CATIA常见运动仿真机构命令详解分析
CATIA__DMU机构运动分析
DMU 机构运动分析目录1产品介绍32图标功能介绍(基本概念、基本界面介绍)32.1DMU运动仿真(DMU Simulation)工具条32.2DMU运动副创建工具条(Kinematics Joints)32.3DMU Generic Animation42.4机构刷新(DMU Kinematics Update)42.5干涉检查模式工具条(Clash Mode)52.6DMU 空间分析(DMU Space Analysis)53功能详细介绍53.1DMU运动仿真(DMU Simulation)工具条53.1.1用命令驱动仿真(Simulating with Commands)53.1.2用规则驱动仿真(Simulating With Laws)73.1.3仿真感应器(Sensors)83.1.4机构修饰(Mechanism Dressup)93.1.5创建固定副(Fixed Part)103.1.6装配约束转换(Assembly Constraints Conver)113.1.7测量速度和加速度(Speeds and Accelerations)123.1.8机构分析(Mechanism Analysis)143.2DMU运动副创建工具条(Kinematics Joints)163.2.1创建转动副(Creating Revolute Joints)点击163.2.2创建滑动副(Creating Prismatic Joints)173.2.3同轴副(Creating Cylindrical Joints)183.2.4创建球铰连接(Creating Spherical Joints)183.2.5创建平动副(Creating Planar Joints)193.2.6创建刚性副(Rigid Joints)203.2.7点-线副(Point Curve Joints)203.2.8曲线滑动副(Slide Curve Joints)213.2.9点-面副(Point Surface Joints)223.2.10万向节(Universal Joints)223.2.11CV连接(CV Joints)233.2.12创建齿轮副(Gear Joints)243.2.13滑动-转动复合运动副(Rack Joints)263.2.14滑动-滑动复合运动副(Cable Joints)273.2.15用坐标系法建立运动副(Creating Joints Using Axis Systems)27 3.3DMU Generic Animation工具条293.3.1创建运动仿真记录(Simulation)293.3.2生成重放文件(Generate Replay)303.3.3重放(Replay)313.3.4仿真播放器(Simulation Player)313.3.5编辑序列(Edit Sequence)313.3.6包络体(Swept Volume)313.3.7生成轨迹线(Trace)313.4机构刷新(DMU Kinematics Update)323.4.1机构位置刷新(Update)323.4.2输入子机构(Import Sub-Mechanisms)323.4.3重设位置(Reset Positions)333.5干涉检查模式工具条(Clash Mode)343.5.1关闭干涉检查(Clash Detection(Off)343.5.2打开干涉检查(Clash Detection(On)343.5.3遇到干涉停止(Clash Detection(Stop)343.6DMU 空间分析(DMU Space Analysis)343.6.1干涉检查(Clash)343.6.2距离和距离带分析(Distance and band analysis)341产品介绍DMU机构运动分析(Kin)是专门做DMU装配运动仿真的模块。
CATIA V5 R20运动仿真

运动仿真学习情况1——旋转副;可以单独驱动,驱动的是旋转角度;只能实现绕自身的轴旋转;√2——棱形副;可以单独驱动,驱动是滑动长度;只能实现沿着公共线滑动;√3——圆柱副;可以单独驱动,可以同时驱动是滑动长度和旋转角度,这两个驱动添加后就可以运动了;只能实现绕轴旋转并沿轴线滑动;√4——螺钉副;可以单独驱动,实现实体每转动1圈,就前进多少mm。
不一定非要是螺杆和螺母,其他的旋转前进仿真也可以使用该命令。
6——平面副;不可以单独驱动,约束一公共平面,具有除沿平面法向移动及绕平面坐标轴转动外的3个运动自由度√7——点曲线副;不可以单独驱动,只能由其他运动副带动起来;点必须在曲线的上面,不在就是不行,实现点在曲线,也就是点在轨迹线上走动。
√8——滑动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√9——滚动曲线;不可以单独驱动,只能由其他运动副带动起来;约束两轨迹线相切,实现线在线上滑动;√10——点曲面;√不知道他与点曲线有何区别?11——U形结合;√3条轴线相交且位于同一平面内,且输入、输出端轴线与中间轴轴线夹角相同时,可以使用该命令13——齿轮接合;注意齿轮接合的对象不一定是齿轮,只要是一个旋转体带动另一个旋转体的话,就可以使用齿轮接合。
14——齿轮齿条:对旋转副和棱形副进行约束,有个比率15——电缆;√16——刚性结合;√17——使用命令进行模拟√18——使用法则曲线进行模拟√19——机械装置修饰20——装配约束转换√22——分析机械装置23——模拟24——编辑模拟25——重放26——模拟播放器27——编辑序列28——扫略包络体29——轨迹30——重置位置:√仿真的注意点如下:1——驱动对象的选择是有原则的;不可以随便选择,必须符合实际的运动情况;当定义驱动对象时,驱动对象也是有原则的,比如我们在定义旋转副的驱动对象时,如果要求我们的驱动对象进行360度全周旋转的话,那么的我们的对象在实际情况中必须能够或者说可以旋转360度,在整个运动机构当中并不是所有的旋转副都可以旋转360度,有的只能旋转几度,,因此一定要搞清楚哪个对象可以旋转360度,搞清楚这个事情后在去将他定义为驱动对象,如果对象本身不可能旋转360度,而你要把他定义为驱动,还要他旋转360度的话,这样的运动仿真是不成功的。
catia运动仿真案列讲析

产品研发一部底盘室:马学超题目:基于CATIA运动仿真案列解析DMUDMU—案例讲析•1、运动分析证明带夹角十字轴不等速性运动分析证明带夹角十字轴不等速性及、三轴平行的等速性;及一、三轴平行的等速性;2、绘制单前桥转向的实际转向特性曲线;单桥转向实转向特性曲线3、扫掠包络体和运动间隙、干涉校核;DMU—案例讲析DMU•案例一:运动分析证明带夹角十字轴不等速性及一、三轴平行的等速性DMU—案例讲析DMU本案例以通用结合为基础,先做运动仿真,模型如下;仿真步骤就不再赘述在蓝色零件和灰色零件之间的旋转结合设置驱动角度,其余两个设为从动件;由右下图的十字销轴线方向可以的“十字销轴线方向”可以看出通用结合是在两个旋转结合之间用默认的十字轴或是万向节接所以可以看成是传动轴间的动;连接,所以可以看成是传动轴之间的运动;DMUDMU—案例讲析设置完成之后,点击(使用命令进行模拟)按钮,弹出如下图1所示窗口,并点击“激活传感器”,弹出如下图2所示窗口,依次将窗口中的三个旋转结合的传感器打开,“观察到”下方的“否”图1全部变为了“是”;此时用鼠标在图1中拖动滚动条到个极限位置然后选中拖动滚动条到一个极限位置,然后选择“按需要”,并点击让其旋转两周;图2DMU—案例讲析DMU旋转过两周之后,点击“传感器”窗口中的“图形”按钮,系统便会自动弹出如下图1所示窗口,图中左边窗口表示三个旋转结合的运动曲线图,横坐标表示步骤数,纵坐标表示瞬时角度值;图1DMU—案例讲析DMU由右两图可以分析出,红色线和黄色线完全重合,色线和黄色线完全重合表示旋转结合1和旋转结合3的瞬时角度值始终是相等的;黄色线和绿色线并未重合,而是随着的步骤数或是时间的变化,存在着大、小、相等关系的波动;由上可得结论:夹角相等的传动轴的角速度是时刻相等的,夹角不同的传动轴的角速度是不相等的;DMU—案例讲析DMU•案例二:绘制单前桥转向的实际转向特性曲线首先对前桥产品中各个部件之间的结合关系进行分析(此处已将左轮毂与做轮胎合并为一个part,右轮毂与轮胎合并为一个part):左轮与工字梁之间是旋转结合,左轮与横拉杆之毂与轮胎合并为个t)左轮与工字梁之间是旋转结合左轮与横拉杆之间是球头结合,右轮与横拉杆之间是球头结合,右轮与工字梁之间是旋转结合;按照分析,依次将各结合实施好;DMUDMU—案例讲析按照分析将各个部位结类束好按照分析将各个部位的结合类型约束好,发现系统的自由度并不为0,不会提示“可以模拟机械装置”,那是因为横拉杆和左右车轮之间的两个球头结合并不能将横拉杆绕本身轴线转动的自由度约束住,所以不能模拟,此时我们可以将左端的球头约束处添加一个万向节,由球头约束转化成十字轴与万向节前后节叉之间的两个旋转结合,再将前节叉与左轮之间的两个旋转结合再将前节叉与左轮固连在一起,后节叉与横拉杆固连在一起,这样便能够约束住横拉杆的转动;十字轴的中点就是球头的中点;DMUDMU—案例讲析yzxo一根杆本身具有6个自由度,分别为沿x、y、z三个轴的轴向移动,和绕三个轴的转动,轴头处的两个球面结合能够将杆本身的沿三个轴的轴向移动约束住,的转动轴头处的两个球面结合能够将杆本身的沿三个轴的轴向移动约束住绕y轴和z轴的转动自由度能够约束住,但是绕x轴,也就是本身球头中心点连线的转动自由度没有约束住,所以自由度是没有约束完全的,所以要将其中的一处球面结合转化为其他形式的结合类型;DMU—案例讲析DMUyzxo对于具有折弯的杆系,对其一端处球面结合类型的转化或添加其他形式的结合类型非常关键,杆系绕球头中心点连线的轴线的转动角度如果失真的话,会导致杆型非常关键杆系绕球头中心点连线的轴线的转动角度如果失真的话会导致杆系折弯处与周边零部件之间的干涉、间隙校核出现严重错误,经过一定量的实验经验验证,将一端处的球面结合转化为一个万向节的方式较为合理,没有太大出入,并且理解、操作较为简单;入并且理解操作较为简单DMUDMU—案例讲析※将两个球头中一个球头结合转化成万向节连接是一个重点,也是难点,将两个球头中个球头结合转化成万向节连接是个重点也是难点万向节的初始位置对仿真模拟的运动真实性有很大影响,尤其是在有多个万向节并用的时候,这个要在反复的尝试和经验的指导中寻找到比较合适的位置与状态;DMU—案例讲析DMU将万向节的结合设置好之后,系统便会提示将万向节结设好后统便会提示“可以模拟机械装置”,此时产品中的树的状态如右图所示,双击“旋转1”,弹出右下图所示窗口,对其中的角度进行设置,左转为‐45deg,右转为36deg,设置完成点击确定;DMU—案例讲析DMU单击(使用命令进行模拟)按钮,弹出右上图所示窗口,点击“激活传感器”,弹出如右下图所示窗口,将其中“旋转1”、“旋转2”的传感器打开,其状态由“否”变为“是”;此时,点击上图窗口中的按钮,让滚动条此时点击上图窗中的按钮让滚动条滚动一圈,此时,点击下图窗口中的“图形”按钮,便会弹出下页中的曲线图;DMUDMU—案例讲析系统自动生成右图曲线图为旋转1和旋转5即左轮和右轮的不同步骤时或是不同时刻时的角度值同时刻时的角度值;DMU—案例讲析DMU点击右图中“文件”按钮,会弹出右下图所示窗口,此窗口为上页所示曲线图的各个步骤时的对应的角度值的excel表格导出命令,将此表格文档命名为“texingquxian”,并保存;DMU—案例讲析DMU双击,打开文档,文档中C列为左轮的瞬时文档中“”列为左轮的瞬时转角值,“D”列为右轮的瞬时转角值,其所处表格格式为文本格式,先将其转化为“文本”格式,先将其转化为“数字”格式;DMU—案例讲析DMU在excel中插入X Y(散点图),然后点击,弹出右下图,点击窗口中的“添加”按钮,弹出下页窗口DMU—案例讲析DMU右图中系列名称填写转向特性右图中“系列名称”填写“转向特性曲线”,“X轴系列值”选择“C”列数据,“Y轴系列值”选择“D”列数据点击确定时文档中图表据,点击确定,这时文档中图表变为下图所示曲线,此便为以数模为基础的“实际转向特性曲线”通过“实际转向特性曲线”与“理论转向特性曲线”的比较,可分析“吃胎”问题;“吃胎”问题DMUDMU—案例讲析案例中要点此案例中的要点:1、数模的准确性:数模中的主销倾角,横拉杆长度,梯形节臂,球头中心点位置的准确等;2、等效转换球头结合的万向节的节叉的初始位置的合适性;DMUDMU—案例讲析•案例三:扫掠包络体和运动间隙、干涉校核将4181车型数模按照如图所示进行装配,零件有:车架(包含固定在车架上的方向机及转向操作机构,前悬架总成,前轴挡泥板)转向垂臂,直拉杆,左转向轮,工字梁,横拉杆,右转向轮;DMU—案例讲析DMU具体结合类型:转向垂臂和方向机之间为旋转结合,垂臂和直拉杆之间为球头结合,直拉杆和左转向轮的转向节臂之间为球头结合,左转向轮为球头结合直拉杆和左转向轮的转向节臂之间为球头结合左转向轮和工字梁之间为旋转结合,左转向轮梯形臂和横拉杆之间为球头结合,横拉杆和右转向轮梯形臂之间为球头结合,右转向轮和工字梁之间为旋转结合,设置车架为固定件,工字梁和车架固连在一起,左转向轮和工转结合设置车架为固定件工字梁和车架固连在一起左转向轮和工字梁之间的旋转结合设置驱动角度;DMU—案例讲析DMU由案例2知:连续的两个球头结合中,要将其中的一个球头结合转化为一个万向节的连接,现在产品中导入万向节叉和十字轴,将转向垂臂和直拉杆之万向节的连接现在产品中导入万向节叉和十字轴将转向垂臂和直拉杆之间的球头结合用一组万向节代替,前后节叉分别与十字轴之间设置旋转结合,前节叉与转向垂固连在一起,后节叉与直拉杆固连在一起,将左转向轮梯形臂和横拉杆之间的球头结合用组万向节代替,前后节叉分别与十字轴之间臂和横拉杆之间的球头结合用一组万向节代替,前后节叉分别与十字轴之间设置旋转结合,前节叉与左转向轮梯形臂固连在一起,后节叉与横拉杆固连在一起,此时系统会提示“可以模拟机械装置”;DMU—案例讲析DMU各个部位的结合命令和刚性连接以及固定件都设置好之后,模型树如右图所示;将左轮和工字梁之间的旋转结合设置驱动角度,范围‐45deg到36deg;DMU DMU—案例讲析单击中的(模拟)按钮,弹出右边图1、图2两个窗口,将图1中滚动条拖动到一边极限位置,此时将图图1滚动条拖动到边极限位置,此时将图2窗口中“动画视点”和“自动插入”按钮激活,此时再用鼠标拖动图1中的滚动条来回滚动一遍,然后点击确定;图2DMUDMU—案例讲析此时在左边的树中会显示如右图所示,会生成一栏“模拟”DMU—案例讲析DMU接着点击中第二个(编译模拟)按钮,弹出下图所示窗口,直接点击确定系统会自动成放点击“确定”,系统会自动生成“重放”文件,在左边树中会增加如下图显示;DMU—案例讲析DMU点击中的(模拟播放器)按钮,弹出下图所示窗口,此时在左边树中点击,播放器被激活,此时单击播放器窗口中的各个按钮,仿真运动会自动播放;DMUDMU—案例讲析点击中的(扫掠包络体)按钮,弹出右图1所示窗口,点击“要扫掠的产品”后面的按钮,弹出如下图2窗口,会显产品”后面的按钮弹出如下图窗口会显示出所有要扫掠包络体的产品,这里只做左轮的包络体,单击确定;将图1中的“轮廓”项激活,过滤精度改为1mm;单击预览;激活“过滤精度”改为图1图2DMUDMU—案例讲析单击预览之后,系统会自动计算生成包络体,生成包络体过程比较慢;右下图所示便是左轮的扫掠包络体;DMU—案例讲析DMU此时点击“扫掠包络体”窗口中的“保存”按钮,系统自动弹出生成包络体的保存窗口,其命名可根据需要进行更改,其格式只有四种供选择;这里选择cgr格式进行保存;DMU—案例讲析DMU保存完之后,在“插入”中点击“现有部件”,找到刚才保存的左轮的包络体,插入到装配文件中,此时包络体被导入到装配文件中,如右图显示;件中如右图显示(保存的包络体文件)DMU—案例讲析DMU本案例要点:1、关于万向节的引用,各个位置点必须做到与实际一致,并且在进行结合设置之前,必须保证同轴和平面平行;在进行结合设置之前必须保证同轴和平面平行2、扫掠包络体必须先进行“模拟”‐‐“重放”;(这里只介绍这一种,扫掠包络体还可以识别“追踪”)。
CATIA运动分析方法
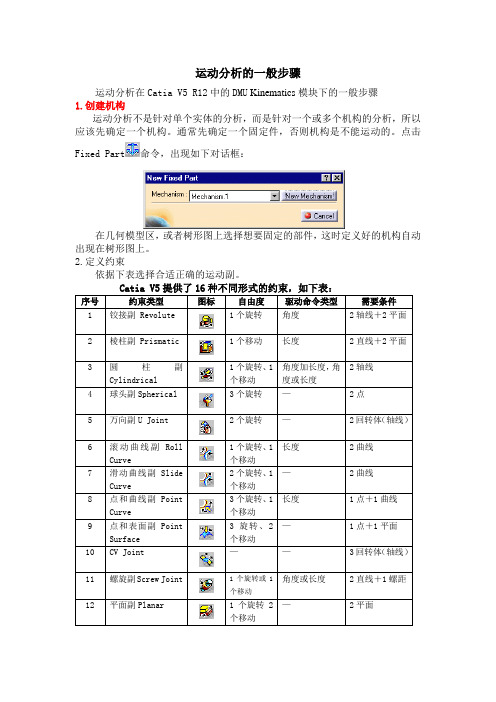
运动分析的一般步骤运动分析在Catia V5 R12中的DMU Kinematics模块下的一般步骤1.创建机构运动分析不是针对单个实体的分析,而是针对一个或多个机构的分析,所以应该先确定一个机构。
通常先确定一个固定件,否则机构是不能运动的。
点击Fixed Part命令,出现如下对话框:在几何模型区,或者树形图上选择想要固定的部件,这时定义好的机构自动出现在树形图上。
2.定义约束依据下表选择合适正确的运动副。
RollSlidePointPointJointJoint一个机构要想运动,通常会有一个或多个驱动,具体要根据机构形式而定。
可以在第二步定义约束的同时进行驱动命令的定义。
例如对于圆柱副,既可以定义角度驱动,又可以定义长度驱动,或者同时定义角度驱动和长度驱动。
完全约束的条件:每个运动副约束的自由度不同,而每个驱动命令只能约束一个自由度,当机构的自由度为零时,为完全约束(小于零为过约束,大于零为欠约束);这时系统会提示你,机构已经可以模拟了:4.设置传感器设置传感器来监测动态仿真过程,比如间隙值、碰撞、速度和加速度等。
在动态仿真过程中,可以根据传感器测量的数据来分析检查样机的设计情况。
常用以下几个命令Clash (碰撞分析);Distance & Band Analysis (距离和区域分析);Speed and Acceleration (速度和加速度测量)等。
(1)距离和区域分析:用于测量一个组内或者两个组内物体之间的最小距离。
在装配或运动分析中还可以进行动态测量。
点击命令: Name :自定义名称或者选择默认名称;Type :测量类型,一共有5种;Mimimum ,Along X ,Along Y ,Along Z ,Band Analysis定义驱动命令计算类型,有三种;Between two selection 在两个选择物体之间;Inside one selection 在一个选择物体之内;Selection Against All 选择物体与所有未选择的物体之间。
CATIADMU运动机构仿真教程

CATIADMU运动机构仿真教程CATIA是一款广泛应用于机械设计和制造领域的三维建模软件,而DMU(Digital Mock-Up)则是CATIA的一项重要功能,它能够在虚拟环境中对机械产品进行完整模拟和测量。
本篇文章将重点介绍如何使用CATIA DMU进行运动机构仿真。
首先,我们需要打开CATIA软件,并新建一个机械装配模型。
在装配模型中,我们可以选择和放置各种零件,然后使用约束关系将它们链接在一起,从而形成一个机械运动机构。
在确定机构设计之后,我们需要进行运动仿真来验证其运动性能和机构强度。
在装配模型中,选择"DMU Kinematics"工具栏中的"Module Creation"来创建一个新的运动模块。
然后,在"Product1"下创建一个新的机构,命名为"Motion"。
在"Motion"中选择"Insert",然后选择"Mechanisms"来添加运动机构零件。
接下来,我们需要选择合适的约束关系来定义机构的运动自由度。
在CATIA中,可以使用各种约束关系来模拟机构零件之间的运动关系,比如:旋转关节、滑动关节、齿轮齿条传动等。
例如,我们可以选择两个零件之间的旋转关节来定义它们之间的旋转运动。
在"Motion"中选择"Insert",然后选择"Rigid"关节来添加一个旋转关节。
然后选择两个需要链接的零件,按住Ctrl键并点击它们。
CATIA将自动在两个零件之间创建一个旋转关节。
设置旋转关节的旋转轴和角度范围后,即可完成约束的定义。
定义完所有的约束关系后,我们可以通过点击"Close"来关闭约束定义窗口。
然后选择"Motion Analysis"工具栏中的"Define Simulation"来定义仿真参数。
CATIA运动分析(DMU)
运动分析培训
3.4 RIGID JOINT(刚体接头)
该命令可以约束6个自由度 通过刚体接头,可以使两个零件成为一个刚体。成为刚体以后,两个零件彼此间的相对 位置将不改变
运动分析培训
3.5 POINT CURVE JOINT(点-曲线接头)
该命令可以约束2个自由度 通过点-曲线接头,可以让一个点沿着某曲线移动,点与曲线分别位于不同的零件上, 如此零件(点)即可沿着曲线路径移动。设置此接头时,点必须位于曲线,即点与曲线 的距离为零,因此要在assembly design中进行好组装再使用此接头。
运动分析培训
3.6 POINT SURFACE JOINT(点-曲面接头)
该命令可以约束1个自由度 通过点-面接头,可以让一个点在一个平面上移动。点与曲面分别位于不同的零件上, 如此零件即顺着曲面的弧度与高低而移动。设置此接头时,点必须位于曲面上,即点与 曲面的距离为零,因此要在assembly design中进行好组装再使用此接头。
该命令可以约束4个自由度 通过圆柱接头,可以让两个零件绕一轴转动,并沿此轴向移动。这两个零件在结合处必 须各有一个轴线,将两个零件的轴线重合,即成为具有两个自由度(旋转和平移)的圆 柱接头,此两个自由度各自独立,互不影响。
运动分析培训
3.3 SPHERICAL JOINT(圆球接头)
该命令可以约束3个自由度 通过圆球接头,可以让两个零件绕一圆心转动,这两个零件在结合处必须有一个圆心, 将两个零件的圆心重合,即成为具有三个旋转自由度的圆球接头。此三个自由度各自独 立,互不影响。
保密等级:★ ★
CATIA运动分析
编制
校对
审核
批准
目 录
1、运动分析模块介绍 2、基础介绍 3、命令介绍 4、注意事项 5、举例
catiaDMU运动机构解读
CATIA数字样机仿真机构分析CATIA数字样机仿真机构分析 (1)绪论 (2)细节分析 (3)运动仿真的流程 (4)相关概念 (5)重点一一理解各运动副的概念和创建要素 (7)基本运行与位置调整 (10)基于运动函数的模拟 (10)综合模拟 (11)序列编辑与重放 (13)基于运动仿真的数字样机分析 (14)运动副运动规律的查看与保存 (15)运动参数测量 (15)机构运动轨迹分析 (16)扫掠包络体 (17)空间分析 (18)绪论相对于物理样机,数字样机的优点不言而喻,在很大程度上可以代替物理样机的作用,随着数字样机技术的发展和日益成熟,今后会在更大的程度和更多的方面取代物理样机,提高产品的研发效率和技术水平。
学习Catia数字样机需要掌握主要几大块内容:1、工作窗口的构成和功能2、运动仿真流程的掌握3、各种运动副的运用4、基本运动学原理的掌握5、仿真机构的运行与重放6、基于运动仿真的数字样机分析技术细节分析该模块位置:CATIL Digital Mock Up — DMU kin ematicsDMU Generk Animation DMU-般动画各工具按钮的作用需要在实践操作中一步步掌握和数字, 非一朝一夕 的功夫可以消化,其基本功能都是相对简单的,但是要综合运用,必 须勤加练习细细领悟。
运动仿真的流程工具栏主要:有DMU 运动机构Kinematics运动机构更新 四大块。
以及DMI 空间分析3D数字模型—数字样机准备—静态装配(包括全面静态装配后删除限制运动的约束后自动创建运动副、全面静态装配后通过对话框利用相关约束手动创建运动副)或者直接手动创建运动副—所有必要基础运动副创建完成—分析是否需要建立关联运动副并创建—定于仿真过程中的固定件(机械装置自由度DOF变为1)—施加驱动&制定运动法则(直到机械装置自由度DOF为0)—运动模拟与分析。
相关概念1、完整的静态约束:具有装配关系的两个零部件间有3个能够限制或者规定其3D空间全部自由度的约束,保证数字样机上每一个零部件均具有空间中的唯一位置。
CATIA常见运动仿真机构命令详解
结合都是随动件。
模拟的,必须与其他形式的结合配合 通用结合是两个旋转结合的复合,将第一个旋转结合进行驱动的设置,第二个旋转不用设置驱动,通过通用结合,就是讲第二个旋转
、球面结合介绍(又名球面副)
仅直线移动运动
球面合
1、点击
按钮,弹出右图1窗口:
图1
2、点击 右上角“新机械装置”,弹出图2窗口: 图2
1、单击“确定” 按钮,弹出图3窗口:
图3
3、所有铰定义命令详解
、球面结合介绍(又名球面副)
4、在窗口中,点1点选球头面, 自动识别球心:点2点选球套面, 自动识别球心位置,如右图4所 示,也可现在part中建立球心点, 然后点选时只需只直接选取点 就行,选取完毕之后点击确定, 点击确定之后,两球心会相结 合在在一起。
1、点击 按钮,弹出右图1窗口:
一个圆柱结合限制2个移动副,2个旋转副。
接下来讲解的每个结合均是如此,不再反复强调))
5、单击
中的 按钮,此时系统并未自动弹出“可以模拟机械装置”窗口,在逻辑树种打开“机械装置”,发现此
时合滚的一动自 起由使曲度用=。线3,结并不合等于是0,指所一以只条有“点球面沿结合着”和另“固一定件条”的情况下,是不能进行仿真的,“球面结合”必须和其他带有驱动性质的结
直线移动和旋转移动
圆柱结合
1、点击
按钮,弹出右图1窗口:
图1
2、点击 右上角“新机械装置”,弹出图2窗口: 图2
1、单击“确定” 按钮,弹出图3窗口:
图3
3、所有铰定义命令详解
、圆柱结合介绍(又名圆柱副)
4、图中“直线1”、“直线2”分 别选取螺栓轴线、螺母轴线,并点 选“启动角度”、“启动长度”按 钮,如右图4所示,并单击“确定” (备注:圆柱结合从动件即可沿轴 向转动,也可同时沿轴向移动)
CATIA运动学仿真总结08014
CATIA DMU模块在悬架和转向系统中的应用1. 前悬架和转向系统的装配模块本文前悬架为麦弗逊悬架,转向机为齿轮齿条转向机,悬架和转向系统的运动仿真DMU共分为18个part,包括副车架、左右下摆臂、左右转向节、左右滑柱、转向机、左右转向拉杆、左右传动轴、左右举升台、左右横向稳定杆拉杆、左右横向稳定杆。
为满足运动仿真要求,其中横向稳定杆被分为左、右两个part,以实现横向稳定杆不同方向的扭转;增加了左右举升台,模拟不平路面时车轮的上下跳动。
打开CATIA,进入Assembly Design模块,并将上述各部件调入到同一个product 里。
2. 前悬架和转向系统的运动仿真2.1 运动约束revolute prismatic spherical u joint进入CATIA 的DUM Kinematics 模块,添加运动约束,具体步骤如下: >首先将固定副车架固定Fixed ,并在副车架上做出滑柱上点,下摆臂转动轴 线,转向机中心线。
>左下摆臂与副车架连接为revolute ,限制5个自由度,系统还有1个独立自由度运动约束工具条(点击revolute 下拉菜单弹出)物体1上的 参考平面>左下摆臂与左转向节连接为spherical ,限制3个自由度,系统还有4个独立自由度Spherical joint>左转向节与左转向拉杆连接为spherical ,限制3个自由度,系统还有7个独物体1 (副车架) 上的旋转轴物体2 (下摆臂) 上的旋转轴两参考平面 间距离关系Revolute joint物体1上的 参考平面物体2上 的球心物体1上 的球心立自由度>左转向拉杆与转向机连接为u joint,限制4个自由度,系统还有9个独立自由度Spin 1: | 'Cross-pin axis directionO Normal to spin 1 Normal to spin 2Universal joint》转向机与副车架连接为prismatic ,限制5个自由度,系统还有4个独立自 由度>左滑柱与左转向节连接为Cylindrical ,限制4个自由度,系统还有6个独立 自由度Joint 0at ion: U JointMechanism echanism. 1 'lew Mechani smJoint nameJoint. 30Current selection : Spin 2: O物体2上的滑行方向(直 线,与1的直线重物体1上的滑行方向(直Prismatic joint物体1上的平面物体2上的平面(与1的平面贴Cylindrical joint>左滑柱与副车架连接为u joint,限制4个自由度,系统还有2个独立自由度>左举升台与左转向节连接为point surface,限制1个自由度,系统还有7个独立自由度Point surface>左举升台与副车架连接为Prismatic,限制5个自由度,系统还有2个独立自由度>横向稳定杆(左)与副车架连接为revolute,限制5个自由度,系统还有3 个独立自由度>左横向稳定杆拉杆与横向稳定杆(左)连接为u joint,限制4个自由度,系统还有5个独立自由度>左转向节与左横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有2个独立自由度>右下摆臂与副车架连接为revolute,限制5个自由度,系统还有3个独立自由度>右转向节与右转向拉杆连接为spherical,限制3个自由度,系统还有9个独立自由度>右转向拉杆与转向机连接为u joint,限制4个自由度,系统还有5个独立自由度>右滑柱与右转向节连接为Cylindrical,限制4个自由度,系统还有7个独立自由度>右滑柱与副车架连接为u joint,限制4个自由度,系统还有3个独立自由度>右举升台与右转向节连接为point surface,限制1个自由度,系统还有8个独立自由度>右举升台与副车架连接为Prismatic,限制5个自由度,系统还有3个独立自由度>横向稳定杆(右)与副车架连接为revolute,限制5个自由度,系统还有4 个独立自由度>右横向稳定杆拉杆与横向稳定杆(右)连接为u joint,限制4个自由度,系统还有6个独立自由度>右转向节与右横向稳定杆拉杆连接为Spherical,限制3个自由度,系统还有3个独立自由度>左传动轴与左转向节连接为u joint,限制4个自由度,系统还有5个独立自由度>左传动轴与副车架连接为point curve,限制2个自由度,系统还有3个独立自由度Point curve>右传动轴与右转向节连接为u joint,限制4个自由度,系统还有5个独立自由度运动约束如下表所示:注:系统此时的自由度数=各个约束限制的自由度数的和+当时系统的独立自由度数。
CATIA运动(DMU)
运动分析培训
2、基础知识介绍
自由度的计算: 根据零件的数量计算自由度,自由度的计算公式: 高副: 凡两构件系通过点或线接触而构成的运动副统称为高副 低副: 两构件通过面接触而构成的运动副统称为低副;
运动分析培训
例如:四连杆机构 自由度的计算: F=3*3-2*4=1 机构可以实现运动。
运动分析培训
4、注意事项
当所有的机构约束好以后,整个相 关联的运动机构的自由度(DOF) 会变成零。这时候把运动过程中固 定的部位用FIX命令约束,运动副 即可按约束运动。
运动分析培训
Simulation(模拟步骤)
点击simulation命令,会出现选择 模拟的运动的过程、重复的次数。
运动分析中的约束,都是通过点、 线、面三个几何元素进行约束。两 个件之间无非是点-点、点-线、点 -面、面-面等几个元素之间的连接。 所以分析机构的运动原理是关键, 原理分析清楚之后,根本无需计算 机构的总自由度,因为软件可以自 行计算。然后通过正确合理的约束 即可达到运动要求。点、面必须按 照要求做出,否则约束会提示错误。
用点在面上约束掉一个自由度 约束完成,所有自由度为零
加上驱动去掉一个约束
运动分析培训
添加固定部件,出现如图的提示,既完
成运动分析的所有约束。
该机构可以模拟运动
运动分析培训
点击simulation进 行模拟,插入模拟 的过程,运动分析 完成。 气弹簧、叉臂式玻 璃升降器、门的闭 合过程、锁开启过 程、滑门等运动机 构的运动分析也有 实例,如果兴趣的 同事可以私下交流。
3、常用命令介绍
3.1 revolute(实体接头)
该命令可以约束5个自由度
该命令用两零件之间的线和面作为约束条件,两线必须同轴,面可以不重合,选择
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8 滚动曲线副 曲线1:零件1上的相切曲 线 曲线2 零件2上的相切 曲线 驱动长度:选择作为驱动 条件 注:曲线1与曲线2要想保 证相切,再进行该运动副 的建立
9 点与曲面副 定义此运动副之前, 点一定要在事先确认 的曲面上。
10 万向副
转动1:零件1的转动轴线 转动2:零件2的转动轴线
3 圆柱副 线1:零件1的轴线 线2:零件2的轴线 驱动角度:选择沿轴向转动为驱 动条件 驱动长度:选择沿轴向移动为驱 动条件 注:以上两个驱动可以根据实际 情况选择,也可以都不选
5 球形副 点1:零件1的球心(可以是球心, 也可以是独立的一点) 点2:零件2的球心(可以是球心, 也可以是独立的一点) 注:此球副无法作为驱动副
14 绳索副
说明:绳索副可 视为两个楔形 - 移 动副的结合 。
提示:比例中的 值为: 1, -1,2, 2 等时,运动是什 么状态?试试看。
CATIA常见运动仿真机构命令详解
1 旋转副
线1:零件1的轴线 线2:零件2的轴线 平面1:零件1的轴端平面 平面2 零件2的轴端面 无用的补偿值(表示两面贴 合)偏移=mm(表示两面彼 此相距mm)
注:若上图所示,两个零件 轴端面不是重合,二十端面 对称,则可以启动平面 3 和 平面4,选择,有圆心的 平面3:零件1轴的另一端面, 平面4:零件2轴的另一端面, 有圆心的(表示对称) 导向角度:表示此转动副为 驱动副
选择“任何”选项时需在零件上 选择一个与轴 1 或者轴 2 垂直的直 线或方向
11 CV连接副 与万向节类似
12 齿轮副 各个参数解释: 说明:定义齿轮副 需要两个旋转副, 如果已经定义好的 旋转副,可以直接 在左侧的树种直接 选取,若未定义旋 转副,也可以在齿 轮副对话框中点击 建立来创建。旋转 连接1:齿轮1的旋 转副 1 ;旋转连接 2 : 齿轮2的旋转副2。 比例:两齿轮的传 动比(可以输入数 值或者点击来定义 输入齿数自动计算。 旋转方向 相同(为 同向) 相对(为反 向),旋转 1 的驱动 角度:将旋转 1 作为 驱动条件,旋转 2 的 驱动角度(同理)
6 点与曲线副
曲线 1:作为轨迹的零件 1中的 空间曲线 点 2 :零件 2 上的沿轨迹线运动 的点 驱动长度:选择作为驱动条件
注:定义此运动副之前,点一 定要在先定义的曲线,否则会 出错。
பைடு நூலகம்
7 滑动曲线副
线1:零件1上的相切曲线 线2:零件2上的相切曲线 注:此两条曲线一定要先确 认好相切,再定义运动副, 此运动副不可以作为驱动副