关于matlab的直流电机调速系统仿真设计开题报告
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
基于Matlab的V-M双闭环直流调速系统设计及仿真报告(1)

基于Matlab的双闭环调速系统设计报告目录一、摘要 (2)二、总体方案设计 (3)1、控制原理2、控制结构图三、参数计算 (5)1、静态参数设计计算2、动态参数设计计算四、稳定性分析 (8)1、基于经典自控理论得分析2、利用MATLAB辅助分析A、利用根轨迹分析B、在频域内分析奈氏曲线:bode图利用单输入单输出仿真工具箱分析用Simulink仿真五、系统校正 (14)1、系统校正的工具2、调节器的选择3、校正环节的设计4、限流装置的选择六、系统验证 (15)1、分析系统的各项指标2、单位阶跃响应3、Simulink仿真系统验证系统运行情况七、心得体会 (20)八、参考文献 (20)一、摘要运动控制课是后续于自动控制原理课的课程,是更加接近本专业实现应用的一门课程。
直流电动机具有良好的起、制动性能,宜于在大范围内平滑调速,在许多需要调速和快速正反向的电力拖动领域中得到了广泛的应用。
由于直流拖动控制系统在理论上和实践上都比较成熟,而且从控制的角度来看,它又是交流拖动控制系统的基础。
所以加深直流电机控制原理理解有很重要的意义。
本设计首先进行总体系统设计,然后确定各个参数,当明确了系统传函之后,再进行稳定性分析,在稳定的基础上,进行整定以达到设计要求。
另外,设计过程中还要以matlab为工具,以求简明直观而方便快捷的设计过程。
二、总体方案设计1、控制原理根据设计要求,所设计的系统应为单闭环直流调速系统,选定转速为反馈量,采用变电压调节方式,实现对直流电机的无极平滑调速。
所以,设计如下的原理图:图1、单闭环直流调速系统原理图转速用与电动机同轴相连的测速电机产生的正比于转速的电压信号反馈到输入端,再与给定值比较,经放大环节产生控制电压,再通过电力电子变换器来调节电机回路电流,达到控制电机转速的目的。
这里,电压放大环节采用集成电路运算放大器实现,主电路用晶闸管可控整流器调节对电机的电源供给。
所以,更具体的原理图如下:图2、单闭环直流调速系统具体原理图2、控制结构图有了原理图之后,把各环节的静态参数用自控原理中的结构图表示,就得到了系统的稳态结构框图。
基于MATLAB的直流电机双闭环调速系统的设计与仿真
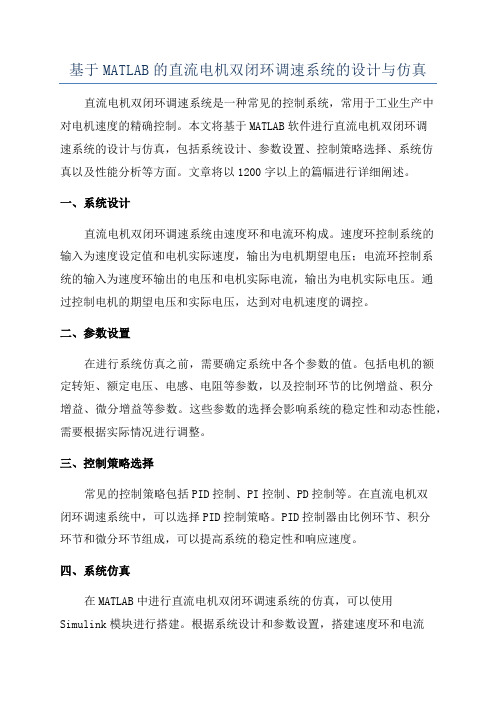
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
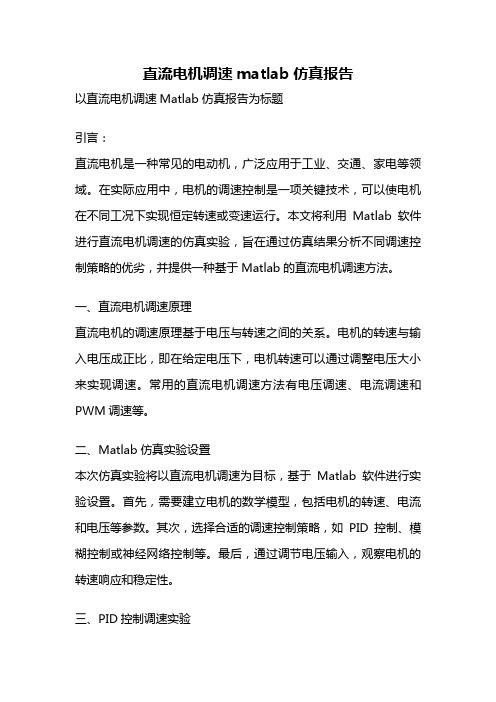
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
基于Matlab的直流电机速度控制

系统仿真课程设计报告设计题目:基于Matlab的直流电机速度控制专业:自动化学生姓名:班级学号:指导教师:开课日期2013年 7 月 1 日至2013年 7 月 13 日南京邮电大学自动化学院一、课程设计题目控制系统的执行机构常用直流电机来驱动,电路和原理示意图如下所示其开环传递函数为()()0001.0)15.0)(1.001.0(01.02+++=+++=s s K R Ls b Js K Vθ ,请用时域分析方法设计PID 控制器,使系统满足下列性能指标要求:当仿真输入是单位阶跃信号时,电机输出转速调整时间小于2秒,超调小于5%,稳态误差小于1%。
要求给出详细的设计步骤,matlab 源码及仿真曲线。
二、实验原理本报告首先介绍了直流电动机的物理模型,并测量计算了它的具体参数。
然后根据牛顿第二定律和回路电压法分别列写运动平衡方程式和电机电枢回路方程式,从而通过一些数学变换抽象出了以电压为输入、转速为输出、电流和转速为状态变量的数学模型。
借助MATLAB 设计simulink 模块调整PID 模块的各项系数,使系统的阶跃响应达到了设计指标。
1、建立该系统的时域数学模型 由克希霍夫定律得:V=R*i+L d id t+e直流电机转矩和电枢电流关系为T=Kt*I电枢旋转产生反电动势与旋转运动角速度的关系为e=K e dθd tk e =ki=k由牛顿定律,转子力矩平衡关系为T i=k i∗iT=k i∗i lJ∗s∗θ+b∗θ=T i−T其中,T:负载转矩,i l:负载电流V(s)=R*I(s)+L*sI(s)+E(s)拉式变换:E=Keθ(s)Jsθ(s)+bθ(s)=K i I(s)−K t I l(s)划去中间变量得:θ(s) v(s)=KLJs2+(Lb+RJ)s+Rb+k i k e开环传递函数为:G(s)=θ(s)v(s)=10.5s2+6s+10.012、PID控制器的功能比例环节:Kp增大等价于系统的开环增益增加,会引起系统响应速度加快,稳态误差减少,超调量增加。
基于MATLAB的直流调压调速控制系统的仿真
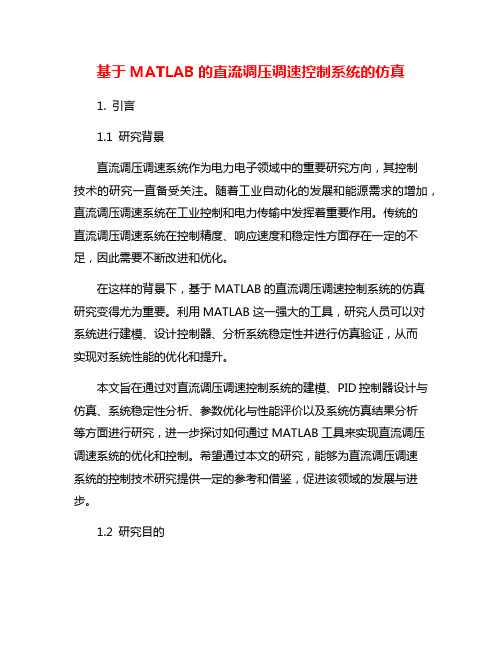
基于MATLAB的直流调压调速控制系统的仿真1. 引言1.1 研究背景直流调压调速系统作为电力电子领域中的重要研究方向,其控制技术的研究一直备受关注。
随着工业自动化的发展和能源需求的增加,直流调压调速系统在工业控制和电力传输中发挥着重要作用。
传统的直流调压调速系统在控制精度、响应速度和稳定性方面存在一定的不足,因此需要不断改进和优化。
在这样的背景下,基于MATLAB的直流调压调速控制系统的仿真研究变得尤为重要。
利用MATLAB这一强大的工具,研究人员可以对系统进行建模、设计控制器、分析系统稳定性并进行仿真验证,从而实现对系统性能的优化和提升。
本文旨在通过对直流调压调速控制系统的建模、PID控制器设计与仿真、系统稳定性分析、参数优化与性能评价以及系统仿真结果分析等方面进行研究,进一步探讨如何通过MATLAB工具来实现直流调压调速系统的优化和控制。
希望通过本文的研究,能够为直流调压调速系统的控制技术研究提供一定的参考和借鉴,促进该领域的发展与进步。
1.2 研究目的直流调压调速控制系统是电气工程中常见的控制系统,在工业生产和实验研究中有着广泛的应用。
研究的目的在于通过MATLAB进行仿真,探究系统的建模、PID控制器设计、系统稳定性分析、参数优化以及性能评价等方面的问题。
通过深入研究直流调压调速控制系统的各种特性及其影响因素,可以更好地理解控制系统的工作原理和性能特点,为实际工程应用提供指导。
通过仿真实验,可以降低实验成本、提高实验效率,并能够在设计过程中进行多次调试和优化,从而得到更加理想的控制效果。
研究直流调压调速控制系统的仿真具有重要的现实意义和理论价值。
通过本研究的深入探讨,不仅可以加深对控制系统理论的理解,还可以为工程实践提供有益的借鉴和指导。
1.3 研究意义直流调压调速控制系统作为工业控制领域中的重要组成部分,其研究具有重要的理论价值和实际应用意义。
首先,在工业生产中,直流调压调速控制系统广泛应用于电动机、风电变流器、UPS电源等设备中,能够实现对电压和速度的精确控制,提高设备的运行效率和稳定性。
双闭环直流调速系统课程设计(matlab仿真设计)

Hefei University电子信息与电气工程系自动化专业控制系统数字仿真与CAD课程报告课题:直流电动机双闭环调速系统仿真班级:08自动化(1)班*名:**0805070073朱彤0805070068李方舟0805070053指导老师:***摘要:双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
它具有动态响应快、抗干扰能力强的优点。
我们知道反馈闭环控制系统具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
采用转速负反馈和PI调节器的单闭环调速系统可以在保证系统稳定的条件下实现转速无静差。
对最常用的转速、电流双闭环调速系统的工程设计方法进行了详细的推导。
然后采用Matlab/Simulink方法对实际系统进行仿真,找出推导过程被忽略的细节部分对调速系统的影响,给出工程设计和实际系统之间产生差距的原因,有助于在实际中设计出较优的系统。
关键词:直流电机调速系统仿真MatlabAbstract: Double closed loop ( speed loop, current loop DC speed control system ) is a kind of current application is wide, economic, applicable power transmission system.The paper presents the derive ationof engineering design methods in the speed regulation system of speed and current double closed loop in details. Then,a demo is designed and simulated by Matlab/Simulink to study the influence resulted from the details of the derivation,which has been ignored in the speed regulation system. The reason of difference between the engineeringdesign and the real conditions is given to help working out theoptimaldesigninpractice. Keywords: DC motor Speed regulation system Simulation Matlab一、双闭环直流调速系统的介绍双闭环(转速环、电流环)直流调速系统是一种当前应用广泛,经济,适用的电力传动系统。
关于matlab的直流电机调速系统仿真设计开题报告

重庆理工大学毕业设计(论文)开题报告题目直流电机调速系统仿真设计1、本课题国内外的研究现状分析直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础,因此,直流调速系统的应用研究有实际意义。
自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。
因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。
MATLAB在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
2、本人对课题任务书提出的任务要求及实现目标的可行性分析(只限工科类)本课题要求完成直流电机双闭环调速系统的工程设计并利用MATLAB实现仿真,通过选择及设计各个模块的系统以及对参数的选择,最终得到预期的仿真结果。
任务要求如下:(1)直流电机调速原理分析(2)双闭环调速系统特性分析(3)系统总体方案设计(4)系统仿真设计可行性分析:本课题是针对直流电动机设计的双闭环调速系统,通过MATLAB软件对所设计的系统进行仿真验证。
通过学习《电机与拖动》、《电力电子技术》、《电力拖动自动控制系统》等相关课程基本掌握了电机调速的一些知识,并对直流电机调速系统有了一定的了解。
同时,通过自学《电机与拖动基础及MATLAB仿真》以及《交直流调速系统与MATLAB仿真》使我对MATLAB软件有了一定的了解,并能通过软件对本课题实现仿真,以上所述便能基本完成本课题的任务要求。
直流调速系统的MATLAB仿真(报告)
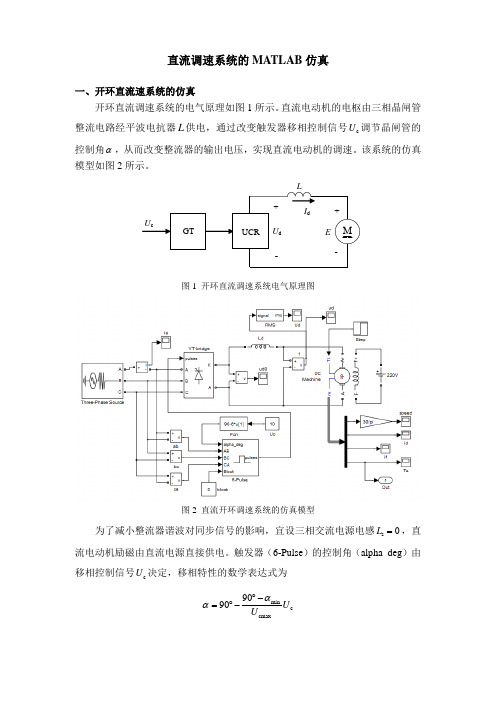
直流调速系统的MATLAB 仿真一、开环直流速系统的仿真开环直流调速系统的电气原理如图1所示。
直流电动机的电枢由三相晶闸管整流电路经平波电抗器L 供电,通过改变触发器移相控制信号c U 调节晶闸管的控制角α,从而改变整流器的输出电压,实现直流电动机的调速。
该系统的仿真模型如图2所示。
图1 开环直流调速系统电气原理图图2 直流开环调速系统的仿真模型为了减小整流器谐波对同步信号的影响,宜设三相交流电源电感s 0L =,直流电动机励磁由直流电源直接供电。
触发器(6-Pulse )的控制角(alpha_deg )由移相控制信号c U 决定,移相特性的数学表达式为minc cmax9090U U αα︒-=︒-在本模型中取min 30α=︒,cmax 10V U =,所以c 906U α=-。
在直流电动机的负载转矩输入端L T 用Step 模块设定加载时刻和加载转矩。
仿真算例1 已知一台四极直流电动机额定参数为N 220V U =,N 136A I =,N 1460r /min n =,a 0.2R =Ω,2222.5N m GD =⋅。
励磁电压f 220V U =,励磁电流f 1.5A I =。
采用三相桥式整流电路,设整流器内阻rec 0.3R =Ω。
平波电抗器d 20mH L =。
仿真该晶闸管-直流电动机开环调速系统,观察电动机在全压起动和起动后加额定负载时的电机转速n 、电磁转矩e T 、电枢电流d i 及电枢电压d u 的变化情况。
仿真步骤:1)绘制系统的仿真模型(图2)。
2)设置模块参数(表1) ① 供电电源电压N rec N 2min 2200.3136130(V)2.34cos 2.34cos30U R I U α++⨯==≈⨯︒② 电动机参数 励磁电阻:f f f 220146.7()1.5U R I ===Ω 励磁电感在恒定磁场控制时可取“0”。
电枢电阻:a 0.2R =Ω电枢电感由下式估算:N a N N 0.422019.119.10.0021(H)2221460136CU L pn I ⨯==⨯≈⨯⨯⨯电枢绕组和励磁绕组间的互感af L :N a N e N 2200.21360.132(V min/r)1460U R I K n --⨯==≈⋅ T e 60600.132 1.262π2πK K ==⨯≈T af f 1.260.84(H)1.5K L I === 电机转动惯量2222.50.57(kg m )449.81GD J g ==≈⋅⨯③ 额定负载转矩L T N 1.26136171.4(N m)T K I ==⨯≈⋅表1 开环直流调速系统主要模型参数3)设置仿真参数:仿真算法odel5s ,仿真时间5.0s ,直流电动机空载起动,起动2.5s 后加额定负载L 171.4N m T =⋅。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
重庆理工大学
毕业设计(论文)开题报告
题目直流电机调速系统仿真设计
1、本课题国内外的研究现状分析
直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以在电气传动中获得了广泛应用。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
直流调速系统在理论上和实践上都比较成热,从控制技术的角度来看,它又是交流调速系统的基础,因此,直流调速系统的应用研究有实际意义。
自从MATLAB的Simulink推出以后,动态系统的仿真就变得非常容易了。
因其含有极为丰富的专用于控制工程与系统分析的函数,具有强大的数学计算功能,且提供方便的图形绘制功能,只要在Simulink中画出系统的动态结构图模型,编写极简单的程序,即可对该系统进行仿真,效率极高,环境友好,从而给系统的设计和校正带来很大的方便。
MATLAB在学术和许多实际领域都得到广泛应用,已成为国际控制界应用最广的语言和工具。
2、本人对课题任务书提出的任务要求及实现目标的可行性分析(只限工科类)
本课题要求完成直流电机双闭环调速系统的工程设计并利用MATLAB实现仿真,通过选择及设计各个模块的系统以及对参数的选择,最终得到预期的仿真结果。
任务要求如下:
(1)直流电机调速原理分析
(2)双闭环调速系统特性分析
(3)系统总体方案设计
(4)系统仿真设计
可行性分析:
本课题是针对直流电动机设计的双闭环调速系统,通过MATLAB软件对所设计的系统进行仿真验证。
通过学习《电机与拖动》、《电力电子技术》、《电力拖动自动控制系统》等相关课程基本掌握了电机调速的一些知识,并对直流电机调速系统有了一定的了解。
同时,通过自学《电机与拖动基础及MATLAB仿真》以及《交直流调速系统与MATLAB仿真》使我对MATLAB软件有了一定的了解,并能通过软件对本课题实现仿真,以上所述便能基本完成本课题的任务要求。
3、本课题的关键问题及解决问题的思路
课题的关键问题:
(1)调节器的工程设计
(2)MATLAB软件的运用及实现对系统的仿真
解决问题的思路:
(1)直流调速系统调节器参数的工程设计包括确定典型系统、选择调节器类型、计算调节器参数、计算调节器电路参数、检验等。
在选择调节器结构时,只采用少量的典型系统,它的参数与系统性能指标的关系都已事先找到,具体选择参数时只需按现成的公式和给定的数据计算即可,这样可使设计方法规范化,大大减少设计工作量。
本课题主要是针对电流调节器和转速调节器进行工程设计。
(2)通过在网上学习MATLAB软件教程以及查阅《交直流调速系统与MATLAB仿真》等相关书籍掌握MATLAB软件的使用方法,并利用此软件对系统进行仿真。
4、完成本课题所需的工作条件(如工具书、计算机、实验、调研等)及解决办法
[1]阮毅、陈伯时,电力拖动自动控制系统,机械工业出版社,2009。
[2]何立民,MCS-51系列单片机应用系统设计系统配置与接口技术,北京航空航
天大学出版社,1990。
[3]王兆安,电力电子技术,机械工业出版社,2000
[4]陈亚爱,电机与拖动基础及MATLAB仿真,机械工业出版社,2011
[5]周渊深,交直流调速系统与MATLAB仿真[M].中国电力出版社.2007
[6]唐介,电机与拖动(第二版)[M].高等教育出版社.2003.
[7]计算机一台
[8]MATLAB仿真软件
5、工作方案分析及进度计划(工作思路)
第1周—第4周:查阅资料,完成文献综述、外文翻译和开题报告
第5周—第8周:工作原理、运行方式及特性分析
第9周—第12周:系统方案设计
第13周—第18周:系统仿真设计
第19周—第23周:撰写论文及答辩准备
报告人:(手签名)
年月日
指导教师意见
指导教师:
年月日
开题报告应根据教师下发的设计(论文)任务书,在指导教师的指导下由学生独立撰写。