TinyOS任务调度机制与实时调度构件设计
嵌入式操作系统内核原理和开发(改进型优先级调度)
嵌入式操作系统内核原理和开发(改进型优先级调度)上面的一篇博客说到了优先级调度,但是那个优先级调度算法比较极端。
打个比方说,现在王先生有三个小孩,分别是老大、老二、老三。
假设现在到了饭点,王先生需要给三个小孩喂饭。
此时如果是时间片轮转的话,那么就是绝对公平,王先生每人一口不停地进行喂饭。
如果是优先级调度,那么王先生首先自己有一个优先级考量,比如说三个小孩按照年龄顺序优先级是逐渐提高的,毕竟小孩需要更多的照顾嘛。
这个时候如果需要进行喂饭的话,那么王先生需要首先伺候好最小的那个小孩老三,才会有时间照顾老二,至于老大什么时候才能得到照顾那就看造化了。
现在,我们打算重新换一种方法。
假设三个小孩的优先级分别是1、2、3,其中年龄越小优先级越高,3代表高优先级。
接着,我们按照优先级给三个小孩安排时间片,分别是1、2、3。
同时,这个时间片不光代表了当前可用的剩余时间,还代表了小孩此时的临时优先级。
(1)首先王先生给老三喂饭,时间片降低1,即临时优先级为2;(2)接着王先生判断当前优先级最高的仍为老三,毕竟老二的优先级也没有超过老三,所以老三的时间片降1,临时优先级为1;(3)王先生获知当前优先级最高的为老二,老二获得时间片;(4)此时王先生发现三个孩子的临时优先级都一样,那么就会按照固定优先级的大小依次对老三、老二、老大进行喂饭。
我们发现,这中间受益最大的就是老二。
当然,我们可以做进一步推论,如果老王的孩子越多,那么优先级处于中间的孩子在时间片的分配上将更加均匀,响应也会更加及时,交互性也会变得很好。
根据以上的想法,我们重新改写了优先级调度算法,修改为改进型优先级调度算法,1int find_next_thread()2{3int index;4int choice = THREAD_MAX_NUMBER -1;5int value = gAllTask[choice].time_slice;67for(index = choice -1; index >= 0; index --)8 {9if(value < gAllTask[index].time_slice)10 {11 choice = index;12 value = gAllTask[index].time_slice;13 }14 }1516if(0 == value)17 choice = -1;1819return choice;20}21#define TIME_ROUND_SCHEDULE 022#define HARD_PRIORITY_SCHEDULE 023#define SOFT_PRIORITY_SCHEDULE 1这些代码都是可以在系统中共存的。
TinyOS任务调度的研究与改进
TinyOS任务调度的研究与改进李明,丁恩杰中国矿业大学信电学院,江苏徐州(221008)E-mail:lmsiee@摘要:本文介绍了TinyOS任务调度机制,指出TinyOS调度策略的特点及不足。
采用一种改进式NPEDF算法对TinyOS的调度器进行实时性改造,并详细描述了具体改进方案。
实验测试的结果证明了这种改进策略的有效性。
关键词:TinyOS,任务调度,实时性,NPEDF中图分类号:TP316.891.引言传感器技术、嵌入式计算技术、微电子技术、无线通信技术以及半导体与微机电系统制造技术的飞速发展和相互融合使得具有感知、计算和通信能力的低功耗多功能无线传感器网络得以实现。
近年来,无线传感器网络(WSN-Wireless Sensor Networks)被广泛应用于国防军事、国家安全、环境科学、交通管理、医疗卫生、反恐、灾害监测等领域[1]。
无线传感器网络操作系统(WSNOS)是无线传感器网络的支撑技术之一。
它是WSN 应用程序的基本软件环境,核心是任务调度。
目前面向无线传感器网络的操作系统主要有TinyOS、MANTIS OS[2]、SOS、SenOS[3]、PEEROS[4]等,其中最为流行的是加州大学伯克利分校开发的TinyOS[5]。
它采用基于组件的架构方式,在传感器网络天生就严格限制内存的条件下,可以用最小代码快速来创新和实现各种应用。
目前,它已经被成功的应用到多种硬件平台上,具有很高的应用价值和研究意义。
本文主要研究了TinyOS现有的任务调度策略,在分析出应用TinyOS可能存在的问题的基础上,结合嵌入式实时操作系统的相关理论,提出了一种改进式NPEDF算法,并用这种算法对TinyOS调度器进行实时性改造。
最后,通过实验对改进前后的TinyOS进行测试,以此来验证本文采用的调度算法对无线传感器网络通信性能的影响。
2.TinyOS 2.0任务调度策略TinyOS 2.0采用任务和事件驱动相结合的两级并发模型,任务调度策略采用简单的先进先出(FIFO)算法。
TinyOS调度机制研究与改进
维普资讯
4 3 96
科
学
技
术
与
工
程
7卷
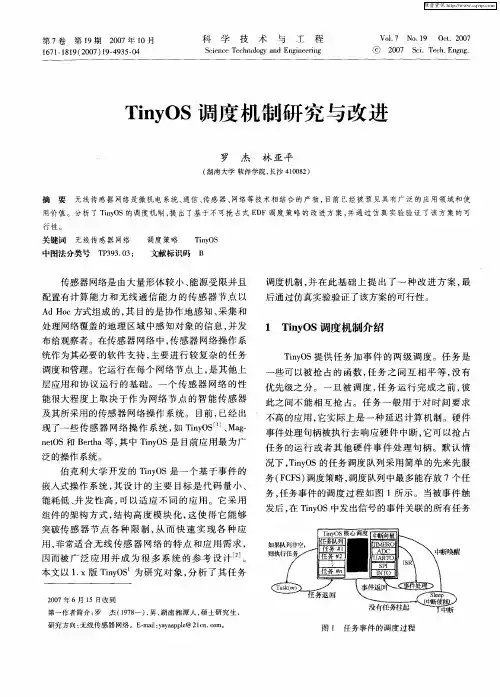
被迅 速处 理 。 当这 个 事 件 和 所 有 任 务 被 处 理 完 成
2 1 算 法可调 度性分 析 . 在时 间离 散 的 假设 前 提 以及 任 务 截 止 期 等 于
后 , 被 使 用 的 C U循 环 被 置 于 睡 眠状 态 , 未 P 而不 是 积极寻 找 下 一 个 活 跃 的 事 件 , 至其 它 事 件 将 它 直
20 0 7年返 回
事件返回、工 曼堡墼
第一作者简介 : 罗
杰 (9 8 ) 男 , 17 一 , 湖南湘潭人 , 硕士研究生
没有任务挂起
研究方向 : 无线传感器网络。Em i yyap @2 c .o — a : a l 1n cn。 la pe
图 1 任务事件 的调度 过程
维普资讯
第 7卷
第l 9期
20 0 7年 l 0月
科
学
技
术
与
工
程
Vo _ No 1 l7 .9
Oc.2 0 t 07
17 —8 9 20 ) 94 3 —4 6 1 11 ( 0 7 1 —95 0
S in e T c n lg n gn e i g ce c e h oo y a d En i e rn
唤醒 。
其 周 期 的情 况下 , 针对 周 期 性 实时 任务 ,ee 出 Jfy提
了不 可 抢 占 式 E F算 法 可 调 度 性 判 定 的 充 要 条 D
总 的来 说 , iy S的 调 度 机 制 具 有 如 下 几 个 Tn O
特点 :
调度
任务切换过程
处理器的SP=任 务块中保存的SP
恢复待运行任务 的运行环境 处理器的PC=任 务堆栈中的断点 地址
如何获得待运行 任务的任务控制 块?
获得待运行任务 的任务控制块
任务在没有被配备 任务控制块或被剥 夺了任务控制块时 的状态叫做任务的 睡眠状态
正在运行的任务,需要 等待一段时间或需要等 待一个事件发生再运行 时,该任务就会把CPU 的使用权让给别的任务 而使任务进入等待状态
OSRdyGrp | =OSMapTbl[prio>>3]; OSRdyGrp D7 D6 D5 D4 D3 D2
在程序中,可以用类似下面的代码把优先 1 1 级别为prio的任务置为就绪状态: 把prio为29的任务置为就绪状态
OSRdyGrp | =OSMapTbl[prio>>3]; OSRdyTbl[prio>>3] | = OSMapTbl[prio&0x07];
μC/OS-II实时操作系统
任务设计、调度及应用实例
主要内容
一. 基本概念 二.任务的要素 三. μC/OS-II的任务调度 四. 结合实例
uC/OS-II任务结构
从任务存储结构来看,由三部分构成:任务程序 代码、任务堆栈和任务控制块。任务控制块用来 保存任务属性,任务堆栈用来保存任务工作环境, 任务程序代码是任务的执行部分。
任务的优先权 及优先级别
在应用程序中定义任务堆栈的栈区非常简单, 即定义一个 OS_STK 类型的一个数组并在创建 保存CPU寄存器中的内容及存 一个任务时把这个数组的地址赋给该任务就 储任务私有数据的需要,每个 可以了。 任务都应该配有自己的堆栈, 例如:
任 务 堆 栈 任务堆栈是任务的重要的组成
Tinyos系统调度器与任务
Tinyos调度器和任务介绍1、介绍TinyOS有二个基本的计算抽象:异步事件和任务。
Tinyos早些版本提供单一的类型任务,没有参数且只能FIFO调度。
将任务调度表现成TINYOS组件更容易制定,将任务表现成TINYOS接口可扩展任务类型。
TINYOS2.0采用这二种方法,这份文本记录了其是如何以简单的机制来提高系统可靠性。
2、TinyOS1.x任务调度TinyOS中的任务是可延迟的调用过程DPC,可以使某程序延迟计算或操作。
TOS任务一次运行完毕,任务间不可抢占。
这二个约束条件意味着任务代码是同步的。
也就是说,任务是原子性的。
在tinyos1.x中,nesC语言通过二种机制支持任务,任务声明和任务发布表达post task void computeTask(){//Code here}result_t rval=post computeTask();TinyOS1.x提供单一的任务类型,无参数函数及单一FIFO的调度策略。
Post语句可返回FAIL,表明TinyOS发布任务失败。
可发布任务多次。
例如,如果某一任务连续发布了二次,第一次成功但第二次失败,此任务将会被运行一次。
因为这样,虽然一次发布失败,但任务仍可能运行。
Tinyos1.x调度器由sched.c文件中的C函数集实现的。
若要修改调度器则需替代或修改此文件。
另外,因为任务仅通过nesC中的task关键字声明和post关键字支持,假设是无参数函数,不能修改语句或任务功能。
Tinyos1.x的任务队列是由固定大小的函数指针类型的循环缓冲实现。
发布任务就是将此任务的函数指针放入下个空缓冲区中。
如果没有空的缓冲区,发布任务将返回失败。
这类模型有几个问题:1)某些组件针对发布任务失败没有合适的响应2)某给出的任务能发布多次,这将占用多个缓冲区3)所有组件的所有任务共享单一资源:某个有问题的组件可能导致其他组件发布任务失败。
从根本上来,为了使组件A在发布任务失败后重新发布任务,另外一个组件B必须调用A的函数(命令或事件)??。
无线传感器网络操作系统TinyOS综述
计算机与现代化2011年第2期JISUANJI YU XIANDAIHUA总第186期文章编号:1006-2475(2011)02-0103-03收稿日期:2010-10-19作者简介:吴小娜(1987-),女,江西崇仁人,东华大学计算机科学与技术学院硕士研究生,研究方向:无线传感器网络操作系统;王漫(1967-),男,上海市计算技术研究所高级工程师,研究方向:无线传感器网络,普适计算,协同计算。
无线传感器网络操作系统TinyOS 综述吴小娜1,王漫2(1.东华大学计算机科学与技术学院,上海200051;2.上海市计算技术研究所,上海200040)摘要:TinyOS 是无线传感器网络专用的操作系统。
本文首先分析TinyOS 操作系统的关键技术———组件化结构、调度机制、通讯模型及能量管理方式,然后将TinyOS 与另外两个操作系统μCOS-II 、μT-Kernel 在内核大小、时间可确定性、低功耗等方面进行简要对比,最后总结TinyOS 操作系统的缺点和存在的问题,为学习使用TinyOS 提供指导。
关键词:无线传感器网络;TinyOS ;综述中图分类号:TP316文献标识码:Adoi :10.3969/j.issn.1006-2475.2011.02.028Review of TinyOS for Wireless Sensor Networks Operating SystemWU Xiao-na 1,WANG Man 2(1.School of Computer Science and Technology ,Donghua University ,Shanghai 200051,China ;2.Shanghai Institute of Computing Technology ,Shanghai 200040,China )Abstract :TinyOS is the specific operating system for wireless sensor networks.First ,this paper introduces the key techniques of TinyOS ,such as component-based model ,scheduling mechanism ,communication model and energy management.Then it brieflycompares with the other two operating system μCOS-II ,μT-Kernel about RAM /ROM ,realtime performance ,low power etc.Fi-nally ,TinyOS shortcomings and exist problems are summarized.Key words :wireless sensor networks ;TinyOS ;review0引言无线传感器网络(WSN )[1-4]是多个具有感知、通信和计算能力的小型无线传感器网络节点自组织而成的新型网络,能够协作实时监测、感知和采集网络分布区域内的各种环境或监测对象信息,并对这些信息进行传输处理以获得所需信息。
任务调度机制
任务调度机制
任务调度机制是指一种自动化执行任务的方法,它可以将任务按照预定的时间或条件自动触发执行,从而提高工作效率和准确性。
任务调度机制通常包括以下几个方面:
1. 定时任务调度:根据设定的时间节点自动触发任务执行,例如每天凌晨执行数据备份任务。
2. 事件驱动任务调度:根据特定的事件触发任务执行,例如用户登录后触发欢迎消息发送任务。
3. 条件触发任务调度:根据特定的条件触发任务执行,例如当系统负载高于设定阈值时触发自动扩容任务。
任务调度机制可以应用于各种场景,例如数据处理、资源管理、自动化运维等。
通过合理的任务调度机制,可以实现系统自动化、高效化,从而提高企业的生产效率和竞争力。
- 1 -。
TinyOS操作系统开发技术及实践(西电版)第1章 TinyOS概述_OK
2021/6/30
10
10
第1章 TinyOS概述
版本 0.4.3 0.6.x 1.0 1.1.x
2.0 Beta
2.0.1 2.0.2 2.1.0 2.1.1 2.1.2 2021/6/30
时间 2000 年
2001 2002 年 9 月 2003 年 8 月
2006 年 2 月
2007 年 4 月 2007 年 7 月 2008 年 8 月 2010 年 4 月 2012 年 8 月
表 1-2 TinyOS 的版本变化
说明 通过 向公众开放 支持 mica 平台,期间 UBC 发布了支持 1000mica 平台的 TinyOS 项目, 2002 年 4 月 UCB 与 Intel 研究进行 nesC 语言开发合作 使用 nesC 语言重新编写并改进了 TinyOS nesC 增加部分新功能(如支持并发模型);TinyOS 增加新的 UART 通 信协议等 2.0 Beta1 发布,2.0 与 1.x 不再兼容,后者编写的代码将无法在 2.0 上编译通过;2.0 硬件抽象遵循 3 级结构;改进了任务调度策略;2.0 提 供了比 1.x 更丰富的定时器接口 增加 CC2420 低功耗协议栈;改进组件和接口的资源管理;增加 lib/printf 库;增加 lib/net/lqi 库;修复部分 BUG 重新实现了 CC2420 低功耗协议栈;修复部分 BUG 增加对 IRIS 和 shimmer 平台的支持;增加对 802.15.4 T-Frames 帧的 支持;增加低功耗应用开发指导 增加对 shimmer2、mulle、epic 平台的支持;增加 6LoWPAN/IP 协议 栈;改进 python SDK 增加 RPL 协议栈;增加对 ucmini、ATMega128RFA1、Zolertia Z1 平 台的支持;增加 CoAP 协议栈
liteos原理
liteos原理
LiteOS是一种轻量级的操作系统,主要用于物联网设备和嵌入式系统。
它的设计理念是高效、简洁和可裁剪,以满足物联网设备对资源有限的要求。
以下是LiteOS的一些原理:
1. 微内核架构:LiteOS采用了微内核设计,将操作系统内核拆分为多个独立的组件,每个组件负责一个特定的功能,通过消息传递进行通信。
这样可以提高系统的可靠性、可扩展性和可维护性。
2. 事件驱动机制:LiteOS使用事件驱动机制来处理任务和中断。
每个任务都是一个事件处理程序,通过等待和触发事件来执行相应的操作。
这种机制可以有效地利用系统资源,并提供响应快速的实时性能。
3. 轻量级调度器:LiteOS具有轻量级的任务调度器,可以根据任务的优先级和调度策略来分配CPU时间片。
它支持多任务并发执行,可以在不同的任务之间进行快速切换,从而实现任务的及时响应和高效运行。
4. 资源管理:LiteOS提供了简单而灵活的资源管理机制,包括内存管理、设备驱动和文件系统等。
它可以根据需求进行资源的动态分配和释放,以最大程度地减少内存占用和资源冲突。
5. 低功耗优化:LiteOS专注于物联网设备的低功耗需求。
它采用了一些省电策略,如睡眠模式、功率管理和时钟控制等,以降低能耗并延长设备的电池寿命。
总体来说,LiteOS通过精简设计和优化算法,使得其具有高效、可靠、可裁剪和低功耗的特性,非常适合于轻量级物联网设备和嵌入式系统的应用。
无线传感器网络节点操作系统TinyOS综述
无线传感器网络(Wireless Sensor Networks,WSN)是现代传感技术和无 线通信技术的结合体。在WSN中,大量的低功耗、低成本、紧凑型传感器节点以 自组织和多跳的方式进行通信,收集和处理环境信息,以实现各种应用,如环境 监测、军事侦察、智能家居等。为了有效管理和协调这些节点,需要一个相应的 操作系统。TinyOS就是一种专为WSN设计的开源、分布式、事件驱动的操作系统。
通信机方面,TinyOS支持多种无线通信协议,如ZigBee、IEEE 802.15.4 等。它采用了轻量级的通信协议栈,实现了高效、可靠的无线通信,并降低了功 耗。
TinyOS应用程序开发
使用TinyOS开发应用程序需要对TinyOS的编程模型有一定的了解。TinyOS 应用程序的基本结构包括硬件配置、任务定义、事件处理和通信协议等几个部分。
TinyOS内核分析
TinyOS的内核主要包括任务管理、内存分配和通信机制等几个部分。
任务管理方面,TinyOS采用了基于任务的调度模式,每个任务都有自己的优 先级和调度参数。系统根据任务的优先级和调度参数动态地调度任务执行,同时 通过任务间的同步和通信机制来实现协同工作。
内存分配方面,TinyOS采用了静态内存分配方式,每个任务都有自己的内存 空间,避免了对全局内存的竞争访问,提高了系统的效率和可靠性。
3、AI集成:人工智能技术在无线传感器网络中的应用前景广阔。未来 TinyOS可以集成AI算法和模型,实现对传感器数据的智能分析和处理,提高无线 传感器网络的智能化水平。
4、低功耗优化:低功耗一直是无线传感器网络追求的重要指标之一。未来 TinyOS可以通过进一步优化事件驱动机制、节能策略等方面来降低节点功耗,延 长网络寿命。
TinyOS操作系统的实现机制
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2007-05-09;修回日期:2007-07-18。
基金项目:国家863计划项目(2005AA1Z2120)。
作者简介:刘奎安(1982-),男,四川自贡人,硕士研究生,主要研究方向:无线传感器网络; 郭文生(1976-),男,辽宁铁岭人,讲师,博士研究生,主要研究方向:无线传感器网络、实时网络技术; 桑楠(1964-),男,四川营山人,教授,主要研究方向:嵌入式实时系统。
文章编号:1001-9081(2007)11-2740-03Tiny OS 任务调度机制与实时调度构件设计刘奎安,郭文生,桑 楠(电子科技大学计算机科学与工程学院,成都610054)(lka10271982@sina .com )摘 要:Tiny OS 是一个开源的构件化操作系统,它采用构件化描述语言nes C 进行开发,主要针对资源非常有限的无线传感器网络节点而设计。
分析了Tiny OS 22.x 的任务调度机制,针对其在实时应用领域的调度缺陷,设计并实现了一种软实时任务调度构件。
根据构件在T OSSI M 仿真器中的验证分析,能有效增强Tiny OS 的实时性能。
关键词:无线传感器;Tiny OS;实时;构件设计;T OSSI M 中图分类号:TP316;TP311 文献标识码:ASchedule m echan is m of T i n yO S and its rea l 2ti m e schedule co m ponen t desi gnL I U Kui 2an,G UO W en 2sheng,S ANG Nan(School of Co m puter Science and Engineering,U niversity of Electronic Science and Technology of China,Chengdu S ichuan 610054,China )Abstract:Tiny OS is an open 2s ource component operating syste m for sens or net w orks nodes that has very li m ited res ources .Tiny OS was i m p le mented in component 2devel op ing language nes C .Thr ough analyzing the schedule mechanis m of Tiny OS 22.x,a s oft real 2ti m e scheduler componentwas designed and i m p le mented for real 2ti m e app licati ons .Si m ulati on results in T OSSI M demonstrate that the s oft real 2ti m e component i m p r oves the real 2ti m e perfor mance of Tiny OS .Key words:wireless sens or net w orks;Tiny OS;real 2ti m e;component design;T OSSI M0 引言无线传感器网络(W ireless Sens or Net w orks,W S N )是由大量体积较小、能源受限,具有一定计算、存储和无线通信能力的传感器节点组成的无结构网络[1,2]。
它综合了传感器、嵌入式、无线网络、分布式信息处理等技术。
由于W S N 自身具备的特征,已广泛应用于国防军事、环境监测、交通管理、医疗卫生等领域。
无线传感器网络作为一个新兴的研究领域,其中存在大量挑战性的研究课题,节点上的操作系统(W irelessSens or Net w orks Operati on Syste m,W S NOS )设计与实现就是其中之一。
目前,国外许多大学、研究机构着手于W S NOS 的研究,开发出了Tiny OS [3]、Magnet 、MANTI S 、Sen OS 等具有典型特征的W S NOS 。
其中,由UC Berkeley 依靠S martdust (智能尘埃)项目开发出的Tiny OS 得到了广泛关注和应用。
Tiny OS 是全新面向W S N 的源码级构件化操作系统,由构件开发语言nes C [4]开发,其内核只需要400字节的内存空间即可运行起来,是一个轻量级操作系统。
但在实时应用中,Tiny OS 简单的F I F O 调度算法就显得不再适用,在任务数较多时重要任务的响应时间无法得到保证。
因此,针对实时应用的实时性需求,本文深入分析了Tiny OS 22.x 调度机制和调度相关的构件,提出了具有软实时性能的任务调度机制,开发了相应的系统调度构件,通过在T OSSI M [5]仿真器中进行仿真分析,此实时系统调度构件能提高Tiny OS 的实时性能。
1 Tiny OS 22.x 的调度机制1.1 Tiny OS 的任务事件驱动的并发模型Tiny OS 采用任务和事件驱动[6]相结合的两级并发模型(如图1)。
图1 Tiny OS 任务事件驱动并发模型示意图任务机制 任务由用户应用程序定义,可以由应用程序或事件处理程序创建。
任务由task 关键字定义,具体定义语法为:task void myTask (){…}。
任务由post 关键字创建,具体语法为:post myTask ()。
创建任务时,Tiny OS 的调度器将任务加入任务队列的队尾。
核心调度策略中的任务调度器把此任务加入任务队列后就立即返回,任务则延迟执行。
在等待执行的任务队列中,各个任务之间采用F I F O 原则进行调第27卷第11期2007年11月计算机应用Computer App licati onsVol .27No .11Nov .2007度,任务间不能相互抢占。
任务机制没有实时调度能力,适用于非抢占、时间要求不严格的应用。
事件驱动机制 事件直接或间接地由硬件中断产生,Tiny OS 接收到事件后,立即执行此事件对应的事件处理函数。
事件处理可以抢占当前运行的任务,应用于时间要求严格的应用中,但是产生事件的中断源极其有限,无法满足多任务的实时应用。
1.2 Tiny OS 22.x 任务调度实现的具体分析Tiny OS 22.x 源码中,任务调度器是由配置构件[7]TinyScheduler C 及其相关模块构件[7]构成。
配置构件TinyScheduler C 的作用是实例化调度器所用到的各个系统模块构件,并通过配线规范[6]将实例化的各个模块构件通过接口[6]组装起来,形成最终系统调度器。
图2 TinyScheduler C 构件模型TinyScheduler C 构件的实现体中与配线相关的语句有:Scheduler =Sched,说明TinyScheduler C 构件提供的Scheduler接口是由Sched 构件提供的;Task Basic =Sched,说明TinyScheduler C 构件提供的Task Basic 接口是由Sched 构件提供的;Sched .McuSleep ->Sleep,说明Sched 中使用到的McuSleep 接口是由Sleep 构件提供的。
在系统调度器中,负责调度功能的模块构件是Sched,该构件中包含了Tiny OS 的任务等待队列的数据结构和队列的操作函数。
描述任务等待队列的数据结构是在其实现体中声明的3个由volatile 修饰的uint8_t (8位无符号整型)的全局变量,分别是m _head 、m _tail 和m _next[NUM _T ASKS ]。
m _head 保存队首任务的任务号,用于调度器取队首任务执行;m _tail 保存队尾任务的任务号,用于调度器向任务队列中加入一个新任务;m_next[i ]数组(i 取值空间为0~NUM _T ASKS -1)用于保存任务i 的下一个任务的任务号。
其中8位无符号整型用于保存任务的任务号,说明Tiny OS 22.x 的系统中能够最大容纳任务数为255个(其中一个值为255作为空任务NO_T ASK 标识被占用),相比Tiny OS 21.x 的最大能容纳7个任务的循环队列得到了改进。
Tiny OS 在静态编译时计算出系统中定义的任务数NUM _T ASKS,并为每个任务分配各自的任务号(任务id,是个8位无符号整型),这样不仅能确定出m_next[NUM _T ASKS ]长度,节省了保存任务队列的内存空间,而且每个任务由系统统一分配不同确定的任务号id,方便了任务的管理。
1.3 Tiny OS 22.x 调度机制的特点从以上分析归纳出Tiny OS 的调度特点:1)任务之间不能相互抢占,所有任务共享一个执行空间,节约了系统运行时的内存开销;2)任务由系统中的一个单向任务队列进行管理,任务调度遵循F I F O 方式,避免了可抢占调度的复杂设计和死锁等问题;3)当任务队列为空且无事件产生时,处理器自动处于睡眠状态,并由随后硬件中断产生的事件唤醒,有利于系统节能;4)事件处理用来响应底层硬件的中断,如MCU 的外部中断、定时器中断等,其触发的事件处理抢占任务的执行,是一种异步、时间响应快的执行方式。
2 Tiny OS 22.x 的实时调度构件的设计与实现2.1 实时改造可行性Tiny OS 是基于构件的操作系统。
具体应用由不同的系统构件和用户应用构件通过接口组装而成。
所以,可以开发出实时调度的系统构件。
当应用需要实时调度时,采用实时调度构件替换Tiny OS 自带的队列调度构件来形成系统的任务调度器。
图3 Tiny OS 开发示意图存在着成熟而优秀的嵌入式实时操作系统提供实时调度算法和实时调度的实现可供改造时参考借鉴,如内核开源的μC /OS 。
无线传感器网络主要针对于具体的应用,在一定程度上简化了实时构件的设计,可以针对具体应用设计不同实时性能的系统构件。
2.2 实时调度构件具体设计与实现根据无线传感器网络的特性,确定实时性能改造原则:低开销原则 由于要考虑任务实时化的系统开销,一定要考虑节点的硬件情况。
兼容性原则 实时调度实现的调度器一定要满足构件化的nes C 编程规范,以便与系统组装构成应用系统。
可靠性原则 因为传感器网络节点上的MCU 多不提供地址保护。
应用在设计时一定要注意不能访问实时任务管理的地址空间,否则会造成系统崩溃。
实用性原则 实时构件设计不需要考虑得太复杂,可以针对具体的应用进行设计。