脉冲当量与齿轮比之欧阳家百创编
(整理)脉冲当量计算
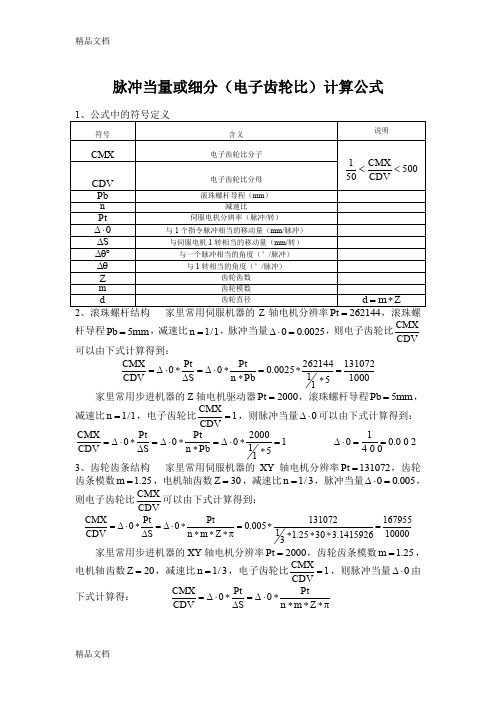
脉冲当量或细分(电子齿轮比)计算公式
杆导程mm 5Pb =,减速比1/1n =,脉冲当量0025.00=⋅∆,则电子齿轮比CDV
CMX 可以由下式计算得到:
100013107251
12621440025.0Pb n Pt 0S Pt 0CDV CMX =**=**⋅∆=∆*⋅∆= 家里常用步进机器的Z 轴电机驱动器2000Pt =,滚珠螺杆导程mm 5Pb =,
减速比1/1n =,电子齿轮比1CDV
CMX =,则脉冲当量0⋅∆可以由下式计算得到: 151
120000Pb n Pt 0S Pt 0CDV CMX =**⋅∆=**⋅∆=∆*⋅∆= 0025.040010==⋅∆ 3、齿轮齿条结构 家里常用伺服机器的XY 轴电机分辨率131072Pt =,齿轮齿条模数25.1m =,电机轴齿数30Z =,减速比3/1n =,脉冲当量005.00=⋅∆,
则电子齿轮比CDV
CMX 可以由下式计算得到: 100001679551415926.33025.13
1131072005.0Z m n Pt 0S Pt 0CDV CMX =****=π****⋅∆=∆*⋅∆= 家里常用步进机器的XY 轴电机分辨率2000Pt =,齿轮齿条模数25.1m =,
电机轴齿数20Z =,减速比3/1n =,电子齿轮比1CDV
CMX =,则脉冲当量0⋅∆由下式计算得: π****⋅∆=∆*⋅∆=Z m n Pt 0S Pt 0CDV CMX
08996875
.1310001415926.32025.13
12000
01=****⋅∆= 50130899687.01000
08996875.130==⋅∆。
QD75电子齿轮比与每转脉冲数详细解析
当然也可以在三菱JE伺服控制器端不设置电子齿轮分子分母,可以直接设置PA05 参数,每转脉冲数FBP。 如果不设伺服控制器的电子齿轮比,只设PA05参数,例PA05设为5000,那么伺服 控制接收5000个脉冲,马达转一圈。 脉冲当量:10 / 5000=0.002mm,验算马达最大转数,电机额定转数3000 r/ min。 每转脉冲数 = 最大脉冲输入数 * 1000 / (电机额定转数 / 60) 5000*50=250 000所以要限制最大脉冲数位250Kpps。 QD75里速度控制值时30000mm/min 如果设置PA05为10000,脉冲当量是0.001mm限制最大脉冲数位500Kpps。 QD75里速度控制值时30000mm/min
FX3U本体输出点控制马达例子
已知:滑台导程12mm,马达编码器的分辨率是20480脉冲/ r,控制器可以接收 线性差分信号500kpps以下;还可以接收开路集电极信号100kpps以下。马达 额定转速3000 r / min,机械特性Pb / Pt = 12 / 20480 = 0.0005859mm, 滑台重复定位精度+/- 0.02mm,用FX3GA本体的点位发脉冲控制马达。马达和滑 台用联轴器连接,没有减速机。(FX3GA , 集电极开路100kpps脉冲。)
电子齿轮 = 伺服侧电子齿轮比 * 每转脉冲数 /(每转移动量*单位倍率) 把参数代入公式:电子齿轮 = (4 / 1)* (32768/ 20)= 32768 / 5 (每转移动量要换算成mm) 由于机构的机械特性Pb / Pt = 20 / 131072 = 0.0001525mm, 以上设置得出脉冲当量是0.00061mm,大于机械特性0.0001525mm。设置是正确的。 方法二: JE马达编码器分辨率是131072,没有减速机,丝杠螺距20mm;设置的参数是: QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍; 伺服放大器侧电子齿轮比设置为8192/125=65.536 那么根据脉冲当量 = 导程/(减速比 * 伺服电机每转一圈的脉冲数。) 算出伺服电机每转一圈的脉冲数 = 20 / 0.01= 2000, 对于导程是20mm的螺杆,定位模块每转发2000的脉冲,对于QD75定位来说发脉 冲太少了,再用驱动器的电子齿轮来放大脉冲,定位时加减速冲击较大,设备容 易晃动,使用了S型曲线加减速功能也没有效果。所以不推荐使用这种设置。 MR-JE电子齿轮A/B倍 A = 1 ~ 16777215、B = 1 ~ 16777215、1/10 < A/B < 4000, 我们用QD75定位模块来进行定位时,尽量让QD75每转发送脉冲数多一些,伺服 侧电子齿轮A/B值小一些。总线式的伺服都抛弃了电子齿轮比概念了。
脉冲当量与电子齿轮比的计算(图文并茂)

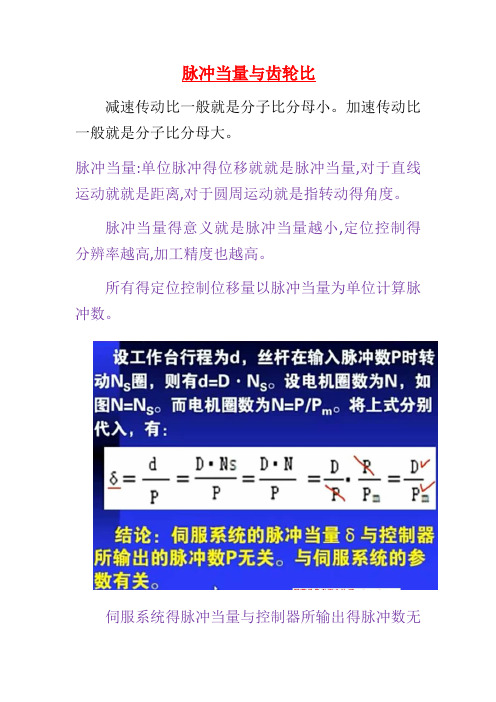
脉冲当量与电子齿轮比的计算(图文并茂)例1:控制器输出脉冲数为P,丝杆螺矩为D,编码器分辨率为Pm,求该伺服系统的脉冲当量。
设工作台行程为d,丝杆在输入脉冲数p时转动N s,圈,则有d=D . N s :设电机圈数为N,如图:N=N S,而电机圈数为N=P/P m.将上式分别代入下式,有:在1:1的脉冲当量=螺距D/编码器分辨率P m例2:机械减速器的减速比为K:1,当电机转K圈时,丝杆才转1圈:N S=工作台圈数 N=电机圈数 K=比例倍数 N S=N/K例3:控制圆盘转动的伺服定位系统,这时其所移动的是转动角度,脉冲当量为控制器每发出一个脉冲为圆盘转动角度值。
例4:驱动输送带或线材前进的伺服定位系统,这时其移动量为输送带或线材移动的距离; D=直径例5:齿轮传动机构,设齿轮的模数为m,齿数为z,这时齿条的位移d跟齿轮的分度圆有关,据机械常识有齿轮的分度圆直径为mz,则其分度圆周长为πmz:步进系统:步进电机通过丝杆带动工作台移动,设步进电机的步距角为,步进驱动的细分数为m,丝杆的螺距为D:则有步进电机一圈所要脉冲数P为:其脉冲当量为:电子齿轮:已知:则:可总结为:例:丝杆螺距D=10mm,编码器分辨率P m=4096,要求系统的脉冲当量=1mm/pls,试设置齿轮比:1mm=1000μm先求固有的脉冲当量:再由系统脉冲当量求电子齿轮比:电子齿轮比设置:CMX=4096CDV=10000电子齿轮对电机转速调节作用例:电机额定转速为3000r/min,PLC最大输出频率为100KHZ,编码器分辨率P m=4096,如希望电机在额定转速下工作,则设定电子齿轮比:先求固有转速N m:再求设电子齿轮比:电机最大转速的核算:例:电机额定转速为n N=2000r/min,PLC最大输出频率为100KHZ,减速比为K=4,螺距D=10mm,编码器分辨率P m=8192,要求脉冲当量为1μm/pls,试设电子比:先求固有脉冲当量:代入电子齿轮公式:电子齿轮比设置:CMX=32768CDV=10000对电机最大转速进行核算:应用中最高输出脉冲频率fm为:电子齿轮比计算样例CMX:电子齿轮比的分子是电机编码器反馈脉冲。
PLC定位控制基础:电子齿轮比对脉冲当量和电机转速的调整作用

PLC定位控制基础:电子齿轮比对脉冲当量和电机转速的调整作用项目设计流程:一个项目电气工程师要做的设计思路三菱Q系列PLC,Modbus 通信控制施耐德变频器运行万用表应用基础知识,口诀速记万用表使用注意事项FX5U PLC,FB块的建立与调用,编写延时启保停程序PLC通信基础知识三菱PLC,CC-Link通信协议基础知识光电开关的L-ON,D-ON,是什么意思?如何接线?三菱FX5UPLC,MODBUS专用通信指令控制PLC运行什么是ST语言?三菱PLC,ST语言创建方法及注意事项电工基础,电工最基础、最核心的知识是掌握电的回路三菱PLC输出接线,一篇文章搞懂,其他品牌大同小异变频器前世今生,从电动机使用上浅谈变频器的发展史基恩士FSN18N光纤传感器感光度异常处理,参数调校欧姆龙(OMRON)E5CC温控器控制加热启停的设置欧姆龙E3X-HD10光纤放大器调整20210322资料更新一、电子齿轮比对脉冲当量的调整作用上一文章,讲了脉冲当量与系统本身的固有参数有关,与所发脉冲数无关,称为固有脉冲当量δ0。
参阅:《PLC定位控制基础:脉冲当量的计算与调整》。
固有脉冲当量δ0不符合控制要求时,通过电子齿轮比的调整来使控制系统的脉冲当量δ符合要求。
典型丝杆系统为例:因:δ0=d/P0,δ0——电机侧伺服器输出的电子齿轮比为1时的脉冲当量,d——位移距离,P0——电机侧伺服器发的脉冲数。
δ=d/P,δ——控制器的脉冲当量,d——位移距离,P——控制器发的脉冲数。
得到:δ0/δ=(d/P0)/(d/P)=(d*P)/(d*P0)=P/P0=CDV/CMX,即:δ=δ0*CMX/CDV。
所以,当固有脉冲当量δ0不符合控制要求时,可以设置电子齿轮比CMX/CDV,使实际的脉冲当量δ符合控制要求,二、电子齿轮比对电机转速的调整作用当控制器输出的脉冲频率使电机转速n不符合控制要求时,也可以通过电子齿轮比的调整来使实际电机的转速n0符合控制要求。
电子齿轮比与脉冲当量应用换算

电子齿轮比与脉冲当量应用换算一、科普一下这几个参数在定位参数的基本参数里,有四个相关的参数,分别是单位设置、每转脉冲数、每转移动量、单位倍率。
1.单位设置这个参数设置的是定位控制时的指令单位,可以设置为mm、inch、degree、pulse。
如果设置为脉冲单位pulse,那么我们在发定位指令时就是以脉冲为单位了,这时我们就该关心程序里应该发多少脉冲了。
如果设置为毫米mm,那么我们发定位指令时就可以直接让控制对象(比如丝杠)走多少距离,而不需要也不应该操心程序里应该发多少脉冲。
2.每转脉冲数这个参数设置的是电机轴每转所需要的脉冲数。
3.每转移动量这个参数设置的是当伺服电机转动一转时,控制对象(比如丝杠)走多少距离。
举个例子,丝杠的螺距是2mm,伺服电机直接带动丝杠,没有减速机,那么伺服电机转动一转时,丝杠移动量2mm,所以这里应该设置为2000um(前述提到的“单位设置”应设置为mm)4.单位倍率这个参数是当每转移动量超出设置范围时可以作出的调整。
在使用QD75等定位模块时,会发现,每转脉冲数的设置范围是0-65535,每转移动量则与单位有关,若单位是pulse,则范围是1-65535pulse;若单位是mm,这范围是0.1-6553.5um。
显然,第一,如果用的是JE伺服,那么每转脉冲数要设置为131072啊!第二,如果丝杠螺距超过7mm,每转移动量也无法设置。
在QD75里,如果每一脉冲的位移量小于1,则会发生命令频率变化。
较小的设置会增加变化并可能导致机器振动。
如果每一脉冲的位移量变为小于1,则也使用驱动装置的电子齿轮功能并进行设置使每一脉冲的位移量大于等于1。
这段话的意思是AL*AM / AP >=1.二、举个实际例子有一设备伺服轴,用的是MR-JE的马达,JE马达编码器分辨率是131072,丝杠螺距20mm;客户设置的参数是:QD75设置:每转脉冲数设置为1pulse,每转移动量设置为10um,单位倍率为1倍;伺服放大器侧电子齿轮比设置为8192/125;Pb:丝杆导程 n:减速比 Pt:电机编码器分辨率(脉冲/转)三角L0:每脉冲对应的进给量(mm/脉冲)三角S:电机每转对应的进给量(mm/r)CMX / CDV = 三角L0* Pt / 三角S = 三角L0* Pt / (n*Pb)CMX / CDV = (0.01*131072) / 20 = 8192 / 125QD75每转脉冲数设置AP为1pulse,每转移动量设置AL为10um,单位倍率AM为1倍,所以电机转一圈所需脉冲数为:脉冲当量= 导程/(减速比*伺服电机每转一周的定位模块脉冲数。
电子齿轮比与脉冲当量相关计算

电子齿轮比与脉冲当量相关计算1. 电子齿轮比(Gear ratio)其中,输出脉冲数是输出轴在一定时间内产生的脉冲数,输入脉冲数是输入轴在同样时间内产生的脉冲数。
2. 脉冲当量(Pulse equivalent)脉冲当量表示电子齿轮系统中每个脉冲对应的位置变化。
对于旋转运动,脉冲当量通常是表示角度变化,单位为度或弧度;对于直线运动,脉冲当量可以表示位移的变化,单位为毫米或英寸等。
脉冲当量和电子齿轮比之间的关系可以通过以下公式计算:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)其中,齿轮一圈的脉冲数是指齿轮转一圈所产生的脉冲数。
3.相关计算方法为了更好地理解电子齿轮比和脉冲当量的计算方法,我们可以通过以下实例进行说明。
例1:假设一个电子齿轮系统中,输入轴每转一圈产生100个脉冲,输出轴每转一圈产生500个脉冲。
求电子齿轮比和脉冲当量。
解:根据电子齿轮比的定义可得:接下来,根据脉冲当量的计算公式可得:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)=360°/(5*500)≈0.144°所以,该电子齿轮系统的电子齿轮比为5,脉冲当量为0.144°。
例2:假设一个电子齿轮系统中,输入轴每转一圈产生2000个脉冲,输出轴每转一圈产生6000个脉冲。
求电子齿轮比和脉冲当量。
解:脉冲当量=360°/(电子齿轮比*齿轮一圈的脉冲数)=360°/(3*6000)≈0.02°所以,该电子齿轮系统的电子齿轮比为3,脉冲当量为0.02°。
综上所述,电子齿轮比和脉冲当量是电子齿轮系统中重要的参数,通过计算可以得到它们之间的关系。
在实际应用中,根据具体的输入和输出要求,可以选择合适的电子齿轮比和脉冲当量,以实现精确的位置控制。
脉冲当量与齿轮比
脉冲当量与齿轮比
减速传动比一般就是分子比分母小。
加速传动比一般就是分子比分母大。
脉冲当量:单位脉冲得位移就就是脉冲当量,对于直线运动就就是距离,对于圆周运动就是指转动得角度。
脉冲当量得意义就是脉冲当量越小,定位控制得分辨率越高,加工精度也越高。
所有得定位控制位移量以脉冲当量为单位计算脉冲数。
伺服系统得脉冲当量与控制器所输出得脉冲数无
关,与伺服系统得参数有关。
脉冲当量计算例1:
丝杆螺距D除编码器分辨率Pm=该伺服系统得脉冲当量
脉冲当量计算例2:
带减速轮得脉冲当量得计算:螺距/(编码器脉冲分辨率乘减速比K)
脉冲当量计算例3:
角度值得脉冲当量:360°/(编码器脉冲分辨率乘减速比K)
脉冲当量计算例4:
脉冲当量=πD(驱动轮得周长)/编码器分辨率
齿轮得直径计算方法:
齿顶圆得直径=(齿数Z+2)*模数
分度圆直径=齿数*模数
齿根圆直径=齿顶圆直径-(4、5X模数) 例如:M4 32齿
齿顶圆得直径:(32+2)*4=136mm
分度圆得直径mZ:32*4=128mm
分度圆得周长:πX128=401、92mm
齿根圆得直径:136-4、5*4=118mm
脉冲当量=πmZ(分度圆直径)/编码器分辨率
步进电机脉冲当量:
圈脉冲P=360°X细分倍数m/电机得步距角
1、
电子齿轮比: 2、
n为转速
现在就是每分钟1465转,要达到每分钟3000转需要设定电子齿轮比。
nN为额定转速,Pm编码器分辨率,f为系统输出频率,电机转速提高后,脉冲当量也会发生变化。
会变大,使精度变小。
根据电机额定转速计算电机额定转速时电子齿轮比、脉冲当量

根据电机额定转速计算电机额定转速时电子齿轮比、
脉冲当量
先根据电机额定转速,计算电机额定转速时电子齿轮比、脉冲当量:
1)位置环上限频率=周指令脉冲×电机转速;
2)周指令脉冲=位置环上限频率/电机转速
3)电子齿轮比=编码器解析度/周指令脉冲=编码器解析度/(位置环上限频率/电机转速)=(编码器解析度×电机转速)/位置环上限频率
4)脉冲当量=螺距/(减速比×周指令脉冲)=螺距/减速比÷周指令脉冲=螺距/减速比÷编码器解析度/电子齿轮比
5)这时,电机额定速度运行,电子齿轮比的设定值最大,脉冲当量的设定值最大;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脉冲当量与齿轮比
欧阳家百(2021.03.07)
减速传动比一般是分子比分母小。
加速传动比一般是分子比分母大。
脉冲当量:单位脉冲的位移就是脉冲当量,对于直线运动就是距离,对于圆周运动是指转动的角度。
脉冲当量的意义是脉冲当量越小,定位控制的分辨率越高,加工精度也越高。
所有的定位控制位移量以脉冲当量为单位计算脉冲数。
伺服系统的脉冲当量与控制器所输出的脉冲数无关,与伺服系统的参数有关。
脉冲当量计算例1:
丝杆螺距D除编码器分辨率Pm=该伺服系统的脉冲当量
脉冲当量计算例2:
带减速轮的脉冲当量的计算:螺距/(编码器脉冲分辨率乘减速比K)
脉冲当量计算例3:
角度值的脉冲当量:360°/(编码器脉冲分辨率乘减速比K)脉冲当量计算例4:
脉冲当量=πD(驱动轮的周长)/编码器分辨率
齿轮的直径计算方法:
齿顶圆的直径=(齿数Z+2)*模数
分度圆直径=齿数*模数
齿根圆直径=齿顶圆直径-(4.5X模数)
例如:M4 32齿
齿顶圆的直径:(32+2)*4=136mm
分度圆的直径mZ:32*4=128mm
分度圆的周长:πX128=401.92mm
齿根圆的直径:136-4.5*4=118mm
脉冲当量=πmZ(分度圆直径)/编码器分辨率
步进电机脉冲当量:
圈脉冲P=360°X细分倍数m/电机的步距角
1、
电子齿轮比:
2、
n为转速
现在是每分钟1465转,要达到每分钟3000转需要设定电子齿轮比。
nN为额定转速,Pm编码器分辨率,f为系统输出频率,电机转速提高后,脉冲当量也会发生变化。
会变大,使精度变小。