标准伺服电缸的结构介绍
伺服电动缸 - 行星滚柱丝杠,扬州众孚传动科技有限公司

120 200 400 800
150 250 500 1000
2500
1:1 / 2:1
有/无
前法兰
后法兰
耳轴
侧面安装
尾铰
外螺纹
内螺纹
杆端球铰
U型铰接
44.0 150 460 460
300mm 导程累积误差(mm)
0.018
重复定位精度(mm)
0.01
轴向间隙(mm)
0.01
最大加速度(m/s2) 5
所有型号的I系列电动缸都采用了这种滚柱丝杠技术(Roller Screw Technology)并可由多种外配的低 成本电机驱动,是一种性价比极高的电动缸产品。
两个不同性能产品系列:IX和IM
I系列电动缸提供两种不同机械性能等级的产品:IX系列和IM系列。您可以根据实际应用需求和费用预 算选择合适的产品。
1500
1800
1:1/2:1
有/无
前法兰
后法兰
耳轴
侧面安装
尾铰
外螺纹
内螺纹
杆端球铰
U型铰接
5.0 10.0 10.0 7.0 15 25 11 28 20 57 45 42
300mm 导程累积误差(mm)
0.018
重复定位精度(mm)
0.01
轴向间隙(mm)
0.01
最大加速度(m/s2)
4 4 6 6 4 8 6 84 8
FF = 安装方式 FF = 前法兰 RF = 后法兰 S1 = 单侧法兰
05 = 5mm
S2 = 两侧法兰
10 = 10mm
T = 耳轴
16 = 16mm
C1 = 单片尾铰
20 = 20mm
标准伺服电缸的结构介绍

4、轴承装置 由于电缸主要承受轴向力,轴承理想的选择是平面轴承+深沟球轴承,其次是角接触球轴承
二、电缸主要部件的讲解
5、导向装置 主要是出力轴运动时的导向,以及防止旋转的导向。
防止旋 转导向
主轴导 向
6、称重传感器 依据要求的压装力选择,0.5T、1T、2T、3T、5T、8T、10T
7、极限位置感应装置 通常选择接近开关(欧姆龙)或者磁感应开关
三、电缸出力的计算及相关配件的选择
从以下公式:出力大小=额定转矩*减速比*传动效率*2/导程 可以看出,我们选择合适的电机、减速比、导程大小,最终可以达到理论出力 同时设备的速度参数也能得到保证。 确定电缸速度的因素: 由于伺服电机的选择需要考量其额定转矩、最大速度、转子转动惯量等参数。 公司在应用到伺服电缸上的电机通常选择中惯量、中容量的SGMGV系列,其最大 速度为3000rpm,所以我们在限定电缸的参数时一般按一下规律: 1、1T、2T电缸的最大行走速度为160mm/s 2、3T、5T电缸的最大行走速度为120mm/s 确定电缸重复定位精度的因素: 电缸的驱动主体是滚珠丝杆,重复定位精度取决于丝杆本身的误差。 我们在选择丝杆时一般考虑的是C3、C4、C5、C7,对应的行程误差是300mm内 误差0.008mm、0.012mm、0.018mm、0.05mm。
选择丝杆举例:当重复定位精度要求+/-0.01mm时,行程300mm,需要选择的丝 杆精度是C3级;行程150mm,可以选择的丝杆精度是C4和C5级
四 电缸常见问题分析及解决
1、出力轴与导向铜套之间磨损 现象:a 出力轴上出现摩擦刮痕 b 出力轴下端掉落铜屑 c 出力轴与导向铜套之间出现刺耳的异响 原因:a 出力轴的圆度或者同轴度误差大,导致出现磨损 b 缸筒内部掉进金属碎屑 解决办法:更换磨损的出力轴和导向铜套,保证缸筒内干净。
电缸常用连接结构

电缸常用连接结构
电缸是一种常用的电动执行机构,广泛应用于各种自动化设备和工业生产线上。
电缸的连接结构是其重要组成部分,常用的连接结构包括以下几种:
直角连接件:直角连接件主要用于将电缸的输出轴与工作机构连接起来,具有结构简单、安装方便、精度高等特点。
根据不同的工作需求,直角连接件可以采用不同的材质和结构形式,如金属直角连接件、塑料直角连接件等。
伸缩杆:伸缩杆主要用于调整电缸的行程和位置,具有结构紧凑、调节方便、可靠性高等特点。
伸缩杆一般采用高精度钢材制造,可承受较大的负载和压力,同时具有良好的抗弯曲和抗扭性能。
链条传动装置:链条传动装置主要用于长距离和重负载的传动场合,具有传输平稳、结构紧凑、维护简便等特点。
链条传动装置一般由链条和链轮组成,根据不同的工作需求,可以选择不同的链条类型和链轮结构。
同步带传动装置:同步带传动装置主要用于需要高精度定位和传动的场合,具有传输平稳、传动效率高、抗干扰能力强等特点。
同步带传动装置一般由同步带和带轮组成,根据不同的工作需求,可以选择不同的同步带类型和带轮结构。
除了以上几种常用的连接结构外,还有一些其他的连接结构,如球头连接件、花键连接件等。
选择合适的连接结构需要根据具体的工作需求和设备参数来决定,以确保电缸在工作过程中具有良好的稳定性和可靠性。
标准伺服电缸的结构介绍

误差0.008mm、0.012mm、0.018mm、0.05mm。
选择丝杆举例:当重复定位精度要求+/-0.01mm时,行程300mm,需要选择的丝 杆精度是C3级;行程150mm,可以选择的丝杆精度是C4和C5级
三、电缸出力的计算及相关配件的选择
出力大小计算公式如下: 出力大小=额定转矩*减速比*传动效率*2/导程
1、出力大小是理论需要的最大出力(1T、2T、3T等等) 2、减速比是传动机构的速度比,有可能还要附加减速机 3、传动效率是指整体传动的效率,一般丝杆传动的效率是90% 4、导程指的是滚珠丝杆的导程
第一种选择方案的最大运行速度为:3000*10/60*2=250mm 第二种选择方案的最大运行速度为:3000*5/60*2=125mm 所以,如果在讨论参数时牺牲最大速度,可以降低电机的功率。同时需要注意客户的 产品是否需要保压。(需要保压时电机不能超负载)
三、电缸出力的计算及相关配件的选择
从以下公式:出力大小=额定转矩*减速比*传动效率*2/导程 可以看出,我们选择合适的电机、减速比、导程大小,最终可以达到理论出力 同时设备的速度参数也能得到保证。
举例:需要一支1T出力的电缸,选择合适的电机功率? 选择一:1.3KW电机,额定转矩8.34N.m,减速比2,导程10mm
理论出力=8.34*2*2*3.14*0.9*100/10=943Kg(小于1T,怎么办?) 解决办法:a 增加减速比为2.4,理论出力=1132Kg
b 减少导程为5,理论出力=1886Kg c 电机超额定负载,小于最大负载23.3N.m 选择二:0.85KW电机,额定转矩5.39N.m,减速比2,导程5mm 理论出力=5.39*2*2*3.14*0.9*100/5=1219Kg 此时,请注意其它重要参数:最大运行速度
Ortlieb SERAC KH伺服电动缸

的直接位置测量 7 紧凑结构的电机绕组 8 稳定的导轨结构
滚珠导套承受径向力 9 旋转编码器 (Resolver 或者 Hiperface) 10 电气接口(电源接口和编码器接口)
订货号
D D E E E E H H
型号/尺寸
KH5
KH12
KH30
45
65
90
1
1
1
2
2
2
3
3
4
4
5
1
1
1
2
2
0
0
0
1
1
1
2
2
2
3
3
1
1
1
2
2
2
选型样例 SERAC KH12 - 65 - 3 - D1 - E1 - H1 SERAC® KH5
125
H
L
55
50
SERAC® KH12
型号/尺寸 行程 丝杠导程 旋转编码器 直线编码器 固定方式
产品技术参数, 尺寸和行程
SERAC ® KH 产品技术参数 / 订购说明
配件参数
产品描述
行程 丝杠导程 旋转编码器 直线编码器 固定方式
45 mm 65 mm 90 mm 1 mm 2 mm 3 mm 4 mm 5 mm 1 = Resolver, 2-polig 2 = Hiperface 0 = 不含直线编码器 1 = 直接位置测量,增量编码器,正余旋编码器 2 = 直接位置测量,增量编码器 RS422 3 = 直接位置测量,SSI 绝对值编码器 1 = 前端法兰固定 2 = 侧面安装固定
电液伺服缸导向套静压支承结构特性分析
电液伺服缸导向套静压支承结构特性分析电液伺服缸是一种将电动机与液压缸相结合的设备,用于完成线性工作任务。
导向套静压支承是电液伺服缸中的一个重要组成部分,其结构特性对电液伺服缸的性能和使用寿命具有重要影响。
导向套静压支承结构一般包括静压导向套、活塞杆和活塞,其中静压导向套是关键部件。
静压导向套与滑动副的设计原则是使其能够承受载荷并具有良好的导向性能,在保证工作稳定性的同时减小摩擦和磨损。
静压导向套通常采用圆柱形或锥形设计,内壁涂覆有特殊材料,如液压油脂或涂层材料,以减小摩擦系数。
静压导向套的表面还要具有一定的光滑度,以减小液体通过导向套时的流阻。
静压导向套的内径设计与活塞杆的外径之间的间隙是影响导向套支承性能的重要因素。
间隙过大会导致导向不稳定,间隙过小则会导致润滑不良,增大摩擦力和磨损。
在设计中需要综合考虑材料的热膨胀系数和摩擦力矩等因素,确定合理的间隙值。
导向套静压支承结构的优点是具有很高的容错能力和抗冲击能力。
静压支承在载荷超过额定范围时不会发生回转或失效,能够提供良好的导向性能。
静压支承还具有较长的使用寿命和较低的维护成本,减少了故障和停机时间。
导向套静压支承结构也存在一些问题。
由于导向套内部需要润滑油脂的介入,因此存在润滑油脂泄漏的风险,需要定期检查和维护。
由于静压支承加工和安装要求较高,需要保证导向套与活塞杆之间的间隙均匀和恒定,否则会影响导向套的支承性能。
导向套静压支承结构是电液伺服缸中的重要组成部分,其结构特性对电液伺服缸的性能和使用寿命具有重要影响。
合理设计导向套的内径间隙,并定期检查和维护润滑油脂,可以提高电液伺服缸的工作稳定性和寿命。
加强加工和安装工艺控制,确保导向套的质量和间隙的均匀性,也是提高电液伺服缸性能的重要保证。
行星滚柱丝杠及伺服电动缸简介
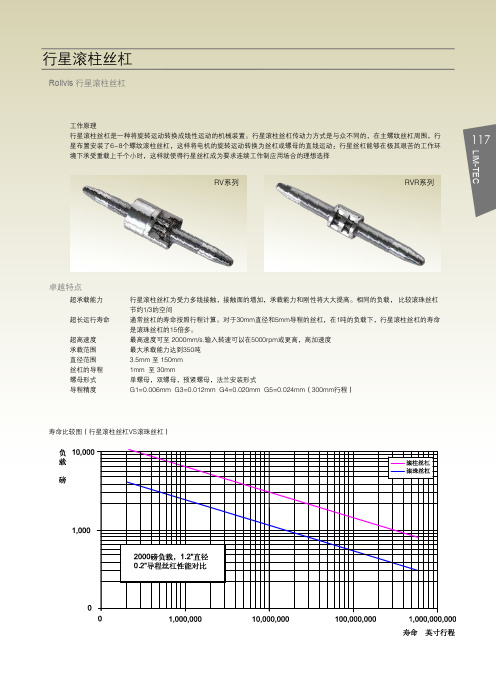
RV系列RVR系列
GSX系列 内含伺服电机,与各式伺服控制器匹配
超长寿命,最紧凑伺服电动缸
GSX系列集成了EXLAR行星滚柱丝杠技术和T-LAM定子分段迭片技术,创立直线运动的革命。
EXLAR独特设计将行星滚柱丝杠与电机转子有机结合,将行星滚柱均布安装在主丝杠周围,并精确机装入空心转子中,保证与转子绝对同步
Exlar 伺服电动缸 GSX 系列
◆每定子分段都包含独立相线圈,独立分段定子的外部线圈间的狭槽可以有效提高电机性能。
◆T-L A M技术电机按照U L标准,电机系统达到H级绝缘等级◆
T-LAM技术通过UL认证CE认证
特殊产品
不锈钢FT系列伺服电动缸,食品安全级伺服电动缸
高兼容性
Exlar产品减轻了最终用户的负担,将FT系列伺服电动缸设计成能与能与任意标准伺服电机相互组合。
安照客户的需求,配置
电机安装方式,推杆安装方式,齿轮减速比等。
FT系列伺服行星滚柱丝杠电动缸。
伺服电机组成及结构(3篇)

第1篇一、伺服电机的组成1. 定子定子是伺服电机的核心部件,其主要功能是产生磁场。
定子通常由硅钢片叠压而成,形成一定厚度的铁芯。
在铁芯上,绕制线圈,形成线圈组。
线圈组通常采用三相交流绕组,也有两相或单相绕组。
定子通过接入电源,产生旋转磁场,从而驱动转子旋转。
2. 转子转子是伺服电机的另一个核心部件,其主要功能是产生转矩。
转子通常由永久磁铁或电磁铁组成。
永久磁铁转子具有结构简单、性能稳定、响应速度快等优点,但体积较大。
电磁铁转子通过在转子铁芯上绕制线圈,实现转矩的产生。
电磁铁转子具有体积小、重量轻、响应速度快等优点,但需要外部电源供电。
3. 控制器控制器是伺服电机的控制中心,其主要功能是接收控制信号,对伺服电机进行控制。
控制器通常由微处理器、模拟电路和数字电路组成。
微处理器负责处理控制算法,模拟电路负责放大和转换信号,数字电路负责处理数字信号。
4. 传感器传感器是伺服电机的反馈元件,其主要功能是检测伺服电机的运动状态。
传感器通常有编码器、速度传感器和力传感器等。
编码器用于检测转子位置和转速,速度传感器用于检测转子转速,力传感器用于检测伺服电机输出的力。
5. 传动机构传动机构是伺服电机与执行机构之间的连接部分,其主要功能是将伺服电机的旋转运动转换为执行机构的直线运动或旋转运动。
传动机构通常有齿轮、皮带、丝杠等。
二、伺服电机的结构1. 定子结构定子结构通常分为两种:槽式定子和绕线式定子。
(1)槽式定子:槽式定子由硅钢片叠压而成,形成一定厚度的铁芯。
在铁芯上,开有槽,槽内绕制线圈组。
槽式定子具有结构简单、成本低、性能稳定等优点。
(2)绕线式定子:绕线式定子与槽式定子类似,但绕线方式不同。
绕线式定子采用绕线式绕组,线圈直接绕在铁芯上。
绕线式定子具有结构紧凑、散热性好等优点。
2. 转子结构转子结构通常分为两种:永久磁铁转子和电磁铁转子。
(1)永久磁铁转子:永久磁铁转子由永磁材料制成,具有结构简单、性能稳定、响应速度快等优点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、电缸出力的计算及相关配件的选择
从以下公式:出力大小=额定转矩*减速比*传动效率*2/导程 可以看出,我们选择合适的电机、减速比、导程大小,最终可以达到理论出力 同时设备的速度参数也能得到保证。 确定电缸速度的因素: 由于伺服电机的选择需要考量其额定转矩、最大速度、转子转动惯量等参数。 公司在应用到伺服电缸上的电机通常选择中惯量、中容量的SGMGV系列,其最大 速度为3000rpm,所以我们在限定电缸的参数时一般按一下规律: 1、1T、2T电缸的最大行走速度为160mm/s 2、3T、5T电缸的最大行走速度为120mm/s 确定电缸重复定位精度的因素: 电缸的驱动主体是滚珠丝杆,重复定位精度取决于丝杆本身的误差。 我们在选择丝杆时一般考虑的是C3、C4、C5、C7,对应的行程误差是300mm内 误差0.008mm、0.012mm、0.018mm、0.05mm。
三、电缸出力的计算及相关配件的选择
出力大小计算公式如下: 出力大小=额定转矩*减速比*传动效率*2/导程 1、出力大小是理论需要的最大出力(1T、2T、3T等等) 2、减速比是传动机构的速度比,有可能还要附加减速机 3、传动效率是指整体传动的效率,一般丝杆传动的效率是90% 4、导程指的是滚珠丝杆的导程 举例:需要一支1T出力的电缸,选择合适的电机功率? 选择一:1.3KW电机,额定转矩8.34N.m,减速比2,导程10mm 理论出力=8.34*2*2*3.14*0.9*100/10=943Kg(小于1T,怎么办?) 解决办法:a 增加减速比为2.4,理论出力=1132Kg b 减少导程为5,理论出力=1886Kg c 电机超额定负载,小于最大负载23.3N.m 选择二:0.85KW电机,额定转矩5.39N.m,减速比2,导程5mm 理论出力=5.39*2*2*3.14*0.9*100/5=1219Kg 此时,请注意其它重要参数:最大运行速度 第一种选择方案的最大运行速度为:3000*10/60*2=250mm 第二种选择方案的最大运行速度为:3000*5/60*2=125mm 所以,如果在讨论参数时牺牲最大速度,可以降低电机的功率。同时需要注意客户的产品 是否需要保压。(需要保压时电机不能超负载)
四 电缸常见问题分析及解决
4、同步带磨损 现象:a 皮带部有异响 b 上面有很多黑色皮带粉末 原因:a 安装同步带两端不同心 b 同步带和同步轮配套有问题 解决办法:间磨 损
四 电缸常见问题分析及解决
2、滚珠丝杆损坏 现象:a 出力不稳定,位移偏差比较大 b 滚珠丝杆部位出现异响 原因:a 加工件加工不同心造成 b 有铁屑掉入丝杆,导致丝杆螺母损坏 解决办法:更换丝杆,加工件不同心的情况下更换加工件
四 电缸常见问题分析及解决
3、轴承损坏 现象:a 轴承部位有异响 b 出力不稳定,位移偏差比较大 原因:a 有铁屑掉入轴承内 b 加工件轴承位加工部同心 解决办法:更换轴承,加工件轴承位不 同心的情况下,更换加工件 轴承的损 坏
同步轮, 同步带
二、电缸主要部件的讲解
1、伺服电机 选型:一般选择安川品牌或者松下品牌。 现在通常选择SGMGV系列(中惯量)
2、传动机构 依据传动的方便性一般选择同步带传动,特殊要求选择齿轮传动。 注意:齿轮传动噪音大,加工精度高,可传递的扭矩大。
3、驱动方式 通常选择滚珠丝杆,品牌为台湾上银HIWIN或者银泰PMI 丝杆直径为¢20、¢25、¢ 32、¢40、¢ 50,导程为5mm、6mm、10mm、20mm
4、轴承装置 由于电缸主要承受轴向力,轴承理想的选择是平面轴承+深沟球轴承,其次是角接触球轴承
二、电缸主要部件的讲解
5、导向装置 主要是出力轴运动时的导向,以及防止旋转的导向。
防止旋 转导向
主轴导 向
6、称重传感器 依据要求的压装力选择,0.5T、1T、2T、3T、5T、8T、10T
7、极限位置感应装置 通常选择接近开关(欧姆龙)或者磁感应开关
选择丝杆举例:当重复定位精度要求+/-0.01mm时,行程300mm,需要选择的丝 杆精度是C3级;行程150mm,可以选择的丝杆精度是C4和C5级
四 电缸常见问题分析及解决
1、出力轴与导向铜套之间磨损 现象:a 出力轴上出现摩擦刮痕 b 出力轴下端掉落铜屑 c 出力轴与导向铜套之间出现刺耳的异响 原因:a 出力轴的圆度或者同轴度误差大,导致出现磨损 b 缸筒内部掉进金属碎屑 解决办法:更换磨损的出力轴和导向铜套,保证缸筒内干净。
标准伺服电缸的结构介绍 及问题点分析
鑫台铭制 2016年7月22日
一、鑫台铭电缸的主要部件
1、伺服电机及驱动器 2、传动机构(同步带或齿轮) 3、驱动机构(滚珠丝杆) 4、轴承装置 5、导向装置 6、称重传感器 7、极限位感应装置
称重传感 器
滚珠丝杆 导向杆
伺服电机 轴承 此处放一张电缸剖图,指示各部件