雷达原理第7章 角度测量
雷达原理角度测量.

余割平方扇形波束 特点:相同高度上目标回波强度相同,可同时测R、α、β
H
R β
PG t t Ar Pr Ar S2 (4 ) 2 R 4
收发同天线
2 2 PG t Pr (4 )3 R 4
同一高度目标回波强度不变 用途:搜索、警戒、地面测绘
§7.3.2 天线扫描方式
机械扫描 电扫描
P201,图7.1
第二节 测角方法及其比较
§7.2.1 相位法测角
测角原理
接收机
利用多个天线所接收到的回波信号间的相位差测角
目标方向
2
R d sin
R
法线方向 R d sin
d
接收机
2
d sin
ˆ arc sin
,
机械扫描
整体运动
笨重,扫描速度低
反射面运动
笨重,扫描速度高
馈源变动 更轻,扫描速度更高
电扫描
相位扫描、频率扫描、时间延迟法 特点:扫描速度很高,波速控制灵活 缺点:波束宽度展宽,天线增益减小,系统复杂
§7.3.3 相位扫描法
在阵列天线元采用控制移相器相移量的方法改变激励 相位,从而实现电扫描。
测角精度差
d12
接收机 接收机
13
d13 sin 2 N 测角模糊
测角精度高
法线方向
12
13
d13
接收机
13 d13 2 N 12 d12 12
13 arc sin 2 d 13
d13 N INT 12 2 d12
毫米波雷达测角度的原理

毫米波雷达测角度的原理
毫米波雷达是一种利用微波信号进行测距和测角度的雷达系统。
它的工作原理是利用毫米波信号穿透障碍物并反射回来,通过接收到的反射信号来计算目标物体的距离和方向。
在进行角度测量时,毫米波雷达会通过发射一束毫米波信号,然后接收目标物体反射的信号来确定目标物体的位置。
利用毫米波信号的短波长和高频率,可以提供高精度的角度测量精度,使得毫米波雷达可以用于定位、测量以及控制应用等各种领域。
此外,毫米波雷达还具有抗干扰能力强,适用范围广等优点,因此在无人驾驶、智能家居、安防等领域都有广泛应用。
- 1 -。
雷达原理(第三版) 丁鹭飞第7章
u2=U2=cos (ωt-90°)
U1、U2为u1、u2的振幅, 通常应保持为常值。现在u1在相位上超 前u2的数值为(90°-φ)。 由图 7.3(a)知:
1 ud 1 u2 u1 2 1 ud 2 u2 u1 2
第 7 章 角度测量
当选取U2>>U1时, 由矢量图 7.3(b)可知
(a)
(b)
图7.4 相位检波器输出特性 (a)U2>>U1; (b)U2=1/2U1
第 7 章 角度测量
2. 测角误差与多值性问题
相位差φ值测量不准, 将产生测角误差, 它们之间的关系如 下[将式(7.2.1)两边取微分]:
d d
2
d cos d
2d cos
d
(7.2.3)
第 7 章 角度测量
天线的方向性可用它的方向性函数或根据方向性函数画出的 方向图表示。但方向性函数的准确表达式往往很复杂, 为便于工 程计算, 常用一些简单函数来近似, 如表 7.1 所示。 方向图的主 要技术指标是半功率波束宽度θ0.5以及副瓣电平。在角度测量时 θ0.5的值表征了角度分辨能力并直接影响测角精度, 副瓣电平则主 要影响雷达的抗干扰性能。 雷达测角的性能可用测角范围、测角速度、测角准确度或精 度、角分辨力来衡量。准确度用测角误差的大小来表示, 它包括 雷达系统本身调整不良引起的系统误差和由噪声及各种起伏因 素引起的随机误差。而测量精度由随机误差决定。角分辨力指 存在多目标的情况下, 雷达能在角度上把它们分辨开的能力, 通 常用雷达在可分辨条件下, 同距离的两目标间的最小角坐标之差 表示。
第 7 章 角度测量
最大信号法测角也可采用闭环的角度波门跟踪进行, 如图
2009312雷达原理第七章
7.1 概 述
雷达测角的物理基础是电波在均匀介质中传 播的直线性和雷达天线的方向性。 由于电波沿直线传播,目标散射或反射电波 波前到达的方向,即为目标所在方向。 天线的方向性可用它的方向性函数或根据方 向性函数画出方向图表示。 雷达测角的性能可用测角范围、测角速度、 测角准确度或精度、角分辨力来衡量。 测角方法有:振幅法测角和相位法测角两类。
第七章 角度测量
第七章 角度测量
7.5.2单脉冲自动测角系统
②和差比较器与和差波束 和差比较器有四个端口,四个端都是匹配的,从∑ 端输入时,1、2 端输出等幅同相信号,△端无信号输出; 从1、2 端输入同相信号时, △端输出差信号。 和信号振幅为:
E E kF ( )[F ( ) F ( ) kF2 ( )
第七章 角度测量
7.5.1圆锥扫描自动测角系统
7.5.1圆锥扫描自动测角系统 在跟踪状态时,通常误差ε很小而满足ε<<δ,由简 单 的几何关系可以得到角的变化规律为:
cos(st 0 )
U kF ( ) kF ( cos(st 0 ))
2 2
当 12 读数误差不大时 整数部分即为N值。
(
d 13 d 12
来确定N值。 ) 除以 2 所得到商的
12
7.2 测角方法及其比较 7.2.2 振幅法测角 1.最大信号法 2.等信号法
和信号:
( ) K[F(
t
k
t ) F(k t )] 2F 0 K
⑴采用读数精度高的相位计。 ⑵减小值 / d 或增大 d / 。 均可提高测角精度。 增大 d / 虽然可提高测角精度,但在感兴趣的θ范围内,当加大到 一定程度时就出现多值性问题。
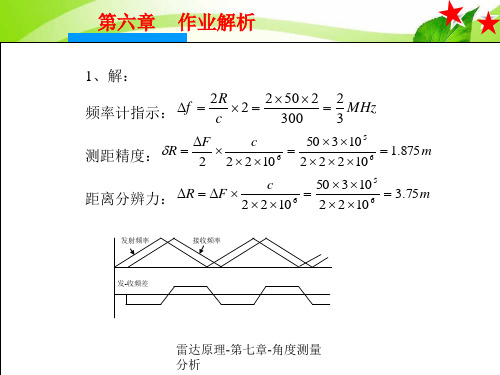
雷达原理-第七章-角度测量分析
混 频器
中放
本振
混 频器
中放
图 7.2雷分相达析位原法理测-第角七方章框-图角度测量
自 动增 益 控制
自 动增 益 控制
相位 比 较器
7.2 测角方法及其比较
为便于讨论, 设变压器的变压比为1∶1, 电压正方向如图 7.3(a)所示,
相位比较器输出端应能得到与相位差φ成比例的响应。为此目的, 当相位
雷达原理-第七章-角度测量 分析
角度测量
本章重点
➢相位法测角原理、三天线相位法测角原理 ➢振幅法测角的基本原理 ➢天线相位、频率及时间延迟扫描法的基本原理 ➢相控阵雷达、数字雷达及三坐标雷达基本原理
雷达原理-第七章-角度测量 分析
角度测量
7.1 概述 7.2 测角方法及其比较 7.3 天线波束的扫描方法 7.4 相控阵雷达、数字雷达及三坐标雷达 7.5 自动测角的原理和方法
主要内容
测角方法 波束的扫描方法 相控阵雷达 数字雷达 三坐标雷达 自动测角原理和方法
雷达原理-第七章-角度测量 分析
角度测量
本章知识点
➢雷达测角的理论基础、相位法测角原理 ➢振幅法测角的基本原理、三天线相位法测角原理 ➢天线波束基本形状、天线波束扫描基本方法 ➢天线相位扫描、频率扫描、时间延迟扫描法的基本工作原理 ➢相控阵雷达、数字雷达及三坐标雷达基本工作原理、常见的 多波束形成技术 ➢雷达目标高度测量的计算 ➢圆锥扫描自动测角基本原理、单脉冲自动测角基本原理
第六章 作业解析
1、解:
频率计指示: f
2R c
2
2 50 2 300
2 MHz 3
测距精度:R
F 2
c 2 2 10 6
50 310 5 2 2 2 10 6
雷达原理运动目标检测PPT课件

2、解:
理论读数测得的角度应为:
sin 1 60
d 360
sin 1 2 60 360
19.4712
两天线测角应为:ˆ
sin
1
64
d 360
sin
1
2
64 360
20.8275
三天线测角时,长基线无Βιβλιοθήκη 糊相位应为:13int
12 3
d13 d12
0
2
4
0.5
intmod2i 2.5,360 0.5,i
0,1,11,
得到各数字移相器控制数据如下表:
i 0 1 2 3 4 5 6 7 8 9 10 11
n(i) 0 2 3 5 6 8 9 11 12 14 15 1
扫描角为 30时,相邻移相器的相移量 360 0.9 sin 30 162 ,得
即信号角频率的变化值ωd = (2vr/c) ω0 = 2π 2vr/λ, 为多普勒 频移。近似后的结果, 与常用的多普勒频率表达式相同。 对 于窄带发射信号而言, 要严格地讨论运动目标回波的特点, 可将 式代入式后, 得到的结果是:
sr (t)
Rek
'
u
c c
vr vr
t
2R0 c vr
exp
j0
c c
vr vr
t
2R0 c vr
Rek
'
u
c c
vr vr
t
2R0 c vr
exp
j0
c c
vr vr
t
2R0 c vr
第20页/共134页
8.1 多普勒效应及其在雷达中的应用
雷达测角度原理

雷达测角度原理
雷达是一种电子设备,通过向外发射微波辐射,探测目标,并通过反射得到目标的位置和速度等信息。
雷达的核心部件是一个小天线,被用来发送和接收电磁波,通过测量反射回来的信号,可以实现目标的定位。
雷达的测角度原理是指通过控制天线的方向,以便获取目标反射信号的方向,从而实现目标的定位。
一、雷达发射器送出微波信号
雷达发射器的作用是产生一定频率的微波信号,将这些信号通过天线发射出去,并且将其传输到天线的方向图范围内。
这些微波信号会像波纹一样向外扩散,以一定的速度传输到遥远的目标物体表面。
二、目标反射回来的微波信号被接收器接收
当微波信号到达目标物体表面时,会反射回来并穿过天线,进入雷达接收器。
接收器会将反射回来的信号放大以便进行处理。
三、天线控制
利用天线控制技术,雷达可以改变天线的一个或多个参数,如方向、倾斜度等,以达到在特定方向上接收微波信号的目的,进而控制雷达的测角度精度。
四、微波信号的运行时间计算
厘米波雷达中微波信号的速度为光速的1/3,通过计算微波信号的运行时间,可以得到目标的距离。
五、“多普勒效应”分析
由于目标相对于雷达具有一定的速度,通过对接收的信号进行分析,可以得到目标的速度信息。
综上所述,雷达测角度原理是在一定方式的微波信号控制下进行的。
通过紧密协调的元件组合和电子信号的处理技术,将微弱的反射信号转化为可用信息。
雷达技术的应用范围十分广泛,例如军事、航空、航海、气象等。
雷达技术的进步促进了人类社会的发展,有着不可替代的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当θ=0时测角误差dθ最小。θ的范围有一定的限制。
2020/12/12
增大d/λ虽可提高测角精度, 但会带来测角模糊
2R2dsin
1
接收 机
d 12
2
R 12
3 R
13
d 13
12 接收 机
13
接收 机
122d12sin2
132d13 sin2N
2020/12/12
Ud2
(b)
(c)
二极管相位检波器电路及矢量图
(a) 电路; (b) U2>>U1; (c) U2=1/2U1
相位检波器两输入信号为
2020/12/12
u1=U1cos (ωt-φ) u2=U2cos (ωt-90°)
ud1
u2
1 2
u1
ud2
u2
1 2
u1
当选取U2>>U1时, 由矢量图 (b)可知
接收 机
2020/12/12
相位法测角方框图
2R2dsin
设两高频信号为
u1=U1 cos (ωt-φ)
本振信号为
u2=U2cos (ωt) uL=ULcos (ωLt+φL)
φ为两信号相位差;φL为本振信号初相。
u1和uL差频得
uI1=UI1cos[(ω-ωL)t-φ-φL]
u2与uL差频得
uI2=UI2cos[(ω-ωL)t-φL]
Uo
Uo KdU1 sin(45°+2 )
π
2
π
0π
π
0
2
2
2
-KdU1 sin(45°-2 )
(a)
(b)
2020/12/12
相位检波器输出特性
(a)U2>>U1;
(b)U2=1/2U1
2 测角误差与多值性
2R2dsin
d 2 d cos d
d d 2 d cos
减少误差的方法: 采用读数精度高(dφ小)的相位计。
根据比值的大小可以判断目标偏离θ0的方向, 查找预先制定 的表格就可估计出目标偏离θ0的数值。
2020/12/12
(2) 和差法: 由u1及u2可求得其差值Δ(θt)及和值Σ(θt)
Δ(θ)=u1(θ)-u2(θ)=K[F(θk-θt)-F(θk+θt)]
在等信号轴θ=θ0 附近,
(t)2t
dF() d 0
F 2( )
1
0 t 2
(a )
( )
响应 (和 波 束 )
(b ) ( )
2020/12/12
(c )
等信号法的特点:
(1) 测角精度比最大信号法高(半功率角2 (2) 可用于自动测角。 (3) 测试系统复杂 (4) 作用距离相对较小
2020/12/12
7.3 天线波束的扫描方法
7.3.1 波束形状和扫描方法
1. 扇形波束
余割平方形
O
(a)
(b)
(a) 地面雷达; (b) 机载雷达
2020/12/12
2.
0 0
仰角扫描 范围
仰 角
方向角
(a)
(b)
(c)
(a) 螺旋扫描; (b) 分行扫描; (c) 锯齿扫描
2020/12/12
7.3.2
1. 机械性扫描
天线摆动机 构
整体移动 移动反射体 移动馈源
2020/12/12
θk为θ0与波束最大值方向的偏角。
波束1接收到的回波信号u1=KF1(θ)=KF(θk-θt), 波束2收到的回波电压值u2=KF2(θ)=KF(-θk-θt)=KF(θk+θt), θt为目标方向偏离等信号轴θ0的角度。
2020/12/12
处理方式 (1) 比幅法
u1() F(k t) u2() F(k t)
• 雷达测角的性能评价 • 测角范围、测角速度、测角准确度或精度和角分
辨力。 • 测量角坐标方法:振幅法,相位法 • 天线对准目标后才有明显的回波(天线扫描)
2020/12/12
2020/12/12
7.2 测角方法与比较
7.2.1 相位法测角
1基本原理
目标 方向
1
法线 方向
2
R=d si n
d
接收 机
三天线相位法测角原理示意图
7.2.2 振幅法测角
1. 最大信号法
s
a
360 60
1 fr
回波脉冲最大值,即为目标所在处
特点:测量方法简单 信噪比高,作用距离远 最强点不易判断,测量精度不高 (半功率角20%) ,存在量化误差 不能用于自动测角
2020/12/12
2. 等信号法
0
A
C
B
12
12
1
2
ud1 Ud1 U2 12U1sin
ud2
Ud2
U2
1 2U1
sin
故相位检波器输出电压为
UoUo1Uo2KdUd1KdUd2
KdU1sin
当选取1/2U1=U2时
Ud1
2
1 2
U1
sin 45
1 2
Ud 2
2
1 2
U1
sin 45
1
2
2020/12/12
U oK dU 1si4 n5 2K dU 1si4 n5 2
O
(a)
2020/12/12
OC方 向
OA方 向
(b)
等信号法测角 (a) 波束;(b)K型显式器画面
12 OB方 向
设天线电压方向性函数为F(θ), 等信号轴OA的指向为θ0, 则
波束 1、2 的方向性函数可分别写成: F1(θ)=F(θ1)=F(θ+θk-θ0) F2(θ)=F(θ2)=F(θ-θ0-θk)
天线收 发开关
发射机
飞机 目标
接收机
距离高度 显示器
等长 度的ቤተ መጻሕፍቲ ባይዱ波导
输出 喇叭
输入 喇叭
机械扫描特点: 简单,机械惯性大,扫描速度慢
2020/12/12
2. 电扫描 相位扫描法、频率扫描法、时间延迟法等。
d sin
d 0 0
2020/12/12
d
2
k
E()E0E1Ei EN1
N1
K
Σ(θt)=u1(θ)+u2(θ)=K[F(θk-θt)+F(θk+θt)]
在θ0附近可近似表示为
Σ(θt)≈2F(θ0)k
归一化的和差值
t dF() F(0) d 0
Δ/Σ正比于目标偏离θ0的角度θt, 故可用它来判读角度θt 2020/12/12
和差法测角
响应 F 1( )
响应 (差 波 束 )
2020/12/12
2020/12/12
自 动增 益 控制
混 频器
中放
本振
相位 比 较器
混 频器
中放
自 动增 益 控制
相位法测角方框图
VD1
u1
+1 -2u1 +u2
ud1 -
+1
Uo1
-2u1
u2
ud2
Uo2
1
2U1
1 2U1s
in
1
1 2U1
Uo
U2
2U1
1
2U1
Ud1
Ud2
Ud1
(a) VD2
雷达原理第7章 角度测量
7.1 测角概述
确定目标的空间位置必须 测距
目标的方位角
高低角(俯仰角)
测角的物理基础 (1)电波在均匀介质中传播的直线性 (2)雷达天线的方向性
直线性 :理想情况 修正:近距离,远距离
实际情况
2020/12/12
• 方向性: 半功率波束宽度(角度分辨率) 副瓣电平(抗干扰性能)