钻机顶驱系统背钳机构设计及仿真
TD2000_600型液压顶驱式钻机设计及应用

0 引 言
我 国 煤 矿 井 筒 冻 结 孔 施 工 、地 面 预 注 浆 孔 施 工 、 煤田地质勘探孔及反井导孔等钻孔施工中的钻机主 要为 TSJ-1000、TSJ-2000等转盘钻机,其结构简 单,市场保有量大,维 修 便 利,此 钻 机 转 盘 本 身 不 能 控 制 给 进 ,由 于 其 采 用 主 动 钻 杆 传 递 转 矩 ,只 能 进 行 单 根 钻 进 ,接 换 钻 杆 频 繁 ,施 工 效 率 低 。 由 于 不 接 钻 杆就无法进行钻井 液 循 环 和 钻 具 旋 转,所 以 在 遇 到 卡钻事故和下钻遇 到 缩 径 和 塌 孔 地 段 时,转 盘 钻 机 处理手段受到很大限制 。 [1-6] 转 盘 钻 机 靠 控 制 钻 具 吊重对钻 头 加 压,使 水 平 钻 孔 施 工 受 到 很 大 限 制。 由 于 转 盘 钻 机 基 本 采 用 人 工 操 作 ,自 动 化 程 度 低 ,工 人劳动强度大。目前我国在立井井筒地面预注浆钻 孔施工 深 度 已 超 过 1 000 m、冻 结 钻 孔 施 工 已 近 1 000m、全国煤 田 勘 探 经 过 几 十 年 的 工 作,距 地 面 深度1 500m 以 内 的 煤 层 基 本 勘 探 完 毕。 同 时,随 着煤层气开采力度 的 加 大,用 于 煤 层 气 开 采 以 及 瓦 斯抽放孔的钻机需求也 日 益 增 加 。 [7-8] 而 国 内 现 有 钻机虽然功能齐 全,但 结 构 尺 寸 过 大,价 格 昂 贵,难
收 稿 日 期 :2013-04-11;责 任 编 辑 :赵 瑞 基 金 项 目 :中 国 煤 炭 科 工 集 团 有 限 公 司 科 技 创 新 基 金 资 助 项 目 (2011MS015) 作 者 简 介 :邓 昀 (1977— ),男 ,重 庆 人 ,副 研 究 员 ,硕 士 。Tel:010-84263097,E-mail:denggreg@sina.com
顶驱结构及原理
顶驱结构及原理
顶驱结构
c.保护、转换及隔离接头。 3、安全阀驱动器 4、扭矩钳 5、倾斜吊环装置 管子处理装置向IDS钻井系统提供了两项基本功能; 1)起下93英尺长的钻杆立柱。 2)为在井架任何高度上连接和断开钻柱提供了高达 60000ft-lbs 的扭矩 管子处理装置能配成与各种钻杆接头连接。它包括一整体吊卡和VACRO专 用扭矩钳,还包括一安全阀遥控器和倾斜吊环驱动器。不使用时,保持静 止钻柱可以自由通过。起下钻和进行井下作业时,管子处理装置能自由旋 转360度,模拟标准大钩的作用。
顶驱结构及原理
顶驱结构
6、有延伸入口的现场谷风机冷却系统。
该系统向钻井电动机提供现场冷却空气。该系统由带有导管的标准型局部 鼓风机和一根向马达方向的延伸的软管组成,鼓风机上的导管能将进口安 装在大钩和游动滑车上。 C.PH-60型管子处理装置 管子处理装置包括 1、整体吊卡 2、安全阀(IBOPS) a.上IBOP安全阀 b.下IBOP安全阀
顶驱结构及原理
顶驱结构
3、整体水笼头总成
IDS水笼头作用归并到钻井装置,水龙头主止推轴承位于行星 行星齿轮下面的变速器中。水笼头中心管是一带法兰的锻件, 法兰位于主止推轴承的上方,以承受钻杆载荷。水笼头密封装 置安装在钻井电动机上端,由标准冲管、成套盘根装置及由壬 螺母构成。因此可以作为一个装置进行移动。标准冲管与轴衬 连接,轴衬穿过电动机轴、传动装置到达外部的水笼头中心管。 4、平衡系统 当钻井装置进行连接时,平衡装置可抵消IDS的重量,并为其 提供软着陆。液压缸总成把电动机壳与游动滑车连接在一起。 用IDS连接或卸开钻柱时,平衡系统避免了对管柱连接螺纹的 损坏,它提供的8-inch缓冲行程与大钩提供的缓冲相似。
顶驱结构及原理
简要分析顶部驱动装置的性能构造与使用特点
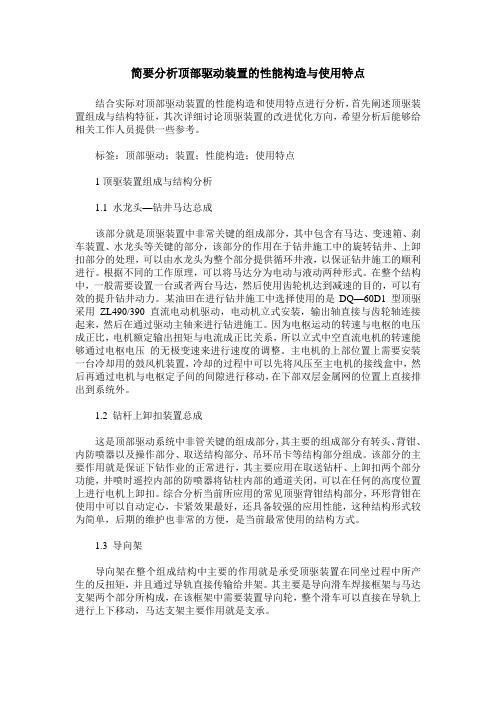
简要分析顶部驱动装置的性能构造与使用特点结合实际对顶部驱动装置的性能构造和使用特点进行分析,首先阐述顶驱装置组成与结构特征,其次详细讨论顶驱装置的改进优化方向,希望分析后能够给相关工作人员提供一些参考。
标签:顶部驱动;装置;性能构造;使用特点1顶驱装置组成与结构分析1.1 水龙头—钻井马达总成该部分就是顶驱装置中非常关键的组成部分,其中包含有马达、变速箱、刹车装置、水龙头等关键的部分,该部分的作用在于钻井施工中的旋转钻井、上卸扣部分的处理,可以由水龙头为整个部分提供循环井液,以保证钻井施工的顺利进行。
根据不同的工作原理,可以将马达分为电动与液动两种形式。
在整个结构中,一般需要设置一台或者两台马达,然后使用齿轮机达到减速的目的,可以有效的提升钻井动力。
某油田在进行钻井施工中选择使用的是DQ—60D1 型顶驱采用ZL490/390 直流电动机驱动,电动机立式安装,输出轴直接与齿轮轴连接起来,然后在通过驱动主轴来进行钻进施工。
因为电枢运动的转速与电枢的电压成正比,电机额定输出扭矩与电流成正比关系,所以立式中空直流电机的转速能够通过电枢电压的无极变速来进行速度的调整。
主电机的上部位置上需要安装一台冷却用的鼓风机装置,冷却的过程中可以先将风压至主电机的接线盒中,然后再通过电机与电枢定子间的间隙进行移动,在下部双层金属网的位置上直接排出到系统外。
1.2 钻杆上卸扣装置总成这是顶部驱动系统中非管关键的组成部分,其主要的组成部分有转头、背钳、内防喷器以及操作部分、取送结构部分、吊环吊卡等结构部分组成。
该部分的主要作用就是保证下钻作业的正常进行,其主要应用在取送钻杆、上卸扣两个部分功能,井喷时遥控内部的防喷器将钻柱内部的通道关闭,可以在任何的高度位置上进行电机上卸扣。
综合分析当前所应用的常见顶驱背钳结构部分,环形背钳在使用中可以自动定心,卡紧效果最好,还具备较强的应用性能,这种结构形式较为简单,后期的维护也非常的方便,是当前最常使用的结构方式。
石油工程机装备第四章顶驱钻井系统(新版11)2
如TDS-3S、TDS-9S型,平衡油缸的上端与游车(当不用 大钩时)连接,下端直接固定在水龙头提环上(参见图414)。
26
(4)平衡液压回路工作原理
该液压回路消耗的液压能很少,可用其它液压系统来
补油保压,不必单独加油泵。
平衡系统液压回路如图4-16所示。
上连大钩
导轨分段
连接 板 TDS-11SA 安装完毕的 导轨
万能平衡 横梁
19
Varco顶驱标准井厂 安装布置示意图
顶驱-变频房电缆长
321英尺,变频房-井
队电源电缆长100英尺
,保证变频房能够置于安
200英尺司钻房电缆
全区,且电缆沿井架固定
,无需悬空。
6x1 100‘英尺 跳接电缆 646MCM
3 x 100’ 电源电缆 646MCM
图4-11为吊环联接器。 作用:可由图4-8看出,它 通过吊环将下部吊卡与主 轴相连。
主轴穿过齿轮箱壳体, 又同整体水龙头相接。
旋转头 吊环联 接器
限扭器
图4-11 吊环联结及限扭器总成 9
旋转头 主轴 吊环倾 斜机构
扭矩 扳手 吊环
限扭器 吊环联 接器
吊环 吊卡
10
(4)吊环倾斜器
图4-12、图4-8所示
图4-13 650t旋转头总成
12
国产回转头
背钳装置、内防喷器 操纵机构、倾斜机构、 吊环吊卡是为起下钻 作业服务的,独立于 主轴运动。
回转头带动上卸扣装 置一起作顺时针、逆 时针转动,以便适应 抓取单根、接立根的 方位。
时代
回转头靠液马达带动齿轮 转动,由调速阀调节4~ 8r/min。
13
ZQ-100型钻杆动力钳背钳设计(全套图纸)

毕业设计说明书论文(全套CAD图纸) QQ 36396305摘要在人类的机械创新的不断进步,使机械代替了人。
以前在油田修井时或者下油管时,管与管连接时是用管钳来上扣和卸扣,现在使用这种液压钳,就给人类带来很多方便,使工作效率和安全系数提高,也减少了很多井口的工作人员,因此这是油田经常使用的卸管工具。
针对修井作业中人力上卸抽油杆螺纹效率低,劳动强度大,又不能保证不同规格抽油杆所要求的上扣扭矩等问题,研制了ZQ-100型液压抽油杆钳,这种抽油杆钳由主钳,手动换向阀,液压马达,底钳,弹簧吊筒和调节弹簧等组成,在设计中省掉了转速换挡机构,同时通过改变制动板上压簧螺栓的结构,解决了制动板减薄时颚板滚子爬坡力量不足这一技术难题,介绍了这种抽油杆钳的工作原理。
目前,国外钻杆动力钳的种类很多,而且产品性能及质量都相对稳定,特别是他们产品的体积与输出扭矩不会成比例变化,即使动力钳输出扭矩相当大时,其产品的体积也不会增加多少,因而适用于现场需要。
而国内产品还处在研发和改进阶段,产品性能及质量都有待进一步提高,国内产品的体积和重量都随输出扭矩的增大而增大,从而导致无法适用于某些大型钻管。
近10年来,中国国内生产动力钳有所增长,但相比国外我国动力钳结构复杂不方便使用与维护,使用期短等缺点,所以我国正大力发展动力钳设计改造,达到世界水平。
关键词:石油;机械创新;性能;转杆动力钳;研发改进;设计AbstractIn recent years, with continued rapid growth of our national economy, petroleum volume of consumption of our country increase year by year. The rank has already exceeded Japan, has become the second largest petroleum following U.S.A. and consumed the country. On being pole required to pump oil, pump the oil pole pincers after developing the hydraulic pressure of Model ZQ-100, this kind pumps the oil pole pincers by the main pincers , the manual reversing valve, hydraulic motor, bottom pincers , the spring hangs tube and regulates spring ,etc. to make up , save rotational speed shift gears organization , at the same time through change , apply the brake board pigeonhole reed structure of bolt in design, solve , apply the brake board jaw board roll sub climbing strength insufficient technological difficult problem this reduce thin ,, recommend this kind pump oil pole operation principle of pincers! Main technical parameter and experimental situation in the room, employ the result to indicate live, adopt Model ZQ-100 hydraulic pressure pump oil pole pincers can reduce , release oil pole take off number of times of spiking greatly, improve and build the quality of the well and build the pace of the well. Let out difficult to avoid and fluid have a sure one but compression, so, transmission than unable and invariable, suitable for transmission than requiring strict occasion. Energy caused to leak lose, hydraulic transmission main energy is lost, in addition resistance and machinery that fluid receive among pipeline rub etc., cause sure energy to lose, cause the efficiency of hydraulic transmission to be relatively low. The viscosity of the fluid changes with temperature, as the warm change of oil, will influence the working performance of the actuator directly. In addition, have greater difficulties to adopt hydraulic transmission under the low-temperature condition or high-temperature condition. Fluid through air, will produce noise is apt to cause vibration, the ones that influenced transmission are steady. It is relatively difficult to maintain, the work load is large. At the trouble of producing, trouble reason difficult to look for, get rid of getting difficult through design, optimize, reduce, shoulder, influence as hydraulic system. At present, the kind of the motive force pincers of foreign drilling rod is numerous, and properties of product and quality are all relatively stable, especially they the products one volume and output torsion can changes proportional, even if power, when毕业设计说明书论文(全套CAD图纸) QQ 36396305pincers quite heavy to export torsion, volume of product its how much does it increase either, suitable for needing at the scene. The domestic products are still at the stage of researching and developing and improving, properties of product and quality all remain to further improve, volume and weight of the domestic products all export the increase of the torsion to increase at the same time, thus it is unable to be suitable for some to cause and bore managing large-scaly. The past 10 years, produce power pincers increase to some extent, compare foreign of our country power pincers structure complicated to use and maintain while being inconvenient in China, the shortcoming such as being short of service time, so our country is developing the motive force pincers to design and transform in a more cost-effective manner, reach the world standard. Transfer to ZQ100 type to pole power pincers carry pincers go on, design , realize, it is safe to apply the brake, it is reliable and durable. Make the hydraulic pressure control and drive the rack to clamp the steel tube effectively.Key words: Petroleum; Machinery innovates; Performance ; Transfer to the pole motive force pincers ; Research and develop and improve; Design目录1 绪论 11.1液压动力钳概述 (6)1.1.1 液压动力钳的发展状况 61.1.2 液压动力钳的应用71.2液压动力钳的结构及工作原理 (8)1.2.1 液压动力钳的结构及特点81.2.2 液压动力钳的工作原理91.3液压动力钳技术参数及特点 (10)1.3.1 ZQ-100型液压动力钳的技术参数101.3.2 液压动力钳的技术特点101.4液压动力钳的的操作说明 (11)1.4.1 液压动力钳的的安装111.4.2 液压动力钳的操作121.4.3 液压动力钳的维护与润滑121.4.4 液压动力钳的常见故障及排除方法132 ZQ-100型钻杆动力钳的背钳总体设计142.1ZQ-100型钻杆动力钳的背钳概述 (14)2.2ZQ-100型钻杆动力钳的背钳结构设计 (14)2.3背钳结构设计中的问题 (15)3 ZQ-100型钻杆动力钳的背钳液压缸设计173.1液压缸的类型和结构形式选择 (17)3.2液压缸基本参数确定 (17)3.2.1 液压缸工作负载及工作压力183.2.2 缸筒内径及柱塞杆直径183.2.3 液压缸最大工作行程和最小导向长度21毕业设计说明书论文(全套CAD图纸) QQ 363963053.3液压缸的强度及刚度校核 (22)3.3.1 缸筒壁厚的校核及外径计算223.3.2 液压缸柱塞杆强度验算233.4液压缸稳定性验算 (23)3.5液压缸的安装试验与维护 (24)4 ZQ-100型杆动力钳的背钳传动设计264.1背钳传动概述 (26)4.2背钳传动设计 (26)4.3轴的设计 (28)4.3.1 轴的结构设计284.3.2 轴的强度计算284.3.3 轴的刚度计算284.3.4 轴的稳定性324.4齿轮系的设计 (32)4.4.1 齿轮系的传动比324.4.2 齿轮的强度计算335 结论506 技术经济分析44致谢 52参考文献 53附录A译文55附录B英文文献611 绪论在人类的机械创新的不断进步,使机械代替了人。
顶驱介绍 机械部分.PPT
倾斜机构
侧开背钳 导入环
吊卡 管子处理装置(侧挂背钳) 管子处理装置(侧挂背钳)
中国石油
北石顶驱技术特点
• 采用先进的交流变频驱动技术,双主电机一对一驱 采用先进的交流变频驱动技术, 采用独立编码器控制,既可以双电机工作, 动,采用独立编码器控制,既可以双电机工作,也可 以单电机独立工作。 以单电机独立工作。 • 电机操作模式可以在操作台上通过旋钮选择,不需 电机操作模式可以在操作台上通过旋钮选择, 要修改程序或者参数,简单方便。 要修改程序或者参数,简单方便。
中国石油
钻柱丝扣防送装置
上牙嵌体
牙板
下牙嵌体
螺栓
丝扣防松机构 丝扣防松机构
中国石油
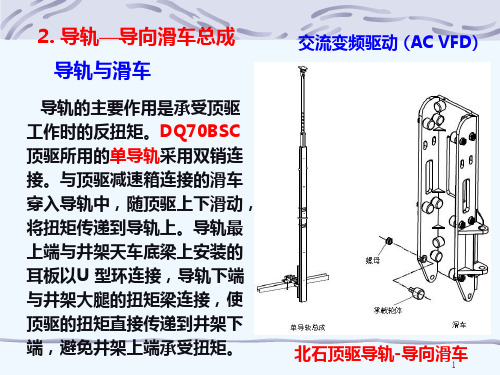
导轨与小车
顶顶 外内内 螺螺 内内内 内内 轴 轮轮
单导轨总成
滑动小车
中国石油
北石顶驱与国外同类顶驱对比
中国石油
北石顶驱型号与国外型号对比 北石顶驱 VARCO CANRIG National TESCO
DQ70BS TDS-11SA 1265E TD500PAC 500ECI
遥控内防喷器控制机构侧挂式背钳用
中国石油
倾斜机构
由倾斜油缸推动吊环吊卡作两个方向 的运动,可实现前倾、后摆, 的运动,可实现前倾、后摆,并具有自动 复位功能使吊环吊卡自动复位到中位。 复位功能使吊环吊卡自动复位到中位。前 倾可伸向鼠洞或二层台抓放钻杆; 倾可伸向鼠洞或二层台抓放钻杆;后摆的 作用是使吊卡回位, 作用是使吊卡回位,最大后倾时使吊卡离 钻台面更远,可充分利用钻柱进行钻进。 钻台面更远,可充分利用钻柱进行钻进。 前倾角度为30° 后倾角度为50° 前倾角度为 °,后倾角度为 °。摆动 的水平距离与吊环长度有关。 的水平距离与吊环长度有关。
顶驱介绍机械部分

本体
导轨
液压源
DQ70BS顶驱装置
电控系统
中国石油
阀组 热交换器
电机
减速箱
电机冷却系统 刹车装置 提环 冲管总成 管线支座
动力水龙头
中国石油
旋转头 IBOP
环形背钳
倾斜机构 导入环
吊卡 管子处理装置(环形背钳)
中国石油
旋转头
IBOP
侧开背钳
倾斜机构 导入环
吊卡 管子处理装置(侧挂背钳)
按国际化运作模式制造北石顶驱
中国石油
中国智慧 加全球最佳资源
打造北石顶驱
中国石油
北石顶驱技术特点
中国石油
北石顶驱型号说明
DQ
70 BS H/C
背钳样式 H:环形背钳 C:侧挂式背钳
驱动方式:
B: 交流变频驱动 BS:交流变频驱动、双电机 Y: 液压驱动
名义钻深(7000m/4500kN) 顶部驱动钻井装置(DingQu)
• 采用PLC可编程控制器进行全面智能控制,具有安全 互锁、监控等多项功能,保证系统工作安全可靠;
• 采用先进的ProfiBus现场总线控制技术,光缆传输, 安装维护简单,可靠性高,抗干扰能力强;
• 配置工控计算机,可以对运行参数、报警信息等进行 监测和记录,同时具有自诊断功能,配合WINCC系统 可快速查找故障。
螺栓
套筒
曲柄
盖板
螺栓
遥控内防喷器控制机构侧挂式背钳用
中国石油
倾斜机构
由倾斜油缸推动吊环吊卡作两个方向 的运动,可实现前倾、后摆,并具有自动 复位功能使吊环吊卡自动复位到中位。前 倾可伸向鼠洞或二层台抓放钻杆;后摆的 作用是使吊卡回位,最大后倾时使吊卡离 钻台面更远,可充分利用钻柱进行钻进。 前倾角度为30°,后倾角度为50°。摆动 的水平距离与吊环长度有关。
顶部驱动钻井装置.ppt

国外顶驱的发展概况
CANRIG公司
自91年开始生产第一台顶驱以来, Canrig公司已销售了260多台电顶驱,其 中包括交流变频顶驱30多台,主要品种:
直流电顶驱-单速: 6027E、8035E、 1050E、1165E
直流电顶驱-双速: 6027E-2SP、 6017E-2SP-HELI、 1050E-2SP、1165E-2
顶部驱动钻井装置
问题
一.什么是顶驱?顶驱是由几大系统组 成的?
二.与常规钻井设备相比,顶驱的优越 性在哪?
三.你认为顶驱还需有哪些方面的改进?
2
讲义提纲
顶驱概述 顶驱现场应用的优越性 顶驱钻井装置与钻井常规设备的比较 顶驱排除故障的一般原则 顶驱作业的现场应用 顶驱装置的改进方向
3Байду номын сангаас
概述
• 顶部驱动钻井装置是当今石油钻井的前沿技术与装备,是近代 钻井装备的三大技术成果(交直流变频电驱系统和井下钻头增压 系统)之一。 • 顶部驱动钻井系统是20世纪末期,美国、法国、挪威等国家研 制应用的一种新型的钻井系统。现在已成为石油钻井行业的标准 产品。它适用性极广,从2000米到9000米的井深都可以使用顶部 驱动钻井系统;从世界钻井机械的发展趋势上看,它符合21世纪 钻井自动化的历史潮流。现在,我国赴国外打井的队伍,如果没 有安装该系统将不允许在投标竞争中中标,由此可见,顶部驱动 钻井系统已经到了非用不可的地步。
14
国外顶驱的发展概况
SOILMEC HTD200型液压顶驱
现有数量:1台 额定载荷:200T 额定功率:420HP 重量:6.5T 作业空间4.45m 最大钻井扭矩:35.25KN.M 最大上扣扭矩:44KN.M 最大卸扣扭矩:59.25KN.M 最高转速:200rpm 外形尺寸(宽x厚x高):0.85mx1.32mx4.45m 动力单元 柴油机型号:CATERPILLAR 3408 功率:420HP 重量:8.25T 长度:6100 mm 宽度:1700 mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国外相比无论是在结构上还是可靠性方面都还存在很大 2 背钳的结构设计
的差距.钻机顶驱系统的重要组成部分背钳主要用来完
根据背钳的功能要求,对背钳机构进行设计.结构如图
成钻杆的上卸扣作业,此外也可以利用背钳更换保护接 1 所示.侧挂式背钳主要由前扶正环、后扶正环、导向环、
头和内防喷器.顶驱在进行上卸扣作业时,背钳夹紧钻杆, 背钳本体背钳支架、背钳托座、弹簧等组成.
图 5 钳头位置变化曲线 如图 6 所示为右钳头速度变化曲线,在背钳夹紧的过 程中,钳头的速度先平稳增加,然后又平稳下滑,当时间到 2.5 秒时背钳的运动速度达到最大,且背钳装置钳头的最大运 动速度为 6 mm/s.右钳头速度变化曲线变化稳定,满足背钳 设计要求.
部分:右背钳、左背钳、钻杆、液压缸、浮动安装座,每一
clamp mechanism in process of back clamp clamping and loosing .By the curves ,we can explore preliminary the motion law of back clamp .
Key words: Top Drive Drilling System;Back-up tong;Kinematics analysis
背钳的左钳牙和右钳牙很难做到同时夹紧钻杆 ,且左右
基金项目:国家深部探测技术与实验研究专项资助项目(SinoProbe-09)
作者简介:于萍,(1963-),女,教授,E-mail:yp@
应的约束运动副,这些运动副可以使被约束构件间具有一 定的运动关系.从而使模型中各独立的部件相互联系在一 起,按照设计的运动轨迹实现运动.使用 ADAMS/view 中的 函数编辑器定义相应的背钳运动.背钳机构的仿真模型如 下图 3.
图 1 侧挂式背钳的结构示意图
如图 2 所示,当液压油进入无杆腔,液压缸缸筒与浮 动安装座同时移动,液压缸左移,浮动安装座右移,夹紧 钻杆.当液压油进入有杆腔,液压缸缸筒向右移动,带动 右钳头远离钻杆,于此同时浮动安装座左移,左钳头远离 钻杆.当背钳不工作时 ,调整背钳液压缸内部压力 ,使压 力保持恒定,使背钳钳头处于浮动状态,不影响顶驱装置 正常工作[2].
轴方向的位置变化比较明显 ,X 轴方向位置没有任何变 时加速度为零,然后在很少的时间内急速上升,当加速度达
化,在 Y 轴方向,位置曲线只有很微小的变化,这是由于某 些惯性载荷或者震动造成的.Z 轴方向在 0-5 秒的过程中 大约运动了大约 20mm 距离.背钳装置夹紧过程的前阶 段和后阶段位移变化比较小,在整个夹紧过程中位移变 化比较平稳.
1 前言
夹紧力相同.夹紧力不均衡就会造成钳牙的磨损和钻杆的
顶部驱动钻井装置已经成为二十一世纪钻井技术的 重要装备之一,安装了顶部驱动的钻机比传统的钻井装 置更加可靠、高效和安全.目前,国内顶部驱动钻井装备与
划伤,减少钻杆的使用寿命;顶驱钻机的工作地点环境恶劣、 工作强度大,背钳机构的故障率很高,这就急需要提高背钳 机构的工作可靠性。
(1)
在约束方程中 tn (任意时刻)位置的计算,能够运用约束
( ) 方程的迭代法获得: Φqj∆q j + Φ q j , tn = 0
( ∆q j = q j+1 − q j ,第 j 次迭代)
(2)
任意时刻 tn 的速度和加速度都可以运用数值方法
图 4 钳头 Z 轴位置变化曲线
中的线性方程求解,ADAMS 软件中有两种求解方法—
HARWELL 法和 CALAHAN 法,前者可以处理冗余约束
问题,而后者不能,但后者比较快捷.
q̇ = −Φq−1Φt
(3)
( ) q̇̇ =
−Φ
q
−1
⎡ ⎣
Φ q q̇
q
q̇
+
2Φ
qt
q̇
+
Φtt
⎤ ⎦
(4)
3.3 背钳机构的仿真曲线 运动学仿真分析就是根据机械系统的实际工作情
况,对背钳装置上卸扣过程中所关心的部件的位置、加速 度和速度进行仿真分析,获得机构运动曲线,并检验其正 确性.在整个背钳装置运动的过程中,可以分为五个运动
个运动部件都发生了两次运动过程[6].
本文只对背钳装置右钳头的位置、速度和加速度的
变化曲线进行分析.
右背钳夹紧过程
如图 4 和 5 图所示为右钳头 Z 轴位置变化曲线和右 钳头总体位置变化曲线图,从上图中可以清晰的看出,Z
图 6 钳头速度变化曲线 如图 7 所示为右钳头加速度变化曲线,背钳钳头刚夹紧
Mechanism Design and Analysis for Back-up tong of Top Drive
Drilling System
YU Ping1,ZHANG Peng2,XIAO Zhi-hui3 (1.Mechanical Science and Engineering Institute of Jilin University, Changchun 130025
the working principle of the back clamp and the back clamp clamping mechanism model is established by the CATIA.
this paper also improves the kinematics and on the basis of it ,dynamics simulation analysis of the back clamp system is performed by using the ADAMS software,resulting the moving parts’s speed and acceleration motion curve of back
图 8 钳头位置变化曲线
图 9 钳头速度和加速度变化曲线
4 结论
本文建立了背钳机构的仿真模型,使用 ADAMS 中 的 COSMOS/motion 对背钳系统进行了运动学仿真,得到
液压缸活塞杆与浮动安装座采用的是固定连接,四 个连接销钉与液压缸刚性连接在一起,浮动安装座随着 活塞杆的移动而移动,液压油通过夹紧活塞内部的通道 进入液压缸.液压缸的缸筒与浮动安装座可以产生相对 位移,浮动安装座可以在背钳外壳内部产生位移.在设计 制造过程中,需要尽量保证与左右钳头固定连接的运动 部分质量相等,保证运动的同时性.
Abstract: This paper briefly introduces the basic structure composition of the top drive drilling system and analyzes
the back clamp in the role of the top drive system ,along with its basic structure. It gives a further interpretation on
了背钳钳头的速度、加速度变化曲线.设计的背钳结构更加
合理可靠,不仅解决了磨钳牙与钻杆的现象,而且降低了制
造Hale Waihona Puke 本,操作维修方便.参考文献 [1] 李 昂 , 顶 部 驱 动 钻 井 装 置 背 钳 [P]: 中 国,200710176655.4,2009-05-06. [2] 刘广华.顶部驱动钻井装置操作指南[M].石油工业出版 社,2010. [3] A Varco International Company. TDS-11SA top drive
3 背钳机构的运动学仿真
3.1 背钳机构的仿真模型 根据系统模型的实际的运动情况 ,在构件间建立相
图 3 背钳机构虚拟仿真模型
3.2 背钳机构的运动学计算 研究机械系统的速度、加速度、位置以及约束力是运
动 学仿真 的主要 目标 ,因 此运动 学方程 [4]的 求解只 需要求 解约束方程:
Φ(q,tn ) = 0
到最大(约 4.5 mm / s2 )以后加速度开始平稳变化,到 2.5
秒时加速度为 0,之后又增加,钳头的加速度在 2.5 秒前后呈 现对称性.如图所示的背钳钳头在刚开始运动时,液压活塞 杆的惯性载荷比较大,对液压缸的内部冲击也比较大.
图 7 钳头加速度变化曲线
右背钳松开过程 如图 8 所示为右钳头位置变化曲线,在 0-5 秒的过程 中,背钳右钳头在松开钻杆时的位置曲线与夹紧钻杆时 的位置曲线变化方向相反,其他都基本相同.背钳装置整 个运动过程中位移变化比较平稳. 如图 9 所示为右钳头速度和加速度变化曲线,在 0-5 秒的过程中右钳头速度和加速度变化曲线与夹紧钻杆时 的曲线变化方向相反,其他都基本相同.2.5 秒之前加速度 为正值,2.5 秒之后加速度为负值,速度先升高在降低,变 化平稳.加速度在很短的时间内快速增加 ,快速减少可能 会给背钳液压缸造成一定程度的冲击.
system service manual[J]. Houston: Varco BJ, 1995. [4] 沈泽俊,白光利等.DQ70BS 交流变频顶部驱动钻井装 置[J].石油机械,2005,33(2)39-41. [5] 刘常福,宋开利,张振海.自动化液压动力大钳[J].石油 机械,2002,30(9):61-62. [6] 陈立平等.机械系统动力学分析及 ADAMS 应用教程[M]. 清华大学出版社.2001:95- 111.
2 .Mechanical Science and Engineering Institute of Jilin University, Changchun 130025 3.Mechanical Science and Engineering Institute of Jilin University, Changchun 130025 4.Mechanical Science and Engineering Institute of Jilin University, Changchun 130025)