts 是采样周期。
5.矩阵指数
expm(a*t),其中t可为符号变量,也可为实值。
0 1
例如设A = 0',则求e At的命令和结果如下:
||-4 -4。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第2章 “控制系统的状态空间描述”习题解答
系统的结构如图所示。
以图中所标记的1x 、2x 、3x 作为状态变量,推导其状态空间表达式。
其中,u 、y 分别为系统的输入、输出,1α、2α、3α均为标量。
3
x 2
x 图系统结构图
解 图给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。
状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。
由状态变量图可直接求得系统的状态空间表达式。
着眼于求和点①、②、③,则有
①:2111x x x +=α& ②: 3222x x x +=α&③:u x x +=333α&
输出y 为1y x du =+,得
1112223331000100
1x a x x a x u x a x ⎡⎤
⎡⎤⎡⎤⎡⎤
⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦
&&& []123100x y x du x ⎡⎤
⎢⎥=+⎢⎥
⎢⎥⎣⎦
已知系统的微分方程 (1) u y y y y 354=+++&&&&&&
;(2) u u y y -=+&&&&&&32; (3) u u y y y y 75532+=+++&&&&&&&&&。
试列写出它们的状态空间表达式。
(1) 解 选择状态变量1y x =,2y
x =&,3y x =&&,则有:
1223
31231
543x x x x x x x x u y x =⎧⎪=⎪⎨
=---+⎪⎪=⎩&&& 状态空间表达式为:[]112233123010000105413100x x x x u x x x y x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦
⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦
&&&
(2) 解 采用拉氏变换法求取状态空间表达式。
对微分方程(2)在零初试条件
下取拉氏变换得:
3222332()3()()()
11()12
23()232
s Y s sY s s U s U s s Y s s U s s s s s
+=---==++ 由公式、可直接求得系统状态空间表达式为
1122330100001031002x x x x u x x ⎡⎤
⎢⎥⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢
⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦-⎢⎥
⎣⎦
&&& 123110
2
2x y x x ⎡⎤⎡⎤⎢⎥
=-
⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦
(3) 解 采用拉氏变换法求取状态空间表达式。
对微分方程(3)在零初试条件
下取拉氏变换得:
323()2()3()5()5()7()s Y s s Y s sY s Y s s U s U s +++=+
332
()57
()235
Y s s U s s s s +=+++ 在用传递函数求系统的状态空间表达式时,一定要注意传递函数是否为严格真有理分式,即m 是否小于n ,若m n =需作如下处理
323232()57101518
5()235235
Y s s s s U s s s s s s s +---==+++++++ 再由公式、可直接求得系统状态空间表达式为
112233010000105321x x x x u x x ⎡⎤
⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦&&& []1231005x y x u x ⎡⎤
⎢⎥=+⎢⎥⎢⎥⎣⎦
已知下列传递函数,试用直接分解法建立其状态空间表达式,并画出状态变量
图。
(1)3321()6116s s g s s s s ++=+++ (2)23223
()231
s s g s s s s ++=+++
(1) 解
首先将传函(1)化为严格真有理式即:
232
()6105()11()()6116
Y s s s g s g s U s s s s ---'==+=++++ 令()
()()
Y s g s U s ''=
',则有 123
123
6105()()16116s s s Y s U s s s s
---------''=+++, 123
1
()()
16116E s U s s s s ---''=+++,
即:
1231
2
3
()()6()11()6()()6()10()5()
E s U s s E s s E s s E s Y s s E s s E s s E s ------'=---'=---
由上式可得状态变量图如下:
由状态变量图或公式、直接求得能控标准型状态空间表达式
1122330100001061161x x x x u x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦⎣⎦⎣⎦⎣⎦
&&& []123x y x u x ⎡⎤
⎢⎥+⎢⎥
⎢⎥⎣⎦
=-6-11-6
(2) 解 由已知得:
123
123
23()()123s s s Y s U s s s s
------++=+++, 令: 123
1
()()
123E s U s s s s ---=+++,
得: 1231
2
3
()()2()3()()()()2()3()
E s U s s E s s E s s E s Y s s E s s E s s E s ------=---=++
状态变量图如下:
状态表达式如下:
112233010000101321x x x x u x x ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥---⎣⎦
⎣⎦⎣⎦⎣⎦
&&& []123321x y x x ⎡⎤
⎢⎥=⎢⎥
⎢⎥⎣⎦
列写图所示系统的状态空间表达式。
图
解 设 11()()x s y s = (7) ; 22()()x s y s = (8) 则由系统方框图 2.10P 可得:[]
112()()()c
x s u s x s s a
=-+ (9) []221()()()d
x s u s x s s b
=-+ (10)
对式()()710-进行拉氏反变换得
112121221122()()()()()()()()()()()()
x t ax t cx t cu t x t dx t bx t du t y t x t y t x t =--+=--+==&&
则系统状态空间表达式为
1112221122001001x x u a c c x x u d b d y x y x --⎡⎤⎡⎤⎡⎤
⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦
⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣
⎦⎣⎦⎣⎦
&&
已知系统的状态空间表达式为
[]512315124u y u
--⎡⎤⎡⎤
=+⎢⎥⎢⎥-⎣⎦⎣⎦=+&x x x 求其对应的传递函数。
解
5131--⎡⎤=⎢⎥-⎣⎦A ,25⎡⎤
=⎢⎥
⎣⎦
B ,[]12=
C ,4d = 1()()g s sI d -=-+C A B
1
5131111
()35(5)(1)3s s s s s s s s -+⎡⎤-=⎢⎥
-+⎣⎦
+-⎡⎤-=
⎢⎥++++⎣⎦
I A I A
[]122
()()1121
124355(2)(4)4369168
g s s d
s s s s s s s s -=-++-⎡⎤⎡⎤=+⎢⎥⎢⎥+++⎣⎦⎣⎦
++=++C I A B。