电动转向系统的台架试验
汽车电动助力转向装置试验台测控系统的研究与开发
汽车电动助力转 向系统 ( l tcP w r t r g Ee r o e S e n , c i ei
简 称 E S 是 一种 采 用 蓄 电池 提 供 能量 ,由 电子 控 制 P)
单元 ( C )根据 车辆 的不 同行驶 状况 而驱 动助 力 EU
电机 提供 相 应 大 小 助 力 的 转 向装 置 。 由于 E S中 装 P
1 试 验 台结构与 工作原理 我 国的 《 汽车 电动助力 转 向装 置技术 条件 与台 架试验方法》 中对 于 E S的试验 检测方 法与 条件做 P 出了初步的规定。本试验台是针对性能试验要求而设
计的。在性能试验 中主要 是让 E S工 作在不 同的车 P 辆行驶条件下 ,然后检测其助力转矩 、电流和电压变 化。因此 ,在本试验 台中设置不同的装置分别 向 E S P 加载和检测 E S力矩 、电流和 电压值 的大小 即可 以 P 测试 出其相关的性能参数。 根据 E S性 能检测试 验 标准要求 ,所设 计 的试 P 验台主要 由加载装置 、车速和发动机转速信号发生装
i mme aey. Th e tb d v n a c aey ts he p rom a e p r mees o h e t d EPS. ditl e ts— e a c urtl e tt ef r nc a a t r ft e tse Ke w o ds Elc rc p we te i g; Te tng& c nr ls se ; Daa a q iiin; DM A y r : e ti o rse rn si o to y tm t c u st o
mu t.un t n d t c u sto ad wee u e o c le tte d t ft e td EPS, DM A t c u st n meh s u e n t e ts— lif ci aa a q iiin c r r s d t ol c h aa o het se o daaa q iii todwa s d i h e t o
《汽车电动助力转向装置技术要求和试验方法》编制说明
(5)振动 考核目的是检查车辆在行驶过程中振动环境下抗振动能力。
c.主要验证情况分析
标准起草单位对国产的所有结构型式的电动助力转向装置进行了大量的验证试验,通过 对验证试验数据的分析,工作组确定了标准的技术性能要求。
验证结果
检验项目
要求无明 显振动,在任意角度停下时不应有惯 性延时现象。
国内先进水平。
g. 与相关标准协调性
与相关标准没有冲突矛盾。
h. 重大分歧意见处理经过和依据 本标准在起草过程中,无重大分歧意见。
i. 标准性质建议说明
建议为推荐性标准。
j. 贯彻标准的要求和措施建议
按行业标准组织实施。
k. 废止现行相关标准的建议
无
l. 其它应予说明的事项
无
标准起草工作组 2012-09-20
2004 年 5 月由标准起草工作组组织工作组成员及相关专家 64 位代表参加的重庆会议上, 工作组通过征询相关专家提出的意见,对标准草案进行再一次广泛讨论和确定。在此基础上 标准起草小组进行了试验验证分工、会后进行了广泛的、大量的试验验证工作。确定了汽车 电动助力转向装置标准的试验验证稿。
2004 年 12 月为了使工作组成员能对电磁兼容性试验内容有基本的了解,在哈尔滨风华 科技有限公司的支持下举办了专门的电磁兼容性试验研讨会, 共 32 位专家代表参加,请全 国汽车标准化技术委员会电子电磁兼容分技术委员会的专家宣贯了国家电磁兼容标准,同时 在专家的协助下确定了汽车电动助力转向装置标准电磁兼容试验的相关标准条款,并在哈尔 滨风华科技有限公司的电磁兼容试验室进行了电磁兼容验证试验。
d. 专利涉及情况 本标准未涉及专利。
e. 预期达到的社会效益、对产业发展的作用 随着我国汽车工业的飞速发展,汽车转向系统电子化将成为今后必然趋势。汽车转向系
转向系统硬件在环(HIL)测试台架解决方案
转向系统硬件在环(HIL)测试台架解决方案一、背景汽车转向系统作为汽车底盘四大系统之一,从传统的液压助力转向系统(HPS)逐渐发展到现在的电动助力转向系统(EPS)。
在伺服电机和大量辅助系统支持下,已不再单纯的用于转向目的,随着智能驾驶技术的发展,ADAS/AD系统也离不开EPS的参与,例如LKAS、智能纠偏避障控制等一系列功能的实现。
随着越来越多软件功能集成,新的驾驶辅助系统的加入,极大的增加了对转向系统的稳定性,高性能开发测试的需求。
基于HiL的转向系统测试台架可以实现实车试验条件下难以达到的测试条件,比如安全保障、外部环境条件、边界极限,事故重现和故障注入等。
基于HIL的转向系统测试台架,可以在整车试装前高效重复调试转向系统性能,测试更加接近实车,从而加快我们的开发测试流程和效率。
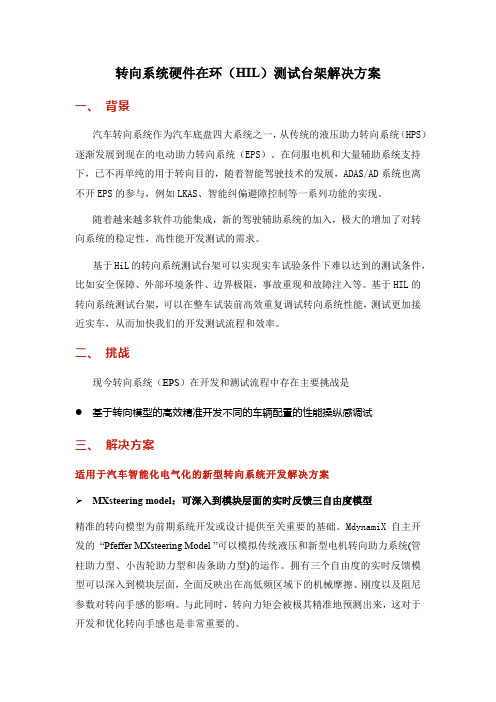
二、挑战现今转向系统(EPS)在开发和测试流程中存在主要挑战是●基于转向模型的高效精准开发不同的车辆配置的性能操纵感调试三、解决方案适用于汽车智能化电气化的新型转向系统开发解决方案➢MXsteering model:可深入到模块层面的实时反馈三自由度模型精准的转向模型为前期系统开发或设计提供至关重要的基础。
MdynamiX自主开发的“Pfeffer MXsteering Model ”可以模拟传统液压和新型电机转向助力系统(管柱助力型、小齿轮助力型和齿条助力型)的运作。
拥有三个自由度的实时反馈模型可以深入到模块层面,全面反映出在高低频区域下的机械摩擦、刚度以及阻尼参数对转向手感的影响。
与此同时,转向力矩会被极其精准地预测出来,这对于开发和优化转向手感也是非常重要的。
该转向模型已经在dSPACE ASM,、IPG CarMaker 和 VI-CarRealTime 的整车模型中运用。
用户也可以集成在 MATLAB/Simulink 中与其他模块比如个性化的ECU 控制系统集成或者结合ADAS 控制系统进行仿真试验。
使用动力总成台架实现实车转鼓台架测量项目的测试方法与制作流程
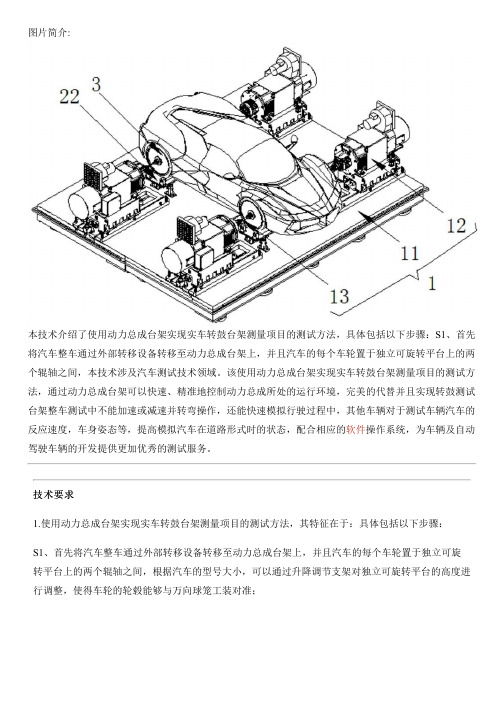
图片简介:本技术介绍了使用动力总成台架实现实车转鼓台架测量项目的测试方法,具体包括以下步骤:S1、首先将汽车整车通过外部转移设备转移至动力总成台架上,并且汽车的每个车轮置于独立可旋转平台上的两个辊轴之间,本技术涉及汽车测试技术领域。
该使用动力总成台架实现实车转鼓台架测量项目的测试方法,通过动力总成台架可以快速、精准地控制动力总成所处的运行环境,完美的代替并且实现转鼓测试台架整车测试中不能加速或减速并转弯操作,还能快速模拟行驶过程中,其他车辆对于测试车辆汽车的反应速度,车身姿态等,提高模拟汽车在道路形式时的状态,配合相应的软件操作系统,为车辆及自动驾驶车辆的开发提供更加优秀的测试服务。
技术要求1.使用动力总成台架实现实车转鼓台架测量项目的测试方法,其特征在于:具体包括以下步骤:S1、首先将汽车整车通过外部转移设备转移至动力总成台架上,并且汽车的每个车轮置于独立可旋转平台上的两个辊轴之间,根据汽车的型号大小,可以通过升降调节支架对独立可旋转平台的高度进行调整,使得车轮的轮毂能够与万向球笼工装对准;S2、车轮的轮毂通过万向球笼工装连接在动力总成台架的测功机上,辊轴用轴承座支撑后,固定在独立可旋转平台上,测试装配完成后,开始进行测试,测功机的扭矩以及转速控制特性好,精确快速的跟踪扭矩以及转速命令,模拟发动机扭矩转速和车轮端负载扭矩转速,从而对发动机的性能进行测试;S3、当测试要求车身姿态进行转变时,转动汽车方向盘,使得车轮转向,此时启动转向电机,转向电机带动独立可旋转平台进行转动,使得车轮与测功机之间的角度发生变化,同时转向电机按照车轮转向的加速度同步进行转向,在车轮转向时,车轮同测功机的角度由万向球笼工装实现,并且通过万向球笼工装传递扭矩,即可实现对整车进行加速或减速并转弯操作的测试,还能快速模拟行驶过程中,其他车辆对于测试车辆汽车的反应速度的测试。
2.根据权利要求1所述的使用动力总成台架实现实车转鼓台架测量项目的测试方法,其特征在于:所述步骤S1中独立可旋转平台设置有四个,汽车的四个车轮分别位于动力总成台架上的四个独立可旋转平台上。
汽车电动助力转向系统性能测试系统设计
汽车电动助力转向系统性能测试系统设计廖林清;石宏春;张君;王伟【摘要】根据汽车电动助力转向系统性能测试台架试验要求,采用VB6.0作为测试系统软件开发平台,以MPC08SP运动控制器作为交流伺服电机的上位控制单元对输入端转角、转速等进行控制,采用电液比例控制方式对输出端力、速度等进行加载,实现不同工况下转向阻力矩的模拟加载.最后对某技术成熟的电动助力转向系统进行性能测试.试验结果表明:该测试台架能稳定运行、测试精度高,可快速地实现电动助力转向系统自动化测试.%According to EPS performance test bench test requirements,VB6.0 is used as the test system software development platform,MPC08SP motion controller is used as the upper control unit of AC servo motor to realize input end drive control, and electro-hydraulic proportional control technology is used to realize the output end Drive control to realize the simulation loading of the performance of the electric power steering system in different working conditions.Finally,through a performance test of a mature electric power steering system technology.The test results show that the test system can operate stably with high test accuracy,and can quickly realize the automated testing of the electric power steering system.【期刊名称】《重庆理工大学学报(自然科学版)》【年(卷),期】2018(032)006【总页数】6页(P41-46)【关键词】电动助力转向系统;电液比例控制;性能测试;助力特性【作者】廖林清;石宏春;张君;王伟【作者单位】汽车零部件先进制造技术教育部重点实验室,重庆 400054;汽车零部件先进制造技术教育部重点实验室,重庆 400054;重庆理工大学机械工程学院,重庆400054;重庆理工大学机械工程学院,重庆 400054【正文语种】中文【中图分类】U463电动助力转向系统(electric power-assistant sterring,EPS)相比液压助力转向系统更节能、环保,并能兼顾汽车低速转向轻便性和高速直线行驶稳定性,因此得到了广泛的应用,是当前动力转向技术研究的主要方向。
浅谈汽车液压动力转向器台架试验方法

目盈圈
万方数据
Automobile Parts
2013.1
054
Abstract:This article has carried on the analysis to the electrically controlled commonly used temperature breakdown phenomenon and the reason.and the general method which
2013.1 AutOmobile Parts
053
国习鄹
万方数据
差别:在输出端施加最大输出力矩8%的载荷,减少到了
6%.
动;分别在无动力和流量为Q。两种情况进行:试验时各取左右最大 转角的90%范围测量,并进行数据处理。绘制齿条移动力与位移之
3、内泄漏试验
间的关系曲线,如图2所示。
老标准规定:将总成安装在试验台架上,把输出端刚性地固 定在直线行驶位置,在输入端施2J1]2倍总成最大工作压力下转向 力矩.测量从高压腔流向低压腔的泄漏量。测定时间为20s,记
r fu rthe r reviSing testing method of automotive hyd rauIiC power stee ring Platfo rm,whiCh are suitabIe to nationaI statuS in China.In the foIlOWing,COmpa risons made,and explanations are added to aII main items,whiCh have qUite big Changes
(最新整理)第十章汽车电动助力转向系统
生的反电动势形成阻碍电机继续旋转的阻尼转矩,改变占空比,即改变了阻尼转矩的
大小。
2021/7/26
19
三、电动助力转向的控制逻辑
图10 助力电动机控制逻辑
2021/7/26
20
四、电动助力转向的控制流程
2021/7/26
图11 控制软件流程图
21
10.4电动助力转向系统实例
一、富士重工电动助力转向系统
控制三极管基极电流
信号触发端
a1端得到输入信号时电动机 有电流通过而正转
a2端得到输入信号时电动机 有电流通过而反转
13
4、离合器:离合器采用干式电磁式离合器,其功能是保证EPS在预先设定的车速范围内闭合。
当车速超出设定车速范围时,离合器断开,电动机不再提供助力,转入手动转向状态。另外,当 电动机发生故障时,离合器将自动断开。
3、控制系统的功能
(1)控制助力转矩的功能
车速感应控制型助力转向系统是由车速控制
助力转矩的系统,在每一种车速下都可以获得最优化的转向助力转矩。
2021/7/26
图13 全电子控制的助力转向系统助力转矩特性曲线
23
系统还可根据转向转矩变化率、转向角速度和转向角进行控制,以 改善瞬态转向灵敏度.
图14 控制功能框图
的变化,把主副两个系统的脉冲信号传送给ECU,由于是两个系统,因此信号的可靠性提高 了。
3、电动机: EPS的动力源是电动机,通常采用无刷永磁式直流电动机,其功能是根据ECU
的指令产生相应的输出转矩。转向助力用的电动机需要正反转控制。一种比较简单适用的转
向助力电动机正反转控制电路如图4所示。
图420电21/动7/2机6 正反转控制电路
图10-3 电动助力转向系统 结构示意图
汽车电动转向管柱总成台架试验设计与开发
二 蠹
1 5
—
—
2m h k/
卜 lk / 4mh O. 5 m/ - k h -2
再 左 转 到 电 机 电 流不 再 上 升 为 止 ,记 录 该 车 速 情 况 下 电 动 机 工 作 电流 和 驱 动扭 矩 的关 系 曲线 。试 验装 置 原 理 框 图 见 图 4 。
一
汽车 在 同一 路 面 上 和 同 一 车 速下 进行 转 向 时 ,助力 电动 机
电 流 随转 向扭 矩 (- ) - 力 的增 加而 增 加 , 特 性 称 为 手 力 特性 。 T 此 手 力 特性 曲线 见 图 2 。从 图 2可 以 看 出 :
定 值 , 动 输 入 端 右 转 到 电 机 电流 不 再 上 升 为 止 , 到 中 位 , 驱 回
转 向助 力 扭 矩 。
2 电动 转 向管 柱 总 成试 验 项 目和 台架 试 验 方 法
2 1 手 力 特 性 .
图 3
样 品 接 线 图
2 车 速 传感 器 信 号 、 火 信 号 分 别 由脉 冲信 号 发 生 器 模 拟 ) 点 ( 冲 幅值 0 1 V 。将 点 火 信 号 的 频 率 调 在 1 H  ̄ k z之 间 脉 —0 ) 1 z 2H 任 一 个 值 , 目 的是 让 电磁 离 合 器 结 合 。 其 3 将 电 动 转 向传 动 轴 输 出端 刚性 固 定 , 速 信 号 频 率 调 至 ) 车
台架 试 验 方法 和步 骤 : 1按 照样 品接 线 图接线 。图 3是某 一 样 品的 接线 框 图 , 般 ) 一
向 管 柱 总 成 由传 感 器 ( 向 扭 矩 传 转 感 器 、 速 传 感 器 、 火 信 号 )控 制 车 点 、 器 和 执 行 机 构 ( 动 机 、 电磁 离 合 电 器 、 速 装 置 ) 组 成 。转 向扭 矩 传 减 等
电动助力转向系统试验分析
电机 工 作 电流 跟 踪 方 向盘 输 入 转 距试 验 曲线
如 图3 所示 。
称 ,只需测 试逆 时针转 向并 回正 的过程 。 由图3 可知 ,在低 车速 时 电动机 工作 电流响应 平稳 ,对方 向盘转距 具有较 好 的跟 踪效 果 ,但在 高 速 时 ,电动机 工作 电流对方 向盘转 距 的跟踪效 果不 是很 好 ,这 是因为在 高车速 时 ,E S 力作用不 大 P助
向盘转 至任意角度停 下,转向器输 出端不应有惯性延
时现象 。惯性延时是 指电动助 力转 向系统在工作过程
洛 阳理 工学 院学报f 自然 科 学 版 1
第 l卷 8
中,当停止转 向盘后 ,电动机仍然继续转动 的现象。
速 ( 至 最 高 车速 ,间 隔5k h2 m/ )下 , 从0 m/.0k h 在 不使用 电动助力 和使用 电动 助力 的两种情 况下 , 分 别记录转 向系统 试验 数据 并加 以比较 。试验 分两
转 向轻便性试验1 ,并对试验 结果进行 了分析 。试验结果表明E s P 系统性能 良好 ,方向盘可操作 性好 ,能很好地 实
现 助 力 效果
关键 词 : 电动助 力转 向; E S 验 ; 试 验 结 果 ;助 力效 果 P试
中图 分 类 号 : 6 .+ U4 752
文 献 标识 码 : B
V o .8 N o 2 11 .
De .2 0 c 0 8
电动 助 力 转 向系 统试 验 分 析
徐春华 ,牛继高
(. 1武汉理 工大学 汽车工程学院,湖北 武汉 4 07 ;2重庆交通大学 机 电与汽车 工程 学院, 30 0 . 重庆 4 07 ) 0 0 4
拖拉机前轮转角台架试验研究
200年月第期拖拉机前轮转角台架试验研究摘要:以采用步进电机驱动全液压转向器工作的农业车辆为研究对象,设计了台架试验,针对拖拉机常用角度进行静态采样,通过对采样数据进行递推平均值滤波,结合最小二乘法的求解出角位移传感器WYT-AT-2B与TN654拖拉机前轮转角函数关系;其次,提出了一种基于卡尔曼滤波的前轮转角状态估计模型,实现对前轮转角的预测与追踪。
试验结果表明,该方法在静态条件与动态条件下效果较好。
关键词:前轮转角递推平均值滤波状态估计中图分类号:文献标识码:文章编号:0前言随着智能化精细化农业的蓬勃发展,自动转向控制系统是实现农业机械自动导航的关键技术之一。
目前,自动转向执行常用方法有电动机控制和电液控制两种。
前轮转角一般作为转角控制器的输入量,为达到精准执行的方法主要有PID模型、模糊控制模型及最优控制算法[1-3]。
但是针对拖拉机台架的试验研究较少,拖拉机台架试验作为田间试验的基础与系统测试的重要保障。
针对以上问题研究,选择TN654拖拉机作为研究对象,采用步进电机加全液压转向器方案实现拖拉机转向,通过台架试验数据处理与分析,构造角位移传感器与前轮转角的函数关系,为前轮转角状态估计提供参考依据。
其次,提出了一种基于卡尔曼滤波的前轮转角状态估计模型,经过静态条件与动态条件测试,效果较好。
1台架试验设计收稿日期:拖拉机台架试验,一方面检验测试步进电机加全液压转向器系统的性能,一方面获取拖拉机转向部分性能参数,因此台架试验是路径跟踪试验的基础与保证。
其中台架试验步骤如图1所示。
其中笔记本电脑模拟上位机通过USB接口发送转角指令,执行部分控制器接收到指令后开始执行。
执行部分控制器发送脉冲数,通过步进电机驱动器来驱动步进电机,步进电机转动带动全液压转向器,实现前轮转角。
数据采集芯片采集角位移传感器信息通过串口RS-232发送给笔记本电脑,笔记本电脑通过串口助手接收信息。
图1 台架试验流程图Fig.1 The flowchart of experiment1.1实验条件台架试验系统主要由TN654拖拉机、执行部分控制器,步进电机驱动器,步进电机,角位移传感器,数据采集芯片等,设备参数如表1所述。