KRC4 PROFINET配置步骤
KRC4电动伺服焊钳配置与压力测试-d

导入机器人样本
导入设备说明书,例如:devicenet导入EKXXXX和EL6XXXX
注意:导入文件时,不 能有项目打开
EK1100 EL6752 EL6752-0010
组网
添加I/O模块
双击此处,出现右侧画面,在SLAVE SETTING界面设置 MAC ID地址
这个压力从小到大开始测试,对比压力表测 试结果。如果出入很大改动5P中的数据后再 次测试。
钳参数参考
4焊钳最大
2最大开口距 1减速比 3
伺服电机参数,参考。
选择5P,然后 测试输出压力 钳的最大压力 分填写。
填写焊钳的最大压力。附件4
把焊钳打开,选择这个程序 始运行,开始测压力,测试 然后记录下来,测试五次后 拿开,然后焊钳要回下零点
后退出
测试的五个数 输入。
然后点击计算
选择这个程序再次测试五 录下来。
后退出
测试的五个数 输入。
然后点击计算
选择这个程序进行测试,在开 对话框中选择压力
加载焊钳样本,选择伺服点焊 加载
机器人样本和焊钳的样本加载完成后点击close
右键点击项目,添加样本
选择合适的机器人样本,此处选中KR210 R2700, 添加
机器人已加载,接着添加焊钳
添加焊钳样本,此处选中KUKA的焊钳,然后点击
机器人和焊钳添加完成
然后把项目激活,此处点击右键,在菜单里 设为激活的控制器或者直接双击项目
值,来自焊钳的文档,参考最后
这两
依次选择菜单,点击 运行
选中此项
两种补偿方式,选择机器人补偿 然后点击保存,然后生成代码,下载到机器人里
继续KCP操作
KRC4配置Profibus

KRC4网络配置安装机器人自带的WORKVISUAL 软件,把电脑系统语言改成英语。
把电脑网络地址改成与机器人一致,打开软件,点击查找项目,更新网络,找到当前机器人正在运行的项目(前端带有绿色箭头),打开。
或将已备份的机器人程序打开,在C-KRC-USER-ProjectRoot 下有@BaseProject文件夹,里面存放初始项目文件,其他的文件夹存放备份的项目文件,打开。
激活Steuerung 1项目。
点出总线结构--KUKA Extension Bus—下,点击前面+号,显示灰色的模块是需要我们加载GSD文件的。
对应硬件配置,要找到对应的GSD文件。
文件--关闭,关闭当前项目,在文件—import/export—导入设备说明文件加载一个IM151模块GSD文件加载一个机器人里面的EK3100和EL6731模块对应的GSD文件加载SMC阀岛和CMT弧焊GSD文件添加完了之后在工具—DTM样本管理—查找安装的DTM,刷新数据,添加到—当前样本管理中去。
我们这个现场的机器人作PLC 从站的EL6731-0010 PROFIBUS Slave 和EL6731-0010 PROFIBUS DP Slave 是一样的功能,都是可以用的,注意在栏右键添加机器人,如不出现添加选项,可先在文件—目录文件,选择对应机器人类型。
在Profibus IO 处右键,添加对应的站模块,在Profibus settings 项 设置对应的站地址,(如要是有机器人需要组态两个用来切换的抓手,则把Always available 项对应的勾去掉,即不让机器人即时检测两个从站)。
双击对应模块 如ET 200S HighFeature ,添加对应从站下的插槽文件类型,注意与硬件匹配。
注意机器人中的关于输入输出顺序的设置要与PLC中对应给机器人设置相同,如下图是PLC中的网络组态。
接下来是配置每个模块在机器人中对应的I/O信号端口。
库卡KRC4系列机器人首次开机启动软硬件设置)

菜单顺序,点配置,用户组
用户组选择,safety,recovery,密码KUKA
按下主菜单按键,并选择菜单序列配置> 安全配置
在窗口故障排除助手中即显示可能的故障原因的概览。 在该列表中选中字段:机器人或 RDC 存储器首次投入运行 按下按键现在激活。窗口通用自动打开 窗口通用通过关闭图标 关闭。 显示以下信息:已成功保存改动。用按键 OK确认 硬件选项选择:
首次开机启动,电池的电源线是没有接的,需要插上,X305,
X305
接好的X305
电机电 缆及刹 车线X31
编码 器线
检查机器人本体接线,
机器控制柜下面接线检查
1 XS1 电源接口 2 X7.1 附加轴 (7)电机接口 (焊钳或者行走轴)
3 X20 驱动电机接口 (轴 1-6) 7 X11 接口 (安全回路,可短接或者投入运行手动机器人)
10 X19 smartPAD-接口(示教器接口) 11 X21 RDC- 接口
接线检查完毕,打开开关,顺时针方向,首次开机时间比较长,耐心等 待
主电源 开关
首次开机,KCP的急停是按下去的,顺时针方向,拔起
急停按钮
首次开机页面,显示以下查询:RDC 存储器和控制系统不一致 什么被 更换了,用按键 机器人确认, 显示以下信息:网络配置已还原. 用按键 OK确认。 用按键 全部 OK确认在信息窗口可以被确认的所有信息。
点硬件选 项出现下 个页面
安全配置选项
首次开机完成Байду номын сангаас
• Haiyanglove (海阳) • Email :haiyagnlove@
KRC 配置作为 rofiNet 从站
KRC4 配置作为 ProfiNet 从站KRC4 默认不支持 ProfiNET ,如果需要使用ProfiNET 则需要安装相应的软件包。
有两种软件包:∙KUKA.ProfiNet Controller / Device: Includes Profinet Controller, Profinet Device and Profisafe Device.∙KUKA.ProfiNet Device: Includes Profinet Device and Profisafe Device.如果要配置KRC4作为ProfiNET主站,就需要第一个软件包。
默认两种都支持KRC4作为DEVICE。
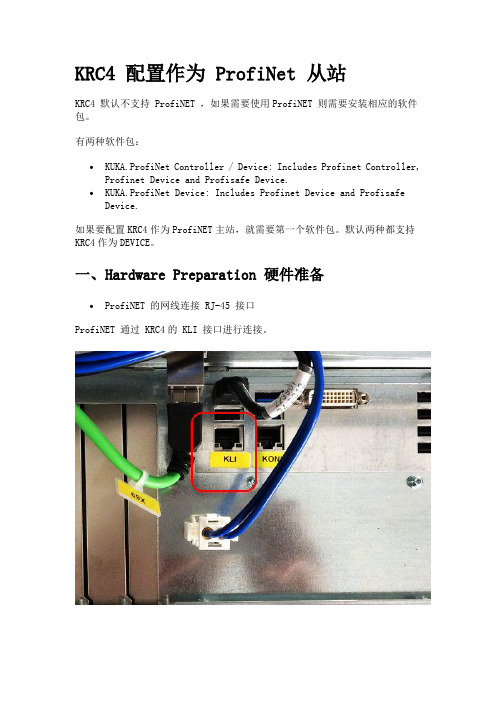
一、Hardware Preparation 硬件准备∙ProfiNET 的网线连接 RJ-45 接口ProfiNET 通过 KRC4的 KLI 接口进行连接。
二、Software Preparation 软件准备∙KRC4控制器安装 ProfiNET 软件包,如 PROFINET KRC-NEXXT V3.1。
∙PLC 端的组态。
其 GSDML 文件可以从 WorkVisual 安装程序包里获取,如 GSDML-V2.25-KUKARoboterGmbH-KUKARobotController-20130808.xml。
请参阅 KUKA ProfiNET 文档。
∙与 KSS 相对应的 WorkVisual 版本。
如 WorkVisual V3.X三、Hardware Connection 硬件连接∙通过网线将KRC4控制器与上级ProfiNET控制器连接。
四、Software Configuration 软件配置1. KRC4 KLI 接口 IP 地址设置在KLI接口设置 KRC4作为 ProfiNet 从站 Device 的 IP 地址。
注意不要使用系统保留的地址范围。
参考:PROFINET。
2. WorkVisual 中总线配置使用WoV连接 KRC4控制器,打开当前项目,上传至电脑,另存为相应的项目名字,保存。
关于KUKA C4机器人作从站时PROFINET网络如何设置的报告

关于KUKA C4机器人作从站时PROFINET网络如何设置的报告□通知■报告□通报编号发自发出时间2015/09/10 联系人电话现象说明:T15现场机器人作为从站时,与PLC之间的通信是通过PROFINET。
下面讲述一下用PROFINET时,机器人该如何配置:1、把电脑与机器人用网线连接好,把电脑的IP地址和机器人的IP地址网关改成一样。
完成后打开WORKVISOUL3.1软件,通过查找项目,找到此机器人。
选择到控制器,把控制器设为激活,然后打开项目后,选中profinet选项,右键选择设置。
出现如下图所示界面:2、第一步完成后,开始设置参数是机器人主机网卡型号;是安全信号分配的字节;是与PLC交互信号分配的字节;与PLC相同;此项是系统默认值,一般无须设置;这几项也是系统默认值,一般不需要设置3、上一步完成后,选择,右键选择连接。
完成后点击开始进行I/O地址映射。
输入输出映射方法相同,下面已输入为例,讲述如何进行IO映射。
映射时先点击下图右侧的现场总线然后选择输入,根据前面设定的进行选择输入信号的数量,如果前面选择的是128,那么这里也选择128.信号数量选好以后,开始对左侧进行选择。
先点击数字输入信号,然后分配数量,左右两侧信号数量可以保持一致,也可以左侧比右侧多,但一定不能比右侧少。
两边信号分配完以后,把两边分配的信号全部选中点击按钮,然后点击保存和按钮,上传到机器人即可。
总结:1、PROFINET设置时一定要选64,如果选择0,则无法运行外部自动功能,即使与PLC的通讯连接正常无出错。
2、点地址映射的时候点击PORFINET文件夹,不要点击文件夹里面的文件。
3、安全信号机器人这边不需要配置,PLC进行分配。
拟文部门领导分管领导管控/执行财务总监总经理部门主报:主发:。
S和KUK机器人PROFINET通讯组态编程

S和K U K机器人P R O F I N E T通讯组态编程集团标准化工作小组 [Q8QX9QT-X8QQB8Q8-NQ8QJ8-M8QMN]1.第一步:在博途新建项目,添加CPU1214C。
2. 2第二步:安装KUKA机器人GSD文件3. 3第三步:在硬件目录选中“”硬件组件。
4.4第四步:把选中的硬件组件拖放到网络视图编辑区。
5.5第五步:为CPU1214C添加PROFINET子网,并设置IP地址。
6.6第六步:将KUKA硬件组件分配到PROFINET子网,点击“未分配”。
7.7第七步:选中KUKA网络接口,点击鼠标左键,在以太网地址对话框设置IP地址为和PROFINET I/O设备名称为KRC4。
8.8第八步:进入KUKA设备视图删除64个I/O安全模块和256个I/O模块。
9.9第九步:重新添加I/O模块,将64个I/O模块添加到模块列表,之后编译下载硬件组态。
10.10第十步:双击“WORK VISUAL”图标,打开KUKA机器人设置软件。
11.11第十一步:在项目浏览器中选择“KRC4”项目模板12.12第十二步:在项目结构选中“控制器”点击鼠标右键,选择“设为激活控制器”13.13第十三步:选择对应的固件版本,点击“OK”按钮14.第十四步:在项目结构选中“总线结构”点击鼠标右击,添加PROFINET总线组件15.第十五步:在项目结构选中“PROFINET”点击鼠标右击,添加PROFINET I/O设备。
16.第十六步:双击“”设置KUKA总线IP地址为和设备名称为“KRC4”,确保与PLC组态的名称一致。
17.第十七步:将KUKA输入端口映射到PROFINET I/O地址18.第十八步:将KUKA输出端口映射到PROFINET I/O地址19.第十九步:下图是KUKA机器人输入和输出端口已映射完成的画面20.第二十步:点击“安装”按钮将配置下载到控制器。
21.第二十一步:点击“生成代码”按钮22.第二十二步:下图是机器人和S71200的输入和输出地址对应。
川崎机器人ProfiNet通讯步骤说明
10
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
双击川崎机器人模块并将信号数拖进设备概览一览中 图中所示为32位。
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
11
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
13
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
5
需要其他特殊设定的总线部分-ProfiNet从站设定
进入辅助=>6.输入/输出信号=>8.信号配置设定=>7.PROFInet Set菜单 在从口位置设定设备的名称,多台的情况下名称不可相同。 此项优先级高于IP
在下方菜单栏中往下设置机器人的IP地址和名称。 需要与示教器中设置的名称一样。
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
12
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
保存并下载到PLC中,当菜单栏川崎机器人配置没有显示红色图标时代表正 常连接。
7
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
将右侧新加载的xml文件拖到左侧组态框中
© 2015 Kawasaki Heavy Industries, Ltd. All Rights Reserved
8
总线PLC端设定参考-ProfiNet从站设定(西门子PLC)
工业机器人操作与应用【ch01】PROFINET工业网络通信 培训教学课件
KRC4系统PROFINET连接方式
在KRC4系统中,PROFINET模块可用于连接数字量和模拟量,在实际生产应 用中,比较常用的PROFINET模块目前由西门子、WAGO、Phoenix、P业 等制造厂商提供。 通常为了使现场总线连接渚晰,便于诊断通信模块的故障,KRC4系统还会 通过一个总线耦合器(Scalance交换机)与现场总线模块连接,总线耦合器中 设有可连接PROFINET模块的逻辑电路,现场总线可通过I/0接口与之连接。
KRC4系统PROFINET驱动程序
2 KRC4系统PROFINET驱动程序安装
驱动程序可以借助U盘KUKA.PROFINETOptionsCD(选项光盘)安装,也 可以通过网络安装。 PROFINET驱动程序的安装方式有两种,一种是通过示教器安装,另一种 是通过WorkVisual软件(KRC4系统专用软件)安装。
03
KRC4系统 PROFINET驱动程序
KRC4系统PROFINET驱动程序
1 KRC4系统PROFINET软件堆栈说明
KRC4系统通过库卡线路接口(KUKALineInte.tface,KLI)实现PROFINET通 信,PROFINET通信协议由安装的PROFINET软件堆栈提供,PROFINET软 件堆栈用于模拟传统PROFINET通信卡的功能。 PROFINET软件堆栈不仅简化了硬件配置,而且提高了系统的灵活性。
KRC4系统PROFINET连接方式
1 PROFINET概述
一类是实时通信(RT),这类通信没有时间同步要求,一般要求响应时间为 5~10ms,主要用于工厂自动化。实时通信时,应用程序通常并非同步运行, 应用程序、数据传输和现场设备具有不同的处理周期,周期时间和图像跳 动精度均很不精确。 另一类是等时实时同步通信(IRT),可实现节拍同步式的数据传输。 这种通信方式下,应用程序、数据传输和现场设备的处理周期保待同步, 周期时间小于lms,图像跳动精度小于O.O01ms,主要用于运动控制。
KR C4 控制柜标准输入输出模块配置说明
KR C4 控制柜标准输入输出模块配置说明KRC4 原生支持 Ethercat 协议,所以在 SYS-X44 接口上加入 EK1100 耦合器后,就可以增添离散IO模块。
下面以配置BECKHOFF的EL1809和EL2809输入输出模块为例:1硬件准备 / Hardware➤KUKA KR C4 控制器➤BECKHOFF 耦合模块 EK1100( EtherCAT )➤BECKHOFF 输入模块 EL1809(16 个点数字量 )➤BECKHOFF 输出模块 EL2809(16 个点数字量 )注:全文提到的 BECKHOFF 是 “倍福” 品牌。
2软件准备 / Software与控制器相对应的 WorkVisual 软件 (随机光盘)3硬件连接 / Connection在软件模块配置之前,下面我们首先为大家介绍一下如何安装接线:❶将 CCU 上的 X44 接入 EK1100 的 EtherCAT IN 口。
❷EK1100 的四个指示灯(图上绿色区域),上面的两个常亮,下面的 Link 灯高频闪烁,RUN 灯常亮。
❸电源端的接线用小螺丝刀(一字或十字)插入方孔中,斜向下拨压,将导线插入圆孔中,再将小螺丝刀释放取出,导线被压牢。
注意:EK1100 上方的 24V / 0V 是给 EK1100 自身供电的,而下方的 + / - 是给后续模块的输入/输出端子供电的,都需要接线。
❹输入回路需要与电源正极连接,故传感器或开关的一端接 EL1809 上的 16 个端子任意一个,另一端接EK1100 上的 + 。
❺输出回路需要与电源负极连接,故负载的一端接 EL2809 上的 16 个端子任意一个,另一端接EK1100 上的 - 。
4软件配置 / Configuration1. 导入模块设备说明文件(简称 ESI )文件❶从 BECKHOFF 官网下载相关模块设备说明文件( ESI )。
打开 WorkVisual 软件,菜单 File/ Import / Export / Import device description file。
KUKA KRC4控制柜通讯配置说明
KUKA KRC4控制柜通讯配置说明2012年10月V1.0版硬件准备:可安装或已经安装KUKA WorkVisual 软件的电脑方头USB线一根网线一根配置步骤:(此说明文档以KRC4控制柜与倍福EK1100和EL6752模块,欧姆龙PLC通讯为例)0.在用于调试的个人电脑上安装好KUKA WorkVisual 软件,已经安装则跳过此步*大图可查看压缩包内“0.WorkVisualSetup安装说明.JPG”1.在WorkVisual中导入待与KRC4控制柜通讯设备模块的说明文档,具体步骤参见压缩包内视频“1.导入设备配置文件.wmv”已经导入对应文档则跳过此步2.检测KRC4控制器与待连接通讯模块接线是否正确(KRC控制柜X65端口-----倍福DveviceNet模块X1IN端口),将个人电脑用网线连接至KRC控制柜X66端口,然后使用WorkVisual设置KRC4端配置。
具体步骤见压缩包内视频“2.WorkVisual端通讯配置.wmv”3.WorkVisual端配置完成后需保存项目并将Windows系统切换至英文(WorkVisual软件在安装项目至KRC4控制柜时只不支持中文系统),具体步骤见压缩包内视频“3.WorkVisual项目传送至KRC步骤1.wmv”如直接使用英文Windows进行配置则跳过系统语言切换4.切换至英文Windows系统后在WorkVisual里将配置好的项目安装至KRC4。
具体步骤见压缩包内视频“4.WorkVisual项目传送至KRC步骤2.wmv”5.完成上述步骤后将个人电脑用USB线连接至PLC,配置PLC端通讯并检测连接是否正确,具体步骤见压缩包内视频“5.PLC端配置与通讯连接检测.wmv”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KUKA KRC4机器人网络配置步骤配置SLAVE卡步骤如下:
打开WorkVisual (该软件须安装在英文XP系统下)
选择BROWSE选项,如果网络连接正确会自动扫描出KUKA的项目
点击后选择活动的project,
选择OPEN,然后双击steuerung,后uploadz机器人系统上来
右键点击PROFINFT选择settings
Network adapter 选择通讯的网络
Adtivate PROFINET device stack 选中激活
Number device I/O 配置通讯字节数,大众选中256(该项由PLC配置)
Device name (该项由PLC配置)
配置完成选择保存并且编译下载到机器人里面(该过程在后面)配置安全通讯码:机器人选择专家模式
选择Configuration/safety configuration/communication parameters/Safety ID
该Safety ID就是PLC要求配置的安全码(该安全码为PLC配置时候给的需要沟通核对)
配置Master卡步骤如下:以Festo阀岛为例1导入GSD文件,选择file/impor.Expot
选择impot device description file/next
选择你要导入的GSD文件
2分配IP地址右键点击PFOFENT/选择connect
扫描网络所挂的模块信息
填入你所要配置的信息包括NAME / IP addess 等相关信息,然后点击set device name
添加要配置的模块的,右键点击PROFINET IO/add,选择要添加的模块
选择到要配置的模块,如下配置相应的的IP地址和Device name
映射相应的IO,下图映射的是E800开始,然后选择编译
选择download,然后点击NEXT
选择Activate,在选择之前机器人必须处于专家模式
如下图所示,此时机器人KCP上会询问你是否激活新的项目,选择是
ROBOT上显示如下信息,选择YES。