ContolLogix系统选型及RSLogix5000软件介绍
实验2_RSLogix5000软件应用2_CompactLogix v1.0
4.组织数据 10)右键点击 Controller Tags,选择 New Tag,新建标签数据。输入标签的名称、
描述(可选),选择标签类型和数据类型等,然后点击 OK。
Lab2.2- 12 -
Lab material for RSLogix5000
HuaZhang Electric Custom Training
请按步骤:
1.新建工程
1) 点击
,打开 RSLogix5000 编程软件。
2) 选择 File →New,或者点击“新建”工具,创建一个工程。
点击这里 3) 新建控制器,选择控制器类型、版本,并输入控制器的名称、描述(可选),
指定项目保存目录,然后点击 OK。
Lab2.2- 1 -
Lab material for RSLogix5000
Period:如果定义了任务类型为周期性,在这里设置任务的触发周期。 Priority:如果定义了任务类型为周期性,可以通过输入 1 至 15 的编号来指定任务
的优先级;编号越低,优先级越高。连续性任务的优先级最低,可以随时被 任何周期性任务中断。CompactLogix 控制器使用一个专用的、优先级为 7 的周期性任务处理 I/O 数据,这个任务以 CompactBus 总线扫描周期 RPI 时 间执行。 Watchdog:看门狗定时器用于监控任务的执行,它在任务启动时开始计时,任务 执行完毕后停止;如果达到预置的定时值,将产生一个主要故障。
选择 Fault /Program Action
该窗口用于定义模块在编程模式和故障模式下的输出状态。 CompactLogix 控制器不支持本地 I/O 模块保持最后状态或用户自定义安全状
态,如果一个本地 I/O 模块失效,例如,丢失与控制器的通讯,或者在带电的情况 下任何模块从系统总线上断开,控制器会进入故障模式,所有的输入将为 OFF 状 态。
rslogix5000软件介绍
一、 控制器项目的创建一个首次使用,或者Firmware刷新后,或内存丢失的控制器,是不能直接在线连接的,必须将项目下载到控制器。
一般的,先在离线状态下建立一个项目,进行组态和编程,然后下载到指定的控制器。
下面,首先学习创建一个项目的操作。
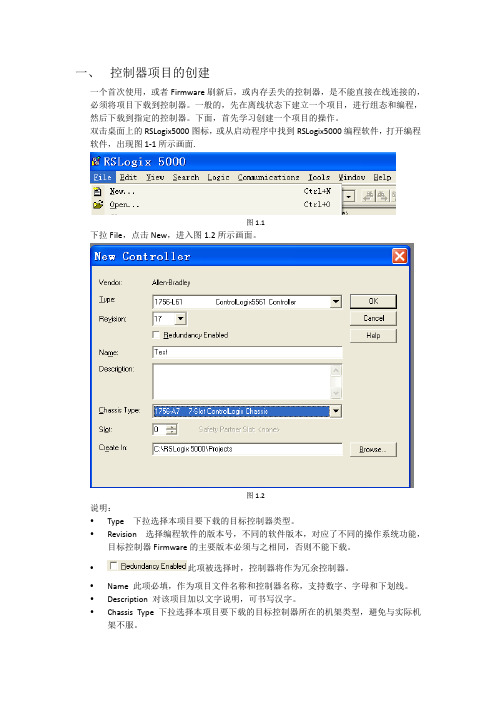
双击桌面上的RSLogix5000图标,或从启动程序中找到RSLogix5000编程软件,打开编程软件,出现图1‐1所示画面.图1.1下拉File,点击New,进入图1.2所示画面。
图1.2说明:y Type 下拉选择本项目要下载的目标控制器类型。
y Revision 选择编程软件的版本号,不同的软件版本,对应了不同的操作系统功能,目标控制器Firmware的主要版本必须与之相同,否则不能下载。
y此项被选择时,控制器将作为冗余控制器。
y Name 此项必填,作为项目文件名称和控制器名称,支持数字、字母和下划线。
y Description 对该项目加以文字说明,可书写汉字。
y Chassis Type 下拉选择本项目要下载的目标控制器所在的机架类型,避免与实际机架不服。
y Slot 指定本项目要下载的目标控制器在机架中所在槽的位置。
y Create In 指定本项目的磁盘存储文件在磁盘中的存放路径,默认值在C:\RSLogix 5000\Projects,亦可自行确定。
点击OK,进入如图1.3所示画面。
图1.3至此,一个项目被创建。
二、 本地I/O模块的建立和监控在I/O Configuration下,选中1756的背板,右击,选中New Module,出现下图所示画面。
1756机架可插放的模块在这里都能找到,亦可分类选择。
(1)数字量输入/输出模块的建立和监控数字量模块有8点、16点和32点之分,有交流和直流之分,有隔离和非隔离之分,模块用途各异,外端接线不同,不过组态过程是相似的。
点击New Module后,出现如下图所示画面。
由于要添加的是数字量模块,选择将Digital前的“+”展开,选择1756‐IB16D,这是一个16点24VDC输入模块带诊断功能,双击该模块,出现下图所示画面。
Logix5000在线监控与程序简介
PX2已经被Bypass(Not On报警的情况下),将 在下文介绍
PX2已经被Bypass(Not Off报警的情况下)
Tips:通常将C01.PX2这行程序写在本程序段的开头,即.Comp行的上面,本文为了方 便理解,没有将它放在开头
Cycle的工作完成信号, S010_MainCycle程序中将介绍
Tips:.Auto条件通常和动作顺序有关,比如夹具1的关闭动作需要在夹具2关闭到位后 才能执行,那么就需要把夹具2的Comp作为夹具1的Auto的条件,如下图所示
动作程序段 Sxxx
夹具动作程序
.Clear称为干涉条件,只有干 涉条件满足时,夹具才能动 作。本例中,夹具1关闭的干 涉条件是夹具3打开完成,也 就是说,只有夹具3打开的情 况下,夹具1才能关闭;如果 在夹具3关闭的情况下关闭夹 具1,那么就有可能产生机械 上的损坏。 .OutPwr是使能条件,通常考 虑安全条件是否满足、主气 路的气压是否正常,初学者 忽略
动作程序段 Sxxx
夹具动作程序
PM1表示本工位的1号阀岛 V1表示阀岛上的第一片电磁 阀 S14表示关闭动作,S12表示 打开动作 PM1.O.V1S14表示关闭PM1 上的V1阀,该点将在 B002_MapOutputs程序段中 控制阀片动作,后文将介绍 。
.Out输出信号为1时,将关闭 动作的记忆位.Mem置1,同 时将反向动作(打开)的记 忆位清零。反之亦然。 该记忆位将用来判断夹具动 作是否超时,后文将介绍 夹具动作的主体逻辑到此为止,以下是辅助逻辑,包括夹具动作的报警、触摸屏操 作的逻辑
HMI程序: HMI程序为标准程序,无需更改逻辑 初学者可忽略HMI程序 安全程序: 处理所有安全设备(光栅、安全门、急 停按钮等)逻辑 初学者可忽略安全程序
可编程控制器罗克韦尔RSLogix5000介绍
第二章RSLogix5000编程学习目标:■学会创建任务、程序、例程■深入理解标签、结构体和数组■掌握编写梯形图程序■学习I/O组态方法■掌握RSLogix5000功能块图编程122.1 编写RSLogix5000梯形图2.1.1 创建任务、程序和例程本次课程基于一个假想的工业环境。
您是一位压缩机装配项目程序开发人员。
图2-1描述了压缩机装配项目的整个工艺流程。
在该项目中,传送带上的压缩机经过三个装配站:冲压、卷边和焊接。
然后,压缩机被传送到第二个传送带并接受质量检查。
通过检查的压缩机码垛后装船运走。
图2-1 工艺流程图冲压、卷边和焊接三个装配站和传送带1由控制器P1控制,质量检查和码垛站以及传送带2由控制器P2控制。
图2-2给出了模拟各工作站运行时所用按钮和指示灯等离散量输入/输出点。
光眼检测到有部件放置到传送带上(PartSensor 由0变为1)后,站1、2和3顺序执行,然后传送带动作。
当光眼再次检测到有部件送至传送带上,上述操作再次执行,以此循环。
下面我们以时序图方式描述控制器P1的操作流程,如图2-3所示。
本实验主题:● 创建并组态一个控制器项目 ● 创建任务 ● 组态任务属性 ● 创建程序● 编辑程序排列表 ● 创建例程 ● 分配例程PartSensor 光眼检查码垛焊接卷边冲压3图2-2 各个按钮和指示灯的含义在了解了装配线工艺流程及控制器P1操作流程之后,您对项目主管说可以开始为控制器P1编程了,这让他感到很惊讶,因为以前都是在完成电气设计之后才能够编写控制程序。
在听过您的解释之后,他认为并行设计的方案是可行的。
同时,他也提醒你,如果该生产线效果良好,公司可能会再增加一条生产线,但控制器可能还是使用现有的ControlLogix 控制器,希望你在编程时考虑到这个问题。
Press 站工作中 StationActive光眼检测输入 PartSensorStake 站工作中 StationActiveWeld 站工作中StationActive光眼故障指示 Part_Sensor_Fault_Indicator传送带输出 ConveyorOutput(P1) 检查站工作中 StationActive码垛站工作中 StationActive检查通过 PartPASSED检查未通过 PartFAULT传送带输出ConveyorOutput(P2)光眼检测PartSensorPress站工作中StationActiveStake站工作中StationActiveWeld站工作中StationActive传送带输出ConveyorOutput(P1)图2-3 时序图实验步骤:1.双击桌面上图标,打开RSLogix5000软件,如图2-4所示。
RSLogix5000部分培训资料

如何解决数据丢失或损坏的问题?
解决方法
尝试从最近的备份文件中恢复数据,或者联系技术支持 寻求帮助。
34
THANKS FOR WATCHING
感谢您的观看
2024/1/26
35
定时器/计数器指令
用于实现定时和计数功能,如TON( 接通延时定时器)、TOF(断开延时 定时器)等。
数据处理指令
用于数据的转换、移位、传送等操作 ,如MOV(传送指令)、SHL(左移 指令)、SHR(右移指令)等。
21
程序结构设计与优化建议
程序结构设计原则:遵循模块化、层 次化、清晰化的设计原则,提高程序
I/O模块选择
根据实际需求,选择合适的I/O模块类 型,如数字量、模拟量、特殊功能等 。
地址分配
配置参数
设置I/O模块的参数,如输入类型、输 出类型、滤波时间等,以满足实际应 用需求。
为每个I/O模块分配唯一的地址,确保 数据能够正确传输。
2024/1/26
17
网络通讯设置及优化
网络类型选择
根据实际需求,选择合适的网络类型 ,如EtherNet/IP、ControlNet、 DeviceNet等。
通讯参数设置
设置网络通讯的各项参数,如波特率 、数据位、停止位、校验位等,以确 保数据能够正确传输。
网络优化
针对网络通讯性能进行优化,如减少 网络负载、提高数据传输效率等。
故障诊断与排除
当网络通讯出现故障时,能够快速定 位并解决问题。
2024/1/26
18
CHAPTER 04
梯形图编程基础
2024/1/26
12
常用操作快捷键
粘贴
Ctrl+V
ControlLogix5000系列大型PLC

ControlLogix软件系统包括集成软件开发平台RSLogix5000、通讯服务软件包RSLinx、网络组态软件RSNetWorx。
RSLogix5000软件是符合IEC61131-3标准的软件包,是一个包含编程、诊断、在线监控等功能的集成系统开发平台。系统的主要功能是为控制工程师和系统编程人员提供一个可以把他们的程序概念转变成一系列的程序图和定义用于快速地创建可执行程序。
通过在一个ControlLogix背板上安装多个处理器模块,每个处理器模块各自执行独立的控制任务。这样的系统需要进行系统规划,为每一个I/O指明宿主控制器。每一个处理器都可以读取任何一个输入模块发来的信号,并且向特定的输出模块发送指令。需要通过对系统的配置来明确每一个控制器对应控制那些输出模块。
图1-4多处理器的本地控制系统
图1-3 单处理器的本地控制系统
Contro1Logix的无源数据总线背板结构,不但使得处理器模块可以插在机架的任何槽位上,而且使得多个Logix5555处理器模块可以在一个机架上并存,这是Rockwell以前处理器所不具备的功能。ControlLogix允许多个Logix5555处理器模块插在同—个背板上,高速度的背板使每个处理器都可轻而易举的访问其他处理器的数据、从而实现I/O数据及其他信息的共享。其可实现的配置如图1-4所示。
采用生产者/消费者(Producer/Consumer)模型,支持对等(点对点)、多主和主从通讯方式,或三者的任意组合。高吞吐量5Mb/s的数据传送率用于改善I/O、控制器互锁以及对等通信报文传送的性能。
(3)设备层的网络
DeviceNet设备网网络是一种用于对底层设备信息传送现场总线网络。它既可以连接简单的底层工业设备,又可以连接像变频器、操作员终端这样的复杂设备。其物理层采用CAN总线技术,通过一根电缆将诸如可编程控制器、传感器、测量仪表、光电开关、变频器、操作员终端等现场智能设备连接起来,它是分布式控制理想的解决方案。
ControlLogix5000系列大型PLC
图1-3 单处理器的本地控制系统
Contro1Logix的无源数据总线背板结构,不但使得处理器模块可以插在机架的任何槽位上,而且使得多个Logix5555处理器模块可以在一个机架上并存,这是Rockwell以前处理器所不具备的功能。ControlLogix允许多个Logix5555处理器模块插在同—个背板上,高速度的背板使每个处理器都可轻而易举的访问其他处理器的数据、从而实现I/O数据及其他信息的共享。其可实现的配置如图1-4所示。
DeviceNet设备网网络虽然属于工业控制网络的底层网络,通讯速率不高,数据传输量也不大,但其具有低成本、高效率、高可靠性的特点。其同一网段上最多可以容纳64个节点,三种可选的数据传输速率:125kbit/s、250kbit/s、500kbit/s,采用生产者/消费者(Producer/Consumer)模型,支持对等(点对点)、多主和主从通讯方式。
由于ControlLogix控制器的无源数据总线背板结构,模块化的设计,加上性能卓越的处理器,ControlLogix控制器不仅具有先进的通讯能力和最新的I/O技术,而且可同时提供顺序、过程、运动和传动控制。因为系统是模块化的,所以用户就能够有效的设计、建立和更改系统。根据控制任务的要求,灵活的选择各种模块和数量,最后根据模块数量和规格来确定机架规格和电源型号。机架的型号规格分别有1756-A4, 1756-A7, 1756-A10, 1756-A13, 1756-A17几种规格,电源有1756-PA75,1756-PA75,1756-PA75R,1756-PA75R,
Rslogix5000编程-快速入门
RsLogix5000编程-快速入门什么是RsLogix5000?RsLogix5000是一款由Rockwell Automation公司开发的自动化控制编程软件。
它是用于PLC(可编程逻辑控制器)的编程环境,可让用户编写和管理自动化系统的控制程序。
RsLogix5000的优点与其他PLC编程软件相比,RsLogix5000有以下优点:•强大而灵活的功能;•易于学习;•可以支持可视化提高编程效率;•可以根据用户的实际需求扩展功能。
RsLogix5000的应用场景RsLogix5000主要用于:•机器人控制;•系统集成自动化;•智能制造。
环境设置在开始使用RsLogix5000编程之前,需要确保计算机上已安装以下软件:•Windows 7或更高版本;•RsLogix5000版本12或更高版本。
编程步骤RsLogix5000的编程步骤如下:1.创建新项目2.创建路线3.配置模块4.编写程序5.下载程序创建新项目在RsLogix5000中,首先需要创建一个新项目作为主编程文件。
在创建新项目时,需要设置一个项目名称,选择PLC类型和CPU型号。
此外,用户还需要选择一个IO配置,在此过程中必须选择一种适合PLC的IO模块。
创建路线新项目创建后,用户需要创建一个路线。
路线是指PLC与其他组件之间的连接,如传感器和执行器。
路线的创建涉及到安装IO模块,根据实际情况进行物理布线并为每个模块分配一个地址。
配置模块与传统PLC编程不同,RsLogix5000不直接使用地址寻址。
相反,它使用标记(Tag)来代表硬件组件。
标记可以自定义,可以通过逻辑表达式引用,并且容易识别。
在配置PLC时,用户需要创建一个位置,以定义模块的输入和输出。
在创建位置时,用户需要指定每个位置的模块型号,并为每个位置分配一个任务。
任务是指PLC要执行的特定控制器逻辑,例如转发节点信号或控制执行器。
编写程序实际编写PLC程序的过程称为配置程序。
RSLogix5000软件初步介绍
12
帮助系统
帮助菜单包含下面的选择: • 有以下标题的内容:
– 内容 (按列表浏览) – 索引 – 查找 (搜寻词组或单词)
• 根据指令类型分组的指令帮助 • Release notes • PDF形式的在线手册
Confidential -- For Internal Use Only. Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
重要:
不能够直接保存到软盘上.如果你这样做了,不管文 件多大,系统都会提示没有足够的空间。但我们可以 保存后,再把文件复制到软盘上
Confidential -- For Internal Use Only. Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
9
工具栏
RSLogix 5000 软件包含很多工具栏, 它们都可以按照用户的 选择来移动或关闭:
标准工具栏
在线工具栏
路径工具栏
新部件工具栏 梯形图编辑工具栏
梯形图通用逻辑工具栏
书签工具栏
语言要素工具栏
Confidential -- For Internal Use Only. Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
一个.l5k 工程文件 比 .acd 文件小得多
Confidential -- For Internal Use Only. Copyright © 2005 Rockwell Automation, Inc. All rights reserved.
RSlogix5000_培训手册
培训教材第一天培训内容——熟悉硬件和软件一、熟悉各硬件请查看各模块的外形,通讯模块,I/O模块,运动控制模块,处理器模块。
框架式设计可靠,安装容易,无需工具。
端子可取下,接线方便,更换快速。
将DEMO上电,插入ENBT/ENET, CNB通讯模块以及I/O模块(可以先不插入CPU)。
体会模块的带电热插拔特性。
安装方便。
二、认识RSLinx软件1、什么是RSLinx?RSLinx软件是工业通讯的枢纽。
它为所有的AB网络提供了完整的驱动程序。
通过RSLinx软件,用户可以通过一个窗口查看所有活动网络,也可以通过一个或多个通讯接口同时运行任何所支持的应用程序的组合。
RSLinx提供最快速的OPC、DDE和Custom C/C++的接口。
RSLinx还可以为用户提供多个网络、本地工作站和DDE/OPC性能诊断工具,便于进行系统维护和故障排错。
RSLinx Gateway驱动程序能够完美地支持TCP/IP客户与AB PLC控制器的连接,它也支持与远程OPC进行通讯。
RSLinx有以下几个版本,不同版本的功能不同,价格也不同,选购时应注意系统要求。
RSLogix and RSNetWorx RSViewRSLinxControlNet DeviceNet EtherNet/IPPLC-5 SLC ControlLogix FlexLogix CompactLogix2、使用RSLinx软件进行通讯1)打开RSLinx,点击或2)在工具条上点击选择Ethernet Devices(其它的驱动程序简单介绍), 按下 Add New 键单击 OK.3)增加以太网设备。
在增加以太网设备前,需要检查自己机器的IP设置,如果是192.168.1.xxx(一般的小型局域网都这样设置),以太网设备的IP地址设置如下。
单击OK.4)单击 Close5)检查本计算机的IP设定。
确认为: 192.168.1.XXX.6)单击。
可以看到,我们不需要CPU,就可以通讯。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电源 处 通 理 讯 器 板 处 I/O I/O 理 模 模 器 板 板 通 讯 板 I/O 模 板
Controllogix硬件介绍
控制器: L6X L7X
1756-L61 2M内存
1756-L61S 2M内存 1756-L62 4M内存 1756-L62S 4M内存 1756-L63 8M内存 1756-L63S 8M内存 1756-L63 XT 8M内存 1756-L64 16M内存 1756-L65 32M内存
处理器
Logix5550
RUN I/O
1 5 11
输出模块
AC OUTPUT
RS232 BAT OK
11 12 13 14 15 0 1 2 3 4 5 6 7 8 910 11 12 13 14 15 0 1 2 3 4 5 6 7 8 910 0 7 15
O K
RUN
REM
PROG
DIAGNOSTIC
特点2: ControlLogix 系统的基板设计
传统控制系统设计方法: 采用单一的主/从地址总线 • 由单一设备管理总线, 控制通讯 • 单点故障: 当控制器或总线“仲裁 器”故障时, 整个系统“Down” • 掉 • 集中式的设计方法 • 控制器不再作为控制系统的核心 • 无需控制器的介入,背板上任一个 设备可以发出广播信息,可以和任 何一个设备进行通讯 • 提高了系统的带宽和性能 – 为构造一个控制系统提供了极 大的方便 – 让控制器专注于控制
if A=12 then B
Logix 控制器
ControlLogix系统组成
机架
Logix5555™ ControlNET Logix5555™
RUN I/O RS232 BAT CHA CHB RUN REM PROG OK RUN REM PROG OK RXD TXD OK RXD TXD OK CHA CHB OK RXD TXD OK RUN REM PROG
Controller
控制器标签
System Task Motion Task Fault Task User Task User Task Configuration User Task Configuration Status Configuration Status Password Status Password Watchdog
CompactLogix 1769-L3x
CompactLogix 1769-L2x
•小型到中型系统 •模块化平台 •集成 EtherNet/IP 或 ControlNet •0.75 – 1.5 Mbyte 用户内 存
CompactLogix 1768-L4x
ControlLogix 1756-L6x, L7x
输入模块
DC INPUT
11 12 13 14 15 0 1 2 3 4 5 6 7 8 910 11 12 13 14 15 0 1 2 3 4 5 6 7 8 910
O K
处理器
Logix5550
RUN I/O RS232 BAT OK
输出模块
AC OUTPUT
1 5 11
11 12 13 14 15 0 1 2 3 4 5 6 7 8 910 11 12 13 14 15 0 1 2 3 4 5 6 7 8 910 0 7 15
<
> ETHERNET
<
> ETHERNET
ControlNET
<
> ETHERNET
A-B
Quality
RUN
I/O RS232
A#01
Allen-Bradley
BAT
A#01
A-B
Quality
RUN
I/O RS232
A#01
Allen-Bradley
BAT
A#01
OK
OK
电源 处 通 理 讯 器 板 处 I/O I/O 理 模 模 器 板 板 通 讯 板 I/O 模 板
ControlLogix系统选型及 RSLogix5000软件应用
控制器系列
SoftLogixTM ControlLogix®
CompactLogixTM
DriveLogixTM
PicoTM
MicrologixTM
2
Logix 控制器平台
Logix 平台的灵活性满足了一种技术解决各种应用问题的需要
特点6:多任务编程
• IEC61131-3 任务模式 • 多任务 (多达32个) 实时控制系统 – 适合典型 DCS 周期处理要求的周期性任务 (2~2000 ms可组态), 保证稳定高精度的复杂过程控制。 – 适合典型 PLC 快速、连续处理要求的事件任务及连续任务,并 且,15个优先级保证重要任务优先。 • 每个任务最多包含100个程序, 每个程序可包含任意多个子程序。 并且,每个程序拥有独立数据区,只需简单的Copy/ Paste即可实 现程序重复使用。
•小系统 •Integrated I/O •EtherNet/IP •有限 I/O 扩展 •512 Kbyte 用户内存
性能
•中型系统 •集成运动伺服 •多种网络EtherNet/IP, ControlNet •2 – 3 Mbyte 内存
•大系统 •集成运动伺服、安全 和冗余 •复杂的过程应用 •多CPU和多种网络 •高速 •网络网关 •2 – 32 Mbyte 用户内存
array[x] float int
#1 热风炉
#1程序 #2程序 #3程序
Program Program Program Program Program 数据 Program Local Data
#2 热风炉
Main Routine
#1程序 #2程序 #3程序
数据
I/O
I/O Data
struct
特点3:基于标签的编程方式
• 基于控制器的符号编程
1. 基于系统设备需求创建标记
2.写程序或创建通用代码块
3.然后将设备标记名映射到系统I/O上
4.无需改变代码!
特点4: 生产者/消费者模式
• ControlBusTM 如同所有模块的接口 – 输入模块向系统Produce数据 – 控制器和输出模块如同数据的 Producer 和 Consumer – 多设备可同时Consume数据 • 响应速度快 – 减少处理器负担和处理时间 – 多个节点能从单个生产者(数据源)同时接 收相同的数据 – 节点能够同步化(多信道广播) – 减少网络和背板信息传输量 – 减少 I/O等待时间 – 应用成为真正的中断驱动 • 控制器和操作员界面设备将共享I/O 数据 • I/O 数据共享为系统组态提供了更大的灵活 性
15
IO模块
1756-IA16 1756-OA16 1756-IB16 1756-OB16E 1756-IB32 1756-OB32 1756-IV16 1756-OV16E 1756-IV32 79-132 VAC Input 16 pts 74-265 VAC Output 16 pts 10-31 VDC Input 16 pts 10-31 VDC Elec Fused Output 16 pts 10-31 VDC Input 32 pts 10-31 VDC Output 32 pts 10-30 VDC Soucing Input 16 pts 10-30 VDC Sinking Output 16 pts 10-30 VDC Sourcing Input 32 pts 1756-OA8 1756-OB8 1756-OC8 1756-ON8 1756-IH16I 1756-OH8I 1756-IC16 1756-IM16I 1756-IN16 1756-OW16I 1756-OX8I 1756-IA16I 1756-OA16I 1756-IB16I 1756-OB16I 1756-IA8D 1756-OA8D 1756-IB16D 1756-OB16D 79-132 VAC Isolated Input 16 pts 74-265 VAC Isolated Output 16 pts 10-30 VDC Isolated Input 16 pts 10-30 VDC Isolated Output 16 pts 79-132 VAC Diagnostic Input 8 pts 74-132 VAC Diagnostic Output 8 pts 10-30 VDC Diagnostic Input 16 pts 19-30 VDC Diagnostic Output 16 pts Suffix D = Diagnostic, E = Electronic Fusing, I = Isolated 1756-OA8E 1756-OB8EI 74-265 VAC 2A Output 8 pts 10-30 VDC 2A Output 8 pts 30-60 VDC 2A Output 8 pts 10-30 VAC 2A Output 8 pts 90-146 VDC Isolated Input 16 pts 90-146 VDC Isolated 2A Output 8 pts 30-60 VDC Input 16 pts 159-265 VAC Isolated Input 16 pts 10-30 VAC Input 16 pts N.O. Isolated Relay Output 16 pts N.O./N.C. Isolated Relay Output 8 pts 74-132 VAC Elec Fused 2A Output 8 pts 10-30 VDC Isol. Elec Fused Output 8pts
1756-L71 2M内存
1756-L72 4M内存 1756-L72S 4M内存 1756-L73 8M内存 1756-L73S 8M内存 1756-L73 XT 8M内存 1756-L74 16M内存 1756-L75 32M内存