Z变换在求解差分方程中的应用举例
z变换求解差分方程步骤
z变换求解差分方程步骤嘿,咱今儿就来讲讲这用 z 变换求解差分方程的步骤哈。
这可就像是解开一道神秘的谜题呢!你想想,差分方程就像是一个调皮的小精灵,藏着好多秘密等我们去发现。
而 z 变换呢,就是那把神奇的钥匙啦。
首先呢,得把差分方程给它表示清楚咯,可不能模模糊糊的。
就像你要找东西,总得先知道要找啥样的不是?然后对这个差分方程进行 z 变换,这就好比给它施了个魔法,一下子就变得不一样啦。
在这个过程中啊,你得细心点儿,可别弄错啦。
这就跟走迷宫似的,一步错步步错呀。
接着呢,就会得到一个关于 z 的表达式,这可就是我们前进的线索呢。
然后呢,咱得把这个表达式给它化简化简,把那些复杂的东西都去掉,就像给苹果削皮一样,让它露出最精华的部分。
这时候可就考验咱的本事啦,得有耐心,还得有那么点儿小技巧。
再接下来呀,就得求解啦!这就像是终于找到了宝藏的位置,要把它挖出来一样。
把 z 的值求出来,这可不容易呢,但咱不能怕呀,要勇往直前!等求出了 z 的值,可别以为就大功告成咯。
还得把它变回原来的世界,也就是反变换回去。
这就像是把变了形的东西再变回来,可神奇啦。
哎呀,你说这过程是不是挺有意思的?就好像是一场冒险,每一步都充满了挑战和惊喜。
你要是能熟练掌握这 z 变换求解差分方程的步骤,那可就厉害咯,就像是拥有了超能力一样!你想想,以后遇到那些复杂的差分方程,别人都抓耳挠腮不知道咋办的时候,你就能轻松搞定,那多牛呀!这就好比别人还在走路,你都开上小汽车啦,一下子就把他们甩在后面啦。
所以呀,可得好好学这 z 变换求解差分方程的步骤哦,别偷懒,多练练,肯定能掌握得牢牢的。
到时候,不管啥样的难题都难不倒你啦!这多棒呀,是不是?。
matlab中z变换例题

matlab中z变换例题在MATLAB中,我们可以使用z变换来表示离散时间信号。
z变换是傅里叶变换在离散时间信号上的推广,它将离散时间信号表示为一个复平面上的函数。
通过z变换,我们可以对离散时间系统进行分析和设计。
下面介绍两个使用z变换进行分析的例题。
例题1:计算差分方程的z变换考虑一个差分方程:y[n] = 0.5y[n-1] + x[n] + x[n-1],其中x[n]是离散时间输入信号,y[n]是输出信号。
我们可以使用z变换将这个差分方程转换为z域的函数。
首先,将差分方程中的y[n]项和x[n]项分别取z变换。
对于y[n],将y[n-1]替换为z^-1Y(z),其中Y(z)是y[n]的z变换。
对于x[n],将x[n]替换为X(z),其中X(z)是x[n]的z变换。
使用这些变换,将差分方程转换为z域的方程:Y(z) = 0.5z^-1Y(z) + X(z) + z^-1X(z)然后,我们可以通过移项,将Y(z)表示为X(z)的函数:Y(z) = X(z) / (1 - 0.5z^-1)这个方程表示了差分方程在z域的表达式。
通过求解这个方程,我们可以得到Y(z)关于X(z)的解析表达式。
例题2:通过z变换分析LTI系统考虑一个线性时不变(LTI)系统,它的差分方程为y[n] - 0.5y[n-1] = x[n],其中x[n]是输入信号,y[n]是输出信号。
我们可以使用z变换对这个系统进行分析。
首先,将差分方程中的y[n]和x[n]分别进行z变换。
对于y[n],将y[n-1]替换为z^-1Y(z),其中Y(z)是y[n]的z变换。
对于x[n],将x[n]替换为X(z),其中X(z)是x[n]的z变换。
使用这些变换,将差分方程转换为z域的方程:Y(z) - 0.5z^-1Y(z) = X(z)然后,我们可以将Y(z)表示为X(z)的函数:Y(z) = X(z) / (1 - 0.5z^-1)这个方程表示了LTI系统在z域的传递函数。
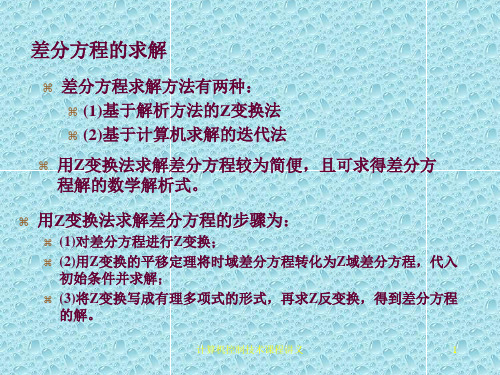
差分方程的求解
计算机控制技术课程讲义
17
4.6 方框图及其分析
脉冲传递函数也可用方块图表示,增加一个部件 —— 采样开关
4.6.1 采样开关位置与脉冲传递函数的关系
1、连续输入,连续输出 2、连续输入,离散输出 3、离散输入,离散输出 4、离散输入,连续输出
例:方框图分析
例1、例2、
计算机控制技术课程讲义 18
计算机控制技术课程讲义 2
做Z反变换,由于 Y ( z) 1 1 1 2 z z 3z 2 z 1 z 2 z z 则Y ( z ) z 1 z 2 查Z变换表可得 y (k T) Z 1[Y ( z )] (1) k (2) k , k 0,1,2,...
两个环节中间无采样开关时
a z (1 e aT ) G ( z ) Z [G1 ( s )G2 ( s )] Z s ( s a ) ( z 1)( z e aT )
G1 ( z )G2 ( z ) G1G2 ( z )
计算机控制技术课程讲义 13
T
Y (s)
D( z ) G1 ( z ) R( z ) Y ( z ) G2 ( z ) D( z ) G1 ( z )G2 ( z ) R( z )
Y ( z) G( z) G1 ( z )G2 ( z ) R( z )
计算机控制技术课程讲义
脉冲传递函数等于两个环 节的脉冲传递函数之积。
但是,对离散系统而言,串联环节的脉冲传递函数不 一定如此,这由各环节之间有无同步采样开关来确定
计算机控制技术课程讲义
10
二、离散系统串联环节 1、串联各环节之间有采样器的情况
G( z)
G1 ( z ) G2 ( z )
差分方程及Z变换工程实例
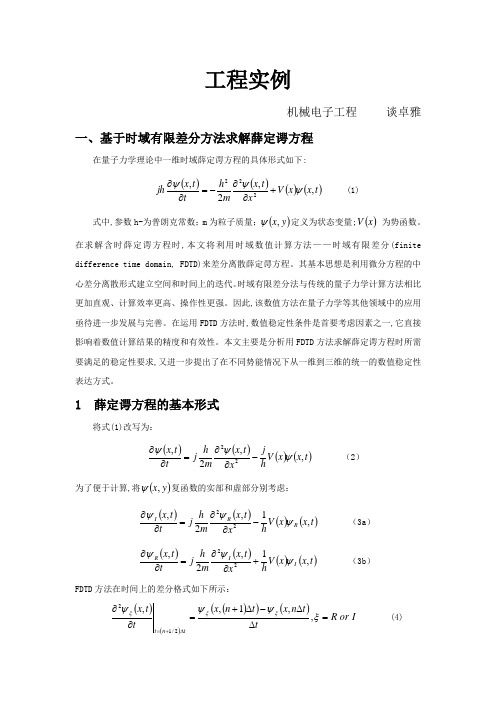
工程实例机械电子工程 谈卓雅一、基于时域有限差分方法求解薛定谔方程 在量子力学理论中一维时域薛定谔方程的具体形式如下:()()()()t x x V x t x m h t t x jh ,,2,222ψψψ+∂∂-=∂∂ (1)式中,参数h-为普朗克常数;m 为粒子质量;()y x ,ψ定义为状态变量;()x V 为势函数。
在求解含时薛定谔方程时,本文将利用时域数值计算方法——时域有限差分(finite difference time domain, FDTD)来差分离散薛定谔方程。
其基本思想是利用微分方程的中心差分离散形式建立空间和时间上的迭代。
时域有限差分法与传统的量子力学计算方法相比更加直观、计算效率更高、操作性更强。
因此,该数值方法在量子力学等其他领域中的应用亟待进一步发展与完善。
在运用FDTD 方法时,数值稳定性条件是首要考虑因素之一,它直接影响着数值计算结果的精度和有效性。
本文主要是分析用FDTD 方法求解薛定谔方程时所需要满足的稳定性要求,又进一步提出了在不同势能情况下从一维到三维的统一的数值稳定性表达方式。
1 薛定谔方程的基本形式将式(1)改写为:()()()()t x x V hj x t x m h j t t x ,,2,22ψψψ-∂∂=∂∂ (2)为了便于计算,将()y x ,ψ复函数的实部和虚部分别考虑: ()()()()t x x V h x t x m h j t t x R R I ,1,2,22ψψψ-∂∂=∂∂ (3a ) ()()()()t x x V h xt x m h j t t x I I R ,1,2,22ψψψ+∂∂=∂∂ (3b )FDTD 方法在时间上的差分格式如下所示: ()()()()()I or R t t n x t n x t t x t n t =∆∆-∆+=∂∂∆+=ξψψψξξξ,,1,,2/12 (4)及空间上的差分格式为: ()()()()()()()[]t n k x t n xk t n k x x x t x t n t x k x ∆-∆+∆∆-∆+∆∆=∂∂∆=∆=,1,2,11,222ξξξξψψψψ (5)同时记()()k t n x k n ψψ⇔∆∆,,将式(4)与式(5)代入式(3)后化简为:()()()()()()[]()()k k V h t k k k x t m h k k n I n I n I n I n R n R 2/12/12/12/1211212+++++∆+-+-+∆∆-=ψψψψψψ (6a) ()()()()()()[]()()k k V h t k k k x t m h k k n R n R n R n R n I n I 2/12/12/12/1211212+++++∆--+-+∆∆+=ψψψψψψ (6b)由此,利用时间步步的迭代可以算出每时刻的函数值。
matlab用z变换求解差分方程
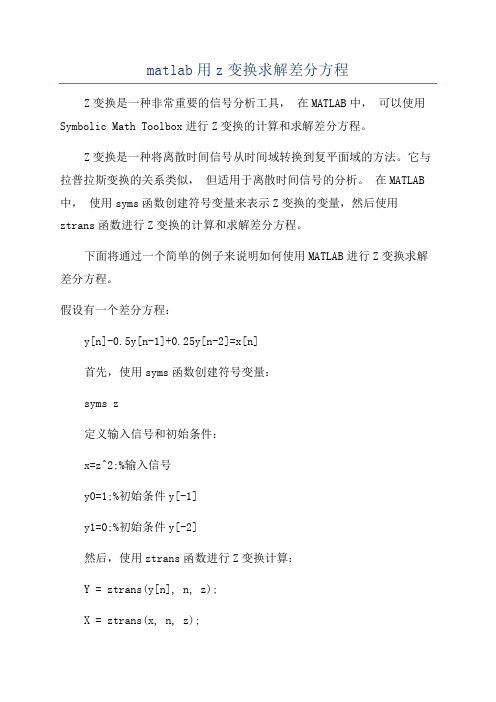
matlab用z变换求解差分方程Z变换是一种非常重要的信号分析工具,在MATLAB中,可以使用Symbolic Math Toolbox进行Z变换的计算和求解差分方程。
Z变换是一种将离散时间信号从时间域转换到复平面域的方法。
它与拉普拉斯变换的关系类似,但适用于离散时间信号的分析。
在MATLAB 中,使用syms函数创建符号变量来表示Z变换的变量,然后使用ztrans函数进行Z变换的计算和求解差分方程。
下面将通过一个简单的例子来说明如何使用MATLAB进行Z变换求解差分方程。
假设有一个差分方程:y[n]-0.5y[n-1]+0.25y[n-2]=x[n]首先,使用syms函数创建符号变量:syms z定义输入信号和初始条件:x=z^2;%输入信号y0=1;%初始条件y[-1]y1=0;%初始条件y[-2]然后,使用ztrans函数进行Z变换计算:Y = ztrans(y[n], n, z);X = ztrans(x, n, z);差分方程中的Y和X分别表示Y(z)和X(z),因此可以写出差分方程的Z变换方程:Y-0.5*z^(-1)*Y+0.25*z^(-2)*Y=X然后,将方程转化为Y(z)的表达式:Y = solve(Y - 0.5*z^(-1)*Y + 0.25*z^(-2)*Y == X, Y);至此,Z变换方程求解完成,可以使用ilaplace函数从Z域转换回时间域,以获得Y[n]的表达式:y = ilaplace(Y, z, n);最后,可以将结果绘制出来:n=-10:10;%时间范围y_n = subs(y, n, n); % 计算y[n]的值stem(n, y_n); % 绘制离散时间信号综上所述,我们可以使用MATLAB的Symbolic Math Toolbox进行差分方程的Z变换求解,这对于信号分析和系统设计非常有用。
(完整版)差分方程的常见解法
(完整版)差分方程的常见解法差分方程的常见解法差分方程是数学中的一种重要方程类型,常用于描述离散事件系统的发展规律。
在求解差分方程时,我们可以采用以下几种常见的解法。
1. 直接求解法直接求解法是最简单且常用的差分方程求解方法之一。
它的基本思想是通过观察差分方程的规律,找到解的形式,并通过代入验证得到确切的解。
举例来说,对于一阶线性差分方程$y_{n+1} = ay_n + b$,我们可以猜测解的形式为$y_n = c\lambda^n$,其中$c$和$\lambda$为待定常数。
将此解代入方程,再通过已知条件解得$c$和$\lambda$的值,从而得到原差分方程的解。
2. 特征方程法特征方程法是一种常用于求解线性齐次差分方程的方法。
对于形如$y_{n+2} = ay_{n+1} + by_n$的差分方程,我们可以通过构造特征方程来求解。
具体步骤是,我们将差分方程中的项移动到一边,得到$y_{n+2} - ay_{n+1} - by_n = 0$。
然后,假设解的形式为$y_n =\lambda^n$,将其代入方程,得到特征方程$\lambda^2 - a\lambda - b = 0$。
解这个特征方程,得到特征根$\lambda_1$和$\lambda_2$,然后通解的形式为$y_n = c_1\lambda_1^n + c_2\lambda_2^n$,其中$c_1$和$c_2$为待定常数。
3. Z 变换法Z 变换法是一种广泛应用于差分方程求解的方法,特别适用于线性时不变差分方程。
该方法的基本思想是将差分方程转化为代数方程,并利用 Z 变换的性质求解。
对于差分方程$y_{n+1} = ay_n + b$,通过取 Z 变换,我们可以得到转化后的方程$Y(z) = azY(z) + b \frac{1}{1 - z^{-1}}$,其中$Y(z)$代表$y_n$的Z 变换。
然后,将方程整理,求解得到$Y(z)$,再通过反 Z 变换将其转换为差分方程的解$y_n$。
利用z变换解差分方程

于是
Y(z) =
br z−r ∑ ak z−k ∑
k= 0 M r= 0 N
M
X(z)
令
H(z) =
∑b z
r r= 0 N k= 0
−r
ak z−k ∑
则
Y(z) = X (z)H(z)
−1
此时对应的序列为 y(n) = F [X(z)H(z)]
差分方程为 例:若描述离散系统的 1 1 y(n) + y(n −1) − y(n − 2) = x(n) 2 2 x(n) = 2n u(n) , y( 已知激励 初始状态 −1) =1, y(−2) = 0, 求系统的零输入响应、 零状态响应和全响应。 求系统的零输入响应、 零状态响应和全响应。
ak z−k [Y(z) = ∑br z−r [X(z) + ∑x(m)z−m] ∑
k= 0 r= 0 m=−r N M −1
如果激励x(n)为因果序列, 如果激励x(n)为因果序列,上式可以写成 x(n)为因果序列
ak z−k [Y(z) = ∑br z−r X(z) ∑
k= 0 r= 0 N M
8.5节已经给出利用 节已经给出利用z 在8.5节已经给出利用z变换解差分方程的简 单实例,本节给出一般规律。 单实例,本节给出一般规律。这种方法的原 理是基于z变换的线性和位移性, 理是基于z变换的线性和位移性,把差分方程 转化为代数方程,从而使求解过程简化。 转化为代数方程,从而使求解过程简化。
k= 0 l =−k r= 0 m=−r −1
若激励x(n)=0,即系统处于零输入状态,此时 若激励x(n)=0,即系统处于零输入状态, x(n)=0,即系统处于零输入状态 差分方程( 差分方程(1)成为齐次方程∑a y(n −源自) =0k=0 kN
6.5 用Z变换解差分方程
上述结论可由s平面与z平面的关系以及H(s)极点 分布与h(t)形状的关系直接得来
(五)由H(z)判定离散系统的稳定性
稳定系统: H z 的全部极点落在单位圆之内。
临界稳定系统:单位圆上有一阶极点,其余极点均位 于单位圆内。
不稳定系统:单位圆外有极点或单位圆上有高阶极点。
第六章 z变换、 离散系统的z域分析 小结
解:
零状态响应,初值为0
(1) Y z 3z 1Y z 2z 2Y z X z 1 z 1
Y z 1 z 1 z ( 2) H z 1 2 X z 1 3z 2z z2
综合
例:书:87页,例8-19
§6.5
用 z 变 换 解 差 分 方 程
§6利用Z变换解差分方程的一般规律; 方法的原理: 基于Z变换的线性和位移性 将差分方程转化为代数方程 使求解过程简化
线性时不变离散系统的差分方程一般形式:
a
k 0
N
k
y( n k ) br x ( n r )
N N A z n 1 k hn ZT Ak zk un k 0 z zk k 0
H z 的极点 zk ,可以是不同的实数或共轭复数, 决定了 hn 的特性。
zk在单位圆内,h(n)为衰减序列
zk在单位圆外, h(n)为发散序列 zk在单位圆上且为一阶: h(n)不衰减也不发散 zk在单位圆上且为高阶: h(n)为发散序列
2) A1 2 ,B1 2,
3) Y z 2
B2 2
z z z 2 2 2 z 1 z2 z 2
n n n
4) yn 2 1 2 2 2n 2 un