相机坐标系变换
小杨说事-基于halcon的多相机坐标系统一原理个人理解

小杨说事-基于halcon的多相机坐标系统一原理个人理解
首先,多相机坐标系统是指使用多个相机来进行三维空间的测量和定位,以实现对目标物体在三维空间中的位置和姿态的准确识别和定位。
在基于Halcon的多相机坐标系统中,首先需要将多个相机通
过标定来获取相机内外参数,包括相机的焦距、畸变系数等内参数,以及相机之间的相对位置和姿态(外参数)。
标定过程一般会使用标定板或者特定的物体进行拍摄,通过计算和估计的方法来求解相机的参数。
然后,在实际运行时,通过多个相机同时拍摄目标物体,在图像中利用特征点或者标志物来进行匹配和定位。
通过相机的内外参数,可以将图像中的像素点转换为世界坐标系中的三维点。
在进行多相机的坐标转换时,需首先建立一个参考相机,将参考相机的坐标系定义为世界坐标系。
接下来,通过计算和测量,可以计算出每个相机的相对位置和姿态,以及相机光学中心与世界坐标系之间的变换矩阵。
根据变换矩阵和相机的内外参数,可以将每个相机的图像像素点转换为世界坐标系中的三维点。
最后,通过三维坐标点的计算和处理,可以实现目标物体的定位和姿态的准确识别和追踪。
总的来说,基于Halcon的多相机坐标系统利用多个相机来进
行三维空间的测量和定位,通过标定获取相机参数,利用特征匹配和计算来实现对目标物体位置和姿态的准确识别和定位。
系统具有较高的精度和稳定性,可以广泛应用于机器视觉领域中的三维重建、定位和追踪等应用。
世界坐标系到相机坐标系变换矩阵 欧拉角计算

世界坐标系到相机坐标系变换矩阵及欧拉角计算一、概述在计算机视觉和计算机图形学领域中,世界坐标系到相机坐标系变换矩阵和欧拉角计算是非常重要且常用的技术。
本文将通过具体的介绍和示例,详细讨论世界坐标系到相机坐标系变换矩阵及欧拉角的计算方法。
二、世界坐标系和相机坐标系简介1. 世界坐标系世界坐标系是指在三维空间中描述物体位置和方向的坐标系。
它通常是一个固定的参考框架,用于描述物体在空间中的位置和姿态。
2. 相机坐标系相机坐标系是相机传感器坐标系中的一个坐标系,它描述了相机的位置和方向。
相机坐标系通常位于相机传感器中心,其坐标轴与传感器平面平行。
三、世界坐标系到相机坐标系变换矩阵的推导1. 坐标变换原理当世界坐标系中的物体经过相机的观测时,需要将物体的坐标转换到相机坐标系中。
这个转换过程可以通过一个变换矩阵来实现,该矩阵包括平移、旋转和缩放等变换操作。
2. 变换矩阵的计算设世界坐标系下的一个物体点坐标为Pw = (Xw, Yw, Zw),相机坐标系下的坐标为Pc = (Xc, Yc, Zc)。
那么Pc与Pw之间的变换关系可以表示为:Pc = T * R * Pw其中T为平移矩阵,R为旋转矩阵。
根据相机的内参矩阵和外参矩阵,可以得到T和R的具体数值,进而得到世界坐标系到相机坐标系的变换矩阵。
四、欧拉角的计算方法1. 欧拉角的定义欧拉角是描述物体姿态的一种方式,它由三个角度组成,通常分别表示绕三个坐标轴的旋转角度。
2. 欧拉角的计算在计算机视觉中,通常使用旋转矩阵或四元数来表示物体的旋转姿态。
而将旋转矩阵或四元数转换为欧拉角则是一个常见的需求。
欧拉角的计算方法有多种,常见的包括将旋转矩阵转换为欧拉角、将四元数转换为欧拉角等。
五、示例分析以下将通过一个具体的示例来演示世界坐标系到相机坐标系的变换矩阵和欧拉角的计算方法。
假设世界坐标系中的一个物体点坐标为Pw = (1, 1, 1),相机坐标系的内参矩阵为K,外参矩阵为[R|T]。
世界坐标系和相机坐标系,图像坐标系的关系

、四个坐标系简介和转换相机模型为以后一切标定算法的关键,只有这边有相当透彻的理解,对以后的标定算法才能有更好的理解。
本人研究了好长时间,几乎每天都重复看几遍,最终才会明白其推导过程。
我觉得首先我们要理解相机模型中的四个平面坐标系的关系:像素平面坐标系(u,v )、像平面坐标系(图像物理坐标第(x,y )、相机坐标系(Xc,Yc,Zc )和世界坐标系(Xw,Yw,Zw),在每一篇介绍相机模型的文章中都有介绍。
我刚开始理解时,看着那一堆的公式十分的头晕,我相信很多初学者和我一样,但仔细想想,只不过是,我们假设了一些参数,使四个坐标系之间的坐标联系起来,这样我们就可以从拍摄的图片上一个点坐标一路反推出世界中的那个点的坐标,这样就达到了我们的目的,三维重建。
而那些我们假设的参数,就是我们要标定的内外参数。
1、像素坐标与像平面坐标系之间的关系确定他们的关系之前,我们可以假设每一个像素在u轴和v轴方向上的物理尺寸为dx和dy。
仔细看下他们的模型可以推出以下公式(这个还是比较好理解的):解释:1、dx,dy,u0,v0 其实都是我们假设出来的参数,dxdy 表示感光芯片上像素的实际大小,是连接像素坐标系和真实尺寸坐标系的,u0,v0 是图像平面中心,最终是要我们求的内外参数。
得出这个公式后我们可以运用线性代数的知识把方程用矩阵形式表示:当然我们也可以用另一种矩阵形式表示:2、相机坐标系与世界坐标系之间的关系这两个坐标系之间的关系我们可以旋转矩阵R 和平移矩阵T 来得到以下关系:公式4解释:1、在这个公式中,R为3*3矩阵,T为3*1 , 0 为(0, 0, 0),简化用Lw表示后为4*4矩阵。
3、成像投影关系(相机坐标系与像平面坐标系)在相机模型中我们可以得到以下公式:公式5解释:1、同样我们用矩阵形式表示:公式64、得到公式而我们可以将以上公式综合一下就可以得到:因此,内参数矩阵可以表示为:=外参矩阵可以表示为:,由旋转矩阵R 和平移向量T 组成当然在好多资料上都有这种做法:上图中表示的情况是像素坐标系和图像物理坐标系的两个坐标轴不是平行的关系,像素坐标系的两个坐标轴也不是垂直90°的关系,而图像物理坐标系的两个坐标轴是垂直关系。
计算相机坐标系到机械臂末端坐标系的齐次变换矩阵

相机坐标系到机械臂末端坐标系的齐次变换矩阵是机器视觉和工业机器人领域中一个非常重要的概念。
对于工业领域的自动化生产,机械臂和相机之间的精确配准是至关重要的,而齐次变换矩阵正是用来描述相机坐标系到机械臂末端坐标系之间的关系的。
本篇文章将深入探讨相机坐标系到机械臂末端坐标系的齐次变换矩阵的计算方法,并且将详细介绍该计算方法的原理和实际应用。
一、齐次变换矩阵的概念和基本原理齐次变换矩阵是一种用来描述坐标系之间关系的数学工具,它可以将一个坐标系中的点映射到另一个坐标系中去。
在工业机器人和机器视觉系统中,我们常常需要将相机坐标系中的点映射到机械臂末端坐标系中,这就需要使用到齐次变换矩阵。
齐次变换矩阵的基本形式如下所示:\[ T = \begin{bmatrix} R & t \\ 0 & 1 \end{bmatrix} \]其中,\[R\]为旋转矩阵,\[t\]为平移向量。
齐次变换矩阵可以将一个点的坐标\[P\]从相机坐标系变换到机械臂末端坐标系:\[ P' = T \times P \]二、计算相机坐标系到机械臂末端坐标系的齐次变换矩阵计算相机坐标系到机械臂末端坐标系的齐次变换矩阵需要以下步骤:1. 确定相机坐标系和机械臂末端坐标系的原点需要确定相机坐标系和机械臂末端坐标系的原点位置。
这两个坐标系的原点通常是相机的光学中心和机械臂末端执行器的中心点。
确定了原点位置之后,我们可以将相机坐标系和机械臂末端坐标系的坐标系原点重合。
2. 计算旋转矩阵接下来,需要计算相机坐标系到机械臂末端坐标系的旋转矩阵。
旋转矩阵描述了两个坐标系之间的旋转关系。
在实际应用中,可以通过标定相机和机械臂的姿态来获取旋转矩阵。
3. 计算平移向量除了旋转矩阵之外,还需要计算相机坐标系到机械臂末端坐标系的平移向量。
平移向量描述了两个坐标系之间的平移关系。
平移向量可以通过相机和机械臂的空间位置信息来计算得到。
4. 组合旋转矩阵和平移向量将计算得到的旋转矩阵和平移向量组合在一起,就得到了相机坐标系到机械臂末端坐标系的齐次变换矩阵。
相机坐标系和机器人坐标系变换关系

相机坐标系和机器人坐标系变换关系1. 引言1.1 引言相机坐标系和机器人坐标系是机器人视觉和定位领域中的重要概念。
相机坐标系是用来描述相机的位置和姿态的坐标系,而机器人坐标系则是用来描述机器人的位置和姿态的坐标系。
在机器人的视觉应用中,通常需要将相机坐标系和机器人坐标系之间进行变换,以实现视觉数据与机器人控制系统之间的统一。
在本文中,我们将首先介绍相机坐标系和机器人坐标系的基本概念,包括坐标系的定义和表示方式。
然后我们将详细讨论相机坐标系到机器人坐标系的变换方法,包括平移和旋转矩阵的计算以及坐标变换的实现步骤。
接着我们将介绍机器人坐标系到相机坐标系的反向变换方法,以及如何将机器人的位置和姿态信息转换为相机的像素坐标。
我们将通过一个应用案例来说明相机坐标系和机器人坐标系变换方法在机器人视觉系统中的实际应用。
通过本文的学习,读者将能够更好地理解和应用相机坐标系和机器人坐标系之间的变换关系,从而提高机器人视觉系统的定位和跟踪性能。
【2000字】2. 正文2.1 相机坐标系与机器人坐标系简介相机坐标系与机器人坐标系在机器人视觉领域中扮演着重要的角色,它们为机器人在空间中的定位和导航提供了关键的参考。
相机坐标系通常是以相机的光学中心为原点,镜头光轴为Z轴的正方向,相机的视场中心为X轴的正方向,Y轴则与X、Z轴形成右手坐标系。
而机器人坐标系则可以根据机器人的结构和运动方式来确定,一般是以机器人的基准点为原点,并且定义好X、Y、Z轴的方向。
相机坐标系和机器人坐标系之间的变换是机器人视觉系统中的重要问题。
在机器人执行任务时,需要将相机获取的图像信息与机器人在空间中的位置相对应起来。
我们需要进行坐标系的变换。
在进行相机坐标系到机器人坐标系的变换时,我们需要考虑到相机姿态的表示方式、相机参数的校准、机器人基准点与相机光学中心之间的距离等因素。
通过适当的转换矩阵,我们可以将相机坐标系中的坐标点映射到机器人坐标系中,从而实现视觉信息与机器人运动的对应。
orb-slam3中采用的坐标系

orb-slam3中采用的坐标系ORB-SLAM3是一种基于特征点的视觉里程计(Visual Odometry)算法,用于实现实时的相机定位与三维建图。
在ORB-SLAM3中,使用了多个坐标系来描述相机的位姿和场景的几何结构。
本文将对ORB-SLAM3中使用的坐标系进行详细介绍。
1. 相机坐标系(Camera Coordinate System)相机坐标系是ORB-SLAM3中最基本的坐标系,通常用来表示相机的位姿和观测到的特征点的三维坐标。
相机坐标系以相机光心为原点,相机光轴为Z轴正方向,图像平面的水平方向为X轴正方向,垂直方向为Y轴正方向。
相机坐标系的X轴与图像平面的Y轴相交,构成一个右手坐标系。
2. 世界坐标系(World Coordinate System)世界坐标系用来表示场景的三维结构,以及相机在场景中的位姿。
世界坐标系的原点可以任意选择,通常选取某个特定的地点或者某个特征点的位置作为原点。
世界坐标系的X轴、Y轴、Z轴分别与地面上的某个固定方向对齐,构成一个右手坐标系。
3. 参考帧坐标系(Reference Frame Coordinate System)ORB-SLAM3中使用参考帧坐标系来描述相邻帧之间的位姿关系。
参考帧坐标系的原点与相机光心重合,参考帧坐标系的X轴、Y轴、Z 轴与相机坐标系的X轴、Y轴、Z轴重合。
通过计算参考帧与当前帧之间的相对位姿变换,可以得到相机在参考帧坐标系下的位姿。
4. 地图坐标系(Map Coordinate System)地图坐标系用来表示ORB-SLAM3构建的三维地图。
地图坐标系的原点通常与世界坐标系的原点重合,地图坐标系的X轴、Y轴、Z轴与世界坐标系的X轴、Y轴、Z轴重合。
地图坐标系可以用来表示场景中各个特征点的三维坐标,以及相机在地图中的位姿。
5. 局部地图坐标系(Local Map Coordinate System)局部地图坐标系用来表示ORB-SLAM3中的局部地图,即相机周围一定范围内的地图。
0世界坐标系到相机坐标系的转换(3D物体到2D图像)
〇.各种坐标系及其存在的原因:要谈坐标系变换,那么坐标系有哪些呢?依次有:物体坐标系,世界坐标系,相机坐标系,投影坐标系以及屏幕坐标系.我要讨论的就是这些坐标系间的转换。
这些坐标系不是凭空而来,他们都是为了完成计算机3D图形学最最最基本的目标而出现.计算机3D图形学最最最基本的目标就是:将构建好的3D物体显示在2D屏幕坐标上.初看好像就是将最初的物体坐标系转换到屏幕坐标系就可以了呀,为什么多出了世界坐标系,相机坐标系,投影坐标系。
这是因为:在一个大世界里有多个物体,而每个物体都有自己的坐标系,如何表述这些物体间相对的关系,这就多出了世界坐标系;如果只需要看到这个世界其中一部分,这就多出了相机坐标系;至于投影坐标系那是因为直接将3D坐标转换为屏幕坐标是非常复杂的(因为它们不仅维度不同,度量不同(屏幕坐标一般都是像素为单位,3D空间中我们可以现实世界的米,厘米为单位),XY的方向也不同,在2D空间时还要进行坐标系变换),所以先将3D坐标降维到2D坐标,然后2D坐标转换到屏幕坐标。
对于整个“如何将3D物体投射并显示在2D屏幕上”这一过程而言,坐标系转换的顺序为:物体坐标系—>世界坐标系—>相机坐标系—>投影坐标系—>图像(像素)坐标系编号设为a. b. c. d. e当然,本篇的目的是说明如何将3D物体投射并显示在2D屏幕上,且难点也在于此(即b,c,d,e过程)。
a到b的过程不在本文讨论之内,不再赘述。
如果很在意知识结构的完整性,请参考/shanhaobo/articles/1065380.html该篇a.b过程十分详细。
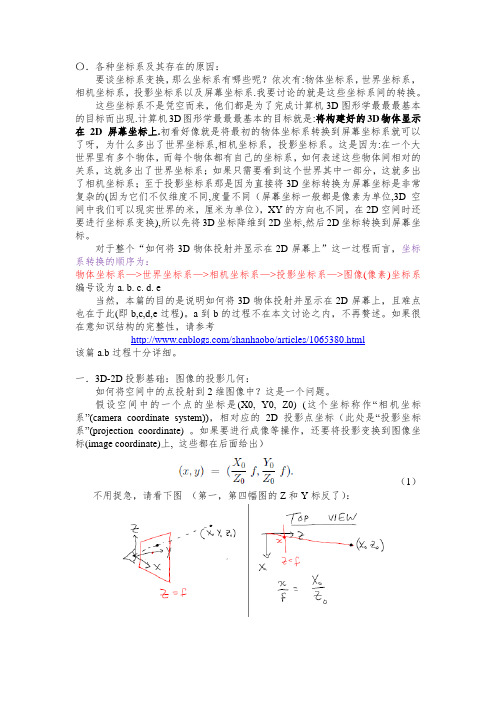
一.3D-2D投影基础:图像的投影几何:如何将空间中的点投射到2维图像中?这是一个问题。
假设空间中的一个点的坐标是(X0, Y0, Z0) (这个坐标称作“相机坐标系”(camera coordinate system)),相对应的2D投影点坐标(此处是“投影坐标系”(projection coordinate) 。
相机标定(Cameracalibration)

相机标定(Cameracalibration )简单介绍摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程。
也就是求终于的投影矩阵 的过程,以下相关的部分主要參考UIUC 的计算机视觉的课件(⽹址)。
基本的坐标系:世界坐标系(world coordinate system)。
相机坐标系(camera coordinate system);图像坐标系(image coordinate system);⼀般来说,标定的过程分为两个部分:第⼀步是从世界坐标系转换为相机坐标系,这⼀步是三维点到三维点的转换。
包含 , (相机外參)等參数;第⼆部是从相机坐标系转为图像坐标系。
这⼀步是三维点到⼆维点的转换,包含 (相机内參)等參数;相机坐标系 转换到 图像坐标系坐标系介绍如上图所看到的(图⽚来⾃UIUC 计算机视觉课件)。
是⼀个⼩孔成像的模型,当中:点表⽰camera centre ,即相机的中⼼点,也是相机坐标系的中⼼点; 轴表⽰principal axis ,即相机的主轴;点所在的平⾯表⽰image plane ,即相机的像平⾯。
也就是图⽚坐标系所在的⼆维平⾯。
点表⽰principal point 。
即主点。
主轴与像平⾯相交的点;点到 点的距离。
也就是右边图中的 表⽰focal length ,即相机的焦距;像平⾯上的 和 坐标轴是与相机坐标系上的 和 坐标轴互相平⾏的。
相机坐标系是以 。
。
(⼤写)三个轴组成的且原点在 点。
度量值为⽶(m );像平⾯坐标系是以 ,(⼩写)两个轴组成的且原点在 点,度量值为⽶(m );图像坐标系⼀般指图⽚相对坐标系,在这⾥能够觉得和像平⾯坐标系在⼀个平⾯上,只是原点是在图⽚的⾓上,并且度量值为像素的个数(pixel )。
相机 转换到 像平⾯知道上⾯的简单知识后,假设知道相机坐标系中的⼀个点 (现实三维世界中的点)。
在像平⾯坐标系相应的点是 ,要求求从相机坐标系转为像平⾯坐标系的转换,也就是从 点的通过⼀定的转换变为 点的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摄像机标定原理
1、像素坐标系UOV
以像素为单位,原点在图像左上角,向左为u+,向下为v-。
2、成像平面坐标系X I O I Y I
成像平面坐标系建立在成像平面上,对于数字摄像机来说,成像平面即为相机CCD(或CMOS)感应元件平面,成像平面与光轴的交点即为原点,单位为mm。
假设成像平面坐标系原点O I在像素坐标系UOV中的坐标为(u0,v0),对于图像平面坐标系中的点(u,v),成像平面坐标系中的点(x1 ,y1),它们之间的关系如下:
u=x1
dx
+u0
v=y1
dy
+v0
其中, dx和dy表示图像中每一个像素在成像平面上对应的物理尺寸,通俗地讲,面积为dx∗dy(单位为mm2)的小单元在图像中表现为一个像素。
我们将上面两个等式改写为矩阵形式为:
[u
v 1]=[
1dx 0u 001dy v 00
1]
[x 1y 11] 3、相机坐标系O c −X c Y c Z c
相机坐标系O C 建立在摄像机上,坐标原点与投影中心(光心)重合,Z C 轴与成像透镜光轴重合,X C 和 Y C 分别与成像平面坐标系的X I 和 Y I 平行,图中O C O I 的距离即为相机焦距f 。
由透视投影模型可得,摄像机坐标系下的物点P(x c ,y c ,z c )与成像平面坐标系中的点(x 1,y 1)之间的变换关系为:
x 1=f x c
z c
y 1=f y c
z c
写成矩阵形式为:
z c [x 1y 11]=[f 00 0f 0 001 000][x c
y
c z c
1
]
内部参数矩阵
[u
v 1]=[
1
dx 0u 001dy v 00
01]
[x 1y 11]
两边同时乘以z c 得 z c [u v 1
]=[1
dx 0
u 0
01dy
v 00
1]z c [x 1y 11
]=[1
dx
u 0
1dy
v 000
1
][f 00 0f 0 001 000][x c
y c z c 1]=M 1[x c
y c
z c 1] 其中 M 1=[1dx
u 0
1dy
v 00
1][f 00 0f 0 001 000]=[f
dx
u 00
f dy
v 000
1
],M 1只与相机的内部参数结构有关,称为相机的内部参数矩阵。
4、世界坐标系O w −X w Y w Z w
外部参数矩阵
世界坐标系用来描述环境中任何物体的位置,它的设置与具体应用场合有关。
摄像机坐标系与世界坐标系的关系可以用旋转矩阵R 和平移向量T 来描述。
空间中某一点(x w ,y w ,z w )与摄像机坐标系中(x c ,y c ,z c )之间的关系如下:
[x c y c z c 1]=M 2[x w
y w z w 1
] 其中,M 2=[
R
T
1
],M 2只与相机与世界坐标系的相对位置有关,称为相机的外部参数矩阵,R 为3×3正交单位矩阵,T 为三维平移向量。
相机投影矩阵
z c [u
v 1
]=M 1[x c
y
c z c
1]=M 1M 2[x w y w z w 1
]
令M =M 1M 2,M 为3x4矩阵,表示了图像坐标系中的点与世界坐标系的点之间的关系,称为投影矩阵。