激光扫描转镜扫描轨迹的分析计算
激光线扫描测量原理及数据处理简介
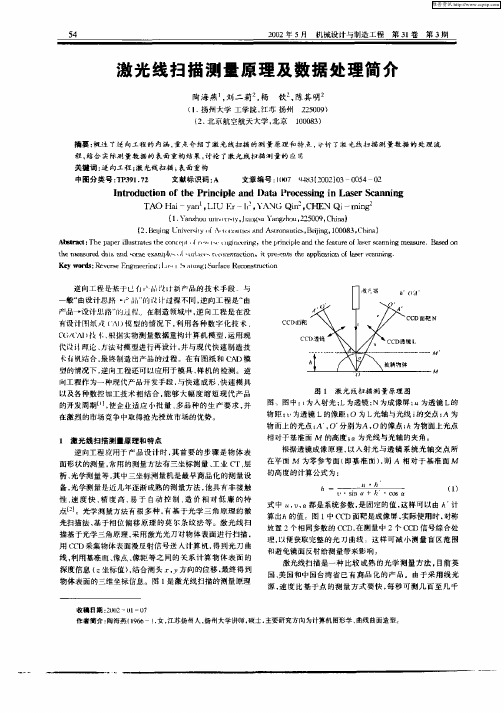
物面上 的光点 ; 0 A , 分别为^. o的像 点 ; h为物 面上光点
相对于基准面 J 的高度 ; Ⅵ n为光线与光轴 的夹 角。 根据 透镜成像原理 , 以^ 射光 与透 镜系统 光轴交 点所 在平面 M 为零参考 面 ( 即基 准面 ) 则 ^ 相 对于基 准面 M , 的高度 的计算公式 为 :
( . a zo lvrl,il uY n zo ,2 0 9 C ia 1Y n huUl tiy 】tg ag h u2 50 , h ) i-s  ̄ f ls n ( .c i iesYo ^ IlUi n smn u c, ei ,00 3C i ) 2 B i gUn rt f ‘Ol t s dA t ad sB i g 10 8 , hn j n v i 'n Ca j n a
激光线扫描测量原理和特点逆向工程应用于产品设计时其首要的步骤是物体表面形状的测量常用的测量方法有三坐标测量工业层析光学测量等其中三坐标测量机是最早商品化的测量设备光学测量是近几年逐渐成熟的测量方法他具有非接触性速度快精度高易于自动控制造价相对低廉的特点
维普资讯
图 1 敲 光 线 扫描 刺 量原 理 图
图。图中: 为人射光 ; i L为透镜 ; N为成像屏 ; “为透镜 L的 物距 ; 为透镜 L的像距 ; O为 L光轴 与光线 i 的交 点 ; A为
在激烈 的市场竞争 中取得抢先投放 市场的优势 。 1 激 光线扫描测 ■原 理和特 点
逆 向工 程麻用于产 品设计 时 , 其首 要的 步骤是 物体 表 面形状 的测量 . 常用的测量方法有三坐标测量 、 工业 CI 层 " 、
用 C D采集物体表 面漫反射信 号送 人计算机 , 到光刀 曲 C 得 线, 利用基准面 、 点 、 像 像距等 之 间的关 系计算 物体 表面 的 深度信息 ( z坐标值 )结 台测头 , , 方向 的位移 , 终得到 最 物体表面 的三维坐标信息 。围 1 是激光线扫描的测量 原理
激光扫描测量技术的数据处理方法

激光扫描测量技术的数据处理方法激光扫描测量技术是一种能够高精度地测量物体形状和尺寸的方法。
随着科技的发展,激光扫描仪的应用越来越广泛,但是如何处理激光扫描仪得到的大量数据成为了一个重要的问题。
本文将介绍几种常见的激光扫描测量技术的数据处理方法,以及它们的优缺点。
一、点云数据处理方法激光扫描仪通过发射激光束到被测物体上,接收激光的反射信号,从而得到点云数据。
点云数据是一组有序的空间点坐标,表示物体表面的三维信息。
处理点云数据是激光扫描测量技术中的核心问题。
1. 点云数据滤波由于环境噪声和仪器误差等原因,点云数据中存在一些无效点和异常点。
滤波是将这些无效点和异常点从点云数据中剔除的过程。
常用的滤波方法有高斯滤波、中值滤波和基于统计学模型的滤波等。
这些滤波方法可以有效地去除点云数据中的噪声,提高数据的质量。
2. 点云数据配准点云数据配准是将多个点云数据集进行匹配,使它们在同一个坐标系下表示被测物体的完整形状。
点云数据配准通常包括刚体变换、非刚体变换和局部配准等方法。
刚体变换是在保持形状不变的情况下对点云数据进行平移、旋转和缩放。
非刚体变换则可以对点云数据进行形变,使其更好地适应被测物体的形状。
3. 点云数据提取点云数据提取是从点云数据中提取出感兴趣的特征信息,如边缘、曲面和拓扑结构等。
点云数据提取的方法有基于几何特征的算法和基于拓扑结构的算法等。
这些方法可以帮助工程师更好地理解被测物体的形状和结构,为后续的分析和设计提供参考。
二、激光测距数据处理方法激光扫描仪能够通过测量激光束在发射和接收过程中的时间差,从而得到被测物体的距离信息。
激光测距数据的处理也是激光扫描测量技术中的重要环节。
1. 激光测距误差校正激光扫描仪在测量过程中可能会受到环境光、温度变化和仪器本身的误差等因素的影响,从而导致测距数据的误差。
误差校正是根据激光扫描仪的特性和实际测量情况,对测距数据进行补偿和修正的过程。
常用的误差校正方法有零点校准、增益校准和非线性校准等。
激光扫描测绘的原理与数据处理方法
激光扫描测绘的原理与数据处理方法近年来,随着科技的不断进步,激光扫描测绘技术在地理信息系统(GIS)、测绘与制图、建筑设计以及城市规划等领域中得到了广泛应用。
该技术基于激光束在目标表面上的反射与散射现象,通过测量激光束的时间、强度和角度等信息,实现对目标表面形态、位置和纹理等特征进行高精度的测量和重建。
本文将主要介绍激光扫描测绘的基本原理以及常用的数据处理方法。
一、激光扫描测绘的基本原理激光扫描测绘技术基于光的三维反射原理,利用激光束的传播、反射与散射过程来实现对目标表面特征的测量与重建。
通常,一台激光扫描仪由激光发射器、接收器和时间测量系统组成。
激光发射器发射出窄束激光束,该激光束在目标表面上发生反射与散射,并被接收器接收。
时间测量系统记录激光束从发射到接收所经过的时间,结合光速的已知值,可计算出激光束的传播距离,从而得到目标表面点的三维坐标。
激光扫描测绘技术具有高精度、大范围和高效率的特点。
其中,高精度是指激光束在目标表面上可以获得亚米级甚至毫米级的测量精度,这主要得益于激光束的窄束性以及时间测量系统的高灵敏度。
大范围是指激光扫描仪可以覆盖数百米乃至数千米范围的区域,保证了对于大区域的地形测量与建模需求。
高效率则体现在激光扫描仪在较短的时间内可以完成对目标区域的全面测量与重建,极大地提高了测绘工作的效率。
二、激光扫描测绘数据的处理方法激光扫描测绘技术可以获取大量的点云数据,其中每个点都包含有三维坐标信息以及强度值等属性。
然而,原始的点云数据是无序的、稀疏的,并且可能包含噪声和异常点。
因此,为了进一步应用和分析,需要对点云数据进行处理。
1. 数据滤波与去噪数据滤波与去噪是激光扫描测绘数据处理的首要步骤,目的是去除噪声和异常点,提取合理的地物表面特征。
常见的滤波方法包括简单高斯滤波、中值滤波、滤波网格等。
这些方法可以使得数据更加光滑、准确,并去除干扰信息,为后续处理提供更好的数据基础。
2. 数据分割与分类数据分割与分类是将点云数据划分为不同的地物或目标类别的过程。
激光扫描数据三维坐标转换的精度分析

激光扫描数据三维坐标转换的精度分析杨 伟,刘 春,刘大杰(同济大学,上海 200092)摘要:激光扫描技术的应用领域越来越广泛。
作为一种采集数据的手段,激光扫描技术已逐步应用到测量工作中来。
本文介绍了激光扫描技术的基本原理和激光扫描数据中的坐标基准,并将激光扫描数据中所采用的三维直角坐标系转换到实际应用的坐标系中,同时还分析了所采用的坐标转换模型本身的精度和转换过程中其它因素对坐标转换结果的影响。
关键词:激光扫描技术;坐标转换;精度中图分类号:P23414文献标识码:BAbstract :The application scope of laser scanning is becoming more and more wide.As a data collec ting meth -od,laser scanning technology has been gradually applied in surveying engineering.The basic principle of that and the base used in laser scanning data are introduced in this paper.Besides,3-D rectangle coordinate system used in laser scanning data is transfor med to practical coordinate syste m.While both the accuracy of coordinate transformation model and the impacts on the transformation result caused by other factors are analyzed.Key words :laser scanning technology;coordinate transformation;accuracy 收稿日期:2003-11-28;修订日期:2004-02-10基金项目:同济大学工科科技发展基金资助作者简介:杨伟(1980-),男(汉族),山西阳泉人,硕士研究生.1 引言利用激光扫描技术获取物体表面的三维信息是最近刚刚兴起的新技术。
使用激光扫描进行三维测绘的技术指南

使用激光扫描进行三维测绘的技术指南激光扫描技术是一种高精度的三维测绘方法,广泛应用于建筑、城市规划、制造业等领域。
它通过激光雷达设备发射激光束,并测量其反射回来的时间和强度,以获取目标物体的三维坐标信息。
本文将为您介绍使用激光扫描进行三维测绘的技术指南,以帮助您了解该技术的基本原理和操作步骤。
一、激光扫描的基本原理激光扫描技术基于激光雷达原理,利用激光束的反射测量物体的距离。
激光器发射出的短脉冲激光束被物体表面反射后,通过接收器接收回来。
由于激光器和接收器之间有固定的时间延迟,用时差来计算激光束从发射到接收所经历的时间,再通过光速的恒定值计算出目标物体的距离。
通过旋转激光器和接收器的组合,可以实现对空间中各个点的扫描,进而构建出三维点云数据。
二、激光扫描的操作步骤1. 设定扫描参数在进行激光扫描之前,需要设定扫描参数,包括激光器的功率、扫描速度、点云密度等。
这些参数的选择应根据具体的测绘要求来确定,以保证测量精度和效率的平衡。
较高的激光功率和扫描速度可以提高测量效率,但可能降低精度,因此需要权衡考虑。
2. 安装设备并校准将激光雷达设备安装在合适的位置上,确保可以覆盖到待测区域。
接下来需要进行设备的校准,包括激光器的平面和垂直校准,以及扫描系统的旋转中心校准。
这些校正工作对于获取准确的测量结果至关重要,因此需要仔细进行。
3. 开始扫描启动激光扫描设备,开始进行数据采集。
设备会自动旋转进行扫描,并实时记录激光束掠过物体表面的反射信号。
在扫描过程中,需要尽量保持设备的稳定,以避免测量误差。
4. 数据处理与分析采集到的数据一般以点云的形式存在,需要进行后续的数据处理和分析。
常见的处理方法包括点云滤波、配准和拼接等。
点云滤波可以去除噪声和离群点,使后续处理更加准确。
配准将多次扫描的点云数据对齐,形成完整的三维模型。
拼接则将多个扫描区域的点云数据融合在一起。
5. 结果展示与应用处理完成后,可以将结果以图形或模型的形式展示出来。
激光扫描共聚焦显微镜使用中荧光共定位的一种计算方法

第36卷第6期 2017年12月电子显微学报Journal o! Chinese Electron Microscopy SocietyVol. 36,No. 62017-12文章编号= 1000-6281(2017)06-0577-05激光扫描共聚焦显微镜使用中荧光共定位的一种计算方法胡西学,郭宏博,甘雅玲*(国家纳米科学中心,北京100190)摘要激光扫描共聚焦显微镜在形态学、分子细胞生物学、神经科学和药理学等研究领域得到广泛地应用,荧光共定位计算是该仪器的一种重要应用功能。
共定位计算的结果为肿瘤治疗过程中药物与肿瘤的作用机理研究提供了依据之一,推动了肿瘤精准定位治疗的发展。
随着科技的进步和科研的深入,人们对共定位的分析结果要求越来越高。
本文提出的激光共聚焦显微镜荧光共定位计算方法,通过3D构建和反卷积,获得了更加真实的荧光共定位计算结果。
关键词激光共聚焦扫描显微镜;荧光共定位计算方法;共定位系数;3D构建;反卷积中图分类号:Q631;Q336 文献标识码:A doi:10. 3969/j. issn. 1000-6281. 2017. 06. 010激光扫描共聚焦显微镜是利用激光作为激发光 源、观察被荧光试剂标记的生物样品的一种光学仪 器。
激光扫描共聚焦显微镜采用激光作为激光光 源,在传统光学显微镜基础上采用共轭聚焦原理和 装置,利用计算机系统对所观察的对象进行数字化 图像的观察、采集、分析和处理[1]。
此系统不仅可 以使用紫外或可见光激发荧光探针,得到细胞或组 织内部微细结构的荧光图像,在亚细胞水平上观察 生理信号及细胞形态的变化[2-9],而且可以动态追 踪一些具有自发荧光药物在细胞内的实时分布、定 位状态[10_13],并对药物在细胞内的聚集和定位进行 定量分析,为药物与肿瘤细胞的相互作用机理研究 提供更加直观的理论数据[14—16]。
作者在激光扫描 共聚焦显微镜的使用过程中发现,使用者在对药物 与细胞亚细胞器之间进行共定位计算时,仅在调节 焦面、采集图片后,通过设置荧光通道的阈值,消除 图像的背景噪音;使用软件计算获得计算的对象,如 图1所示(该图通过本文实验方法获得)。
激光扫描测绘技术原理与算法解读
激光扫描测绘技术原理与算法解读激光扫描测绘技术是一种高精度、高效率的测量方法,通过利用激光束扫描地面或物体,然后根据激光的反射回波来获取目标的三维坐标信息。
它在地理测绘、建筑工程和环境科学等领域得到广泛应用,成为现代测绘技术的重要组成部分。
在激光扫描测绘中,最关键的技术就是激光雷达。
激光雷达能够发射一束脉冲激光,并接收目标物体反射回来的激光,通过测量激光的时间差和角度,可以计算出目标物体距离和方位角。
通过不断的转动激光雷达,就可以扫描周围的环境,获取大量的点云数据。
而要将点云数据转化为可用的测量结果,需要使用一系列的算法和处理技术。
首先是数据预处理,包括点云去噪、滤波和配准等步骤。
去噪是指通过滤除异常点和干扰点来提高点云的精度和可靠性,滤波则是为了减少噪声和平滑点云,配准则是将多次扫描的点云数据进行匹配,以获得更完整和准确的三维模型。
接下来是特征提取和分割,这是为了从点云数据中提取出目标物体的形状和结构信息。
常用的特征包括表面曲率、法向量和法线等,通过对点云进行聚类和分类,可以将点云数据分割成不同的部分,以便后续的建模和分析。
然后是三维重建和模型生成,这一步骤将点云数据转化为三维模型。
常用的算法有曲面拟合、多边形网格重建和体素化等。
曲面拟合可以将离散的点云数据拟合成光滑的曲面模型,多边形网格重建则是将点云生成一个由三角形组成的网格,体素化则是将点云数据转化为体素表示,以方便后续的几何分析和仿真。
最后是数据分析和可视化,这一步骤将模型数据进行分析和展示。
数据分析可以通过提取模型的特征和属性来进行,例如体积、表面积和形状参数等。
而可视化则是将模型数据以图像或者动画的形式展示出来,以便用户更直观地理解和分析。
激光扫描测绘技术的应用非常广泛。
在地理测绘中,它可以用来获取地形和地貌的三维模型,为城市规划和土地评估提供准确的数据基础。
在建筑工程中,激光扫描测绘可以用来进行建筑物的立面分析和结构检测,为设计和施工提供参考。
线扫激光算法原理
一:线扫激光算法原理激光器发出的激光束经准直聚焦后垂直入射到物体表面上,表面的散射光由接收透镜成像于探测器的阵列上。
光敏面于接收透镜的光轴垂直。
如图:当被测物体表面移动x,反应到光敏面上像点位移为x’。
a为接收透镜到物体的距离(物距),b为接收后主面到成像面中心的距离(一般取焦距f),θ为激光束光轴与接收透镜之间的夹角。
D为激光光束轴到透镜中心的距离。
接收透镜的焦距为f,其余的参数如下图:在△ABC中,由正弦定理的:将上式整理得:在直角三角形△CDE (∠CDE=90°)中,将其带入到上式,得:(远离透镜)。
上式为远离透镜的公式,靠近基准面的公式刚好相反:(靠近透镜)。
二:参数计算和选取通过上面的算法推导,我们可以看出在整个公式中,我们需要得到的参数有两个,a (接收透镜到物体的距离(物距))和θ(激光束光轴与接收透镜之间的夹角)。
2.1参数的计算(1)参数计算的原理因为公式中有两个未知的参数a和θ,那么想要求得这两个未知参数,我们可以通过得到两组已知的(x,x’)来列出两个二元一次方程组来求解。
假设两组已知的参数为(X1,X1’)(X2,X2’),通过推导过程的公式如下(以靠近透镜为例):通过计算得出:将求出的θ带去上式可以得出a.(2)参数计算结果在计算参数的样本选取中,为了尽可能的提高精度,我们在靠近基准面的样本中选取的计算组合分别为(1mm,2mm),(1mm,3mm),(1mm,4mm),(1mm,5mm),(1mm,6mm),(1mm,7mm),(1mm,8mm),(1mm,9mm),(1mm,10mm),总共9组数据。
那么我们在一次采样中可以得出9 组数据。
2.2参数的选取在整个的实验过程中,后期计算参数a和θ时,我们总共采样了五次数据,每次数据得到的9组参数,通过45组数据来计算整个样本的位移。
观察误差值得大小,我们总共选取了三组参数,综合比对发现当比值a/(f*sinθ)为31.5~31.7且a>200时,计算出的误差偏小且在测量的范围内保持一定趋势。
激光扫描器扫描成像问题分析
过程 中速度是非线性的 ,在 中间时刻 t 3 =2 “s 速度最低 , 与始末点的速 度差约为 6 ・ m S, 扫描运动速度的不均匀性会造成扫描非 线性畸 变 ,这将 引起 扫描 的几何失真 ,导 致屏上像的畸变 ,从曝光量上讲 ,随时间 缺 少 的部 件 ;光 电跟踪 系统 、激光 投射 系统 等一 系列 应 用中 ,都 充分 显示 了其
维普资讯
中国科技信息l o 年第 3 28 o 期
C I c c N EH OO Y I O ̄A I 曲.O8 HN 9 喻I A 蓦A DTC N LG FI TO N N# 20
激 滗搦
成 ,由转镜镜 面的转动形 成速度 V. 由 和 反 射点 在入 射光 方 向的移 动 形成 的速 度 V, 。易得光斑 在振镜上移 动的距离 为
、
引言
激光扫描技术不仅能应用于激 光电视 显示 领域 ,而 且应 用 于现 代生 活诸 多领
图 2 镜面转动导致振镜上光斑速度随时 间的变化关系
口 ‘
Di M uil o a e s btoI f 嗵j t
点为 入射 光与多边形 外接圆的交点 ,B点 为t 时刻镜面的反射点 , = t 0时刻 , 两点重 合。随 着转镜转 动 ,B点在镜面上不断移
‘ ● ' ● '
的是要寻求一种新的适 用于大屏幕高清晰 电视 显示 或激光投 射 系统 的激 光扫描 器。
面体 转镜 作 为反射镜 来获得行 描 来分析 誊
多 面体 转 镜 拳统 的扫描 成像问 激光; 激光扫描 器; 转镜 一 镜; 散角度 振 发
测绘技术中的激光扫描测量原理和实施步骤
测绘技术中的激光扫描测量原理和实施步骤概述:测绘技术是现代科学技术的重要组成部分,而激光扫描测量作为其中的重要手段,在地理信息系统、城市规划、建筑设计等领域具有不可替代的作用。
本文将介绍激光扫描测量的基本原理和实施步骤。
一、激光扫描测量的基本原理激光扫描测量利用激光束对目标进行扫描,通过光的反射和回波时间计算出目标物的距离、方位和高程等信息。
其基本原理可分为激光发射、探测和数据处理三个过程。
1. 激光发射:激光扫描仪通过内部的激光发射装置产生激光束,并对其进行精确的控制。
激光束经过调制、放大和发射后,对目标进行扫描。
2. 探测:激光束照射到目标物表面后,一部分光会被目标物吸收,而另一部分光会被反射回来。
激光扫描仪中的接收装置会接收到回波的强度和时间信息。
3. 数据处理:接收到回波信息后,激光扫描仪会进行数据处理,根据光的回波时间和强度计算出目标物的距离、方位和高程等测量结果。
二、激光扫描测量的实施步骤激光扫描测量的实施步骤通常包括前期准备、实地测量和数据处理三个阶段。
1. 前期准备在实施激光扫描测量之前,需要进行一些前期准备工作。
首先,需要对测区进行调研,了解其地形地貌特征和测量目的,确定测区的范围和重点。
然后,需要选择合适的激光扫描仪和辅助设备,并进行仪器的校准和调试。
2. 实地测量实地测量是激光扫描测量的核心环节。
在进行实地测量时,需要将激光扫描仪安装在合适的位置,确保其对测区进行全面的覆盖。
同时,需要根据具体情况确定扫描仪的扫描参数,包括扫描角度、扫描密度和扫描速度等。
测量过程中,操作人员需要按照规定的路径和顺序进行移动,确保测量数据的准确性和完整性。
3. 数据处理测量数据采集完成后,需要进行数据处理和分析。
首先,需要将采集到的点云数据进行滤波处理,去除噪声和杂乱点,得到清晰的目标物表面特征。
然后,可以根据需要对数据进行配准和坐标转换,将不同位置、不同时间采集的数据进行融合和整合。
最后,可以利用相应的软件和算法对数据进行提取和分析,得到所需的测量结果。