控制系统仿真实训
dcs实训报告2000字
dcs实训报告2000字摘要DCS(Distributed Control System),即分布式控制系统,是一种工业领域中常见的控制系统,它可以实现高效的过程控制。
因此,DCS的使用越来越普遍。
本文首先介绍了DCS应用的基本原理,然后介绍了如何在DCS系统中实现控制算法,最后介绍了本人在DCS系统实训中进行的相关实验。
结果表明,DCS系统能够实现精确的控制任务,整体控制效果良好。
关键词:DCS,原理,实验,控制1、DCS系统的基本原理DCs系统是分布式控制系统的简称,是工业领域中主要应用的系统之一。
DCs系统可以实现现场设备数据的采集、处理、控制等功能。
在分布式控制系统中,具有可控设备的控制现场控制现场被分布式分为多个控制系统,其中每个控制系统都由一个控制器和其相关的设备构成,各种控制器之间依靠网络连接,实现了分布式控制系统的功能的实现。
当DCS系统设置好参数后,就可以实现控制功能了,它可以根据过程变量及设定了的控制算法,实现现场设备的自动控制和监控,实现精确的过程控制,提高了控制的准确性和可靠性。
2、DCS系统中控制算法的实现DCS系统是以设备和控制算法为基础的,通过控制算法来实现自动化控制,因而在实际应用中控制算法的选择是十分重要的,有一定的计算复杂度和计算负荷要求。
控制系统中可以使用常见的算法来实现控制,如PID(比例-积分-微分)控制和状态反馈控制,这些控制算法都能够实现更精确的控制,控制精度更高,且可以根据实际的需求进行修改。
3、DCS系统实训实验为了更好的了解DCS系统,本人在大学实习期间进行了DCS系统的实训实验。
实验中使用了瑞普特(Riptise)DCS系统,通过实验,可以有效地说明DCS系统的基本原理以及实现技术。
首先,根据实验要求,按照实验指导书的指示进行系统构建,实现过程控制系统的建立。
其次,在实验中,使用Riptise仿真工具,实现流程控制系统的仿真,并进行实验,以确定该系统的建立是否正确。
控制工程实训课程学习总结基于MATLAB的系统建模与仿真实验报告
控制工程实训课程学习总结基于MATLAB 的系统建模与仿真实验报告摘要:本报告以控制工程实训课程学习为背景,基于MATLAB软件进行系统建模与仿真实验。
通过对实验过程的总结,详细阐述了系统建模与仿真的步骤及关键技巧,并结合实际案例进行了实验验证。
本次实训课程的学习使我深入理解了控制工程的基础理论,并掌握了利用MATLAB进行系统建模与仿真的方法。
1. 引言控制工程是一门应用广泛的学科,具有重要的理论和实践意义。
在控制工程实训课程中,学生通过实验来加深对控制系统的理解,并运用所学知识进行系统建模与仿真。
本次实训课程主要基于MATLAB软件进行,本文将对实验过程进行总结与报告。
2. 系统建模与仿真步骤2.1 确定系统模型在进行系统建模与仿真实验之前,首先需要确定系统的数学模型。
根据实际问题,可以选择线性或非线性模型,并利用控制理论进行建模。
在这个步骤中,需要深入理解系统的特性与工作原理,并将其用数学方程表示出来。
2.2 参数识别与估计参数识别与估计是系统建模的关键,它的准确性直接影响到后续仿真结果的可靠性。
通过实际实验数据,利用系统辨识方法对系统的未知参数进行估计。
在MATLAB中,可以使用系统辨识工具包来进行参数辨识。
2.3 选择仿真方法系统建模与仿真中,需要选择合适的仿真方法。
在部分情况下,可以使用传统的数值积分方法进行仿真;而在其他复杂的系统中,可以采用基于物理原理的仿真方法,如基于有限元法或多体动力学仿真等。
2.4 仿真结果分析仿真结果的分析能够直观地反映系统的动态响应特性。
在仿真过程中,需对系统的稳态误差、动态响应、鲁棒性等进行综合分析与评价。
通过与理论期望值的比较,可以对系统的性能进行评估,并进行进一步的优化设计。
3. 实验案例及仿真验证以PID控制器为例,说明系统建模与仿真的步骤。
首先,根据PID控制器的原理以及被控对象的特性,建立数学模型。
然后,通过实际实验数据对PID参数进行辨识和估计。
自动控制原理实训报告

自动控制原理实训报告引言:自动控制原理是现代工程领域中的重要学科,它研究如何利用控制系统来实现对各种物理过程的自动化调节和控制。
本篇报告旨在总结和分析我在自动控制原理实训中所学到的知识和经验,并对实训过程中遇到的问题进行探讨和解决。
一、实训目的和背景自动控制原理实训的主要目的是通过实际操作和实验验证,加深对自动控制原理的理解和掌握。
通过实际操控控制系统,我们可以更好地理解控制系统的工作原理、参数调节和性能评估等方面的知识。
二、实训内容和步骤本次实训主要包括以下内容和步骤:1. 实验仪器和设备的介绍:我们首先了解了实验室中常用的控制系统实验仪器和设备,包括传感器、执行器、控制器等,并学习了它们的基本原理和使用方法。
2. 控制系统的建模与仿真:我们学习了如何将实际的物理过程建立数学模型,并利用仿真软件进行系统性能分析和优化设计。
3. PID控制器的调节:PID控制器是最常用的控制器之一,我们学习了PID控制器的原理和调节方法,并通过实验验证了不同参数对系统响应的影响。
4. 系统性能评估与优化:我们学习了如何评估控制系统的性能指标,如稳定性、快速性和抗干扰能力,并通过调节控制器参数来优化系统性能。
三、实训中遇到的问题及解决方法在实训过程中,我们遇到了一些问题,下面列举了其中的几个,并给出了解决方法:1. 问题一:系统响应不稳定。
解决方法:通过调节PID控制器的参数,如比例系数、积分时间和微分时间,来使系统响应稳定。
2. 问题二:系统响应过慢。
解决方法:增大比例系数和减小积分时间可以提高系统的响应速度。
3. 问题三:系统受到干扰时响应不稳定。
解决方法:通过增加微分时间和加入滤波器等方法,可以提高系统的抗干扰能力。
四、实训心得和体会通过这次自动控制原理实训,我深刻体会到了理论与实践的结合的重要性。
在实际操作中,我们不仅需要理解控制原理,还需要灵活运用所学知识解决实际问题。
此外,实训过程中的团队合作也是非常重要的,通过与同学们的合作,我们共同解决了许多实际问题,加深了对自动控制原理的理解。
基于组态软件的PLC仿真实训教学项目设计
• 70•系统架构如图1所示,系统由计算机与PLC 组成,计算机上安装PLC 编程软件和组态王6.5。
PLC 仿真实训系统通过组态王软件实现界面的开发与设计,通过与PLC 进行通讯,真实地仿真控制工艺流程。
计算机也作为编程计算机,将编写的梯形图程序烧写进PLC 设备。
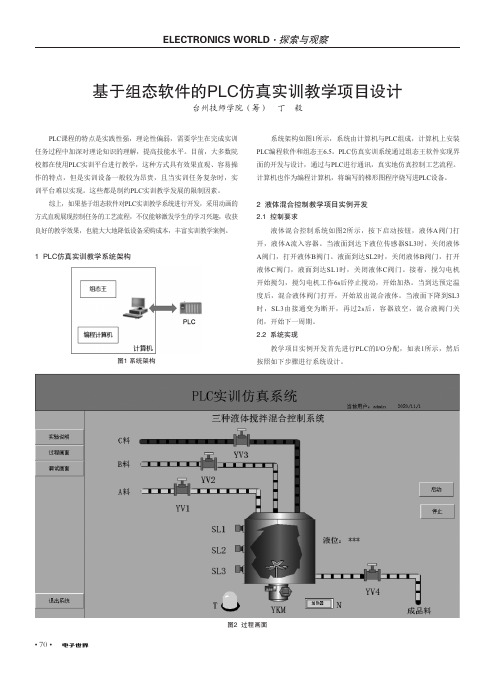
2 液体混合控制教学项目实例开发2.1 控制要求液体混合控制系统如图2所示,按下启动按钮,液体A 阀门打开,液体A 流入容器。
当液面到达下液位传感器SL3时,关闭液体A 阀门,打开液体B 阀门。
液面到达SL2时,关闭液体B 阀门,打开液体C 阀门,液面到达SL1时,关闭液体C 阀门。
接着,搅匀电机开始搅匀,搅匀电机工作6s 后停止搅动,开始加热。
当到达预定温度后,混合液体阀门打开,开始放出混合液体。
当液面下降到SL3时,SL3由接通变为断开,再过2s 后,容器放空,混合液阀门关闭,开始下一周期。
2.2 系统实现教学项目实例开发首先进行PLC 的I/O 分配,如表1所示,然后按照如下步骤进行系统设计。
基于组态软件的PLC仿真实训教学项目设计台州技师学院(筹) 丁 毅图2 过程画面PLC 课程的特点是实践性强,理论性偏弱,需要学生在完成实训任务过程中加深对理论知识的理解,提高技能水平。
目前,大多数院校都在使用PLC 实训平台进行教学,这种方式具有效果直观、容易操作的特点,但是实训设备一般较为昂贵,且当实训任务复杂时,实训平台难以实现。
这些都是制约PLC 实训教学发展的限制因素。
综上,如果基于组态软件对PLC 实训教学系统进行开发,采用动画的方式直观展现控制任务的工艺流程,不仅能够激发学生的学习兴趣,收获良好的教学效果,也能大大地降低设备采购成本,丰富实训教学案例。
1 PLC仿真实训教学系统架构图1 系统架构• 71•表1 PLC的I/O分配创建工程,完成画面设计。
本系统的过程画面如图2所示,直观展示了液体混合控制系统的工艺流程,包含了储液罐、管道,搅拌器等图形元素的绘制,所需元件可以通过图库进行添加。
控制系统实训实验报告

一、实验目的1. 了解控制系统的基本组成和原理。
2. 掌握控制系统调试和性能测试方法。
3. 培养动手能力和团队协作精神。
4. 熟悉相关实验设备和软件的使用。
二、实验原理控制系统是指通过某种方式对某个系统进行控制,使其按照预定的要求进行运行。
控制系统主要由控制器、被控对象和反馈环节组成。
控制器根据被控对象的输出信号,通过调节输入信号,实现对被控对象的控制。
本实验主要研究PID控制系统的原理和应用。
三、实验仪器与设备1. 实验箱:用于搭建控制系统实验电路。
2. 数据采集卡:用于采集实验数据。
3. 计算机:用于运行实验软件和数据处理。
4. 实验软件:用于控制系统仿真和调试。
四、实验内容1. 控制系统搭建:根据实验要求,搭建PID控制系统实验电路,包括控制器、被控对象和反馈环节。
2. 控制系统调试:对搭建好的控制系统进行调试,包括控制器参数的整定、系统稳定性和响应速度的调整等。
3. 控制系统性能测试:对调试好的控制系统进行性能测试,包括系统稳定性、响应速度、超调量等指标。
4. 控制系统仿真:利用实验软件对控制系统进行仿真,分析系统在不同参数下的性能。
五、实验步骤1. 控制系统搭建:按照实验要求,连接控制器、被控对象和反馈环节,搭建PID控制系统实验电路。
2. 控制系统调试:根据实验要求,调整控制器参数,使系统达到预定的性能指标。
3. 控制系统性能测试:对调试好的控制系统进行性能测试,记录测试数据。
4. 控制系统仿真:利用实验软件对控制系统进行仿真,分析系统在不同参数下的性能。
六、实验结果与分析1. 控制系统搭建:成功搭建了PID控制系统实验电路。
2. 控制系统调试:通过调整控制器参数,使系统达到预定的性能指标。
3. 控制系统性能测试:系统稳定性、响应速度、超调量等指标均达到预期效果。
4. 控制系统仿真:仿真结果表明,系统在不同参数下具有良好的性能。
七、实验总结1. 通过本次实验,了解了控制系统的基本组成和原理。
智能化控制系统综合实训报告

智能化控制系统综合实训报告一、实验目的本次实验的主要目的是让学生掌握智能化控制系统的原理和应用,熟悉智能化控制系统的工作流程,实现相关系统的实验项目。
二、实验器材1、PLC控制器2、触摸屏3、电机4、气缸5、传感器6、连接线等。
三、实验要求1、了解智能化控制系统的应用范围和功能;2、熟悉控制系统的原理和工作流程;3、了解控制系统的结构和组成;4、掌握智能化控制系统的编程方法;5、掌握系统的故障检测和维修方法。
四、实验内容1、PLC控制器的组装和连接2、编写PLC程序3、安装触摸屏4、测试硬件是否正常5、运行程序6、故障检测和维修五、实验步骤1、按照图纸拼装PLC控制器,在电源板上连接好电源线和控制线。
按照需求编写控制程序,使用Ladder语言进行编程,根据需要添加相关的指令和运算符,并将程序下载到控制器中。
选择适当的触摸屏,在控制器旁边进行安装,按照规定连接线路,保证触摸屏和PLC之间可以正常通信。
启动控制器,运行程序,通过触摸屏对程序进行调试和检测,检查各种设备是否可以正常运行。
经过以上步骤后,进行程序调试并启动,验证系统是否可以正常工作。
进行系统测试,看是否能够实现我们预定的功能。
在系统出现故障时,可通过PLC控制器的错误代码进行故障检测,找到故障原因并解决,保证系统的正常运行。
六、实验效果本次实验我们成功地搭建了一个智能化控制系统,并且通过编写PLC程序实现了各种功能,并且能够通过触摸屏进行调试和监管。
实验展示了智能化控制系统的原理和应用,学生也掌握了智能化控制系统的搭建方法、编程方法、故障检测和维修方法。
通过本次实践,学生有更深入的了解智能化控制系统的使用,一方面提高了学生的实际操作能力,另一方面拓展了学生的思维视野,为将来的研究和工作打下了坚实的基础。
催化裂化dcs集散控制系统仿真模拟实训和常减压装置仿真系统模拟

催化裂化dcs集散控制系统仿真模拟实训和常减压装
置仿真系统模拟
催化裂化DCS集散控制系统仿真模拟实训和常减压装置仿真系统模拟
催化裂化DCS集散控制系统是石油化工行业中的重要设备之一,它可以实现对催化裂化装置的自动化控制,提高生产效率和产品质量。
为了提高操作人员的技能水平和应对突发情况的能力,许多企业都会开展催化裂化DCS集散控制系统仿真模拟实训。
在这种实训中,操作人员可以通过模拟真实的生产场景,学习催化裂化DCS集散控制系统的操作流程和应对突发情况的方法。
通过实际操作,他们可以更好地理解催化裂化DCS集散控制系统的工作原理和控制策略,提高自己的技能水平。
除了催化裂化DCS集散控制系统仿真模拟实训,常减压装置仿真系统模拟也是石油化工行业中的重要实训内容。
常减压装置是炼油厂中的重要设备之一,它可以将原油分解成不同的组分,提高产品的质量和产量。
在常减压装置仿真系统模拟中,操作人员可以通过模拟真实的生产场景,学习常减压装置的操作流程和应对突发情况的方法。
通过实际操
作,他们可以更好地理解常减压装置的工作原理和控制策略,提高自己的技能水平。
总之,催化裂化DCS集散控制系统仿真模拟实训和常减压装置仿真系统模拟是石油化工行业中非常重要的实训内容。
通过这些实训,操作人员可以更好地掌握设备的操作流程和应对突发情况的方法,提高自己的技能水平,为企业的发展做出更大的贡献。
自动控制系统实训总结

自动控制系统实训总结自动控制系统是现代工业生产中不可或缺的一部分,它可以实现对生产过程的自动化控制,提高生产效率和产品质量。
为了更好地掌握自动控制系统的原理和应用,我们在学习过程中进行了一系列的实训。
一、实训内容本次实训内容主要包括以下几个方面:1. PLC编程实训:学习PLC的基本原理和编程方法,掌握PLC的输入输出模块的使用方法,实现对生产过程的自动化控制。
2. 传感器实训:学习传感器的种类和原理,掌握传感器的安装和调试方法,实现对生产过程中各种参数的监测和控制。
3. 电机控制实训:学习电机的种类和原理,掌握电机的控制方法,实现对生产过程中电机的启停和转速控制。
4. 自动化生产线实训:学习自动化生产线的组成和原理,掌握自动化生产线的调试和运行方法,实现对生产过程的全面自动化控制。
二、实训过程在实训过程中,我们首先学习了PLC的基本原理和编程方法,掌握了PLC的输入输出模块的使用方法。
然后,我们进行了传感器实训,学习了传感器的种类和原理,掌握了传感器的安装和调试方法。
接着,我们进行了电机控制实训,学习了电机的种类和原理,掌握了电机的控制方法。
最后,我们进行了自动化生产线实训,学习了自动化生产线的组成和原理,掌握了自动化生产线的调试和运行方法。
在实训过程中,我们遇到了许多问题,但是通过老师的指导和同学们的合作,我们最终都成功地解决了这些问题。
在实训过程中,我们不仅学到了理论知识,还掌握了实际操作技能,这对我们今后的工作和学习都有很大的帮助。
三、实训收获通过本次实训,我们收获了很多。
首先,我们深入了解了自动控制系统的原理和应用,掌握了PLC编程、传感器调试、电机控制和自动化生产线调试等技能。
其次,我们学会了团队合作和沟通交流,这对我们今后的工作和学习都非常重要。
最后,我们也意识到了自己的不足之处,知道了自己需要进一步提高的方面。
四、实训建议在实训过程中,我们也发现了一些问题。
首先,实训时间较短,有些内容没有完全掌握。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《控制系统仿真课程设计》报告题目:控制系统仿真实训专业:自动化班级:本自动化124班姓名:冯伶俐指导老师:李颖琼实训一 熟悉MATLAB 集成环境与基础运算1.先求下列表达式的值,然后显示MATLAB 工作空间的使用情况并保存变量。
122sin851z e =+>> z1 = (2*sin(pi*85/180))/(1+exp(2)) z1 =0.23752.已知 1234413134787,2033657327A B --⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦,求下列表达式的值: ● A+6*B 和A-B+I (其中I 为单位矩阵)ans =18 52 -10 46 7 105 21 53 49 ans =12 31 -3 32 8 84 0 67 1 ● A*B 和A.*Bans =68 44 62 309 -72 596 154 -5 241 ans =12 102 4 68 0 261 9 -130 49● A^3和A.^3ans =37226 233824 48604 247370 149188 600766 78688 454142 118820 ans =1728 39304 -64 39304 343 658503 27 274625 343 ● A/B 及B\A ans =16.4000 -13.6000 7.6000 35.8000 -76.2000 50.2000 67.0000 -134.0000 68.0000 ans =109.4000 -131.2000 322.8000 -53.0000 85.0000 -171.0000 -61.6000 89.8000 -186.2000 3.设有矩阵A 和B1234530166789101769A ,111213141502341617181920970212223242541311B ⎡⎤⎡⎤⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦(1) 求它们的乘积C ;>> A = [1,2,3,4,5; 6,7,8,9,10; 11,12,13,14,15; 16,17,18,19,20; 21,22,23,24,25]; B = [3,0,16; 17,-6,9; 0,23,-4; 9,7,0;4,13,11];C = A*BC =93 150 77258 335 237423 520 397588 705 557753 890 717(2)将矩阵C的右下角3*2子矩阵赋给D;>> E = [3,4,5];F = [2,3];D = C(E,F)D =520 397705 557890 717(3)保存变量(mat文件)save D.mat实训二 MATLAB 编程基础1. 求[100,999]之间能被21整除的数的个数。
>> i=100:999; j=find(mod(i,21)==0); length(j) ans = 432. 利用randn 函数产生均值为0,方差为1的6×6正态分布随机矩阵C ,然后统计A 中大于-0.3,小于0.3的元素个数t 。
(find 语句)。
3.根据222221 (3121116)n ++++=π,求π的近似值。
当n 分别取100、1000、10000时,结果是多少?4.有一分数序列:⋅⋅⋅ ,1321,813 ,58 ,35 ,23 ,21编写一段程序,求前16项的和。
5.已知:⎪⎪⎩⎪⎪⎨⎧>===+-====---3321,2,1,0,1321321n n n n f f f f f f f n n n n 求1001~f f 中:(1) 最大值、最小值、各数之和; (2)正数、零、负数的个数。
>> a = 0; b = 0; c = 0; for i = 1:100if (i==1)f(i) = 1;elseif (i==2)f(i)=0;elseif (i==3)f(i)=1;elsef(i)=f(i-1)-2*f(i-2)+f(i-3);endif (f(i)>0)a = a+1;endif (f(i)==0)b = b+1;endif(f(i)<0)c = c+1;endendmax_f = max(f)min_f = min(f)sum_f = sum(f)abc最大值、最小值、各数之和乤max_f =437763282635min_f =-899412113528sum_f =-742745601951正数、零、负数的个数如下:a = 49b = 2c =496.有三个多项式p1(x)=x4+2x3+4x2+5,p2(x)=x+2,p3(x)=x2+2x+3,试进行下列操作:(1)求P(x)=P1(x)+P2(x)P3(x);(2)求P(x)的根;(3)当x 取矩阵A 的每一元素时,求P(x)的值,其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=5.2505.3275.04.12.11A (4) 当以矩阵A 为自变量时,求P(x)的值,其中A 的值与(3)题相同。
>> p1=[1,2,4,0,5]; p2=[1,2]; p3=[1,2,3]; p2=[0,0,0,p2]; p3=[0,0,p3];p4=conv(p2,p3); %p4是p2与p3的乘积后的多项式 np4=length(p4); np1=length(p1);p=[zeros(1,np4-np1) p1]+p4 %求p(x)=p1(x)+p2(x) x=roots(p) %求p(x)的根 A=[-1 1.2 -1.4;0.75 2 3.5;0 5 2.5];y=polyval(p,A) %x 取矩阵A 的每一元素时的p(x)值7. 分别对符号矩阵22sin()x x t t x e ⎡⎤⎢⎥⎣⎦的两个变量求微分。
实训三 MATLAB 图形系统1.设x xxy cos ]1sin 35.0[2++=,在x =0~2π区间取101点,绘制函数曲线。
x1 = linspace(0,2*pi,100);y1 = 0.5+3*sin(x1)./(1+x1.^2); plot(x1,y1)2.已知y1=x 2,y2=cos(2x),y3=y1*y2,完成下列操作(x ∈(0,10)): (1)在同一坐标系下用不同的颜色和线型绘制三条曲线; x = linspace(-pi,pi); y1 = x.^2;y2 = cos(2*x); y3 = y1.*y2; figureplot(x,y1,'g--',x,y2,'b:',x,y3,'r-')(2)在不同的图形窗中分别用条形图、阶梯图、杆图绘制三条曲线。
x = linspace(-pi,pi);y1 = x.^2;y2 = cos(2*x);y3 = y1.*y2;figuresubplot(221)plot(x,y1)title('y1=x^2')subplot(222)plot(x,y2)title('y2=cos(2x)')subplot(212)plot(x,y3)title('y3=y1*y2')3.绘制极坐标曲线)sin(θρn b a +=,并分析参数n b 、、a 对曲线形状的影响。
a=2 b=pi/4 n=2;a=2 b=0 n=3a=2; b=pi/4; n=2;theta = 0:0.01:2*pi; rho = a*sin(b+n*theta); polar(theta,rho,'k')a=2; b=0; n=3;theta = 0:0.01:2*pi; rho = a*sin(b+n*theta); polar(theta,rho,'k')由上2图可知,当n 为偶数时画出该偶数的两倍个偶数环,当n 为奇数时画出奇数个环,参数a 控制极坐标的半径,参数b 可以对图进行角度旋转。
4.绘制分段函数⎪⎩⎪⎨⎧=<≤<≤<≤+--=5.2:5.0:0,322110,121,2224t t t t t t t t z 其中提示:用逻辑表达式求分段函数值。
实训四 SIMULINK 仿真控制系统实验1.利用SIMULINK 仿真来实现摄氏温度到华氏温度的转化:3259c f +=T T (c T 范围在-10℃~100℃)2.已知系统的动态结构图模型,绘制其单位负反馈系统的单位阶跃响应曲线,并判断闭环系统的稳定性。
由scope 仿真的曲线可知,改闭环系统是稳定系统。
3.某控制系统结构图如图所示,编程实现如下要求。
(1)利用MATLAB建立上述控制系统的数学模型;(2)绘制开环系统的Bode图和Nyquist曲线;(3)判断系统的稳定性,如不稳定,绘制闭环系统的根轨迹点图;由开环系统的Bode图和Nyquist曲线可知,改系统是不稳定(4)绘制系统的阶跃响应曲线。
实训五 MATLAB仿真控制应用实验一.《数值计算》应用1.求三元非线性方程2210341x xx zyz⎧++=⎪+=⎨⎪=-⎩的解。
(提示:solve)>> a = sym('x^2+2*x+1');b = sym('x+3*z=4');c = sym('y*z=-1');[x,y,z] = solve(a,b,c) x =-1y =-3/5z =5/32.试求kxx x⎪⎭⎫⎝⎛-∞→11lim的极限。
>> syms x ky = (1-1/x)^(k*x);limit(y,x,inf)ans = exp(-k)二.《数字电子技术》应用1.设计一个2位的串行加法器2.数字电子电路(A\B\C涵盖八种状态)三、《电力电子技术》 1.设计单相桥式全控整流电路,变压器一次侧电压220V ,变比n1:n2=1:2;电阻为10Ω,用示波器观察变压器一二次侧及负载上的电压。
(验证阻性感性负载电压波形)2.设计三相桥式全控整流电路四、自动控制原理1.设计串联控制器对下列系统进行校正,要求校正后系统的静态速度误差系数等于30s -1,相角裕度不低于40°,幅值裕度不小于10dB ,截止频率不小于2.3rad/s 。
提示:'''''1.010)()lg(20c c bTL b ϖϖ==+设计串联校正环节。
2.已知两子系统传递函数分别为:15)(1+=s s G 9287)(22+++=s s s s G 试求:(1) 两系统并联连接的等效传递函数,观察其单位阶跃响应;num1 = [5];den1 = [1,1];num2 = [7,8];den2 = [1,2,9];[num,den] = parallel(num1,den1,num2,den2); step(num,den)grid on(2)两系统串联连接的等效传递函数,观察其单位阶跃响应;num1 = [5];den1 = [1,1];num2 = [7,8];den2 = [1,2,9];[num,den] = series(num1,den1,num2,den2);step(num,den)grid on(3)以G2(s)为前向通道函数,以G1(s)为反馈通道函数,观察其单位阶跃响应。