液压驱动四足仿生机器人理论、技术与实现(李贻斌,荣学文,李彬 著)思维导图
四足仿生机器人PPT课件

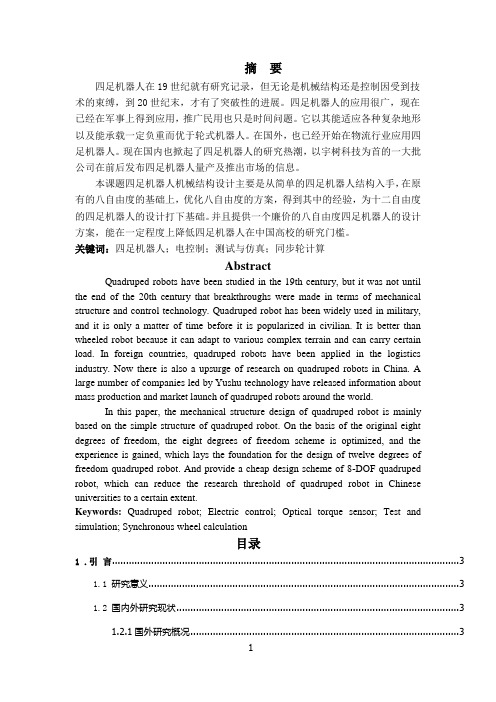
单自由度旋转关节模块
第22页/共30页
1、单自由度旋转装置
第23页/共30页
1、单自由度旋转装置
第24页/共30页
1、编码器 2、电机 3、壳体 4、齿轮箱 盖 5、第一辅助齿轮 15、第二辅助齿轮 6、中心齿轮 7、谐波 减速器组件 8、波发 生器 9、波发生器连 接法兰 11、中空连 接轴 16、第一角接 触球轴承 13、第二 角接触球轴承 14、 第一平键 12、第二平键 10、 第一轴用弹性挡圈 17、第二轴用弹性挡 圈 18、断电制动器 19、驱动控制器 20、 端盖
第11页/共30页
6、Cheetah
该结构中,前两条腿 比后两条腿要短20%,目 的是避免在迈大步距角的 时候出现腿相碰撞的情况。 腿的末端采用受电弓机构 的形式(其作用是使腿的 最上、最下部分运动一致, 同时减少自由度数目,简 化设计)。末端出的弹簧 装置在腿落地与离地时分 别起到储能、减小触地影 响,释放能量的作用。
第28页/共30页
谢谢!
第29页/共30页
感谢您的观看!
第30页/共30页
第14页/共30页
陆地上,速度最快的动物要属猎豹了,虽然目前有很多 研究者对狗与马的仿生研究有了很大的进展,但是有关猎豹 的报道并不多。猎豹奔跑速度一般可达30m/s,一秒跨过距 离是腿长的50倍,奔跑频率更是达到了3hz。所以,以猎豹 为仿生对象显得很有意义。
第15页/共30页
猎豹奔跑时,足末端运动 轨迹类似一个弧形的旋转运动。 奔跑过程中是前脚先着地,并 且前肢通常能使出2.5倍体重的 力量,后肢能使出1.5倍体重的 力量。力量越大,跳出的步幅 也就越大,奔跑速度也就变快 了。通常,能量储存的位置为 腿下部位置,像在髋关节几乎 就没有能量的存储。
四足机器人机械结构设计
摘要四足机器人在19世纪就有研究记录,但无论是机械结构还是控制因受到技术的束缚,到20世纪末,才有了突破性的进展。
四足机器人的应用很广,现在已经在军事上得到应用,推广民用也只是时间问题。
它以其能适应各种复杂地形以及能承载一定负重而优于轮式机器人。
在国外,也已经开始在物流行业应用四足机器人。
现在国内也掀起了四足机器人的研究热潮,以宇树科技为首的一大批公司在前后发布四足机器人量产及推出市场的信息。
本课题四足机器人机械结构设计主要是从简单的四足机器人结构入手,在原有的八自由度的基础上,优化八自由度的方案,得到其中的经验,为十二自由度的四足机器人的设计打下基础。
并且提供一个廉价的八自由度四足机器人的设计方案,能在一定程度上降低四足机器人在中国高校的研究门槛。
关键词:四足机器人;电控制;测试与仿真;同步轮计算AbstractQuadruped robots have been studied in the 19th century, but it was not untilthe end of the 20th century that breakthroughs were made in terms of mechanical structure and control technology. Quadruped robot has been widely used in military,and it is only a matter of time before it is popularized in civilian. It is better than wheeled robot because it can adapt to various complex terrain and can carry certainload. In foreign countries, quadruped robots have been applied in the logistics industry. Now there is also a upsurge of research on quadruped robots in China. Alarge number of companies led by Yushu technology have released information aboutmass production and market launch of quadruped robots around the world.In this paper, the mechanical structure design of quadruped robot is mainlybased on the simple structure of quadruped robot. On the basis of the original eight degrees of freedom, the eight degrees of freedom scheme is optimized, and the experience is gained, which lays the foundation for the design of twelve degrees of freedom quadruped robot. And provide a cheap design scheme of 8-DOF quadrupedrobot, which can reduce the research threshold of quadruped robot in Chinese universities to a certain extent.Keywords: Quadruped robot; Electric control; Optical torque sensor; Test and simulation; Synchronous wheel calculation目录1 .引言 (3)1.1 研究意义 (3)1.2 国内外研究现状 (3)1.2.1国外研究概况 (3)1.2.2国内研究概况 (5)1.2.3总体发展概况 (7)1.3主要研究内容 (8)2.四足机器人总体方案的基础理论规则 (9)2.1 四足哺乳动物的近似运动模型 (9)2.2 近似运动模型下的四足机器人设计规则 (9)2.3 四足机器人腿长腿间距的选取,及腿的布局 (10)2.4 四足机器人腿越长越稳、机身质量越大越稳 (13)2.5 前期验证总体方案的腿部结构测试(9月份测试模型) (14)2.5.1测试目的: (14)2.5.2测试结构方案: (14)2.5.3测试方式: (15)2.5.4测试结果以及优化方案: (15)3.冲击设计:估计碰撞过程中的传输载荷 (20)3.1 碰撞的鲁棒性对机械结构的影响 (20)3.2 通心轴的有限元分析 (22)3.2.1 Soildworks2019简介 (22)3.2.2 Soildworks2019 Simulation 插件介绍以及通心轴有限元分析 (22)3.3 同步轮及同步带节线长的计算 (23)4.整体方案的确定以及优化 (24)4.1 同步轮及同步带节线长的计算 (24)4.2 整体机构具体方案实物展示及二次优化方案 (25)4.2.1 第一版的优化方案(已做出实物): (25)4.2.2 第二版的优化方案: (26)5. 三维建模图展示 (27)6. 总结 (28)1 .引言1.1 研究意义足式机器人未来的发展前景很大,它除了能应用在军事、航空探索领域上以外(例如扫雷排雷、运输物资等),还能在物流行业(外卖配送、快递运输等)、教育行业(硬件的学习以及功能、算法的开发等)还有智能家电等行业占有一席之地。
连续电驱动四足机器人腿部机构设计与分析

连续电驱动四足机器人腿部机构设计与分析一、本文概述随着科技的不断发展,机器人技术已经成为现代工程领域的重要研究方向。
四足机器人作为一种能够适应复杂地形和环境的机器人类型,受到了广泛关注。
连续电驱动四足机器人作为一种新型的四足机器人,其腿部机构的设计与分析对于提高机器人的运动性能和稳定性具有重要意义。
本文旨在对连续电驱动四足机器人的腿部机构进行深入探讨,包括其设计原理、分析方法以及优化策略等。
本文将对连续电驱动四足机器人的基本结构和特点进行介绍,阐述其相较于传统四足机器人的优势。
随后,文章将详细分析连续电驱动四足机器人腿部机构的设计原理,包括驱动方式、传动机构、关节配置等关键要素,为后续的分析和优化提供理论基础。
在分析方法方面,本文将介绍多种适用于连续电驱动四足机器人腿部机构的分析技术,如运动学分析、动力学分析、有限元分析等。
这些分析方法将有助于全面评估腿部机构的性能,为优化设计提供指导。
本文还将探讨连续电驱动四足机器人腿部机构的优化策略。
通过对现有设计进行改进和创新,提高机器人的运动效率、稳定性和适应性,为四足机器人在实际应用中的推广和发展奠定基础。
通过本文的研究,我们期望能够为连续电驱动四足机器人腿部机构的设计与分析提供有益的参考和借鉴,推动四足机器人技术的不断发展和进步。
二、四足机器人腿部机构设计四足机器人的腿部机构设计是整个机器人设计的核心部分,它直接关系到机器人的运动性能、稳定性和环境适应性。
在设计过程中,我们主要考虑了腿部机构的自由度、结构强度、运动范围、驱动方式以及与控制系统的协调性等因素。
自由度设计:腿部机构的设计首先需要考虑其自由度。
自由度过高可能导致控制系统复杂,而自由度过低则可能限制机器人的运动范围。
我们采用了适当的自由度设计,既保证了机器人能够完成各种复杂动作,又使得控制系统相对简化。
结构强度:四足机器人需要在各种环境中工作,这就要求其腿部机构必须具有足够的结构强度。
我们采用了高强度材料,如铝合金和碳纤维复合材料,来制造腿部结构,并通过有限元分析等方法对结构进行了优化,以确保其强度和刚度满足要求。
液压驱动机械臂的设计与关节驱动分析

液压驱动机械臂的设计与关节驱动分析高进芃;熊禾根;陶永;刘辉;谢光【摘要】A new 6-DOF serial manipulator was designed, and its joint driving control method based on hydraulic swing cylinder was proposed.The manipulator arm is driven by two hydraulic cylinders which are perpendicular to each other, and the control signals are given by the closed loop control system which uses hydraulic drive and consists of the host computer, signal control card and potential sensor.The manipulator's 3-D model was constructed, the kinematics modeling was conducted by using the D-H method, and the forward kinematics analysis was performed.Finally, the experimental analysis of the manipulator joint control method based on hydraulic swinging cylinder was carried out, and the relationship between the running speed of the manipulator's joints and the duty cycle of the pulse width modulation (PWM) governor is obtained.The experiment gave the corresponding joint motion relationships to provide the references for the study of the control of series manipulator position and the motion path of a manipulator.%设计了一种新型六自由度串联机械臂,并提出了基于液压摆动缸的机械臂驱动关节控制方法.机械臂驱动关节由两个输出轴相互垂直的液压摆动缸提供动能,驱动形式采用闭环液压驱动,闭环控制系统由上位机、信号控制卡、电位传感器等组成.建立了该机械臂的三维模型,应用D-H方法对其进行了运动学建模和正向运动学分析,最后对基于液压摆动缸的机械臂驱动关节控制方法进行了实验分析,得出了机械臂关节运行速度与脉宽调制(PWM)调速占空比的关系,根据实验结果得出了相应的运动曲线关系,为串联机械臂位置控制、运动路径控制研究提供了基础.【期刊名称】《高技术通讯》【年(卷),期】2017(027)002【总页数】7页(P177-183)【关键词】串联机械臂;液压摆动缸;关节驱动控制;D-H运动学方程;脉宽调制(PWM)占空比;调速【作者】高进芃;熊禾根;陶永;刘辉;谢光【作者单位】武汉科技大学机械自动化学院武汉 430081;武汉科技大学机械自动化学院武汉 430081;北京航空航天大学机械工程及自动化学院北京 100191;北京航空航天大学机械工程及自动化学院北京 100191;武汉科技大学机械自动化学院武汉 430081【正文语种】中文机械臂是目前机器人领域中得到最广泛应用的机械装置,用于替代汽车制造、电子电气等行业中的人工操作,极大地降低人力成本,和提高生产效率,并有效地提高产品生产质量。
四足机器人运动及稳定控制关键技术综述
四足机器人运动及稳定控制关键技术综述目录一、内容概览 (2)1. 四足机器人概述 (3)2. 研究背景与意义 (4)3. 研究现状和发展趋势 (5)二、四足机器人运动原理及结构 (7)1. 四足机器人运动原理 (8)1.1 动力学模型建立 (9)1.2 运动规划与控制策略 (10)2. 四足机器人结构组成 (11)2.1 主体结构 (13)2.2 关节与驱动系统 (14)2.3 感知与控制系统 (17)三、四足机器人运动控制关键技术 (19)1. 运动规划算法研究 (20)1.1 基于模型预测控制的运动规划算法 (21)1.2 基于优化算法的运动规划策略 (22)2. 稳定性控制策略研究 (23)2.1 静态稳定性控制策略 (25)2.2 动态稳定性控制策略 (26)3. 路径规划与轨迹跟踪控制技术研究 (27)3.1 路径规划算法研究 (28)3.2 轨迹跟踪控制策略设计 (29)四、四足机器人稳定控制实现方法 (31)1. 基于传感器反馈的稳定控制方法 (32)1.1 传感器类型与布局设计 (34)1.2 传感器数据采集与处理技术研究 (35)2. 基于优化算法的稳定控制方法应用探讨 (37)一、内容概览四足机器人运动机制:阐述四足机器人的基本运动模式,包括行走、奔跑、跳跃等,以及不同运动模式之间的转换机制。
稳定性分析:探讨四足机器人在运动过程中的稳定性问题,包括静态稳定性和动态稳定性,以及影响稳定性的因素。
运动控制关键技术:详细介绍四足机器人运动控制的关键技术,包括运动规划、轨迹跟踪、力控制等,以及这些技术在实现机器人稳定运动中的应用。
传感器与感知技术:介绍四足机器人运动及稳定控制中涉及的传感器与感知技术,包括惯性测量单元(IMU)、激光雷达、视觉传感器等,以及这些技术在机器人运动控制中的作用。
控制算法与策略:探讨四足机器人运动及稳定控制中常用的控制算法与策略,包括基于模型的控制、智能控制方法等,以及这些算法在实际应用中的效果。
四足机器人PPT

第四章机械系统设计4.2机器人机构4.2.1 仿生机器人机构4.2.2 典型工业机器人机构4.2.3 工业机器人机构应用实例影视机器人现实机器人4.2 机器人机构双足机器人Petman是美军仿人机器人中的佼佼者,它的职能是为美军实验防护服装。
波士顿动力公司承诺说Petman能维持平衡,灵活行动。
行走、匍匐、以及应对有毒物质的一系列动作对它来说都不成问题。
它还能调控自身的体温、湿度和排汗量来模拟人类生理学中的自我保护功能,从而达到最佳的测试效果。
PETMAN机器人典型多连杆式四足机械结构LittleDog机器人LittleDog由南加州大学开发,估计是目前最有思考的机器狗,他的内置处理器能够判断目前地形从而采取更正确的步伐前进。
同时它最强亮点,是具有学习功能,能记住正确和错误的步伐,不会被同样的地形绊倒2次BigDog机器人由美国武器合约商波士顿动力公司研发的一套科技含量非常高的装置——“大狗”(BigDog)运输机器人。
它高约1米,重75kg采用汽油发动机驱动。
有四只强有力的腿,每条腿有三个靠传动装置提供动力的关节,并有一个“弹性”关节。
这些关节由一个机载计算机处理器控制。
它体内装有维持机身平衡的回转仪,内力传感器等,可探测到地势变化根据情况做出调整。
它的最高负载量可达340磅,以每小时4英里的速度行走,而且可在丘陵地形上攀登前行,全靠本身的立体视觉系统或远程遥控器确认路径。
躯体运动形式给每个液压缸加上驱动,通过活塞的往复运动使相配合关节相对转动动画Jansen Walker仿生机械Jansen Walker是由荷兰工艺家泰奥•扬森(Theo Jansen)利用塑胶管、塑胶瓶等普通材料创造的一种新型“生命”。
该机构运用风力作为动力实现行走,并利用塑胶瓶存储风量,在没有风的情况下也可以实现行走。
四足机械步行和轮滑自动切换的轮式四足机器人六足和多足机械六足的蚂蚁八足的蜘蛛多足的蜈蚣RISE 是一个攀爬机器人,它可以攀爬墙面,树木和篱笆。
四足机器人步态及运动控制
发展阶段
随着科技的进步,尤其是计算机技 术和机械设计的发展,四足机器人 在20世纪90年代进入快速发展阶 段。
创新阶段
近年来,随着人工智能和深度学习 技术的突破,四足机器人的智能化 程度越来越高,性能和应用领域也 得到了极大的拓展。
四足机器人的分类及特点
根据驱动方式
四足机器人可以分为液压驱动、气压驱动和电动驱动等类型。液压驱动具有负载能力强、精度高的优点,但易受 环境温度影响。气压驱动具有速度快、响应灵敏的优点,但易受气压波动影响。电动驱动具有节能环保、维护方 便的优点,但需要良好的电源管理系统。
步态选择的原则与影响因素
选择四足机器人的步态应根据具 体的应用场景和需求进行考虑。
原则上,应考虑机器人的运动效 率、稳定性、灵活性和适应性等
方面的需求。
影响因素包括机器人的重量、负 载、能源供应、环境条件等。
03
四足机器人的运动控制方 法基于模型ຫໍສະໝຸດ 控制方法模型预测控制(MPC)
利用机器人的动力学模型进行预测和控制,考虑了机器人运动的各种约束条件 ,如速度、加速度、关节角度等,以达到最优的控制效果。
基于学习的控制方法
深度学习控制
利用深度学习算法,通过对大量数据进行学习,让机器人能够自适应各种复杂的 未知环境。
强化学习控制
通过强化学习算法,让机器人在实际环境中通过自我试错进行学习,从而找到最 优的控制策略。
04
四足机器人的步态及运动 控制实验
四足机器人实验平台介绍
实验平台组成
四足机器人实验平台主要由机械系统、控制系统、感知系 统三部分组成。
混合步态则结合了静态和动态步态的 特点,以实现机器人的特定运动需求 。
基于Webots仿真软件的四足机器人建模和运动控制
基于Webots仿真软件的四足机器人建模和运动控制辛亚先;李彬;洪真【摘要】运用计算机进行机器人仿真,首先对四足机器人模型的各项参数进行设定,对各部分关系进行分析;在此基础上利用Webots 8.3仿真平台构建机器人的3D模型、分析了机器人控制原理,以及如何创建和添加控制器。
【期刊名称】《齐鲁工业大学学报:自然科学版》【年(卷),期】2016(030)002【总页数】7页(P45-51)【关键词】Webots软件四足机器人建模方法控制方法【作者】辛亚先;李彬;洪真【作者单位】齐鲁工业大学理学院,山东济南250353【正文语种】中文【中图分类】TP242仿真技术是机器人理论研究中的一个重要组成部分。
利用各种仿真和离线编程系统对机器人的性能和特点进行试验和改进,首先,避免了不恰当的控制策略对昂贵的物理样机的损坏;其次,其成果为物理样机制造提供了有效的理论依据和方法指导。
因此,机器人仿真系统对于机器人理论和实践有着显而易见的价值和意义。
目前,机器人仿真软件众多,其中,国外的许多仿真软件比较成熟,国内很多此类研究都是在已有软件的基础上进行的二次开发[1]。
国外众多成熟的仿真软件,各自有其不同的功能侧重,因此,可以根据仿真目标的不同,选择合适的仿真软件。
例如,ADAMS仿真软件其优势在于可以对复杂机械系统进行仿真,一般用来分析和比较多种不同参数的方案,给出优化的工作性能[2];Microsoft Robotics Studio 机器人仿真平台由微软公司研发,它的功能丰富而且扩展性强,用户可以使用图形化的数据流驱动逻辑运算[3];Open Dynamics Engine(ODE)是由Russell Smith最初研发的开源免费物理引擎,它包含刚体动力学模拟引擎和碰撞检测引擎两部分,让用户可以更方便的使用各种功能实现对物理环境的仿真[4];Robotbuilder是由Rodenbaugh 开发的一款机器人动力学仿真软件,可适用于windows系统,其包含构建模式、仿真模式和回放模式,已被俄亥俄州立大学用于机器人教学课程[5];ROBCAD仿真软件侧重于图形的设计和运算,可输出机器人任一零部件的尺寸[6]。
《2024年度四足机器人液压驱动单元模糊滑模变结构控制研究》范文
《四足机器人液压驱动单元模糊滑模变结构控制研究》篇一一、引言随着科技的不断发展,四足机器人在工业、军事、救援等多个领域的应用越来越广泛。
然而,四足机器人的运动控制一直是其技术难题之一。
液压驱动单元作为四足机器人的重要组成部分,其控制策略的优化对于提高机器人的运动性能和稳定性具有重要意义。
本文针对四足机器人液压驱动单元的模糊滑模变结构控制进行研究,旨在为四足机器人的运动控制提供新的思路和方法。
二、四足机器人液压驱动单元概述四足机器人液压驱动单元主要由液压泵、液压缸、液压管路等组成。
其工作原理是通过液压泵将液压油输送到液压缸中,驱动四足机器人的运动。
然而,由于液压系统的非线性和不确定性,传统的控制方法往往难以实现四足机器人的精确控制和稳定运动。
因此,研究新型的控制策略对于提高四足机器人的性能和稳定性具有重要意义。
三、模糊滑模变结构控制理论模糊滑模变结构控制是一种基于模糊控制和滑模控制的混合控制方法。
它通过引入模糊逻辑来处理系统的不确定性和非线性,同时利用滑模控制的鲁棒性来提高系统的稳定性和精确性。
该方法具有自适应、自学习和智能性等特点,能够有效地解决四足机器人液压驱动单元的控制问题。
四、四足机器人液压驱动单元的模糊滑模变结构控制研究针对四足机器人液压驱动单元的控制问题,本文提出了一种基于模糊滑模变结构控制的控制策略。
首先,通过建立四足机器人液压驱动单元的数学模型,分析系统的非线性和不确定性。
然后,设计模糊控制器和滑模控制器,并采用变结构控制方法将两者进行有机结合。
在控制过程中,通过模糊逻辑处理系统的不确定性和非线性,同时利用滑模控制的鲁棒性来提高系统的稳定性和精确性。
此外,根据系统的运行状态,动态调整控制器的参数,以实现最优的控制效果。
五、实验结果与分析为了验证本文提出的控制策略的有效性,我们进行了大量的实验。
实验结果表明,采用模糊滑模变结构控制的四足机器人液压驱动单元具有更好的运动性能和稳定性。
与传统的控制方法相比,该控制策略能够更好地处理系统的非线性和不确定性,提高机器人的运动精度和稳定性。
液压驱动四足机器人单腿结构设计与分析
液压驱动四足机器人单腿结构设计与分析马雪亭;董霞;李森【摘要】为实现四足机器人不同路况下的正常工作,设计了液压驱动的单腿结构.首先,提出了四自由度单腿机构设计方案,建立了单腿简化结构的运动学模型,并利用SimMechanis进行了仿真,通过优化结构参数,获得了最佳的足部运动空间.然后,以上述结构参数为设计条件,进行了单腿的结构设计和运动学仿真.仿真结果验证了腿部结构可以达到理想的运动空间,最后,对受力分析结果进行了研究,以减小液压缸的受力为目标,为机器人在不同的路况下选择不同的步态提供了依据,可以提高机器人的适应性.【期刊名称】《机械设计与制造》【年(卷),期】2018(000)012【总页数】4页(P121-124)【关键词】液压驱动;四足机器人;平面机构;SimMechanics仿真;运动学;动力学【作者】马雪亭;董霞;李森【作者单位】西安交通大学机械工程学院机械电子工程研究所,陕西西安 710049;西安交通大学机械工程学院机械电子工程研究所,陕西西安 710049;西安交通大学机械工程学院机械电子工程研究所,陕西西安 710049【正文语种】中文【中图分类】TH16;TP2421 引言移动机器人在工业、建筑、军事、农业等领域有广泛的应用前景。
根据移动方式,可分为如下几种:轮式、步行(足式)、履带式、其他特殊性机器人。
其中,足式机器人有很大的适应性,尤其在非结构性的环境中更有优越性。
足式机器人有两足、三足、四足、六足、八足的形式。
两足机器人虽然有很好的适应性,但是在保证静、动行走性能和稳定性方面是最困难的,而对于六足、八足的机构形式,虽然足部个数越多越稳定,但是相应的机构的复杂度也在不断增加;因此四足机器人的研究一直是国内外机器人领域研究的热点之一[1]。
在很多情况下,足式机器人要求较高的负载能力,快速启动特性,与此同时,它们还要求具有可携带性,紧凑等特点,而液压驱动有独特的优势:高功率密度比、提供过载保护、较高的带宽[2],因此液压驱动在足式机器人中得到了广泛的应用。