经济型数控系统介绍
经济型数控铣床主传动及进给传动系统设计

摘要科学技术的不断发展,对机械产品的质量和生产率提出了越来越高要求。
机械加工工艺过程的自动化是实现上述要求的最主要的措施之一。
它不仅提高产品的质量、提高生产效率、降低生产成本、还能够大大改善工人的劳动条件。
大批量的自动化生产广泛采用自动机床、组合机床和专用机床以及专用自动生产线,实行多刀、多工位同时加工,以达到高效率和高自动化。
但这些都属于刚性自动化,在面对小批量生产时并不是适用,因为小批量生产需要经常变化产品的种类,这就要求生产线具有柔性。
而从某种程度上说,数控机床的出现正是很大的满足了这一要求。
数控铣床一般由控制介质、数控装置、伺服系统、机床本体四部分组成。
数控装置的作用是把控制介质、数控装置、伺服系统、机床本体四部分组成。
也就是通过计算机控制铣削。
数控技术是现代制造技术的基础。
它综合了计算机技术、自动控制技术、自动检测技术和精密机械等高新技术,因此广泛应用于机械制造业。
数控机床替代普通机床,从而使得制造业发生了根本性的变化,并带来了巨大的经济效益。
可以预见,高级自动化技术将进一步证明数控机床的价值,并且正在更为广阔的开拓着数控机床的应用领域。
关键词:自动机床,经济型铣床,步进电机,滚珠丝杠副,数控机床ABSTRACTThe continuous development of science and technology, mechanical products, and productivity of the quality of the increasing number of requests. The automation of the process to achieve the above requirements. It not only improves product quality, increase productivity, reduce production costs, but also can greatly improve the working conditions of workers. Large-scale automated production, the widespread use of automatic machines, machine tool and special machine tools and automatic production lines, while the implementation of multi-tool, multi-bit processing in order to achieve high efficiency and degree of automation. These are rigid automation in the face of small batch production, it is not suitable for small batch production, is often necessary to change the type of product, which requires a flexible production line. But to a certain extent, the CNC machine tool is a great meet this requirement. The general control of the media, and numerical control device, the servo system of the CNC milling machine, the body composed of four parts. The numerical control device to control the media, the role of CNC equipment, servo system, four components of the Machine Tool. It is computer-controlled milling machine. CNC technology is the basis of modern manufacturing technology. It combines computer technology, automatic control technology, automatic detection technology, precision machinery and high-tech, it is widely used in machinery manufacturing industry. Instead of general machine tools, CNC machine tools, the manufacturing sector to produce fundamental change, and bring huge economic benefits. It is foreseeable that advanced automation technologies will further demonstrate the value of CNC machine tools, CNC machine tool applications open up a broaderKey words: automatic machine, economic type milling machine, Stepping Motor, Ball Screws目录1 绪论 (1)1.1 选题目的及其意义 (1)1.2 文献综述 (1)1.3 设计任务 (2)2 总体方案的确定 (4)2.1 机械传动部件的选择 (4)2.2 控制系统的设计 (4)3 机械传动部件的计算与选型 (5)3.1 导轨上移动部件的重量估算 (5)3.2 铣削力的计算 (5)3.3 直线滚动导轨副的计算与选型 (5)3.4 滚珠丝杠螺母副的计算与选型 (6)3.5 同步带的计算与选型 (11)3.6 步进电动机的计算与选型 (13)3.7 主轴部件的计算与选型 (16)4 机械标准件的选型与校核 (23)4.1 销连接的选型与校核 (23)4.2 联轴器的选型与校核 (23)4.3 轴承的分类及选用 (25)4.4 键的分类及选用 (28)5 微机控制系统的设计 (29)5.1 微机控制系统组成及特点 (29)5.2 微机控制系统设备介绍 (29)参考文献 (33)致谢 (34)1 绪论1.1 选题目的及其意义本课题来源于基本的工程实际应用,数控机床是机电一体化产品中应用教广泛的一个方向,数控铣床是数控机床中使用最多的机床之一,随着中国工业化进程的推进,数控机床在生产实践中的应用会更加的普及,考虑到数控机床的构造相对复杂,因此以经济型数控机床为入口,对该设备进行研究。
我国当前经济型数控系统主要有三种类型

我国当前经济型数控系统主要有三种类型,改造时,应根据具体情况进行选择。
1、步进电机拖动的开环系统。
该系统的伺服驱动装置主要是、功率步进电机、电液脉冲马达等。
由数控系统送出的进给指令脉冲,经驱动电路控制和功率放大后,使步进电机转动,通过齿轮副与滚珠丝杠副驱动执行部件。
只要控制指令脉冲的数量、频率以及通电顺序和运动方向。
这种系统不需要将所测得的实际位置和速度反馈到输入端,故称之为开环系统,该系统的位移精度主要决定于步进电机的角位移精度,齿轮丝杠等传动元件的节距精度。
所以系统的位移精度较低,其定位精度一般可达+0.02mm.如采取螺距误差及传动间隙补偿,定位精度可提高到+0.01mm.。
在美国、日本和德国等发达国家,它们的机床改造作为新的经济增长行业,生意盎然,正处在黄金时代。
由于机床以及技术的不断进步,机床改造是个"永恒"的课题。
我国的机床改造业,也从老的行业进入到以数控技术为主的新的行业。
在美国、日本、德国,用数控技术改造机床和生产线具有广阔的市场,已形成了机床和生产线数控改造的新的行业。
在美国,机床改造业称为机床再生(Remanufacturing)业。
从事再生业的著名公司有:Bertsche工程公司、ayton 机床公司、Devlieg-Bullavd(得宝)服务集团、US设备公司等。
美国得宝公司已在中国开办公司。
在日本,机床改造业称为机床改装(Retrofitting)业。
从事改装业的著名公司有:大隈工程集团、岗三机械公司、千代田工机公司、野崎工程公司、滨田工程公司、山本工程公司等。
4.2、数控化改造的内容机床与生产线的数控化改造主要内容有以下几点:其一是恢复原功能,对机床、生产线存在的故障部分进行诊断并恢复;其二是NC化,在普通机床上加数显装置,或加数控系统,改造成NC机床、CNC 机床;其三是翻新,为提高精度、效率和自动化程度,对机械、电气部分进行翻新,对机械部分重新装配加工,恢复原精度;对其不满足生产要求的CNC系统以最新CNC进行更新;其四是技术更新或技术创新,为提高性能或档次,或为了使用新工艺、新技术,在原有基础上进行较大规模的技术更新或技术创新,较大幅度地提高水平和档次的更新改造。
广数数控系统对比选择

广数数控系统对比选择目前,数控系统种类繁多,按数控系统的性能价格比分为:经济型数控系统、标准型数控系统、全功能型数控系统和特殊型数控系统四大类产品。
经济型数控系统也称简易数控系统。
其特点是价格便宜、精度适中、功能简化、针对性强,比较适用于老设备技朮改造和产品更新。
标准型数控系统的特点是功能较全,价格适中,适用于中档的数控机床,应用较广。
多功能型数控系统的特点是功能齐全,价格较贵。
适用于加工复杂零件的大中型机床以及FMS、CIMS中使用的数控机床。
特殊型数控系统适用于各类特种加工机床,如:电加工机床,超精加工机床等。
依据经济实用原则。
对中小型车床的改造广泛采用步进电机驱动的开环控制系统。
用经济型数控系统改造后车床的控制原理。
改造后车床可以自动车削圆柱面、圆锥面、端面、球面、螺纹等。
目前,国内生产的经济型数控系统有多种类型。
经济型数控系统主要包括数控装置、坐标轴驱动(或伺服)系统、主轴驱动系统、刀架及辅助功能的强电控制与驱动系统、接口等。
经济型数控装置有步进电机驱动的开环数控装置、直流电机驱动的半闭环数控装置和点位式经济型数控装置三种。
对于数控车床改造一般选用步电机驱动开环数控装置。
选择时主要考虑以下性能:CPU类型、用户容量、控制轴或联动轴数、设定单位、插补类型、编程尺寸及编程标准,G、M、S、T、F功能、刀具补偿功能、间隙补偿功能及循环功能、显示方式及显示信息的形式、绝对编程、增量编程、程序输入方式以及报警、诊断等。
根据需要选择相应的性能。
步进电机驱动单元的性能参数主要有:步进电机性能参数及安装尺寸,控制箱与电机的接线型式等。
系统的快速进给速度、空载起动频率,静态转矩,系统升频降频时间,起动矩频特性、起动惯频特性、运行矩频特性。
驱动电路的型式主要有:高低压驱动电路、斩波驱动电路、调频调压驱动电路、细分驱动电路、电流检测型功率放大电路等。
不同的电路型式、其工作性能不同,根据加工需要合理选择。
刀架控制与驱动系统主要考虑刀架型式(如四位或八位电动刀架,或转塔六位刀架等),定位精度及重复定位精度,换刀时间、刀具选择时刀架的转向、夹紧力,刀杆尺寸及装夹刀具结构型式等性能参数。
数控车床的分类
数控车床的分类数控技术传动系统机床数控车床的分类数控车床可分为卧式和立式两大类。
卧式车床又有水平导轨和倾斜导轨两种。
档次较高的数控卧车一般都采用倾斜导轨。
按刀架数量分类,又可分为单刀架数控车床和双刀架数控车,前者是两坐标控制,后者是4坐标控制。
双刀架卧车多数采用倾斜导轨。
数控车床与普通车床一样,也是用来加工零件旋转表面的。
一般能够自动完成外圆柱面、圆锥面、球面以及螺纹的加工,还能加工一些复杂的回转面,如双曲面等。
车床和普通车床的工件安装方式基本相同,为了提高加工效率,数控车床多采用液压、气动和电动卡盘。
数控车床的外形与普通车床相似,即由床身、主轴箱、刀架、进给系统压系统、冷却和润滑系统等部分组成。
数控车床的进给系统与普通车床有质的区别,传统普通车床有进给箱和交换齿轮架,而数控车床是直接用伺服电机通过滚珠丝杠驱动溜板和刀架实现进给运动,因而进给系统的结构大为简化。
数控车床品种繁多,规格不一,可按如下方法进行分类。
按车床主轴位置分类(1)立式数控车床立式数控车床简称为数控立车,其车床主轴垂直于水平面,一个直径很大的圆形工作台,用来装夹工件。
这类机床主要用于加工径向尺寸大、轴向尺寸相对较小的大型复杂零件。
(2)卧式数控车床卧式数控车床又分为数控水平导轨卧式车床和数控倾斜导轨卧式车床。
其倾斜导轨结构可以使车床具有更大的刚性,并易于排除切屑。
数控技术传动系统机床按加工零件的基本类型分类(1)卡盘式数控车床这类车床没有尾座,适合车削盘类(含短轴类)零件。
夹紧方式多为电动或液动控制,卡盘结构多具有可调卡爪或不淬火卡爪(即软卡爪)。
(2)顶尖式数控车床这类车床配有普通尾座或数控尾座,适合车削较长的零件及直径不太大的盘类零件。
按刀架数量分类(1)单刀架数控车床数控车床一般都配置有各种形式的单刀架,如四工位卧动转位刀架或多工位转塔式自动转位刀架。
(2)双刀架数控车床这类车床的双刀架配置平行分布,也可以是相互垂直分布。
西门子8数控系统的介绍

斜轴(选件)是用于外圆磨床,它是用于一个倾斜的进给轴进行固定角度的插补,刀偏和零点位置是按照右手定则(笛卡儿坐标系)输入,并被转换为实际的机床坐标轴。对于用G05进行的倾斜式横向进给磨削,必须要G07编程产生一个启始位置。
SINUMERIK 814Di是采用NCK(数控核心部件)系统软件,PCU20/50/70,S7-315—2DP集成在MCI板上,SIMATIC DP ET200M/S/X(分布式I/O)作为I/O连接在PROFIBUS-DP上,最大可到18个轴,包括6个通道和方式组。SIMODRIVE POSMO CA/CD(分布式驱动系统,还包括SIMODRIVE POSMO SI,支持SimoCom U软件),可接1FT/1FK交流伺服电机,SIMODRIVE 611UE接1PH4交流主轴电机。
因为看到论坛上有的朋友对西门子的产品线不了解,以及一些功能不常用而不了解,所以选了以上东西写出来。
802C/D都有中文界面,E文不好朋友就用的舒服多了。
SINUMERIK 810D/840Dpowerline,全数字式的数控系统,PCU20/50/70(50/70带有硬盘),SimoDrive 611D(数字型),可配1FT/1FK交流伺服电机,1PH7主轴电机,PLC为S7—300,其中840D中的S7-315-2DP集成在NCU561.2/571.3/572.3/573.3上,S7-314C-2DP集成在NCU562.4/573.4上。在810D中的PLC S7-314集成在CCU1上,S7-315-2DP集成在CCU2/CCU3上。有2个方式组和2个通道(可以理解为带有译码程序段准备和插补的单独的数控系统)。最大为6轴(可有2个主轴,因为有2个通道)。
数控机床的基础知识介绍
第1章 绪 论教学提示:数控机床是采用数字控制技术对机床各移动部件相对运动进行控制的机床,它是典型的机电一体化产品,是现代制造业的关键设备。
计算机、微电子、信息、自动控制、精密检测及机械制造技术的高速发展,加速了数控机床的发展。
目前数控机床正朝着高速度、高精度、高工序集中度、高复合化和高可靠性等方向发展,同时其应用范围也越来越广泛。
教学要求:本章主要讲述数控机床的基本概念和特点、主要技术参数、分类以及技术与发展水平等。
本章内容是数控机床的基本知识和内容,要求学生理解并掌握数控机床的基本概念、组成与特点以及分类,了解其发展趋势和在先进制造技术中的作用。
1.1 概 述1.1.1 数控机床的定义数控即数字控制(Numerical Control ,NC)。
数控技术是指用数字信号形成的控制程序对一台或多台机械设备进行控制的一门技术。
数控机床,简单的说,就是采用了数控技术的机床。
即将机床的各种动作、工件的形状、尺寸以及机床的其他功能用一些数字代码表示,把这些数字代码通过信息载体输入给数控系统,数控系统经过译码、运算以及处理,发出相应的动作指令,自动地控制机床的刀具与工件的相对运动,从而加工出所需要的工件。
实际上,数控机床就是一种具有数控系统的自动化机床。
所以说数控机床是最典型的机电一体化产品。
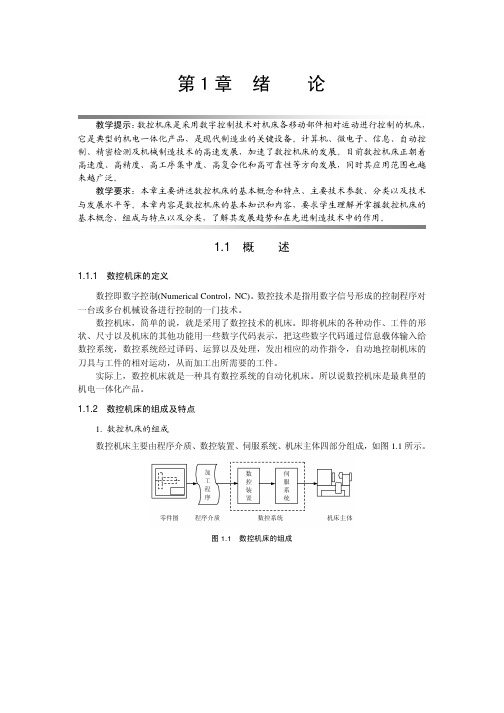
1.1.2 数控机床的组成及特点1. 数控机床的组成 数控机床主要由程序介质、数控装置、伺服系统、机床主体四部分组成,如图1.1所示。
图1.1 数控机床的组成机床数控技术其中,程序介质用于记载机床加工零件的全部信息。
如零件加工的工艺过程、工艺参数、位移数据、切削速度等。
常用的程序介质有磁带、磁盘等。
也有一些数控机床采用操作面板上的按钮和键盘将加工程序直接输入或通过串行接口将计算机上编写的加工程序输入到数控系统。
在计算机辅助设计与计算机辅助制造(CAD/CAM)集成系统中,加工程序可不需要任何载体而直接输入到数控系统。
数控车床CK9930机电连调实训
数控车床CK9930机电连调实训一、ck9930数控车床结构介绍:ck9930数控车床配备的是华中数控i型数控系统,是一种比较老式的小型简易经济型数控系统。
ck9930数控车床就是为两轴车床,床身最小工件调头直径300mm,最小工件长度500mm,刀架上最小调头直径140mm,外型尺寸1100mmx580mmx580mm。
其结构主要存有床身、主轴变速箱、床鞍、卡盘、刀架、丝杠和尾箱等共同组成。
其中,床身就是一个整体的铸件。
刀架通过床鞍征用在床身的导轨上(燕尾槽).ck9930数控车床的运动形式有主运动和进给运动两种。
主运动:工件的旋转运动,是主轴通过卡盘带动工件旋转的运动形式。
进给运动:刀架的横向或纵向的直线运动。
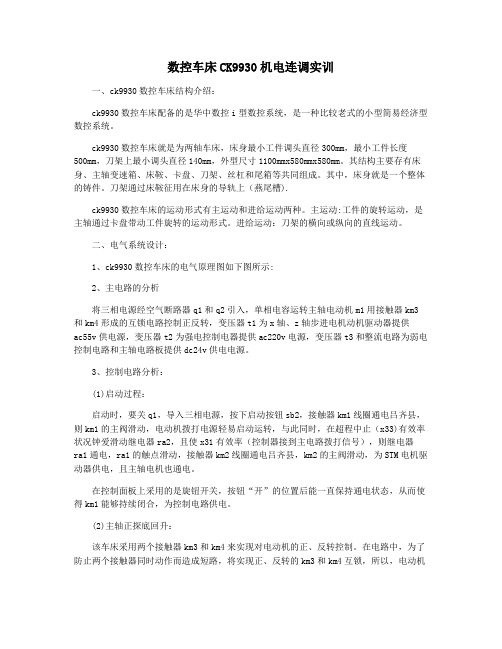
二、电气系统设计:1、ck9930数控车床的电气原理图如下图所示:2、主电路的分析将三相电源经空气断路器q1和q2引入,单相电容运转主轴电动机m1用接触器km3和km4形成的互锁电路控制正反转,变压器t1为x轴、z轴步进电机动机驱动器提供ac55v供电源,变压器t2为强电控制电器提供ac220v电源,变压器t3和整流电路为弱电控制电路和主轴电路板提供dc24v供电电源。
3、控制电路分析:(1)启动过程:启动时,要关q1,导入三相电源,按下启动按钮sb2,接触器km1线圈通电吕齐县,则km1的主阀滑动,电动机拨打电源轻易启动运转,与此同时,在超程中止(x33)有效率状况钟爱滑动继电器ra2,且使x31有效率(控制器接到主电路拨打信号),则继电器ra1通电,ra1的触点滑动,接触器km2线圈通电吕齐县,km2的主阀滑动,为STM电机驱动器供电,且主轴电机也通电。
在控制面板上采用的是旋钮开关,按钮“开”的位置后能一直保持通电状态,从而使得km1能够持续闭合,为控制电路供电。
(2)主轴正探底回升:该车床采用两个接触器km3和km4来实现对电动机的正、反转控制。
在电路中,为了防止两个接触器同时动作而造成短路,将实现正、反转的km3和km4互锁,所以,电动机的正反转控制电路实际上是由互锁的两个方向相反的单向运行线路组成的。
数控铣床概述
数控铣床概述图1-1 立式数控数控铣床概述一.数控铣床的工艺范围数控铣床(Numerical Control Milling Machine)适合于各种箱体类和板类零件的加工。
它的机械结构除基础部件外,还包括主传动系统和进给传动系统,实现工件回转、定位的装置和附件,实现某些部件动作和辅助功能的系统和装置,如液压、气动、冷却等系统和排屑、防护等装置,特殊功能装置,如刀具破损监视、精度检测和监控装置,为完成自动化控制功能的各种反馈信号装置及元件。
铣削加工是机械加工中最常用的加工方法之一,它主要包括平面铣削和轮廓铣削,也可以对零件进行钻、扩、铰、锪及螺纹加工等。
二.数控铣床的分类1.按主轴布置形式分类按机床主轴的布置形式及机床的布局特点分类,可分为数控立式铣床、数控卧式铣床和数控龙门铣床等。
(1) 立式数控铣床一般可进行三坐标联动加工,目前三坐标数控立式铣床占大多数。
如图1-1所示,数控立式铣床主轴与机床工作台面垂直,工件装夹方便,加工时便于观察,但不便于排屑。
一般采用固定式立柱结构,工作台不升降。
主轴箱做上下运动,并通过立柱内的重锤平衡主轴箱的质量。
为保证机床的刚性,主轴中心线距立柱导轨面的距离不能太大,因此,这种结构主要用于中小尺寸的数控铣床。
此外,还有的机床主轴可以绕X 、Y 、Z 坐标轴中其中一个或两个做数控回转运动的四坐标和五坐标数控立式铣床。
通常,机床控制的坐标轴越多,尤其是要求联动的坐标轴越多,机床的功能、加工范围及可选择的加工对象也越多。
但随之而来的就是机床结构更加复杂,对数控系的要求更高,编程难度更大,设备的价格也更高。
数控立式铣床也可以附加数控转盘,采用自动交换台,增加靠模装置来扩大它的功能、加工范围及加工对象,进一步提高生产效率。
(2) 卧式数控铣床卧式数控铣床与通用卧式铣床相同,其主轴轴线平行于水平面。
如图1-2所示,数控卧式铣床的主轴与机床工作台面平行,加工时不便于观察,但排屑顺畅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一台三相反应式步进电动机, 例 1 一台三相反应式步进电动机,采用三相 六拍分配方式, 转子有40 个齿, 40个齿 六拍分配方式 , 转子有 40 个齿 , 脉冲源频 率为600Hz, 600Hz 率为600Hz,求: (1)写出一个循环的通电程序 (2)求步进电动机步距角 (3)求步进电动机转速 n 解:(1)脉冲分配方式有两种: (1)脉冲分配方式有两种: 脉冲分配方式有两种
系统简单、价格最便宜,可用于小型车床、 系统简单、价格最便宜,可用于小型车床、 铣床、钻床和线切割机床。 铣床、钻床和线切割机床。
• 电磁离合器切换的控制系统
用于直流电机或交流异步电机拖动, 用于直流电机或交流异步电机拖动,电磁离 合器切换,以光栅盘、 合器切换,以光栅盘、旋转变压器或感应同步器 检测反馈,常用于中小型机床车削阶梯轴、 检测反馈,常用于中小型机床车削阶梯轴、铣削 阶梯形零件、钻削坐标孔等加工。 阶梯形零件、钻削坐标孔等加工。
步距误差是空载运行一步的实际转角的稳定 值和理论值之差的最大值。 值和理论值之差的最大值。 累积误差是指从任意位置开始, 累积误差是指从任意位置开始,经过任意步 后在此之间,角位移误差的最大值。 后在此之间,角位移误差的最大值。
•最大静转矩 最大静转矩
静转矩指步进电机处于定位状态下的电磁转 它是绕组内电流和失调角的函数。 矩,它是绕组内电流和失调角的函数。 对应于某失调角时,静转矩最大, 对应于某失调角时,静转矩最大,称为最大 静转矩。 静转矩。
输出状态 导电绕组 QA QB QC 1 1 0 0 0 1 1 0 1 1 1 0 0 0 0 0 0 1 1 1 0 A AB B BC C CA A
环形分配表
存储单元地址 K+0 K+1 K+2 K+3 K+4 K+5 单元内容 对应通电相 01H(0001) A 03H(0011) AB 02H (0010) B 06H (0110) BC 04H (0100) C 05H (0101) CA
A-AB-B-BC-C-CA A-AC-C-CB-B-BA
0 0
(2 )
(3 )
θ
b
360 = ZKm
= 360
/ (40 × 2 × 3
)=
1 .5
0
60 f n = ZKm
60 × 600 = = 150 40 × 2 × 3
r / min
BF系列四相单四拍反应式 例2 若一台 BF系列四相单四拍反应式 步进电动机已知步距角为1.80 试问: 1.80, 步进电动机已知步距角为1.80,试问: (1)转子齿数为多少? (1)转子齿数为多少? 转子齿数为多少 (2)写出四相八拍运行方式的一个通电 (2)写出四相八拍运行方式的一个通电 顺序。 顺序。 (3)如果是四相八拍运行 如果是四相八拍运行, (3)如果是四相八拍运行,脉冲频率为 400Hz,其每分钟的转速为多少? 400Hz,其每分钟的转速为多少?
步进电动机的工作原理示意
A-B-C-A
步进电机的通电方式
• 三相单三拍:其一通电顺序: 三相单三拍:其一通电顺序: A-B-C-A • 三相双三拍:其一通电顺序: 三相双三拍:其一通电顺序: AB-BC-CAAB-BC-CA-AB • 三相单/双六拍:其一通电顺序: 三相单/双六拍:其一通电顺序: AB- BC- CAA-AB-B-BC-C-CA-A 步距角比上两种小一倍
I/O接口图
I/O
P1.2 P1.3 P1.4
C相 B相 A相
2.软件环形分配 软件环分的方法是利用计算机程序来设定硬件接口的位状态, 软件环分的方法是利用计算机程序来设定硬件接口的位状态, 从而产生一定的脉冲分配输出。 从而产生一定的脉冲分配输出。 1) 输出接口 输出接口是将计算机的输出端与步进电动机的每相绕组一一对 应起来。 应起来。 8031单片机本身包含4 8031单片机本身包含4 单片机本身包含 I/O端口 分别为P0 端口, P0、 个8位I/O端口,分别为P0、 P1、P2、P3。 P1、P2、P3。 若要实现三相步进电动机 的脉冲分配, 的脉冲分配,需要三根输出口 本例中选P1口的P1.0 P1口的P1.0、 线,本例中选P1口的P1.0、 P1.1、P1.2位作为脉冲分配的 P1.1、P1.2位作为脉冲分配的 输出。 输出。
系统
磁 带 机
单 片 机 功 动
机
机
8-2
步进电机的工作原理及特性
• 步进电机是一种将电脉冲信号转换成相 应角位移的机电执行元件。 应角位移的机电执行元件。
角位移 运行速度
θ
∝ ∝
输入脉冲个数 输入脉冲频率
n
θ∝ N
N 脉冲数
f
n∝f
步进电动机的结构
步进电动机的分类 步进电动机的分类
按步进电动机的工作原理分: 按步进电动机的工作原理分: 1.励磁式 • 电机的定子转子均有绕组 , 靠电磁力矩使 电机的定子转子均有绕组, 转子转动。 转子转动。 2.反应式 • 转子无绕组 , 定子绕组励磁后产生反应力 转子无绕组, 使转子转动。 矩 , 使转子转动 。 这是我国步进电动机发 展的主要类型, 展的主要类型,
步进电动机单双拍运行 步进电动机单双拍运行
三相单/ AB- BC- CA三相单/双6拍运行 A-AB-B-BC-C-CA-A
步距角( 步距角(θb)计算公式 步进电机每输入一个脉冲信号, 步进电机每输入一个脉冲信号,步进电机 转动一定的角度,这个角度称为步距角。 转动一定的角度,这个角度称为步距角。
360 ( 解: 1 ) θ b = ZKm 360 以单四拍计算: Z = = 50 0 1.8 × 4 × 1
(2) A-AB-B-BC-C-CD-D-DA
0
0
(3)
60 f 60 × 400 n = = = 6 0 r / m in ZKm 50 × 4 × 2
步进电动机的主要技术指标与特性 步进电动机的主要技术指标与特性 •精度 精度
f A
f A C B
B C
2.功率放大器 功率放大器
将脉冲分配器的输出信号进行电流放大后给电动机的定子绕组供 使电动机的转子产生输出转矩。 电,使电动机的转子产生输出转矩。
步进电动机的脉冲分配器 步进电动机的脉冲分配器可由硬件或软件方法来实现。 硬件环形分配器:由计数器等数字电路组成的。有较好的响应 硬件环形分配器:由计数器等数字电路组成的。 速度,且具有直观、维护方便等优点。 速度,且具有直观、维护方便等优点。 软件环分:由计算机接口电路和相应的软件组成的。受到微型 软件环分:由计算机接口电路和相应的软件组成的。 计算机运算速度的限制,有时难以满足高速实时控制的要求。 计算机运算速度的限制,有时难以满足高速实时控制的要求。 1.硬件环形分配器 1.硬件环形分配器 2.软件分配 2.软件分配
8031 P1.0 P1.1 P1.2
A 驱 B 动 器 C
2) 输出模型 如果三相步进电动机按单、双拍通电方式工作, 如果三相步进电动机按单、双拍通电方式工作,即: 正转:A-AB-B-BC-C-CA 正转: AB- BC反转:A-AC-C-CB-B-BC 反转: AC- CB根据8031 单片机的基本原理 根据 8031单片机的基本原理 , 对 P1.0 、 P1.1 、 P1.2 位编程使其 8031 单片机的基本原理, 按表规定改变输出状态就实现了三相六拍分配任务。 按表规定改变输出状态就实现了三相六拍分配任务。
二、步进电机的环形分配器
A相 B相 C相
QA
QA
QB
QB
QC
QC
复位
S CAJ
K &
CBJ
K R &
CBJ
K R & CP
+ & & &
+ & &
+ &
W+
QB
QC
QC
QA
QA
QB
号状态 序号 CAJ CBJ CCJ 0 1 2 3 4 5 6 1 0 0 0 1 1 1 1 1 1 0 0 0 1 0 0 1 1 1 0 0
第八章
经济型数控系统
8-1 经济型数控概述 价格低廉, 价格低廉,功能简单的数控系统 一.特点: 特点: 1.无带控制 1.无带控制 2.价格低廉 2.价格低廉 3.编程简单 3.编程简单 4.功能简化 4.功能简化 5.数控装置体积小 5.数控装置体积小
二.经济型数控系统的种类
• 步进电机拖动的开环系统
• 直流伺服电机拖动的控制系统
用直流伺服电机拖动,以编码盘、 用直流伺服电机拖动,以编码盘、旋转变压 器检测反馈。系统的性能范围较广,无噪音、 器检测反馈。系统的性能范围较广,无噪音、精 度高、过载能力强,是经济型数控中的高档产品。 度高、过载能力强,是经济型数控中的高档产品。
经济型微机数控系统原理图
θb
齿距 360 = = 拍数 zkm
0
z-步进电机转子齿数 m-步进电机相数 通电方式: K-通电方式: 单拍、 单拍、双拍 k=1;单/双拍 k=2
步进电机转速计算公式
2π f θb ⋅ f 60 kmz 60 = n= 60 = f 2 ×π 2π kmz
f:电脉冲的频率
一台三相反应式步进电动机, 例 1 一台三相反应式步进电动机,采用三相 六拍分配方式, 转子有40 个齿, 40个齿 六拍分配方式 , 转子有 40 个齿 , 脉冲源频 率为600Hz, 600Hz 率为600Hz,求: (1)写出一个循环的通电程序 (2)求步进电动机步距角 (3)求步进电动机转速 n
8-3
步进电机的驱动电源
功率放大器
功放电路
步进脉冲
f
A 脉 冲 分 配 器 分配器电源 B