三帧差分法
运动目标检测方法的对比分析和仿真实现

) =
D (,) t e kxy >h s l hd r o ) } ≤t l r
.
I2 ()
Rc : w。 , { hD +y :: h = : 。k w e n
+l
+
d ( y > h s o 2 t h x ) re l
, ,
中图分类号
T 3 14 P9.1
文献标识码
A
文章编号
10 7 2 (0 1 1 0 7— 80 2 1 )2—12— 2 1 0
C mp rsna dSmuaino eMeh d o vn jc tcin o ai n i lt f h to sfrMo igObet et o o t De o
陕西 西安
摘 要
70 8 ;3 武警石 家庄指挥学 院 训 练部 ,河北 石家庄 10 6 .
00 6 ) 5 0 1
研 究了 目前运动 目标检测 常用的两种方 法:三帧差分 法及混合 高斯模型 背景 差分 法,并对两种运动 目标
运 动 目标 检 测 ;三 帧 差 分 法 ;混 合 高斯
检 测 方 法 作 了 简述 ,且 辅 以典 型 的 视 频 运 动 目标 检 测 实例 ,给 出 了 两种 方法 的 实验 结 果 ,指 出其 适 用范 围及 优 缺 点 关键词
ห้องสมุดไป่ตู้
运动 目标检 测 在 视 频 分 析 、 频 编解 码 及 视 频监 视
控等方面起着重要的作用 。运动 目标检测 即实时的检
测运 动 目标 , 其 提取 出来 。在序 列 图像处 理 中 , 并将 运 动 目标 的检测 方法 总体 上可 归纳为 以下 3类 : 流法 、 光
帧差 法和 背景 差法 。
一种基于OpenCV实现的三帧差分运动目标检测算法研究
K y W o d t r ef medf rn i , eet n o vn be t Op n V e r s h e-r i ee t l d tci f a f a o mo ig o jc , e C
Cls mb r TP 0 . a s Nu e 3】6
1 引言
现实 生活 中, 量有 意义 的视 觉 信息 都 包 括在 大 运 动之 中 。尽 管 人类 的 视 觉 即 能看 见 运 动物 体 又 能看 到静 止 的物 体 , 是 在 许 多 场 合 , 但 比如 重 要 场
t n S me smu a i n t s sa e c r id O t b h l o ih a d t e b sc fa i e e c t o i . o i lt e t r a re u y t e a g rt m n h a i r me d f r n e me h d,r s e t e y o o f e p c i l ,mo 的基础 , 取 准确 的 获 运 动 目标对 于 后 面 的处 理具 有 重 要 意 义 , 此 , 因 研
徐 卫星 王 兰英 李 秀娟
郑州 400) 5 O 7 ( 河南工业大学 电气工程学院
摘
要
运 动 目标检测在视觉监控系统 、 医学 图像 分析 、 工业检测 和军事等领域 有着广泛 的应用 。运动 目标 检测处于
这些应 用的最前端 , 检测结果 的准确 精度 对后 续处理 有很 大 的影 响 。文 中提 出 了一 种三帧 差分运 动 目标 检测算 法 , 利用
总第 2 5 6 期 2 1 年第 1 期 01 1
基于改进的三帧差分法运动目标检测

【 中图分类号】T N 9 1 1 . 7 3
【 文献标志码】 A
Mo v i n g Ob j e c t s D e t e c t i o n B a s e d o n I mp r o v e d T h r e e F r a me D i f e r e n c e
DI NG L e i , GONG Ni n g s h e n g
C o l l e g e o f E l e c t r o n i c s a n d l n f o r m  ̄ t i o n E n g i n e e r i n g , n j i g n U n i v e r s i t y f o T e c h n o l o g y , №n j i n g 2 1 1 3 1 6 , C h i n a ) 【 A b s t r a c t 】 T o a c c u r a t e l y a n d e ic f i e n t l y i m p r o v e t h e m o v i n g o b j e c t s d e t e c t i o n , t h i s p a p e r p r o p o s e s a n i m p o r v e d t h r e e L a m e d i f e r e n c e a l g o r i h t m, w h i c h
hr t e s ho l d e x r t a c i t o n r e d u c e he t e fe c t o f he t s u n s h i n e a n d n o i s e .Ex p e ime r n t l a r e s u l t s d e mo n s ra t t e ha t t he t lg a o r i hm t c a n d e t e c t he t e n t i r e t y o f t h e mo v i a a v o i d u n d e t e c t e d e r r o r .T hi s a l g o i r t h m c a n a c c u r a t e l y a n d e ic f i e n t l y d e t e c t h t e m o v i n g o b j e c t s d e t e c t i o n .
三帧差法和Mean-shift结合的行人检测与跟踪研究

采用基于 Me a n - s h i f t 的轮廓跟踪 算法对行 人进 行 实时跟踪 。实验结果表 明,该 算法能够将 不 包含行人信 息的 区域进 行 筛选 排 除 ,在 不降低检测效果 的情 况下明显提 高 了行人检测及跟踪的效率 ,具有较强 的鲁棒性 。
关 键 词 :三 帧 差 法 ;Me a n - s h i f t ;背 景 差 分 法 ;HOG 算 子 ;支 持 向 量 机 中 图 法分 类 号 :T P 3 9 1 . 4 1 文 献 标 识 号 :A 文 章 编 号 :1 0 0 0 — 7 0 2 4( 2 0 1 4 )O 1 — 0 2 2 3 — 0 5
姚 倩 ,安 世 全 , 姚 路
( 1 . 重庆 邮 电大 学 计 算机 科 学与技 术 学 院 ,重 庆 4 0 0 0 6 5 ;2 . 重庆邮 电 大学 移通 学院 ,重庆 4 0 1 5 2 0 )
摘 要 :为 了快 速 、准 确 地 对视 频 序 列 中的 行 人 进 行 检 测 和 跟 踪 ,提 出 了一 种 基 于 运 动 区域 的 Me a n - s h i f t 行 人 检 测 和 跟 踪 算 法 。采 用 改 进 的 背景 差分 的 三 帧 间 差 分 法 对 运 动 区域 进 行 提 取 ,并 通 过 离线 训 练 的 H( X 3分 类 器 对 行 人 进 行 识 别 。提 出
2 0 1 4年 1 月
计 算机 工 程 与 设 计
C( ) MP UTER ENGI NEE RI NG AND DE S I GN
J a n .2 0 1 4
Vo 1 . 3 5 No 法 和 Me a n — s h i f t 结 合 的行 人检 测 与 跟踪 研 究
基于三帧时间差分法的独居老人运动检测
关 键词 : 帧 差 分 法 ; 三 运动 检 测 ; 居 老 人 独
D :0 7 8 .s.0 2 8 3 . 1 . . 1 文章编号 :0 2 8 3 (0 0 1— 29 0 文献 标识码 : 中图分类 ̄' P 9 OI 1. 7 /i n10 — 3 1 0 01 0 3 js 2 37 10 — 3 1 2 1 )3 0 3 — 3 A : 31 T
l 引言
数据表 明 , 中国已经进入老龄化社会} 如何对老年人进行 l 】 ,
照顾 已经成 为—个 日益 引起关注 的问题 , 尤其独居老人 的 日常 生活安全对 构建和谐社会具有重要 意义 。 利用摄像机 的非接触
fa — i e e c gC mp tr E gn e ig a d A p e t n , 0 0 4 ( 3 :3 - 4 . r me df rn i . o ue n i e r p f ai s 2 1 。 6 1 ) 2 9 2 1 f n n n i o
Ab t a t Ch n a e t r d t e gn o i t. h ed ry h v e o n n r a ig o c r . h e t n a g rt m f id o sr c : i a h s n e e h a i g s c eyT e l el a e b c me a i ce sn c n e n T e d  ̄ci l o h o n o r o i
3 fa — i e e c n r p l d t h ma e s g n ai n o n i d o l e v n lwl n h a i si t n f r h s e - r me d f r n i g a e a p i o t e i g e me tt f a n o r e d r mo i g s f e o o y a d te b s et c mai o i/ r o h a t i o t r . e x e i n s s o t a h u n p s r ma e a e e me td u c sf l .h e l t rq ie n s ci t p su eTh e p rme t h w h t t e h ma o t e i g c n b s g ne s c e s l T e r a i vy u uy me e u r me t i s t fe a d i l y o d b ss f r t e f l wig i e t y n h l e l o t r n e e mi i g h s e e u t . a i id, n t a s a g o a i o h ol n d n i i g t e ed ry p su e a d d tr n n i/ r s c r y s o f h i Ke r s t r e fa -df r n ig; t n d tc in:h l el gn -i— lc y wo d : h e - r me i e e cn moi ee t o o t e ed r a ig n p a e y
帧差法
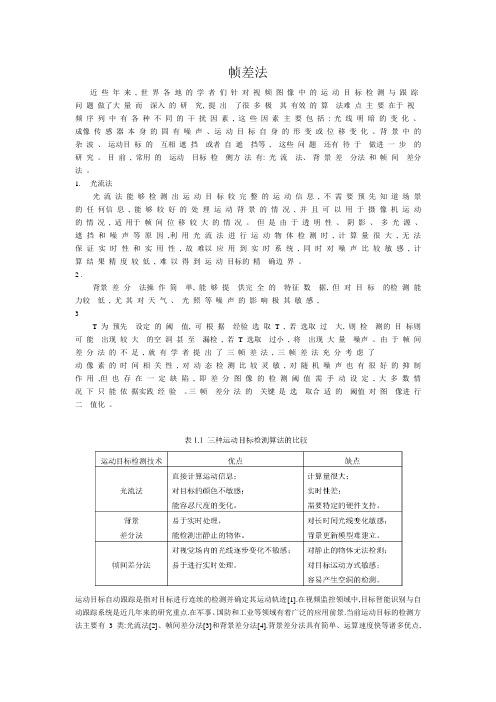
帧差法近些年来, 世界各地的学者们针对视频图像中的运动目标检测与跟踪问题做了大量而深入的研究, 提出了很多极其有效的算法难点主要在于视频序列中有各种不同的干扰因素, 这些因素主要包括: 光线明暗的变化、成像传感器本身的固有噪声、运动目标自身的形变或位移变化、背景中的杂波、运动目标的互相遮挡或者自遮挡等, 这些问题还有待于做进一步的研究。
目前, 常用的运动目标检侧方法有: 光流法、背景差分法和帧间差分法。
1.光流法光流法能够检测出运动目标较完整的运动信息, 不需要预先知道场景的任何信息, 能够较好的处理运动背景的情况, 并且可以用于摄像机运动的情况, 适用于帧间位移较大的情况。
但是由于透明性、阴影、多光源、遮挡和噪声等原因,利用光流法进行运动物体检测时, 计算量很大, 无法保证实时性和实用性, 故难以应用到实时系统, 同时对噪声比较敏感, 计算结果精度较低, 难以得到运动目标的精确边界。
2 .背景差分法操作简单, 能够提供完全的特征数据, 但对目标的检测能力较低, 尤其对天气、光照等噪声的影响极其敏感,3T 为预先设定的阈值, 可根据经验选取T , 若选取过大, 则检测的目标则可能出现较大的空洞甚至漏检, 若T 选取过小, 将出现大量噪声。
由于帧间差分法的不足, 就有学者提出了三帧差法, 三帧差法充分考虑了动像素的时间相关性, 对动态检测比较灵敏, 对随机噪声也有很好的抑制作用,但也存在一定缺陷, 即差分图像的检测阈值需手动设定, 大多数情况下只能依据实践经验。
三帧差分法的关键是选取合适的阈值对图像进行二值化。
运动目标自动跟踪是指对目标进行连续的检测并确定其运动轨迹[1].在视频监控领域中,目标智能识别与自动跟踪系统是近几年来的研究重点.在军事、国防和工业等领域有着广泛的应用前景.当前运动目标的检测方法主要有3类:光流法[2]、帧间差分法[3]和背景差分法[4].背景差分法具有简单、运算速度快等诸多优点,使得该法作为运动目标检测的基本方法被普遍采用.但该法暴露出若干问题:一种是因外部条件引起的,如对光线的变化、噪声等造成差分图像检测精度不高,甚至失效;另一种是由差分图像法本身内在局限引起的,主要有空洞[5]、拖影,以及运动目标被拉长等现象.光流法[6]虽然能够适用于静态背景和动态背景两种环境,有较好的适应性,但是其计算复杂度高,运算时间开销很大,不能满足实时性的要求.帧差法[7]比较简单,实时性高,它主要包括减背景方法和相邻帧相减法,即三帧差分法.减背景方法存在背景获取困难、受光照影响严重且更新困难等问题.三帧差分法受光照和阴影影响较小.笔者对三帧差分法进行改进,提出了一种简单有效的运动目标检测方法.1 运动目标实时跟踪系统1. 1 帧差法的基本原理帧间差分法的基本原理就是将前后两帧图像对应像素点的灰度值相减,在环境亮度变化不大的情况下,如果对应像素灰度相差很小,可以认为此处物是静止的;如果图像区域某处的灰度变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记下来,利用这些标记的像素区域,就可以求出运动目标在图像中的位置.一般采用的帧差法是在连续的图像序列[8]中2个或3个相邻帧间采用基于像素的时间差分并且阈值化来提取图像的运动区域.该运动目标实时跟踪系统是采用三帧差分来进行运动目标检测,这种方法不仅能提高运动目标检测[9]的速度,而且提高了所检测运动目标图像的完整性.均值滤波均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标象素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
一种基于改进三帧差分和ViBe算法的运动目标检测算法

一种基于改进三帧差分和ViBe算法的运动目标检测算法谢红;原博;解武【摘要】近几年提出的ViBe算法具有运算速度快,目标提取准确率高的特点,但是它对光照的突然变化也非常敏感,而且由于它的模型初始化的方式,也容易形成“拖影”现象。
文中先通过引入传统三帧差分算法难以提取出完整的目标轮廓这一问题,提出一种结合边缘检测的改进三帧差分算法。
该算法在提取出完整的运动目标的同时不会附加冗余的边缘信息。
然后将该算法引入到ViBe算法中,使2种方法结合,一方面消除“拖影”现象,另一方面可以自适应地选择检测的方法,以消除光照突变造成的影响。
试验结果表明,该改进算法是一种适应性强、鲁棒性高的运动目标检测算法。
%The ViBe algorithm proposed in recent years has the characteristics of high computing speed and high accuracy of object extraction. But it is sensitive to the light mutation. And it is also easy to form the"smear" phe⁃nomenon because of its model initialization modes. Firstly, this article proposed the improved three⁃frame difference algorithm combined with edge detection by introducing the problem that the traditional three⁃frame difference algo⁃rithm is difficult to extract the complete contours of the targets. This algorithm can extract the complete moving tar⁃gets without additional redundancy edge information. Then this algorithm is introduced into the ViBe algorithm and is combined with it. The improved algorithm can eliminate the"smear" phenomenon. and it can select the suitable detection method adaptively to eliminate the impact caused by the light mutation. The experimental results show that, this method is an effective moving target detection method.【期刊名称】《应用科技》【年(卷),期】2016(043)006【总页数】7页(P46-52)【关键词】视觉背景提取算法;三帧差分法;边缘检测;“拖影”现象;光照突变【作者】谢红;原博;解武【作者单位】哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨150001;哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨150001;哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TN911.73运动目标检测就是将视频序列中的运动目标与所在的背景图像相分离,从而可以获得目标的前景,也就是确切的运动目标。
图像处理算法之帧间差分法
图像处理算法之帧间差分法
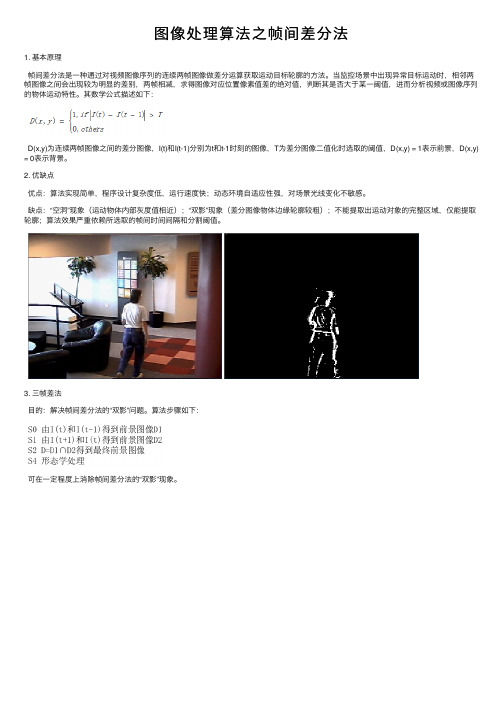
1. 基本原理
帧间差分法是⼀种通过对视频图像序列的连续两帧图像做差分运算获取运动⽬标轮廓的⽅法。
当监控场景中出现异常⽬标运动时,相邻两帧图像之间会出现较为明显的差别,两帧相减,求得图像对应位置像素值差的绝对值,判断其是否⼤于某⼀阈值,进⽽分析视频或图像序列的物体运动特性。
其数学公式描述如下:
D(x,y)为连续两帧图像之间的差分图像,I(t)和I(t-1)分别为t 和t-1时刻的图像,T 为差分图像⼆值化时选取的阈值,D(x,y) = 1表⽰前景,D(x,y)= 0表⽰背景。
2. 优缺点
优点:算法实现简单,程序设计复杂度低,运⾏速度快;动态环境⾃适应性强,对场景光线变化不敏感。
缺点:“空洞”现象(运动物体内部灰度值相近);“双影”现象(差分图像物体边缘轮廓较粗);不能提取出运动对象的完整区域,仅能提取轮廓;算法效果严重依赖所选取的帧间时间间隔和分割阈值。
3. 三帧差法
⽬的:解决帧间差分法的“双影”问题。
算法步骤如下:
可在⼀定程度上消除帧间差分法的“双影”现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三帧差分法的问题
大家帮忙看看这个三帧差分法的代码哪里出了问题?参照论坛上的相邻帧差法,改造成三帧差分法。
clc;
clear;
targetavi='SampleVideo.avi'; %%原始视频
resultavi='result.avi'; %%检测结果视频%%%%%%%%%%%%%%%%%%%%%%读取视频
mov=aviread(targetavi);
%mov=mmreader(targetavi);
fnum=size(mov,2);
%%%%%%%%%%%%%%%%%%%%%%建立结果视频
aviobj = avifile(resultavi);
aviobj.Quality = 100;
aviobj.Fps = 15;
%pression='Indeo5';
pression='None';
%%%%%%%%%%%%%%%%%%%%%%帧间差分法
for i=2:fnum
x=mov(i-1).cdata(:,:,:);
y=mov(i).cdata(:,:,:);
z=mov(i+1).cdata(:,:,:);
m=rgb2gray(x);
m=medfilt2(m);
n=rgb2gray(y);
n=medfilt2(n);
o=rgb2gray(z);
o=medfilt2(o);
q=im2double(n);
w=im2double(m);
p=im2double(o);
c=q-w;%%前两帧差分
b=p-q;%%后两帧差分
t=40; %%阈值,此值可以调节
t=t/256;%%转化为double型数据
k=find(abs(c)>=t);%%find函数作用是找到图c中的值大于t的点坐标
d=find(abs(b)>=t);%%find函数作用是找到图b中的值大于t的点坐标
c(k)=255;%%二值化的一
b(d)=255;
k=find(abs(c)<t);
d=find(abs(b)<t);
c(k)=0;%%二值化的零
b(d)=0;
f=c&b;
imshow(f);
adata=cat(3,f,f,f);%%灰度图像生成视频必加此句
aviobj = addframe(aviobj,adata);%%生成视频
hold on;
drawnow;
hold off;
end
aviobj=close(aviobj);
显示的错误提示:
??? Error using ==> avifile.addframe>getInputType at 384
Invalid input argument. Each frame must be a numeric matrix, a MA TLAB movie structure, or a handle to a figure
or axis.
Error in ==> avifile.addframe at 58
inputType = getInputType(varargin{i});
Error in ==> ThreeFrameDifference at 61
aviobj = addframe(aviobj,adata);%%生成视频
TOP
Matlab中文函数大全上线,欢迎大
家完善!点。