液压挖掘机负流量负荷传感控制策略
液压挖掘机的负荷传感技术
第16卷 增刊石家庄铁道学院学报V o l116 Supp1 2003年7月 JOU RNAL O F SH IJ I A ZHUAN G RA I L WA Y I N ST ITU TE Ju l12003液压挖掘机的负荷传感技术王满增1, 祖炳洁2, 贾粮棉2(11石家庄铁道学院教务处,河北石家庄 050043; 21石家庄铁道学院机械工程分院,河北石家庄 050043)摘要:以日本小松PC25液压挖掘机为例,系统分析液压负荷传感技术应用于挖掘机液压泵中,使泵的输出流量自动调节,减少压力损失,提高工作效率。
重点论述负荷传感器的工作原理。
关键词:挖掘机;负荷传感技术;流量控制中图分类号:TH137 文献标识码:A 文章编号:100623226(2003)S1201282031 引言液压负荷传感技术应用于挖掘机的液压系统中,可以控制一个或多个执行元件工作,微调性能非常好;可在满足机器各种控制功能的前提下,减少了压力损失,提高效率,有更佳的经济性、可靠性和先进性。
PC25挖掘机液压系统采用开式中心负荷传感系统(OL SS),该系统是以控制斜盘式柱塞泵斜盘角度的方法,根据外界负荷自动调节液压泵输出流量,以减少溢流和管路压力损失,达到提高发动机效率、节约能源的目的。
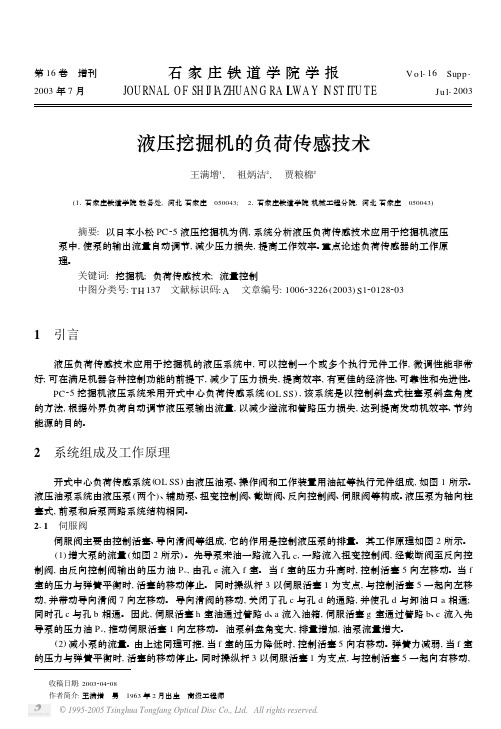
2 系统组成及工作原理开式中心负荷传感系统(OL SS)由液压油泵、操作阀和工作装置用油缸等执行元件组成,如图1所示。
液压油泵系统由液压泵(两个)、辅助泵、扭变控制阀、截断阀、反向控制阀、伺服阀等构成。
液压泵为轴向柱塞式,前泵和后泵两路系统结构相同。
211 伺服阀伺服阀主要由控制活塞、导向滑阀等组成,它的作用是控制液压泵的排量。
其工作原理如图2所示。
(1)增大泵的流量(如图2所示)。
先导泵来油一路流入孔c,一路流入扭变控制阀,经截断阀至反向控制阀,由反向控制阀输出的压力油P c,由孔e流入f室。
当f室的压力升高时,控制活塞5向左移动。
当f 室的压力与弹簧平衡时,活塞的移动停止。
负载敏感控制在掘进机液压系统中的应用

负载敏感控制在掘进机液压系统中的应用作者:张世毅来源:《中国科技博览》2014年第01期[摘要]掘进机行走、油缸系统采用恒功率、压力切断、负载敏感单泵控制系统,其控制阀采用负载敏感比例多路换向阀。
行走回路为恒功率控制,实现行走快速调动、工进钻进;油缸回路为负载敏感控制,实现油缸升降、回转等动作。
[关键词]掘进机;恒功率;压力切断;负载敏感中图分类号:TD421.5 文献标识码:A 文章编号:1009-914X(2014)01-0000-010 概迹半煤巷道掘进机是煤矿采准巷道的掘进设备。
从20世纪70年代我国开始自行研制,至今已有30余年。
在这30余年中,在广大工程技术人员的努力下,我国自主研发的掘进机已经达到国际先进水平,并形成从小型掘进机到大型掘进机系列产品,从而提高了我国掘进机械化水平。
掘进机控制系统除切割部为电控外,其行走、装运、油缸各部均采用液压控制。
然而目前掘进机液压控制系统基本都采用恒流量系统或恒压系统,其能量损失大,导致系统发热较大,使其故障频发。
1 液压系统三种基本供油方式1.1 恒压系统(节流控制)(见图1)该系统由一定量泵1供油,通过供油节流口2对执行元件供油,多余的流量通过限压阀4旁通回油箱。
1.2 恒流量系统(见图2)该系统由一定量泵1供油,通过执行元件的流量由三通流量调节阀6决定。
三通流量调节阀阀芯的位置由可调节流口5处的控制压差AP确定。
多余的流量直接通过三通流量调节阀⑥中的通道返回油箱。
泵总是在执行元件的压力加上控制压差AP下工作。
图1 恒压系统图2 恒流量系统1.泵2.节流阀3.溢流阀4.限压阀5.节流阀6.调节阀1.3 变量泵系统(见图3)该系统使用1台变量泵,在可调节流口处产生的控制压差AP控制组合式压力/流量控制器,该控制器有作用于泵的调节装置。
于是,泵就调整到它只提供所需流量(执行元件所需流量+泄漏量),并且总是在执行元件加控制压差AP下工作。
与恒压系统比较,恒流量系统具有较少的压力损失,通往执行元件的流量越接近供油流量,损失越小。
挖掘机的液压控制系统解读

#$此外!这两种控制系统都能进行最大流量限制!系统的可靠性&稳定性&可维护性等都经过实践验证$总之!这两种控制系统各有优势!而各自的不足对整个控制系统没有多大影响!因此!这两种控制系统都得到了用户的认可$
图&两种控制系统操作过程与执行
机构动作的关系
!
责任编辑’贺彩宏"
挖掘机的液压控制系统
王成虎!尹志红
"宇通重工有限公司产品开发处!河南郑州&#" " #%#
!中图分类号" ’ (% *$#! !文献标识码" +!文章编号" %" " %, ##&-#! " " #$%%, " " . /, " %
! " #$%&’ ( *+, $*’ -" -, . /*0. 1 %2%, *$
W A #$%&’ ( &*! +, #-&. &/(0
现代液压挖掘机的液压控制系统主要是流量控制系统!流量控制系统分为节流控制和负荷传感控制!节流控制又分为负向流量控制和正向流量控制$目前!液压挖掘机上使用最多的是负向流量控制和负荷传感控制$使用负向流量控制的主机厂家主要有%大宇&詹阳&卡特&神钢&小松" 1%0#以及1%0#之前的机型#等!使用负荷传感控制的主机厂家主要有%日立&三一&小松" 1%01和1%0*机型#等$
负向流量控制中泵的流量!是随控制压力信号" #的
增大而减小的!控制压力信号"
#
挖掘机液压系统的流量控制方法研究

挖掘机液压系统的流量控制方法研究随着机械化水平和工程技术的不断提升,挖掘机已经成为了现代建筑中不可或缺的重要工具之一。
而在挖掘机的各个功能模块中,液压系统扮演着至关重要的角色。
液压系统可以通过传递压力和流量,驱动各种液压执行机构完成工作。
挖掘机液压系统的流量控制方法是该系统运转过程中的重要问题,对于提高挖掘机的工作效率和便利程度都有着不可或缺的作用。
一、挖掘机液压系统流量的控制方法1. 手动控制方法:这种方法是最为简单的一种控制方法,通常在早期的挖掘机中被广泛应用。
手动控制方法通常是由操纵杆操作,通过调整液压泵的容积,来控制液压系统的流量。
这种方法随着技术的不断提高,逐渐被机械控制、电子控制和比例控制所替代。
2. 机械控制方法:这种方法是在手动控制方法基础上的一种升级版,它采用了机械传动装置,采用相对刚性的机械传动来控制液压系统流量。
这种方法的好处是结构比较简单,易于维修和更换,但是无法实现流量自适应和流量调节。
3. 电子控制方法:随着计算机技术和传感器技术的不断发展,电子控制方法逐渐被广泛应用。
电子控制方法通过传感器对流量和压力进行在线监测,然后通过计算机控制来实现液压系统流量的控制。
这种方法的好处是可以实现流量自适应和流量调节,但是相对于机械控制方法来说,电子控制方法的成本和维护难度都比较大。
4. 比例控制方法:比例控制方法又称为比例液压控制技术,是一种结合了机械传动和电子技术的先进液压控制方法。
比例控制方法利用比例电磁阀来控制节流元件的开度,从而实现流量的调节控制。
这种方法的优势在于既可以兼顾机械控制的稳定性和简单性,同时也可以实现电子控制的流量自适应和流量调节。
二、挖掘机液压系统的流量控制应用实例1. 挖掘机工作如果不能精确地控制油液流量,很难保证机械的工作效率和精度。
通过采用比例控制方法,可以精确地控制挖机的液压系统流量,从而保证机械的工作效率和精确度。
2. 在矿山和采石场等大型场景下,挖掘机的工作时间比较长,如果采用手动控制或者机械控制方法容易造成工人疲劳和系统失灵。
液压挖掘机的三种流量控制方式

液压挖掘机的三种流量控制方式摘要:在液压挖掘机的负载适应控制策略中,负流量(Negative Flow Control)、正流量控制(Positive Flow Control)及负荷传感器控制(Load Sensing Control)三种流量控制方式的流行称谓,是按其泵控特性来分类的。
本文通过对多种厂牌型号挖掘机的比较分析,提出了旁通流量控制(By-pass Flow Control)、先导传感控制(Pilot Sensing Control)及负荷传感控制的分类。
这一分类方法,对于设计时比较不同控制系统的性能和维修时理解不同控制系统结构和功能的特点,都有所裨益。
1.流量控制在挖掘机的液压系统内,流量Q、压力P及能耗(流量损失ΔQ、压力损失ΔP)等参数的变化,反映了液压传动过程的控制特性。
液压系统工作时,压力P不是系统的固有参数,而是由外负荷决定的。
因此,当发动机转速n e一定时,要对液压系统的功率进行调节,其实是对液压缸、液压马达等执行元件的进油量Q a进行调节(参看图1)。
图1.流量调节如图2所示,有两种方法调节系统流量。
第一种方法是泵控方式,通过改变主泵的每转排量q来调节主泵的输出流量Q p,称为容积调速。
常见的容积调速方式包括:①利用主泵出口压力P P与主泵排量q的乘积保持不变的恒扭矩控制;②利用发动机转速传感(ESS)使主泵吸收的扭矩p P q与主泵转速n的乘积保持不变的恒功率控制;③在临近系统溢流压力时,减小主泵排量的压力切断控制;④配用破碎头等作业附件时,由外部指令限定主泵最大排量的最大流量二段控制;⑤双泵系统中,利用两泵出口压力的平均值与主泵流量乘积保持不变的交叉功率控制(相加控制或总功率控制);⑥多泵系统中,因主泵组的液压总功率大于发动机的输出功率,为防止发动机出现失速,采用了极限负荷控制。
除了容积调速,还有一种泵控方式是通过动力模式下的变功率控制,利用外部指令设定不同工况下不同的发动机输出功率来改变主泵转速n e,从而调节主泵输出流量Q=nq。
1负流量控制国产中型挖掘机主泵总成(川崎K3V112DT)结构原理分析
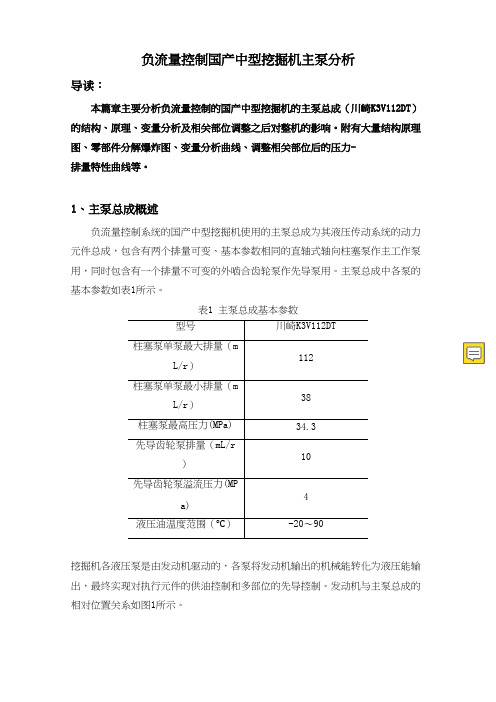
负流量控制国产中型挖掘机主泵分析导读:本篇章主要分析负流量控制的国产中型挖掘机的主泵总成(川崎K3V112DT)的结构、原理、变量分析及相关部位调整之后对整机的影响。
附有大量结构原理图、零部件分解爆炸图、变量分析曲线、调整相关部位后的压力-排量特性曲线等。
1、主泵总成概述负流量控制系统的国产中型挖掘机使用的主泵总成为其液压传动系统的动力元件总成,包含有两个排量可变、基本参数相同的直轴式轴向柱塞泵作主工作泵用,同时包含有一个排量不可变的外啮合齿轮泵作先导泵用。
主泵总成中各泵的基本参数如表1所示。
表1 主泵总成基本参数型号川崎K3V112DT柱塞泵单泵最大排量(m112L/r)柱塞泵单泵最小排量(m38L/r)柱塞泵最高压力(MPa)34.3先导齿轮泵排量(mL/r10)先导齿轮泵溢流压力(MP4a)液压油温度范围(℃)-20~90挖掘机各液压泵是由发动机驱动的,各泵将发动机输出的机械能转化为液压能输出,最终实现对执行元件的供油控制和多部位的先导控制。
发动机与主泵总成的相对位置关系如图1所示。
1-发动机;2-主泵总成图1 发动机与主泵总成相对位置负流量控制的国产中型挖掘机使用了川崎K3V112DT型主泵,该主泵总成内各泵实际为串联,即发动机输出的机械能通过一根输出轴(实际为两根,通过花键套串联),将动力传输与各泵,故该主泵总成被称为串联式多泵。
对于该型主泵,从外部看,如图2所示,该主泵总成由两个主工作泵(双柱塞泵)泵体、先导齿轮泵、主泵调节器和比例电磁阀(也称PSV阀或电磁比例减压阀)阀块等组成。
1-主工作泵(双柱塞泵);2-先导齿轮泵;3-主泵调节器;4-比例电磁阀阀块图2 主泵总成基本组成结构图如图3所示,对于该型主泵总成,是由两个直轴式轴向柱塞泵及一个外啮合齿轮泵串联而成。
其中,靠近发动机侧的柱塞泵被称为前泵(或左泵、P1泵),另一柱塞泵被称为后泵(或右泵、P2泵)。
1-前泵;2-中间体;3-后泵;4-先导泵;5-前泵调节器;6-后泵调节器(前泵输出的油液可流经左行走、回转、动臂2(动臂副联)及斗杆1(斗杆主联)的主换向阀芯,后泵输出的油液可流经右行走、备用(破碎锤或液压剪等)、动臂1(动臂主联)、铲斗及斗杆2(斗杆副联)的主换向阀芯)图3 主泵总成各部件位置及名称对于前泵与后泵,每个泵均由泵体、输入轴、缸体、(九个带滑靴结构的)柱塞、配流盘、斜盘、伺服活塞及对应泵调节器等组成,柱塞头部(即滑靴表面)紧贴斜盘表面。
挖掘机负载敏感系统介绍(中文)

并能防止液压执行机构产生停滞。
LUDV功能
中位
(1)行程限制块(2)二次压力释放/防蚀阀(3)负载保持阀(4) LUDV压力补偿阀(5)先导梭阀
(6)控制阀杆(7)输入测流口pA (8)输入测流口pB (9)输出测流口BT (10)输出测流口AT
这个LUDV部件压力补偿阀安排在控制阀芯测流口的下游,它包含有一个控制阀芯(13)和一个能限定稳固初始位置的微压缩弹簧(14)。
独立操纵或最高负载执行机构
先导控制装置的先导压力使得控制阀芯(6)克服弹簧力相应按比例的移动。这个图中,A口的先导压力推着阀芯克服B侧控制盖内的弹簧力向右移动。控制阀芯的测流输入节流口(7)打开了从泵来的P口与P‘通道的连接。该压力使得压力补偿阀(13)打开并且被施加到单向阀(3)上。
在LUDV系统中,所有执行机构部分的p测流节流口总相同。但不是一个恒定值。根据非饱和状态的程度,它可能在设定值pLS控制器和大约2 bar的压力之间变化(见表:p依赖需求的流量),在这个范围内,LUDV系统按比例相应地分配流量。
由于这个原因,即使在非饱和状态下,LUDV系统内负载压力最高的执行机构也将不会陷入停顿状态,所有使用中的执行机构的速度根据ቤተ መጻሕፍቲ ባይዱ启的通流面积按比例减小。
说明:不同负载压力情况下的压力补偿阀的功能
如果在非饱和状态范围内的同步动作中,执行机构的速度减小,也就是测流节流口关闭,非饱和程度减少,如果其它的仍还起作用的部件的p测流节流口增加,执行机构动作速度的也就相应增加。
给机器的指令控制信号由液压或电子的控制装置动作产生,并立即响应。
工程机械液压传动系统形式—变量泵的控制方式

功
率
曲
线
P有一个最大值,为溢流阀预设
定的压力值
Q有一个最大值,为液压泵最大
流量值
任一点的功率(N=PQ)始终不
变(恒功率)
2. 液压泵功率控制曲线
双
泵
合
流
总功率等于分泵功率之和
分泵可以单独控制,也可以互控
有总功率变量和分功率变量两种形式
3. 总功率控制
3.1 总功率控制目的
• 负荷传感压力Pls为系统的最高
负荷,由梭阀链选取
2. 负荷传感(LS)控制工作原理
• 主控阀为中位常闭
•
•
•
•
•
•
•
•
Q=KA√∆ ,∆=Pp-Pls
LS阀阀芯受力情况
液压泵输出压力Pp
负荷传感压力Pls
弹簧力Pk
Pk=ΔP=Pp-Pls
调节弹簧预压力Pk,可调整ΔP
一般取ΔP=2.2MPa左右
压力增大而增大,呈正比关
系
• 先导控制压力P↑,则输出流
量↑
第36页
2. 正流量控制信号采样点
• 先导控制压力Pi采用操纵阀
的先导控制阀油压
• 先导泵输出液压油经先导阀
输出后,一部分去控制主阀,
另一部分用来控制液压泵变
量机构
• 先导控制压力Pi为各先导油
中的最高压力
第37页
3. 正流量控制工作原理
Pk=ΔP=Pp-Pls
②主控阀动作
如果主控阀开度变大
动态∆P减小
LS阀阀芯左移活塞右移
排量增大
2. 负荷传感(LS)控制工作原理
•
•
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
负流量控制器的控制目标
NRff 节流口前的旁路回油压力检测值 Kff 实际旁路回油压力与设定值之间误差 Lff 采样序号 YZ[\ff 由负流量 &GH控制器算出的泵排量 ]^@]‘@]<ff &GH 控 制 器 的 比 例@积 分 和
微分常数
Y‘ff 积分饱和上限 Uff 误差死区设定值 为 实 现 负 流 量 负 荷 传 感 控 制 3需 要 在 式 7!8的 基 础上动态设定旁路回油压力3使 N5O5P总比最大负载 压力高出一个小的固定值7例如 WghP&/83如
V d
N5O5P Q NR7L8 7K7L8S TUT8
K7L8M
W
7K7L8X TUT8
L
a cYZ[\7L8M
]^K7பைடு நூலகம்8_
]‘ K7b8_
bM W
7!8
]<9K7L8Q K7LQ !8;
LQ !
e
a 7Q Y‘X K7b8X Y‘8
bM W
式中 N5O5P ff 旁路回油节流口处压力设定 值3是
! 传统负流量控制分析
传统的液压挖掘机负流量控制系统原理可简化
为图 /所示 形式*六 通多路 阀 可 简 化 为 0"#"$ 等 % 个联动的可变节流口+由于负流量控制在本质上是 一 种恒流 量控制 系 统*通 过 在 多 路 阀 旁 路 回 油 通 路 上 设 置 流 量 检 测 元 件 R如 图 /中 所 示 的 节 流 口 a*控 制旁路回油流量为恒定值+根据图 /*通过节流口的 流 量与 节流口 前 的 压 力 有 关*因 此 恒 流 量 控 制 就 可 以转化 为恒 压力 控 制*压 力 检 测 点 位 于 多 路 阀 旁 路 回油口 $ 和流量检测节 流口之 间的 % 点*即控 制 % 点的压力为恒定值+
始 终比负载压力 高3在 任 何 情 况 下 都 能 使 系 统 保 持
较 好 的 调 速 性 3这 就 是 负 流 量 负 荷 传 感 控 制 原 理 6
将
负
流量负荷 万方数据
传
感
控
制
原
理
应
用
于
挖
掘
机 3其
液压系统原理如图 :所示6系统由电液比例泵@六通
图 : 负流量负荷传感控制结构图 "#$%: A0’B)0B’,-.(,$/0#1,+-/CD,(D#($)-(0’-+DED0,F
用于一台试验型液压挖掘机器人上+控制策略的 原 理 是 在 负 流 量 控 制 的 基 础 上*使 旁 路 回 油 设 定 压 力 随 外 负 载 的
变 化 而 变 化 *在 减 小 多 路 阀 旁 路 回 油 节 流 损 失 的 同 时 *提 高 了 系 统 的 操 纵 性 + 应 用 结 果 表 明 *效 果 良 好 +
载 的变化而变化 #最大 负 载 压 力 和 旁 路 回 油 压 力 试 验 曲 线 几 乎 重 合$%因 此 工 作 油 口 上 的 压 力 损 失 较 小 %而 旁 路 回 油 节 流 口 上 的 压 力 损 失 也 大 大 减 小 ’从 图 "中 还 可 以 看 出%负 流 量 负 荷 传 感 系 统 的 工 作 压 力比传统负流量 控 制 系 统 低 得 多%而 且 完 成 同 样 的 工 作时泵排量也较小 #两 图 中 的 数 据 都 是 在 泵 转 速 为 DDEE5F8/7下测得$%说 明 负 流 量 负 荷 传 感 控 制 具有更好的节能性’
负 流 量 控 制 系 统 也 具 有 一 定 的 调 速 性*此 时 阀 心位于微调区*多路阀的0 口"$口都处在打开的状 态*使泵输出的流量一部分通过0 口进入液压缸*一 部分通过 $口和流量检测节流口流回油箱+在这一 过程中*如果控制% 点压力不变*使通过$口的流量
收稿日期,!""{ "! !$ ’ 国家q|&%r高技术研究发展计划资助项目R项目编号,!""/00{!!/%"a 高 峰 浙江大学机械设计研究所 博士后*%/""!$ 杭州市
第 )期
高峰 等Z液压挖掘机负流量负荷传感控制策略
JJ"
! 试验分析
图 "为挖掘机器人作三角形轨迹的伺服控制时 #循 环 两 次 $%用 来 控 制 回 转 &斗 杆 的 多 路 阀 旁 路 回 油 压 力&泵输 出 压 力&最 大 负 载 压 力&泵 排 量 随 时 间 的 变 化 情况%数据由控制系统 计 算 机 记 录 得 到’ 图 "( 中 %为 保 证 伺 服 系 统 进 行 正 常 的 轨 迹 跟 踪 %旁 路 回 油 压 力 设定在较高的 )*+(%以 便 能 比 较 容 易 地 克 服 负 载 #压 力 过 低 将 严 重 影 响 系 统 响 应$,图 "-中%旁
!%动臂油缸 :%铲斗油缸
多 路 阀 7用 电 液 比 例 先 导 控 制 8@梭 阀 组 成 3采 用 计 算 机控 制 技 术 和 数 字 &GH控 制 策 略9I;3在 一 台 试 验 型 挖掘机器人 上 9J; 对这种控制策略进行了试验6其中3 梭阀 组的作 用是 取 得 系 统 最 高 负 载 压 力3并 将 其 送 往控制器6其中的负流量控制算法为
应 速 度 加 快 6在 负 流 量 控 制 中 3泵 输 出 压 力 始 终 高 于
旁 路 回 油 压 力 3因 此 3旁 路 回 油 压 力 的 改 变 也 将 引 起
泵 输 出 压 力 的 改 变 6利 用 这 种 特 性 3如 果 控 制 旁 路 回
油 压力始终比负 载 压 力 高 一 点3就 能 使 泵 输 出 压 力
!""#年 $月
农业机械学报
第 %&卷 第 $期
&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
液压挖掘机负流量负荷传感控制策略’
高 峰 潘双夏
(摘 要) 针 对 目 前 液 压 挖 掘 机 上 常 用 的 负 流 量 控 制 系 统 的 不 足*提 出 了 一 种 负 流 量 负 荷 传 感 控 制 策 略*并 应
关键词,液压式挖掘机 负流量控制 控制方法
中 图 分 类 号 ,-.&!/
文 献 标 识 码 ,0
1 2345647894:;9<2=5:3> 9?@37A:6B3C9AD
EFGHIJK LFJMNOFJKPQF RSTUVWXYZ[YW\U]^W_‘a
1b5:;Ac:
-NIdeQJfQdgIFJhiNGejFKIGkFJIKFjQlIfGJjeGgimijIn*oNQfNQioQhIgmOiIhQJNmheFOgQf IPfFlFjGeFjdeIiIJj*oIeIFJFgmpIh*FJhFJIo nIjNGhfFggIhqJIKFjQlIgGFhiIJiQJKfGJjeGg imijInroFideGdGiIhs-NQiimijIn oFiiOffIiikOggmOiIhQJFJIPdIeQnIJjFgIPfFlFjQJKeGtGjs -NIdeQJfQdgIGkjNQinIjNGhQitFiIhGJjNIfGnnGJJIKFjQlIkgGo fGJjeGgimijIn*FJhQjitmdFii deIiiOeIGkjNIlFglIQifGJjeGggIhFffGehQJKjGjNInFPgGFhdeIiiOeIGkjNIfmgQJhIeisuQjNjNQi nIjNGh*jNIdeIiiOeIeIhOfjQGJGklFglInIjIeQJKoFieIhOfIhFJhjNIfGJjeGggFtQgQjmGkimijIn oFiQndeGlIhs
因 此 3在 传 统 的 负 流 量 控 制 中 3节 能 性 与 操 纵 性 之间的矛盾难以协调6
? 负流量负荷传感控制原理
在 六 通 多 路 阀 中3负 载 对 阀 口 流 量 特 性 的 影 响
是 由 系 统 的 起 始 压 力 低 于 负 载 压 力 引 起 的 6此 时 3在
图 !中 的 单 向 阀 的 作 用 下3泵 输 出 的 液 压 油 全 部 通
图 G(&-分 别 为 挖 掘 机 器 人 在 传 统 负 流 量 控 制 和负流量负荷传 感 控 制 下%作 三 角 形 轨 迹 跟 踪 的 效 果 ’从 图 中 可 以 看 出 %两 种 系 统 都 能 满 足 伺 服 控 制 的 需 要 %伺 服 控 制 跟 踪 轨 迹 几 乎 一 样 %说 明 负 流 量 负 荷 传感系统将节能性和操纵性较好地结合在一起’
^5O5PMF/i7N!!3N!:3N:!3N::8_Wgh 7:8 式中 N!!@N!:@N:!@N::ff 液压缸各腔的负载压力
可以通过图 :中的梭阀组将其中的最大压力引 出6
将 式7!8和式7:8结 合 起 来3就 构 成 了 负 流 量 负 荷 传 感 控 制 策 略 6由 于 挖 掘 机 器 人 在 作 伺 服 控 制 时 3 对系 统响应 速度 要 求 较 高3而 负 流 量 负 荷 传 感 控 制 恰 好 能 满 足 这 种 要 求 3而 且 受 负 载 影 响 不 大 3同 时 又 保持了负流量控制的节能性6